竞争与协作
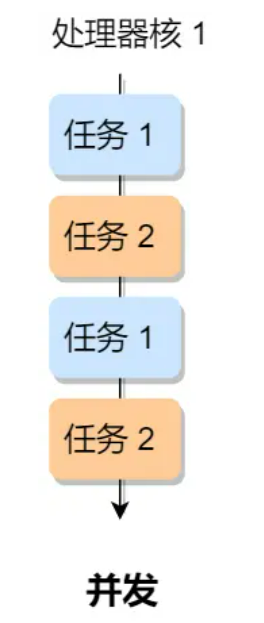
在单核 CPU 系统里,为了实现多个程序同时运行的假象,操作系统通常以时间片调度的方式,让每个进程执行每次执行一个时间片,时间片用完了,就切换下一个进程运行,由于这个时间片的时间很短,于是就造成了「并发」的现象。
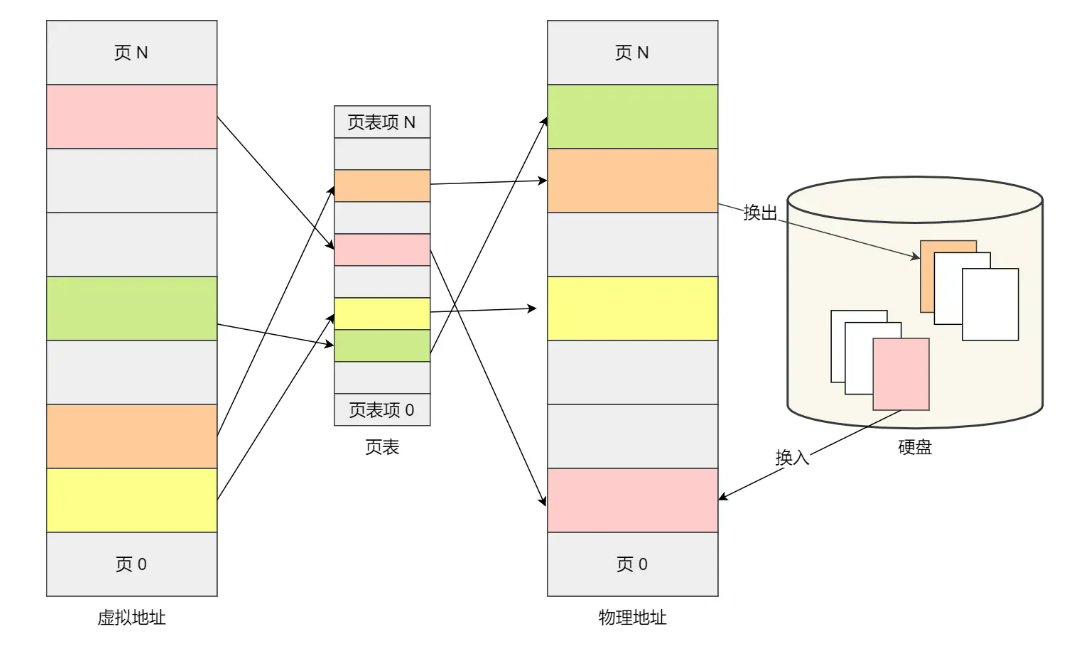
另外,操作系统也为每个进程创建巨大、私有的虚拟内存的假象,这种地址空间的抽象让每个程序好像拥有自己的内存,而实际上操作系统在背后秘密地让多个地址空间「复用」物理内存或者磁盘。
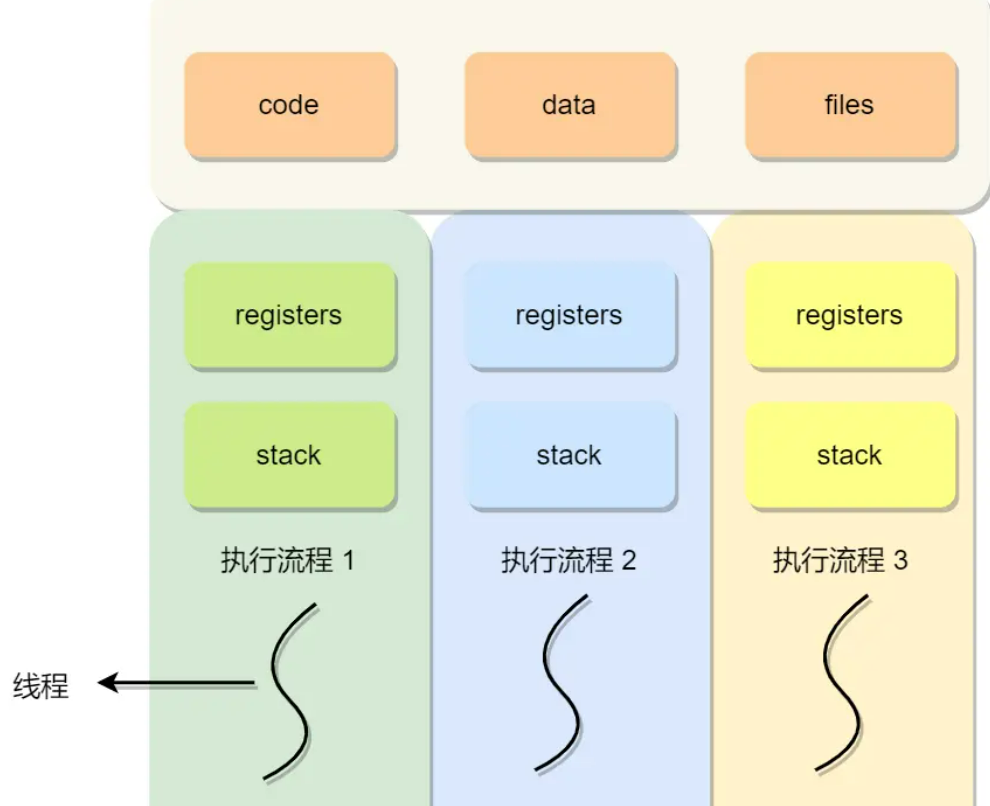
如果一个程序只有一个执行流程,也代表它是单线程的。当然一个程序可以有多个执行流程,也就是所谓的多线程程序,线程是调度的基本单位,进程则是资源分配的基本单位。
所以,线程之间是可以共享进程的资源,比如代码段、堆空间、数据段、打开的文件等资源,但每个线程都有自己独立的栈空间。
那么问题就来了,多个线程如果竞争共享资源,如果不采取有效的措施,则会造成共享数据的混乱。
假设现在创建了2个线程,要对i=i+1循环一千次,会出现什么结果?
