参考这位大佬:https://zhuanlan.zhihu.com/p/458000359
一. 基本的投影模型
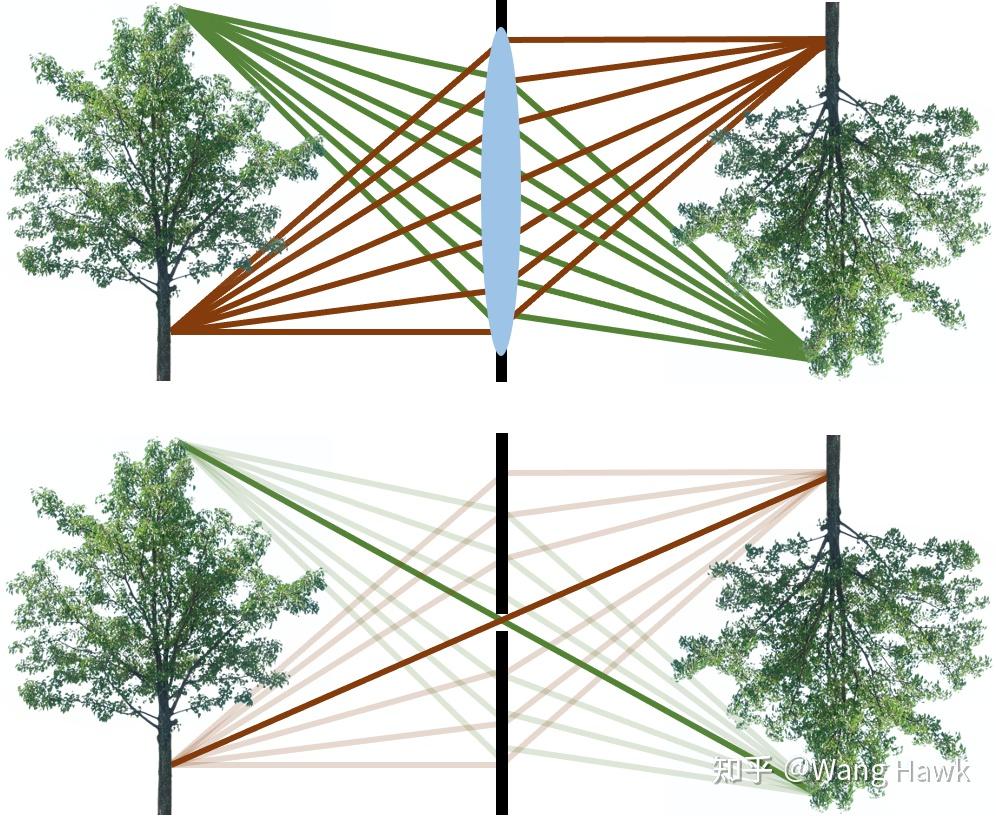
正如上面所说,相机是一个将三维物体投影为二维图像的设备。
