无人机在复杂地形与危险环境中的自主路径规划是保障任务顺利执行的关键问题。本文针对山地环境下单无人机三维路径规划难题,提出了一种基于粒子群算法(PSO)的优化方法。首先,建立了包含真实地形高程、危险区域和飞行约束条件的三维环境模型;其次,将无人机飞行路径编码为导航点序列,并设计了综合目标函数,综合考虑了路径长度、飞行高度偏差和平滑性,同时通过惩罚函数处理危险区域和安全高度约束;最后,利用改进的粒子群算法搜索最优路径,并引入变异算子与模拟退火机制增强算法的全局寻优能力。实验结果表明,该方法能够在较少迭代次数内快速收敛,得到的路径不仅能有效避开危险区域和复杂地形,而且在长度与平滑性上表现优良,验证了所提方法在无人机三维路径规划问题上的有效性和可行性。
作者:张家梁(自研改进)
引言
近年来,无人机(Unmanned Aerial Vehicle, UAV)因其灵活机动、成本低廉等优势,在军事侦察、灾害监测、环境探测和物流运输等领域得到广泛应用。然而,在复杂山地环境和存在危险区域的场景中,无人机的自主路径规划问题仍面临巨大挑战。一方面,三维地形起伏剧烈、障碍物和危险区域分布复杂,使得路径规划不仅需要保证安全性,还需兼顾飞行距离与能耗;另一方面,传统的确定性规划方法在高维搜索空间中易陷入局部最优,难以满足实时性和全局优化的双重要求。
智能优化算法因其全局搜索能力和鲁棒性,成为解决无人机路径规划的重要研究方向。其中,粒子群算法(Particle Swarm Optimization, PSO)以其简单易实现、收敛速度快的特点,在路径规划问题上表现突出。但标准 PSO 容易早熟收敛,导致所得路径质量有限。为此,本文提出了一种改进的 PSO 方法,将无人机路径编码为导航点序列,在综合考虑路径长度、飞行高度与平滑性的目标函数基础上,引入危险区域和安全高度约束,并通过变异算子与模拟退火机制提升搜索多样性与跳出局部最优的能力。
本文的主要贡献包括:
(1)构建了包含地形高程、危险区与飞行约束的三维无人机路径规划模型;
(2)设计了综合代价函数,实现了路径长度、飞行高度与平滑度的多目标统一度量;