假设 i == 100
线程 A 读取 i = 100
线程 B 读取 i = 100
A 执行
i + 1得到 101,准备写入B 执行
i + 1也得到 101,准备写入A 写入 i = 101
B 也写入 i = 101(把 A 的写入覆盖了)
本应 i = 102,但只加了 1,加1“丢失”了。
互斥的概念
上面展示的情况称为竞争条件(race condition),当多线程相互竞争操作共享变量时,由于运气不好,即在执行过程中发生了上下文切换,我们得到了错误的结果,事实上,每次运行都可能得到不同的结果,因此输出的结果存在不确定性(indeterminate)。
由于多线程执行操作共享变量的这段代码可能会导致竞争状态,因此我们将此段代码称为临界区(criticalsection),它是访问共享资源的代码片段,一定不能给多线程同时执行。
我们希望这段代码是互斥(mutualexclusion)的,也就说保证一个线程在临界区执行时,其他线程应该被阻止进入临界区,说白了,就是这段代码执行过程中,最多只能出现一个线程。
另外,说一下互斥也并不是只针对多线程。在多进程竞争共享资源的时候,也同样是可以使用互斥的方式来避免资源竞争造成的资源混乱。
同步的概念
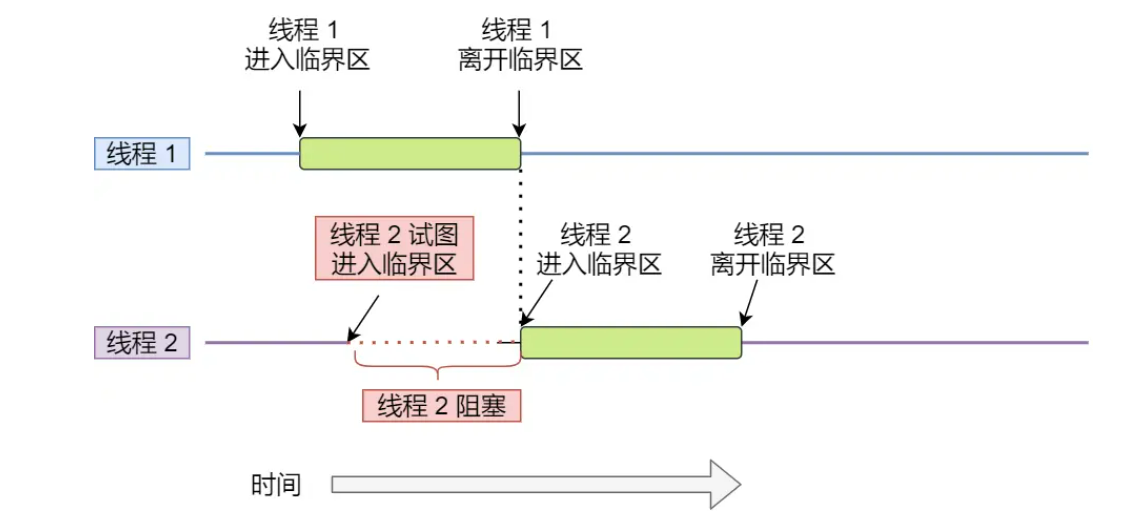
互斥解决了并发进程/线程对临界区的使用问题。这种基于临界区控制的交互作用是比较简单的,只要一个进程/线程进入了临界区,其他试图想进入临界区的进程/线程都会被阻塞着,直到第一个进程/线程离开了临界区。
我们都知道在多线程里,每个线程并不一定是顺序执行的,它们基本是以各自独立的、不可预知的速度向前推进,但有时候我们又希望多个线程能密切合作,以实现一个共同的任务。
例子,线程 1 是负责读入数据的,而线程 2 是负责处理数据的,这两个线程是相互合作、相互依赖的。线程 2 在没有收到线程 1 的唤醒通知时,就会一直阻塞等待,当线程 1 读完数据需要把数据传给线程 2时,线程 1 会唤醒线程 2,并把数据交给线程 2 处理。
所谓同步,就是并发进程/线程在一些关键点上可能需要互相等待与互通消息,这种相互制约的等待与互通信息称为进程/线程同步。
互斥与同步的实现和使用
为了实现进程/线程间正确的协作,操作系统必须提供实现进程协作的措施和方法,主要的方法有两种:
- 锁:加锁、解锁操作;
- 信号量:P、V 操作;
