摘 要
在现在工业自动化高度发展的时期,几乎所有的工业设备都离不开旋转设备,形形色色的电机在不同领域发挥着很重要的作用。不同场合对电机控制要求是不同的,但大部分都会涉及到旋转设备的转速测量,从而利用转速来实施对旋转设备的控制。很多工程实践中也经常会遇到各种需要测量转速的场合,例如在发动机、电动机、机床主轴等旋转设备的实验运转和控制中,常需要分时或连续测量,显示其转速及瞬间速度。为满足工业生产中对电机、中小型马达、机床转轴等旋转设备的转速系统控制和转速采集上的需求,本文设计了一种成本低、功耗低、可靠性高的直流电机测速系统,AT89C51是ATMEL公司的一种高效Flash单片机,它为很多嵌入式控制系统提供了一种灵活性高且价廉的方案,所以整个系统以AT80C51单片机为核心,利用霍尔元件测速法测其转速。利用proteus再配合Keil联合仿真,模拟实现直流电机对于速度的测定和做到可以调节直流电机的正转、反转、加速、减速等控制。此系统具有操作简单、使用方便、精度高等优点,有一定的实用价值。
关键词:直流电机;转速测量;单片机
2系统设计
2.1 系统分析
系统主要构成包括:电源系统、输入系统、核心芯片、输出系统。
(1)电源系统:把标准的220V电源转化成稳定的直流+5V电源的任务,包含变压、整流、滤波和稳压四部分。
(2)输入系统:由键盘,霍尔传感器构成。键盘获取按键信息,单片机接收信息并进行运算。
(3)核心芯片:采用AT89C51,主要负责接收来自于键盘和霍尔传感器的信号,处理运算后通过引脚来控制其它芯片,从而达到驱动直流电机的目的,同时单片机将处理完成的信息传输出去。
(4)输出系统:由L298及其控制的直流电机和LCD显示器组成。L298负责接收单片机的信号从而实现直流电机启动、停止、加速、减速、正转、反转的功能;LCD则通过接收单片机输出的信号来显示直流电机转速。
2.2 主要元件
2.2.1 AT89C51芯片
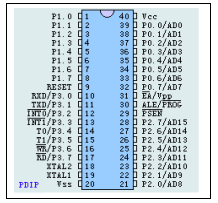
图2-1
3电路设计
3.1 宏观架构
整个直流电机测速系统原理方框图如图 2-1 所示,本系统由五部分组成,单片机是系统的核心,外围电路有转速测定电路、 显示电路、电机驱动电路、键盘电路。如图3-1:
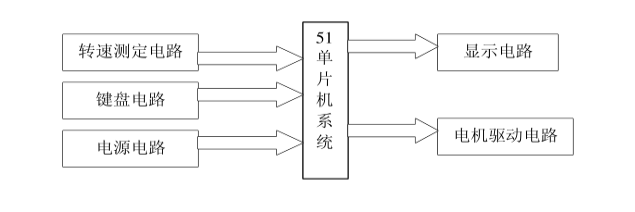
图3-1 结构框图
3.2 电机驱动
电机驱动部分由单片机通过 P1.0 口输出 PWM 脉冲, 驱动专用芯片 L298, 实现直流电机正转、 反转、 加速、 减速这些功能。在电动机驱动信号方面, 我们采用了占空比可调的周期矩形信号控制。 脉冲频率对电动机转速有影响, 脉冲频率高, 连续性好。 电机 PWM 驱动模块的电路设计与实现具体电路见图 3-2。