(3)提出了改进的 PSO 优化框架,有效提升了全局寻优性能;
(4)通过实验验证了所提方法在复杂环境下的有效性和优越性。
系统架构
1.系统概述
本系统旨在为单无人机在复杂山地环境和危险区域约束条件下提供安全、可行且高效的三维路径规划方案。系统采用改进的粒子群算法作为核心优化引擎,将路径规划问题转化为搜索空间中的全局优化问题,并通过综合目标函数对路径进行评价和选择。
系统整体架构由以下几个部分组成:
环境建模模块
(1)输入真实地形数据(高程网格)、起点与终点位置。
(2)定义危险区域(如禁飞区、障碍物位置与半径)以及飞行安全高度约束。
(3)输出三维飞行环境模型,为后续路径规划提供基础。
路径编码与解码模块
(1)将无人机飞行路径表示为若干导航点,并用归一化向量进行编码。
(2)在代价计算过程中,将归一化解码为实际三维坐标,并进行边界修正。
目标函数与约束处理模块
(1)综合考虑路径长度、飞行高度波动和平滑性,构建多目标加权代价函数。
(2)对进入危险区或低于安全高度的路径加以惩罚,确保可行性。
优化求解模块(粒子群算法)
(1)初始化粒子群位置与速度,迭代更新个体和群体最优解。
(2)引入变异算子和模拟退火机制,增强全局搜索能力,避免早熟收敛。
结果输出与可视化模块
(1)输出最优路径及对应代价指标。
(2)提供三维视角、俯视图和等高线图等多种可视化方式。
(3)绘制收敛曲线,展示算法性能。
通过上述模块的协同工作,系统能够在复杂三维环境下快速生成符合安全与性能要求的无人机飞行路径,既保证了避障和安全性,又兼顾了路径的长度与平滑度,从而为无人机在危险区域执行任务提供有效支持。
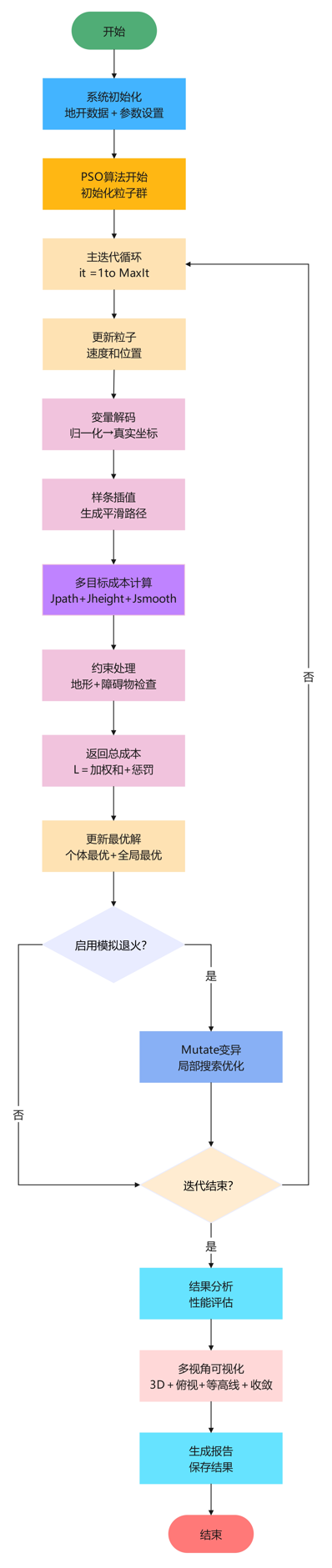
2.系统流程图
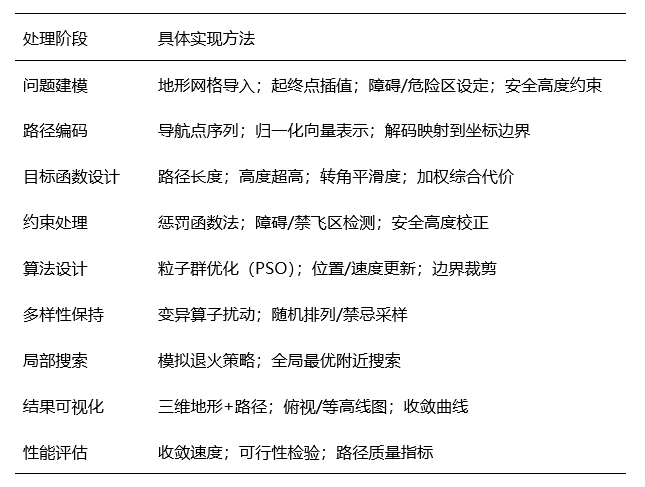
研究方法
研究方法: 本文通过建立包含地形与危险区约束的三维环境模型,设计综合目标函数,并采用改进粒子群算法搜索无人机的最优飞行路径。
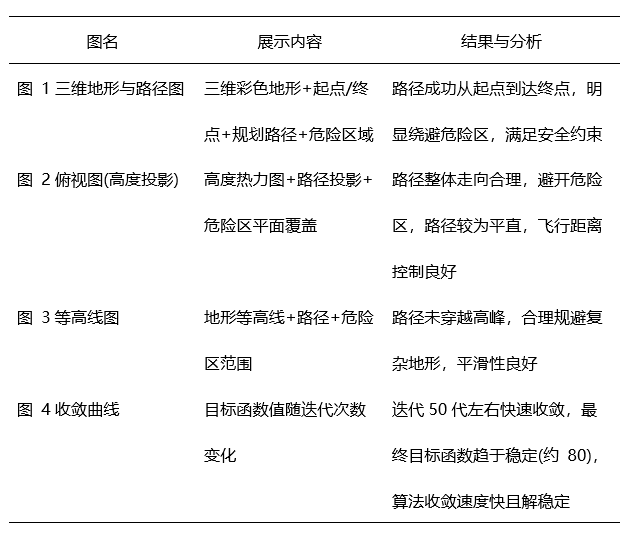