这两个都可以方便地实现进程/线程互斥,而信号量比锁的功能更强一些,它还可以方便地实现进程/线程同步。
锁
使用加锁操作和解锁操作可以解决并发线程/进程的互斥问题。
任何想进入临界区的线程,必须先执行加锁操作。若加锁操作顺利通过,则线程可进入临界区;在完成对临界资源的访问后再执行解锁操作,以释放该临界资源。
根据锁的实现不同,可以分为「忙等待锁」和「无忙等待锁」。
忙等待锁
在说明「忙等待锁」的实现之前,先介绍现代 CPU 体系结构提供的特殊原子操作指令 —— 测试和置位(Test-and-Set)指令。
如果用 C 代码表示 Test-and-Set 指令,形式如下:
int TestAndSet(int *old_ptr,int new){int old=*old_ptr;*old_ptr=new;return old;
}
测试并设置指令做了下述事情:
int *old_ptr:指向某个共享变量(通常是锁变量)int new:你想设置的新值(例如 1,表示“加锁”)
当然,关键是这些代码是原子执行。因为既可以测试旧值,又可以设置新值,所以我们把这条指令叫作「测试并设置」。
那什么是原子操作呢?原子操作就是要么全部执行,要么都不执行,不能出现执行到一半的中间状态我们可以运用 Test-and-Set 指令来实现「忙等待锁」,代码如下:
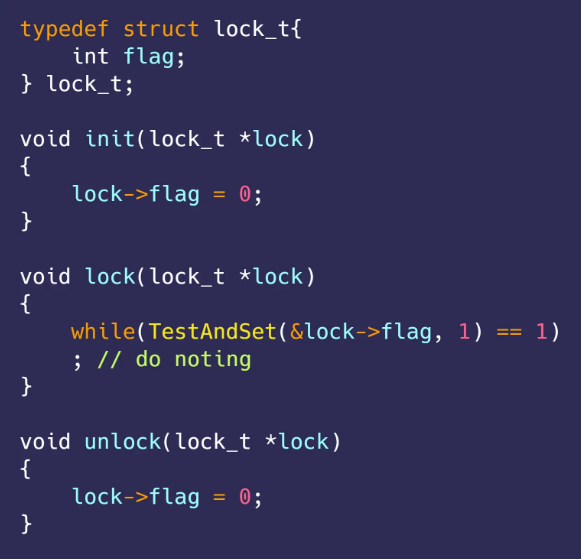
我们来确保理解为什么这个锁能工作:
- 第一个场景是,首先假设一个线程在运行,调用
lock(),没有其他线程持有锁,所以flag是 0。没有其他线程持有锁,所以flag是 0。没有其他线程持有锁,所以flag是 0。同时也会原子的设置flag 为1,标志锁已经被持有。当线程离开临界区,调用unlock()将flag清理为 0。 - 第二种场景是,当某一个线程已经持有锁(即
flag为1)。本线程调用lock(),然后调用TestAndSet(flag, 1),这一次返回 1。只要另一个线程一直持有锁,TestAndSet()会重复返回 1,本线程会一直忙等。当flag终于被改为 0,本线程会调用TestAndSet(),返回 0 并且原子地设置为 1,从而获得锁,进入临界区。
很明显,当获取不到锁时,线程就会一直 while 循环,不做任何事情,所以就被称为「忙等待锁」,也被称为自旋锁(spin lock)。