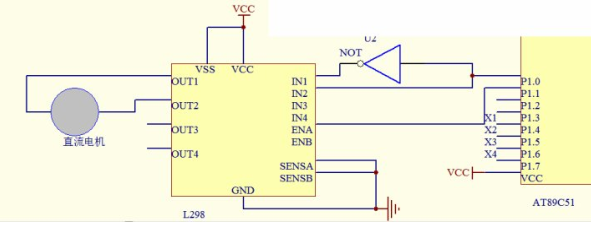
图3-2 电机驱动原理图
3.3 键盘控制
键盘模块把输入信号输入到单片机的 P1, P3 口, 经单片机处理从而实现对直流电机的正转、 反转、 加速、 减速的控制。如图3-3、3-4:
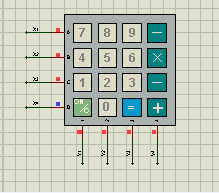
图3-3 键盘输入
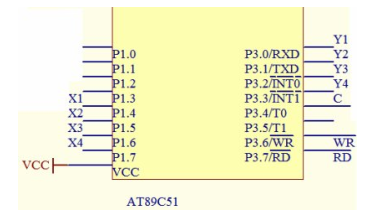
图3-4 键盘接单片机连线图
3.4 传感器
霍尔传感器通过对齿轮齿的计数, 3010T 把计数的内容传给单片机的 T0 脚,用定时器 T1 每 50ms 产生一个中断来达到计算直流电机速度的目的。其位置如图3-5所示:
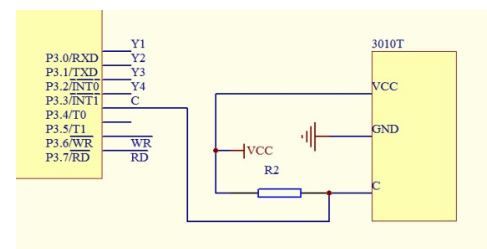
图3-5 传感器与单片机接线图
4 电路系统仿真
4.1 主程序
主程序流程图展现了整个系统工作的过程以及先后次序, 相关联系。 开始程序初始化
后, 单片机接收键盘的信号驱动直流电机。 霍尔传感器测速后, 经单片机处理后由液晶显
示器显示转速的数值和旋转的方向。如图4-1所示:
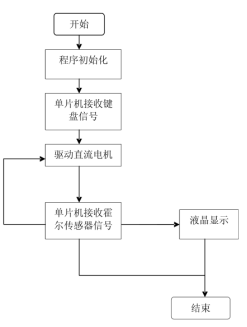图4-1 主程序流程图
4.2 直流电机测速系统
4.2.1 其直流电机测速系统仿真电路图4-2:
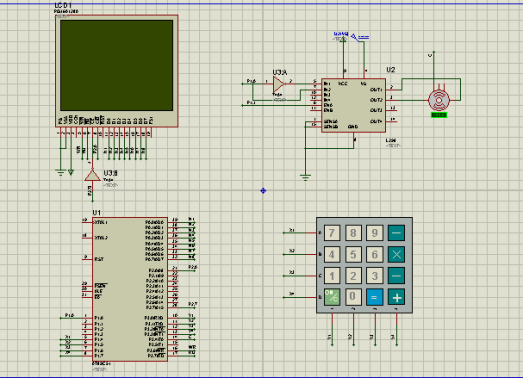
图4-2 测速系统仿真电路图
4.2.2 正转
原理: 当引脚 IN1 为高电平, IN2 位低电平, ENA 为高电平时, 流经电机的电流为顺时针, 所以直流电机正转。其仿真接线图和结果如图4-3、4-4 所示:
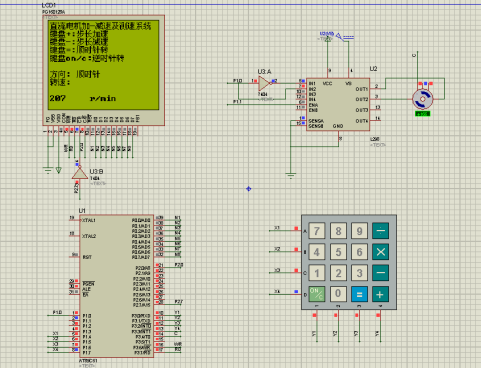
图4-3 电机正转电路
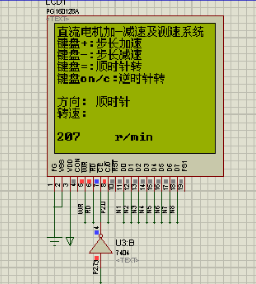
图4-4 正转仿真结果
文章底部可以获取博主的联系方式,获取源码、查看详细的视频演示,或者了解其他版本的信息。
所有项目都经过了严格的测试和完善。对于本系统,我们提供全方位的支持,包括修改时间和标题,以及完整的安装、部署、运行和调试服务,确保系统能在你的电脑上顺利运行。

)





——物物而不物于物,念念而不念于念。(数据库到此结束!祝世间美好与各位不期而遇,善意常伴汝身!))

)





)


与运行环境(JRE/JDK)不一致时的常见 Java 错误及解决方案)
![[JS逆向] 微信小程序逆向工程实战](http://pic.xiahunao.cn/[JS逆向] 微信小程序逆向工程实战)