实验结果
实验结果表明: 基于粒子群算法的无人机三维路径规划方法在复杂山地环境和危险区域约束条件下能够快速收敛,并在较少迭代次数内获得稳定解。规划得到的路径能够有效避开危险区和地形高峰,满足安全高度要求,整体飞行距离较为合理,同时在平滑性方面表现良好,转角变化较小,具有较好的可飞行性。收敛曲线显示目标函数在约 50 代后趋于稳定,进一步验证了该算法在无人机路径规划问题上的收敛效率与稳定性。
运行runpso.m
图1:无人机三维路径规划地形图
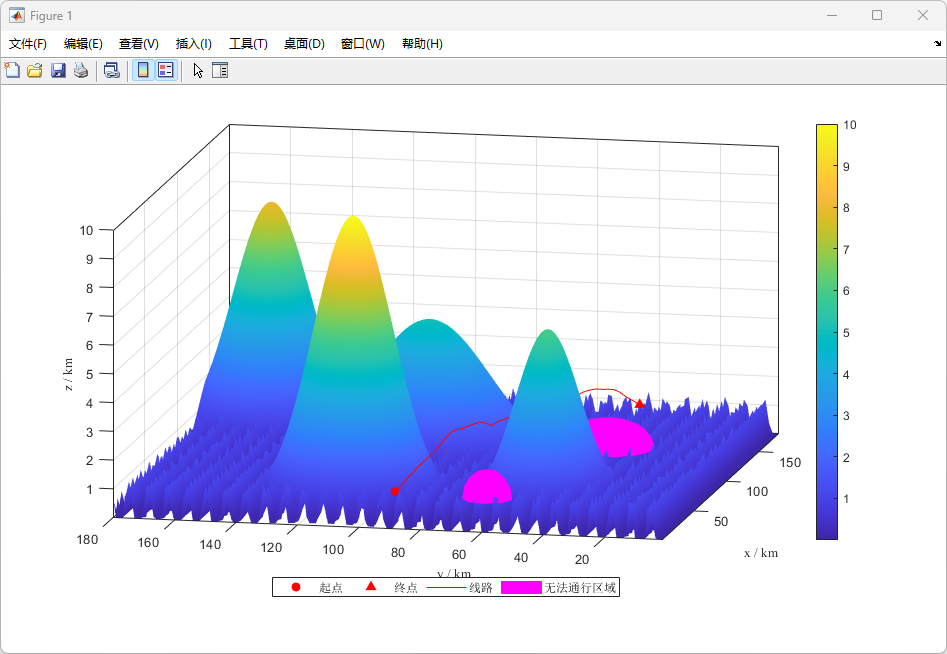
图意:展示三维地形表面(彩色高程图),起点(红圆点)、终点(红三角)、规划路径(红线),以及危险区域(紫色半透明体)。
分析:算法在复杂地形与危险区约束下给出一条可行路径,能有效避开“无法通行区域”,说明 PSO 优化出的路径满足基本安全约束。
图2:无人机路径规划俯视图(高度图投影)
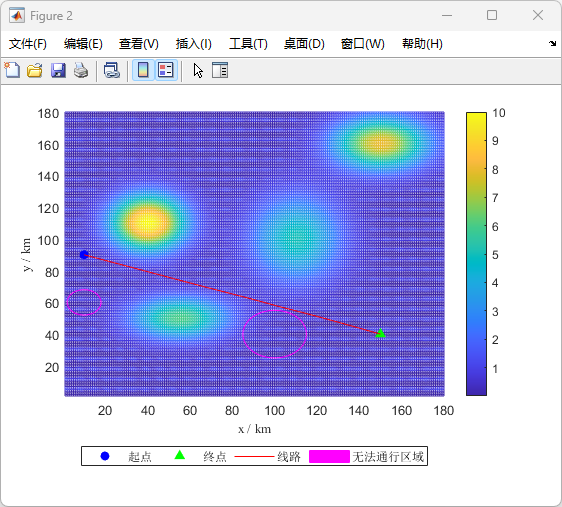
图意:二维平面视角下的高度分布(彩色表示地形高度),路径红线为规划结果,起终点分别用蓝色圆点和绿色三角表示,危险区在平面上以紫色圆形覆盖。
分析:路径在平面上清晰地绕过了危险区域,保持整体方向性较好,说明优化兼顾了避障与飞行距离。
图3:无人机路径规划等高线图
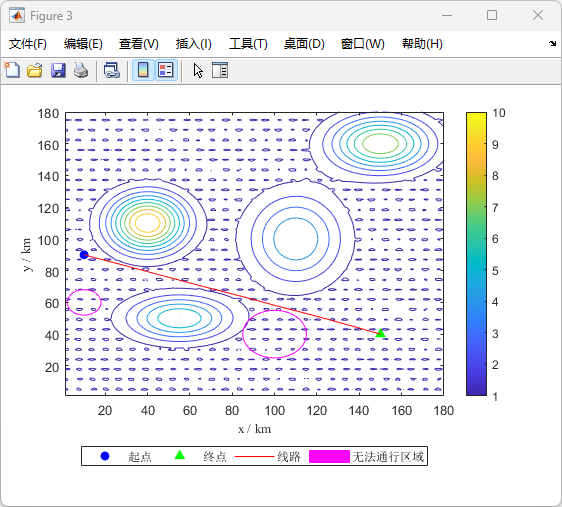
图意:等高线表示地形起伏,路径与起终点同样标记,危险区显示为紫色圈。
分析:通过等高线能更直观地看到路径绕避地形高峰与障碍区的方式,进一步验证路径可行性与合理性。
图5:目标函数收敛曲线
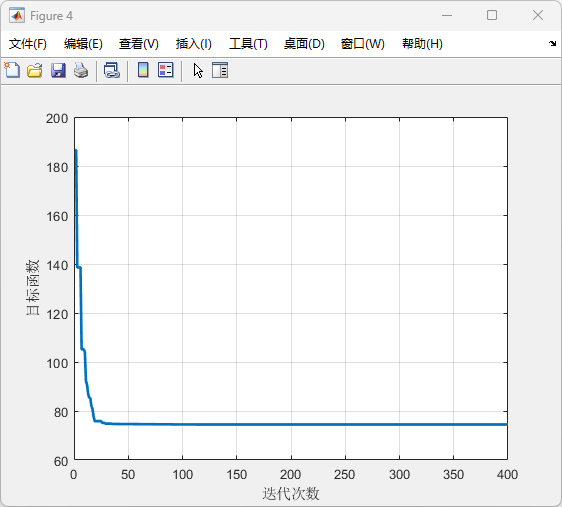
图意:纵轴为目标函数值(综合代价),横轴为迭代次数。
分析:曲线在前几十代快速下降,随后趋于平稳,表明粒子群算法在约 50 代后已找到较优解,收敛速度较快且稳定。
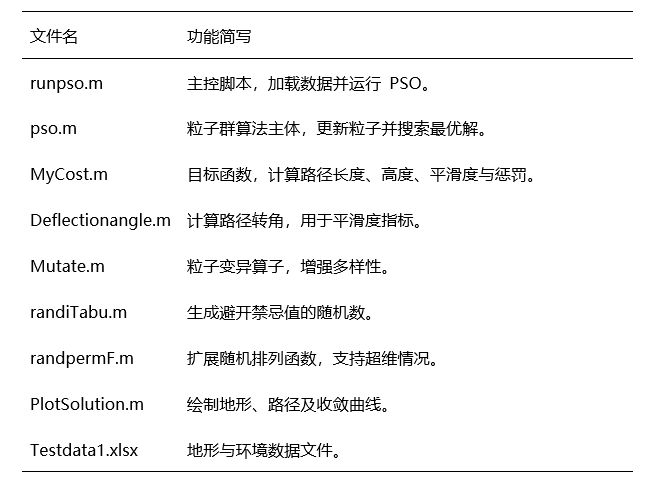
系统实现
本系统完全基于MATLAB平台开发,主要集成以下脚本与模块:
研究结论
本文针对单无人机在复杂山地环境和危险区域约束条件下的三维路径规划问题,提出了一种基于改进粒子群算法的求解方法。通过建立包含地形高程、危险区与飞行约束的三维环境模型,并设计综合考虑路径长度、飞行高度与平滑性的目标函数,结合惩罚函数实现对危险区与安全高度的约束处理,系统能够有效生成可行路径。实验结果表明,该方法在较少迭代次数内即可收敛到稳定解,所得到的飞行路径不仅能有效避开危险区域和复杂地形,还在路径长度与平滑性方面表现优良,验证了改进粒子群算法在无人机三维路径规划问题中的有效性和实用价值。
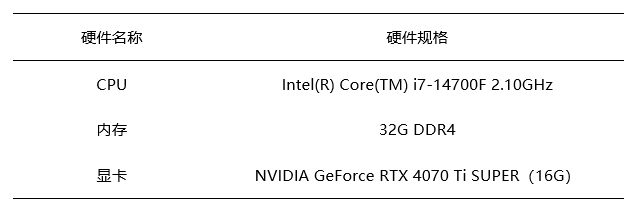
实验环境
硬件配置如表:实验所用硬件平台为惠普(HP)暗影精灵10台式机整机,运行 Windows 11 64 位操作系统,作为模型训练与测试的主要计算平台,能够良好支持Matlab的开发需求。
官方声明
实验环境真实性与合规性声明:
本研究所使用的硬件与软件环境均为真实可复现的配置,未采用虚构实验平台或虚拟模拟环境。实验平台为作者自主购买的惠普(HP)暗影精灵 10 台式整机,具体硬件参数详见表。软件环境涵盖操作系统、开发工具、深度学习框架、MATLAB工具等,具体配置详见表,所有软件组件均来源于官方渠道或开源社区,并按照其许可协议合法安装与使用。
研究过程中严格遵循学术诚信和实验可复现性要求,确保所有实验数据、训练过程与结果均可在相同环境下被重复验证,符合科研规范与工程实践标准。
版权声明:
本算法改进中涉及的文字、图片、表格、程序代码及实验数据,除特别注明外,均由7zcode.张家梁独立完成。未经7zcode官方书面许可,任何单位或个人不得擅自复制、传播、修改、转发或用于商业用途。如需引用本研究内容,请遵循学术规范,注明出处,并不得歪曲或误用相关结论。
本研究所使用的第三方开源工具、框架及数据资源均已在文中明确标注,并严格遵守其相应的开源许可协议。使用过程中无违反知识产权相关法规,且全部用于非商业性学术研究用途。





)


)
-部署和使用指南)