这是最简单的一种锁,一直自旋,利用 CPU 周期,直到锁可用。在单处理器上,需要抢占式的调度器(即不断通过时钟中断一个线程,运行其他线程)。否则,自旋锁在单 CPU 上无法使用,因为一个自旋的线程永远不会放弃 CPU。
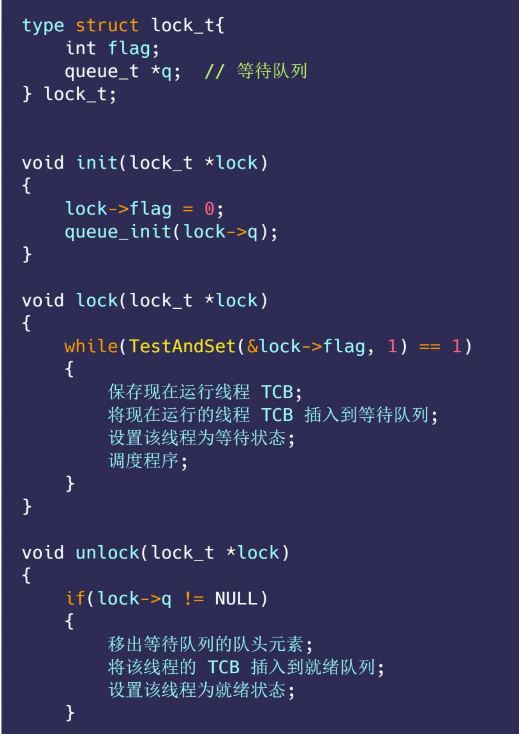
无等待锁
无等待锁顾明思议就是获取不到锁的时候,不用自旋。
既然不想自旋,那当没获取到锁的时候,就把当前线程放入到锁的等待队列,然后执行调度程序,把 CPU让给其他线程执行。
信号量
信号量是操作系统提供的一种协调共享资源访问的方法。
通常信号量表示资源的数量,对应的变量是一个整型(sem)变量。
另外,还有两个原子操作的系统调用函数来控制信号量的,分别是:
- P 操作:将
sem减1,相减后,如果sem < 0,则进程/线程进入阻塞等待,否则继续,表明 P 操作可能会阻塞; - V 操作:将
sem加1,相加后,如果sem <= 0,唤醒一个等待中的进程/线程,表明 V 操作不会阻塞;
P 操作是用在进入临界区之前,V 操作是用在离开临界区之后,这两个操作是必须成对出现的。
PV 操作的函数是由操作系统管理和实现的,所以操作系统已经使得执行 PV 函数时是具有原子性的。
PV 操作如何使用的呢
我们先来说说如何使用信号量实现临界区的互斥访问。
为每类共享资源设置一个信号量 s,其初值为 1,表示该临界资源未被占用。
任何想进入临界区的线程,必先在互斥信号量上执行 P 操作,在完成对临界资源的访问后再执行 V操作。由于互斥信号量的初始值为 1,故在第一个线程执行 P 操作后 s 值变为 0,表示临界资源为空闲,可分配给该线程,使之进入临界区。
若此时又有第二个线程想进入临界区,也应先执行 P 操作,结果使 s 变为负值,这就意味着临界资源已被占用,因此,第二个线程被阻塞。
并且,直到第一个线程执行 V 操作,释放临界资源而恢复 s 值为 0 后,才唤醒第二个线程,使之进入临界区,待它完成临界资源的访问后,又执行 V 操作,使 s 恢复到初始值 1。
对于两个并发线程,互斥信号量的值仅取 1、0 和 -1 三个值,分别表示:
- 如果互斥信号量为 1,表示没有线程进入临界区;
- 如果互斥信号量为 0,表示有一个线程进入临界区;
- 如果互斥信号量为 -1,表示一个线程进入临界区,另一个线程等待进入。
通过互斥信号量的方式,就能保证临界区任何时刻只有一个线程在执行,就达到了互斥的效果。
再来,我们说说如何使用信号量实现事件同步。
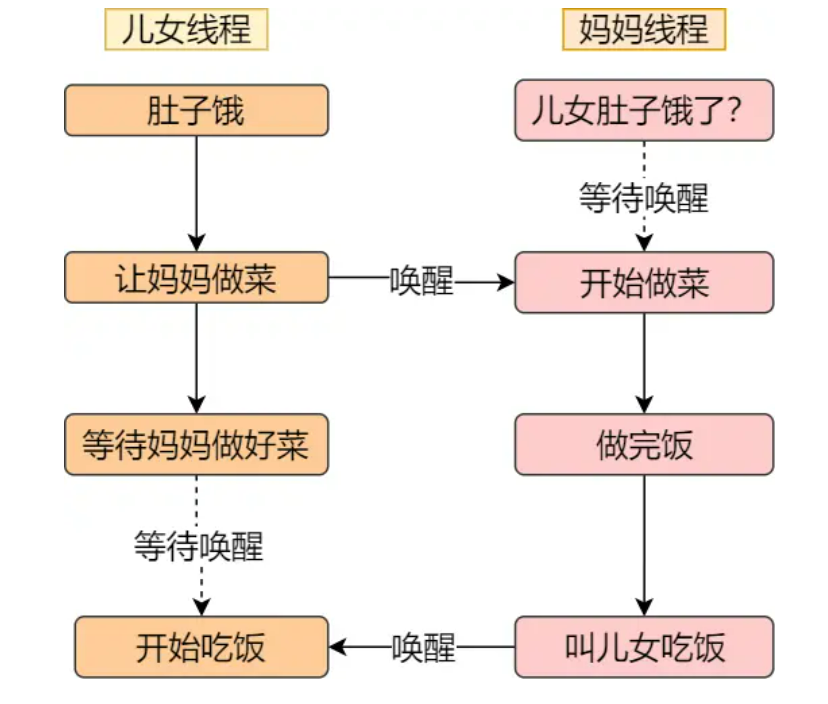
同步的方式是设置一个信号量,其初值为 0。
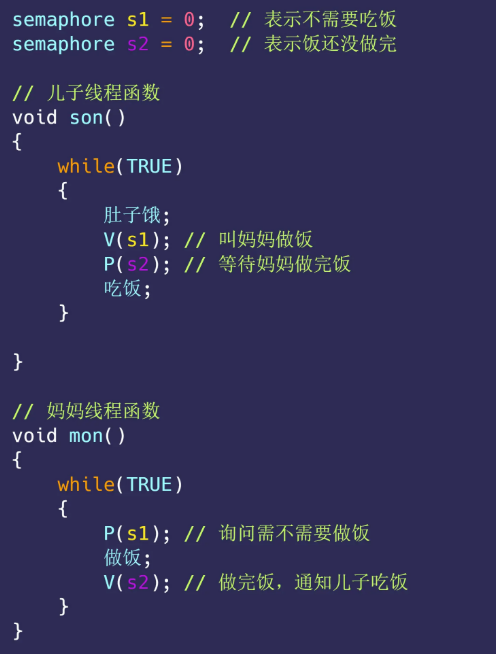
妈妈一开始询问儿子要不要做饭时,执行的是 P(s1) ,相当于询问儿子需不需要吃饭,由于 s1 初始值为 0,此时 s1 变成 -1,表明儿子不需要吃饭,所以妈妈线程就进入等待状态。
当儿子肚子饿时,执行了 V(s1),使得 s1 信号量从 -1 变成 0,表明此时儿子需要吃饭了,于是就唤醒了阻塞中的妈妈线程,妈妈线程就开始做饭。
接着,儿子线程执行了 P(s2),相当于询问妈妈饭做完了吗,由于 s2 初始值是 0,则此时 s2 变成-1,说明妈妈还没做完饭,儿子线程就等待状态。最后,妈妈终于做完饭了,于是执行 V(s2),s2 信号量从 -1 变回了 0,于是就唤醒等待中的儿子线程,唤醒后,儿子线程就可以进行吃饭了。
生产者-消费者问题

生产者-消费者问题描述:
- 生产者在生成数据后,放在一个缓冲区中;
- 消费者从缓冲区取出数据处理;
- 任何时刻,只能有一个生产者或消费者可以访问缓冲区;
我们对问题分析可以得出:
- 任何时刻只能有一个线程操作缓冲区,说明操作缓冲区是临界代码,需要互斥;
- 缓冲区空时,消费者必须等待生产者生成数据;缓冲区满时,生产者必须等待消费者取出数据。说明生产者和消费者需要同步。
那么我们需要三个信号量,分别是:
- 互斥信号量
mutex:用于互斥访问缓冲区,初始化值为 1; - 资源信号量
fullBuffers:用于消费者询问缓冲区是否有数据,有数据则读取数据,初始化值为 0(表明缓冲区一开始为空); - 资源信号量
emptyBuffers:用于生产者询问缓冲区是否有空位,有空位则生成数据,初始化值为 n(缓冲区大小);
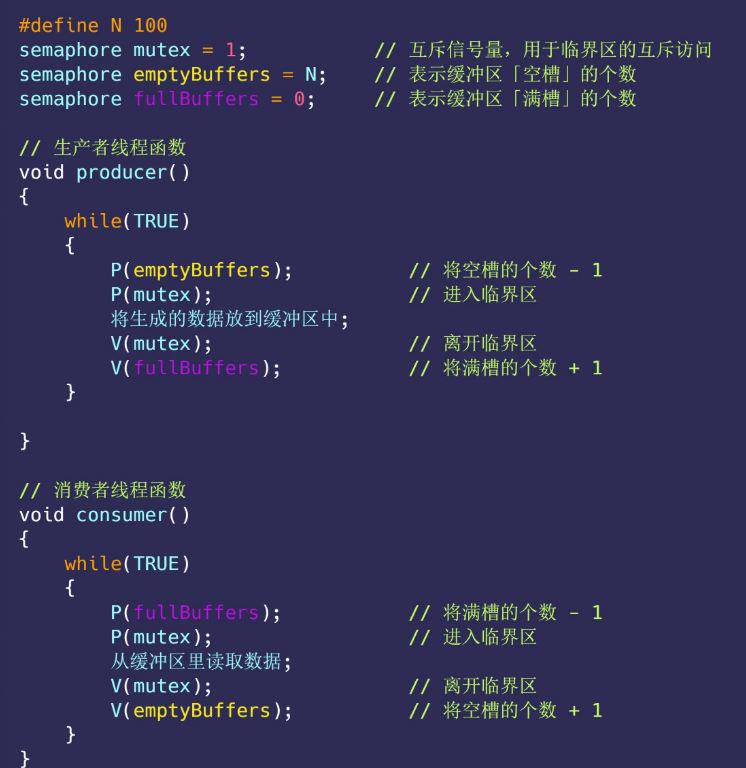
如果消费者线程一开始执行 P(fullBuffers),由于信号量 fullBuffers 初始值为 0,则此时fullBuffers 的值从 0 变为 -1,说明缓冲区里没有数据,消费者只能等待。
接着,轮到生产者执行 P(emptyBuffers),表示减少 1 个空槽,如果当前没有其他生产者线程在临界区执行代码,那么该生产者线程就可以把数据放到缓冲区,放完后,执行 V(fullBuffers) ,信号量fullBuffers 从 -1 变成 0,表明有「消费者」线程正在阻塞等待数据,于是阻塞等待的消费者线程会被唤醒。
消费者线程被唤醒后,如果此时没有其他消费者线程在读数据,那么就可以直接进入临界区,从缓冲区读取数据。最后,离开临界区后,把空槽的个数 + 1。
经典同步问题
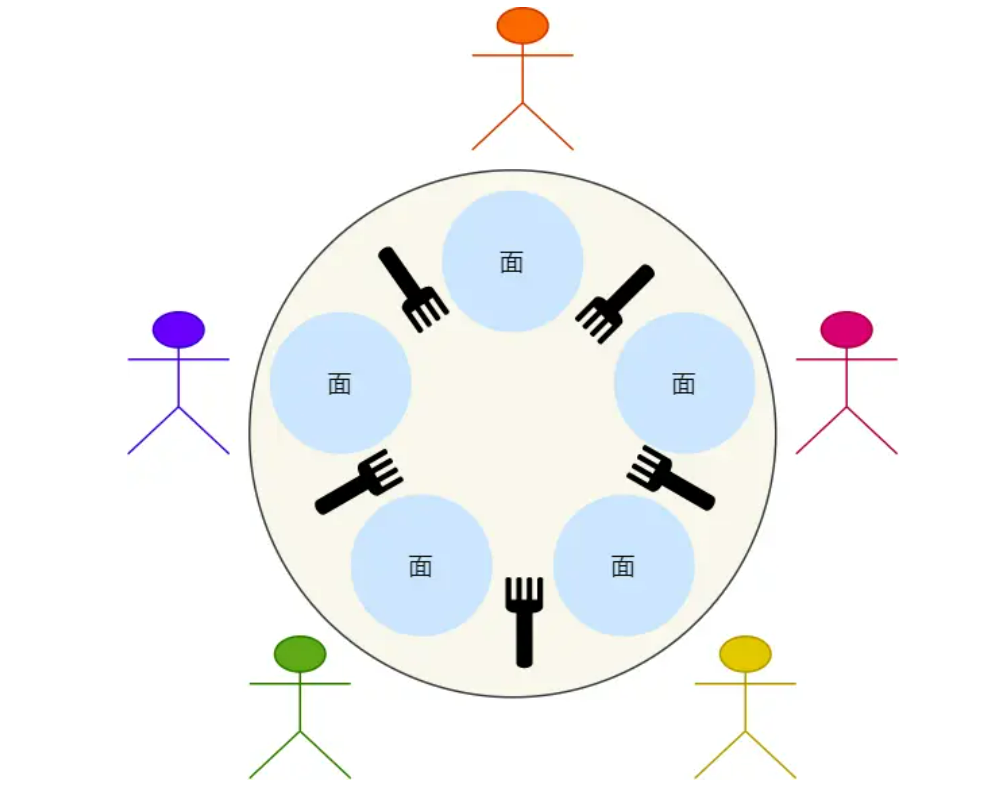
先来看看哲学家就餐的问题描述:
5个老大哥哲学家,闲着没事做,围绕着一张圆桌吃面;- 巧就巧在,这个桌子只有
5支叉子,每两个哲学家之间放一支叉子; - 哲学家围在一起先思考,思考中途饿了就会想进餐;
- 奇葩的是,这些哲学家要两支叉子才愿意吃面,也就是需要拿到左右两边的叉子才进餐;
- 吃完后,会把两支叉子放回原处,继续思考;
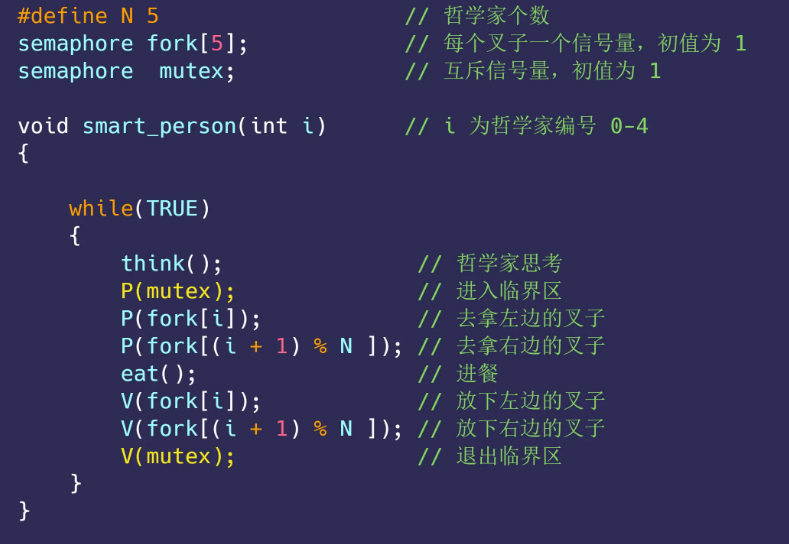
方案一
我们用信号量的方式,也就是 PV 操作来尝试解决它,代码如下: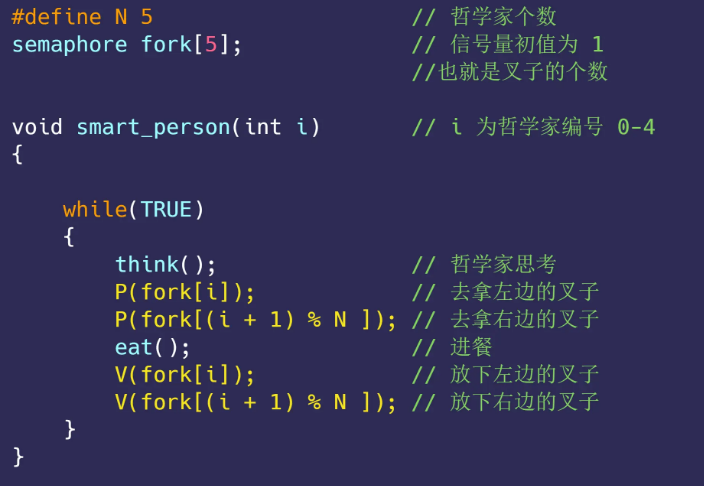
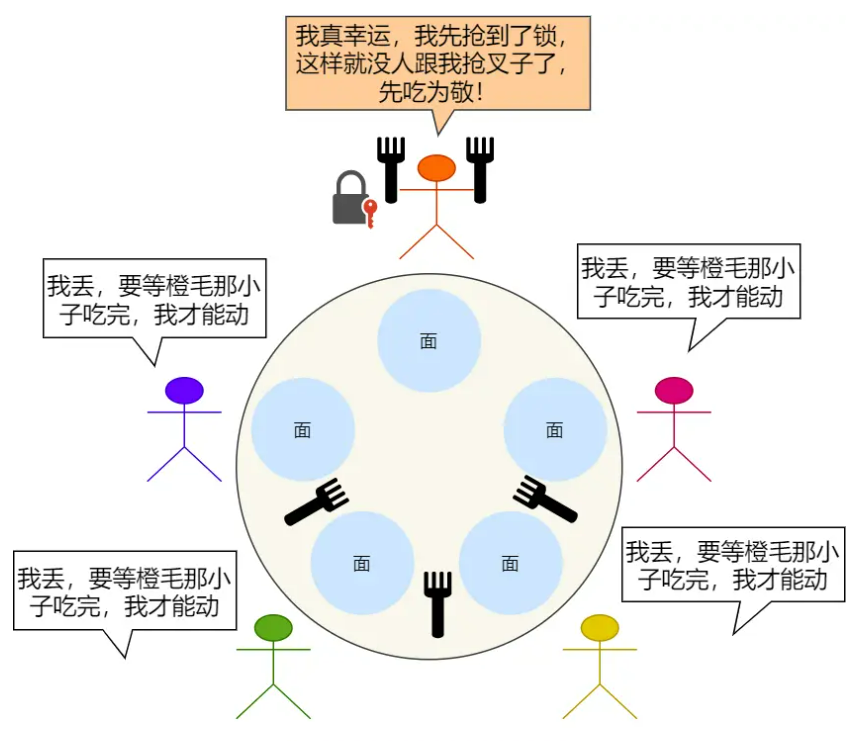
上面的程序,好似很自然。拿起叉子用 P 操作,代表有叉子就直接用,没有叉子时就等待其他哲学家放回叉子。
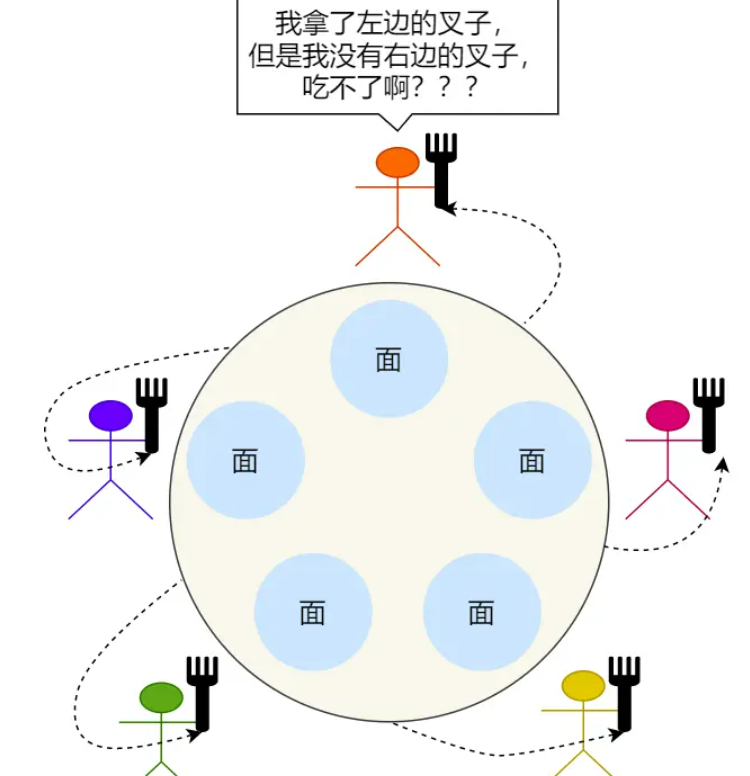
不过,这种解法存在一个极端的问题:假设五位哲学家同时拿起左边的叉子,桌面上就没有叉子了, 这样就没有人能够拿到他们右边的叉子,也就说每一位哲学家都会在 P(fork[(i + 1) % N ]) 这条语句阻塞了,很明显这发生了死锁的现象。
方案二
既然「方案一」会发生同时竞争左边叉子导致死锁的现象,那么我们就在拿叉子前,加个互斥信号量,代码如下:
上面程序中的互斥信号量的作用就在于,只要有一个哲学家进入了「临界区」,也就是准备要拿叉子时,其他哲学家都不能动,只有这位哲学家用完叉子了,才能轮到下一个哲学家进餐。
方案二虽然能让哲学家们按顺序吃饭,但是每次进餐只能有一位哲学家,而桌面上是有 5 把叉子,按道理是能可以有两个哲学家同时进餐的,所以从效率角度上,这不是最好的解决方案。
方案三
那既然方案二使用互斥信号量,会导致只能允许一个哲学家就餐,那么我们就不用它。
另外,方案一的问题在于,会出现所有哲学家同时拿左边刀叉的可能性,那我们就避免哲学家可以同时拿左边的刀叉,采用分支结构,根据哲学家的编号的不同,而采取不同的动作。
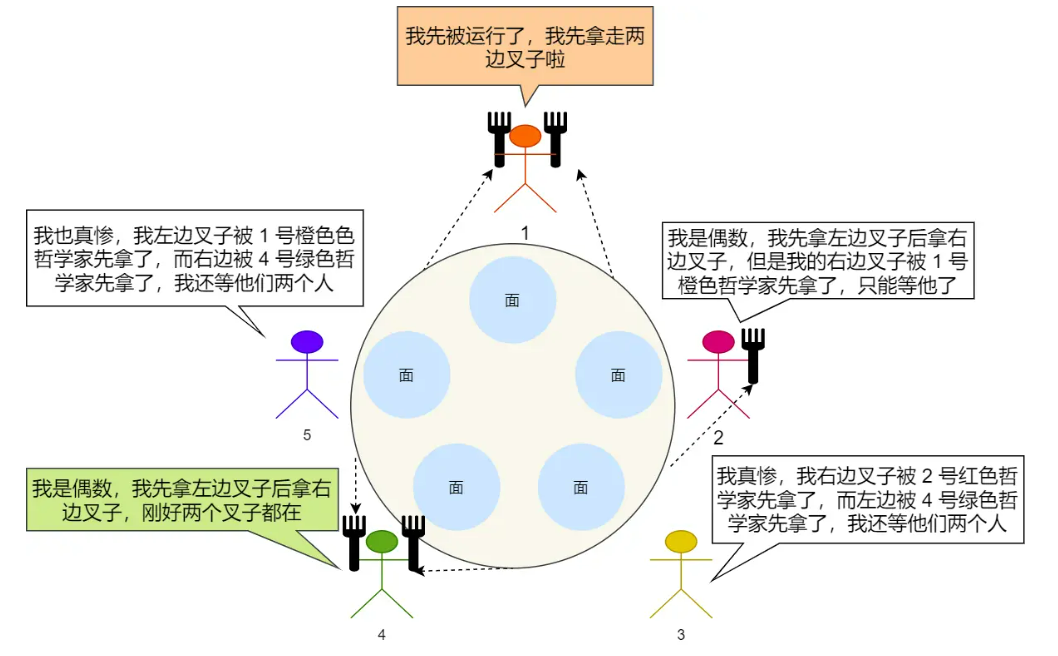
即让偶数编号的哲学家「先拿左边的叉子后拿右边的叉子」,奇数编号的哲学家「先拿右边的叉子后拿左边的叉子」。
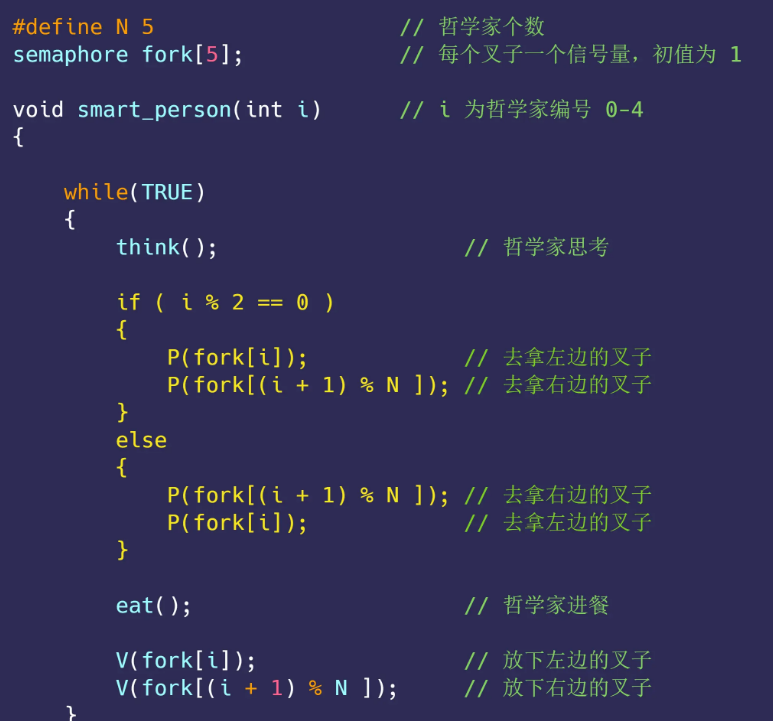
上面的程序,在 P 操作时,根据哲学家的编号不同,拿起左右两边叉子的顺序不同。另外,V 操作是不需要分支的,因为 V 操作是不会阻塞的。
方案四
在这里再提出另外一种可行的解决方案,我们用一个数组 state 来记录每一位哲学家的三个状态,分别是在进餐状态、思考状态、饥饿状态(正在试图拿叉子)。
那么,一个哲学家只有在两个邻居都没有进餐时,才可以进入进餐状态。
第 i 个哲学家的左邻右舍,则由宏 LEFT 和 RIGHT 定义:
- LEFT : ( i + 5 - 1 ) % 5
- RIGHT : ( i + 1 ) % 5
具体代码实现如下:
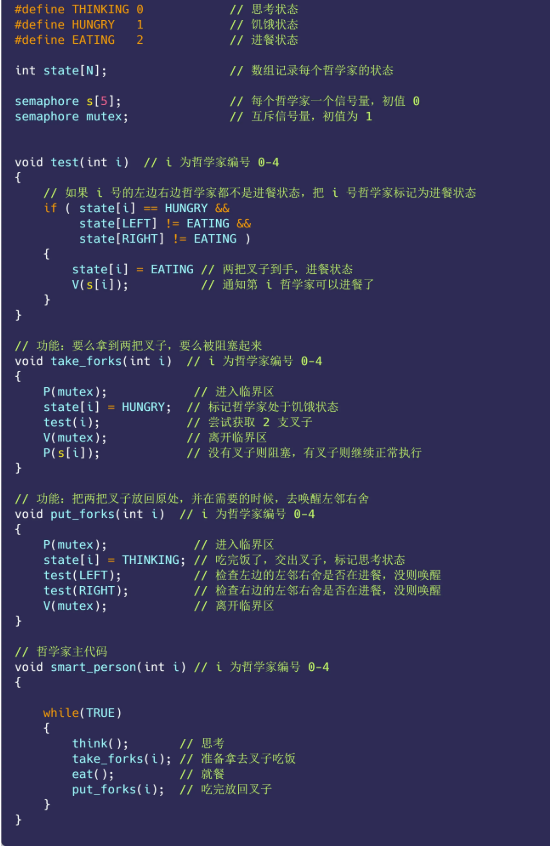
上面的程序使用了一个信号量数组,每个信号量对应一位哲学家,这样在所需的叉子被占用时,想进餐的哲学家就被阻塞。
注意,每个进程/线程将 smart_person 函数作为主代码运行,而其他 take_forks、put_forks 和test 只是普通的函数,而非单独的进程/线程。
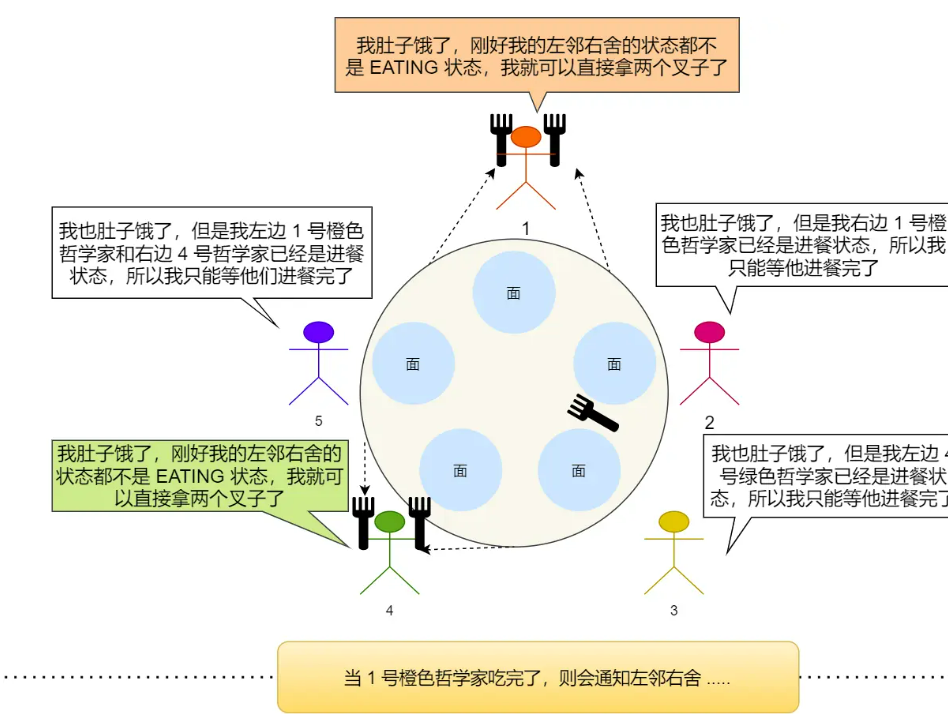
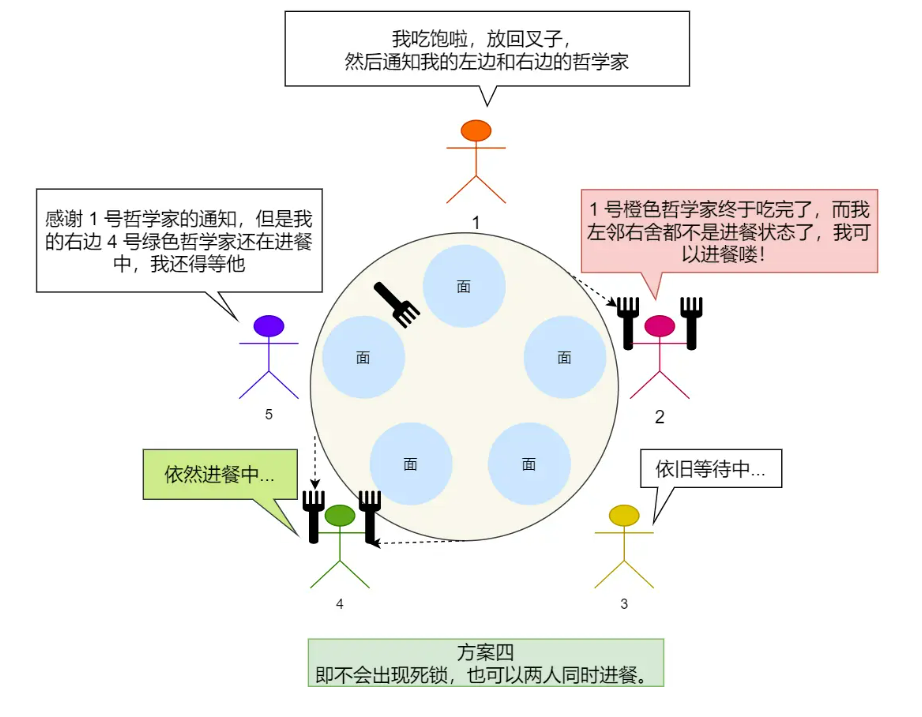
方案四同样不会出现死锁,也可以两人同时进餐。
读者-写者问题
前面的「哲学家进餐问题」对于互斥访问有限的竞争问题(如 I/O 设备)一类的建模过程十分有用。
另外,还有个著名的问题是「读者-写者」,它为数据库访问建立了一个模型。
读者只会读取数据,不会修改数据,而写者即可以读也可以修改数据。
读者-写者的问题描述:
- 「读-读」允许:同一时刻,允许多个读者同时读
- 「读-写」互斥:没有写者时读者才能读,没有读者时写者才能写
- 「写-写」互斥:没有其他写者时,写者才能写
方案一
使用信号量的方式来尝试解决:
- 信号量
wMutex:控制写操作的互斥信号量,初始值为 1 ; - 读者计数
rCount:正在进行读操作的读者个数,初始化为 0; - 信号量
rCountMutex:控制对 rCount 读者计数器的互斥修改,初始值为 1;
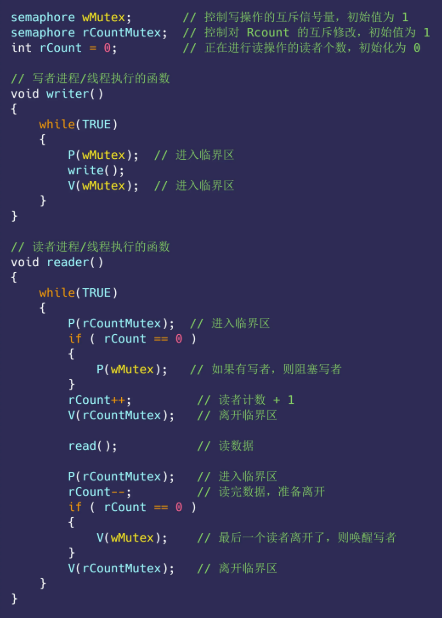
上面的这种实现,是读者优先的策略,因为只要有读者正在读的状态,后来的读者都可以直接进入,如果读者持续不断进入,则写者会处于饥饿状态。
方案二
那既然有读者优先策略,自然也有写者优先策略:
- 只要有写者准备要写入,写者应尽快执行写操作,后来的读者就必须阻塞;
- 如果有写者持续不断写入,则读者就处于饥饿;
在方案一的基础上新增如下变量
- 信号量
rMutex:控制读者进入的互斥信号量,初始值为 1; - 信号量
wDataMutex:控制写者写操作的互斥信号量,初始值为 1; - 写者计数
wCount:记录写者数量,初始值为 0; - 信号量
wCountMutex:控制 wCount 互斥修改,初始值为 1;
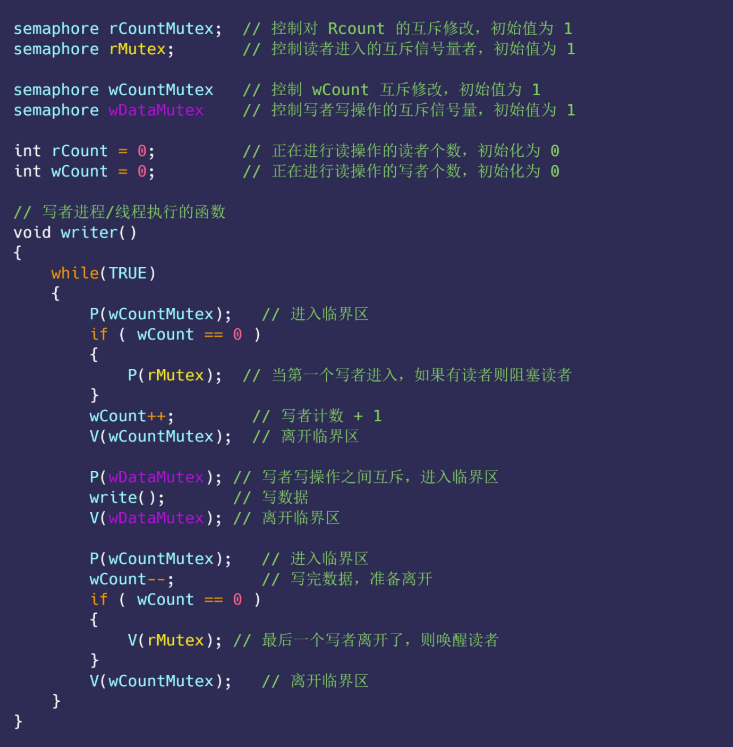
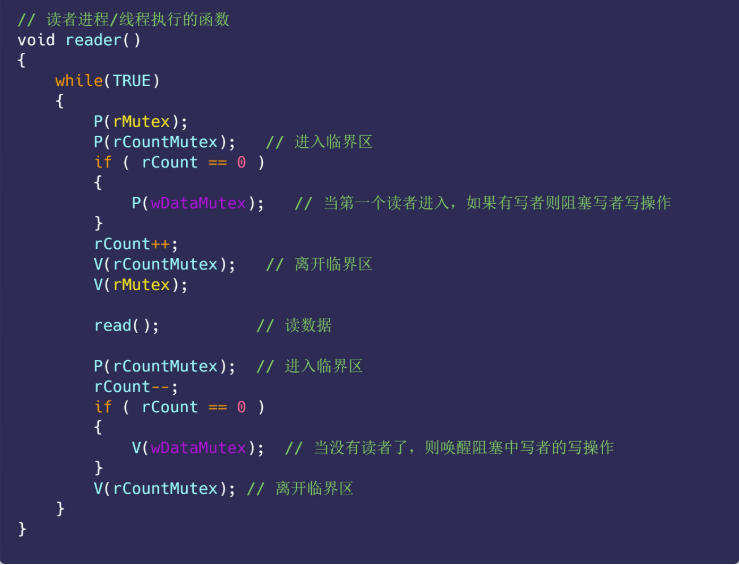
注意,这里 rMutex 的作用,开始有多个读者读数据,它们全部进入读者队列,此时来了一个写者,执行了 P(rMutex) 之后,后续的读者由于阻塞在 rMutex 上,都不能再进入读者队列,而写者到来,则可以全部进入写者队列,因此保证了写者优先。
同时,第一个写者执行了 P(rMutex) 之后,也不能马上开始写,必须等到所有进入读者队列的读者都执行完读操作,通过 V(wDataMutex) 唤醒写者的写操作。
方案三
既然读者优先策略和写者优先策略都会造成饥饿的现象,那么我们就来实现一下公平策略。
公平策略:
- 优先级相同;
- 写者、读者互斥访问;
- 只能一个写者访问临界区;
- 可以有多个读者同时访问临界资源;
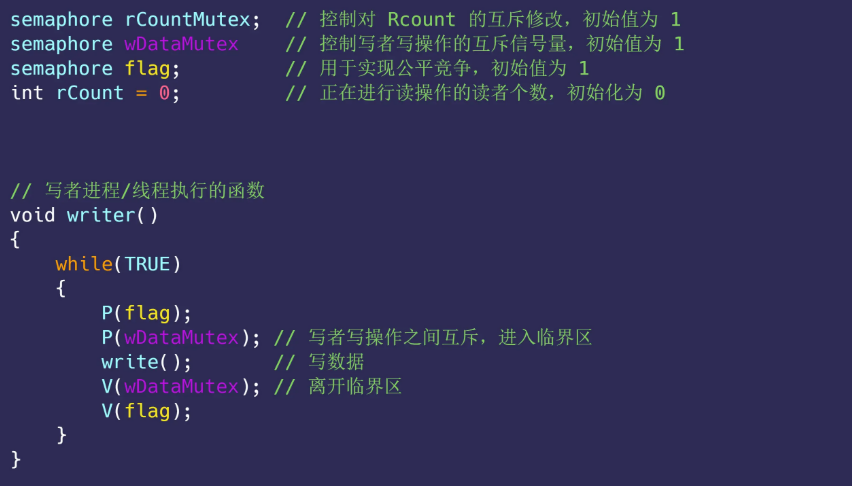
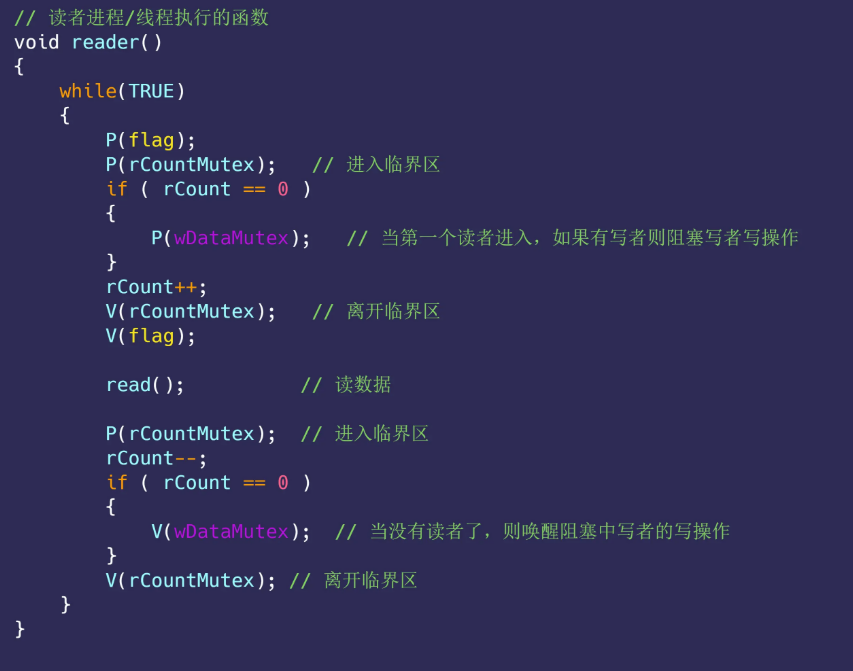
开始来了一些读者读数据,它们全部进入读者队列,此时来了一个写者,执行 P(falg) 操作,使得后续到来的读者都阻塞在 flag 上,不能进入读者队列,这会使得读者队列逐渐为空,即 rCount 减为 0。这个写者也不能立马开始写(因为此时读者队列不为空),会阻塞在信号量 wDataMutex 上,读者队列中的读者全部读取结束后,最后一个读者进程执行 V(wDataMutex),唤醒刚才的写者,写者则继续开始进行写操作。











、Rancher 和 Podman 的异同点分析)