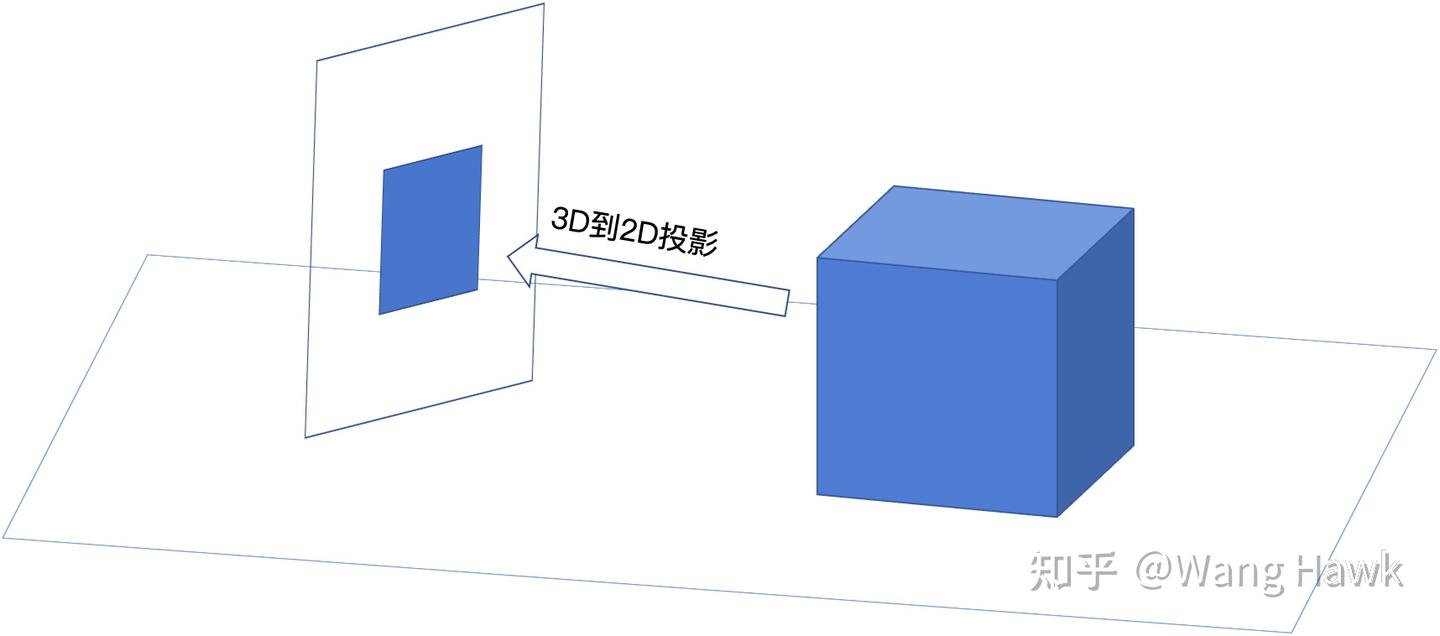
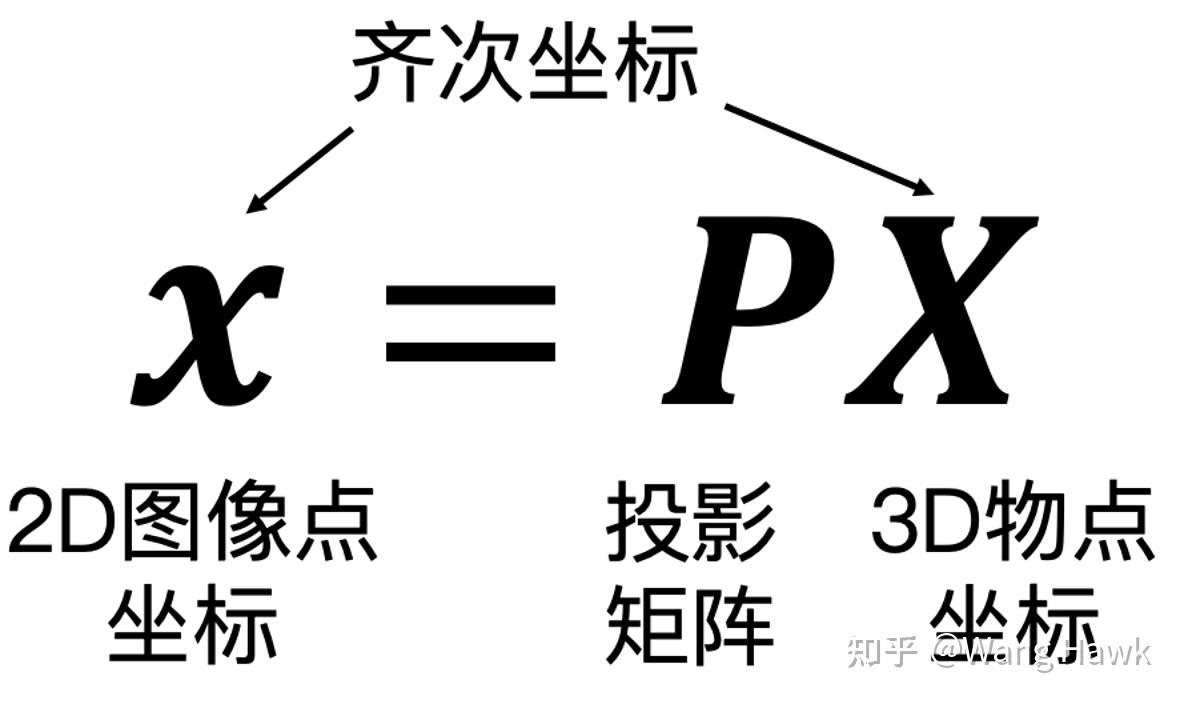
对于小孔相机,或者薄透镜相机来说,基础投影的数学模型可以表达为
我们把这个过程表达在笛卡尔坐标系中,是这样的:
对这个模型,有几个点需要注意:
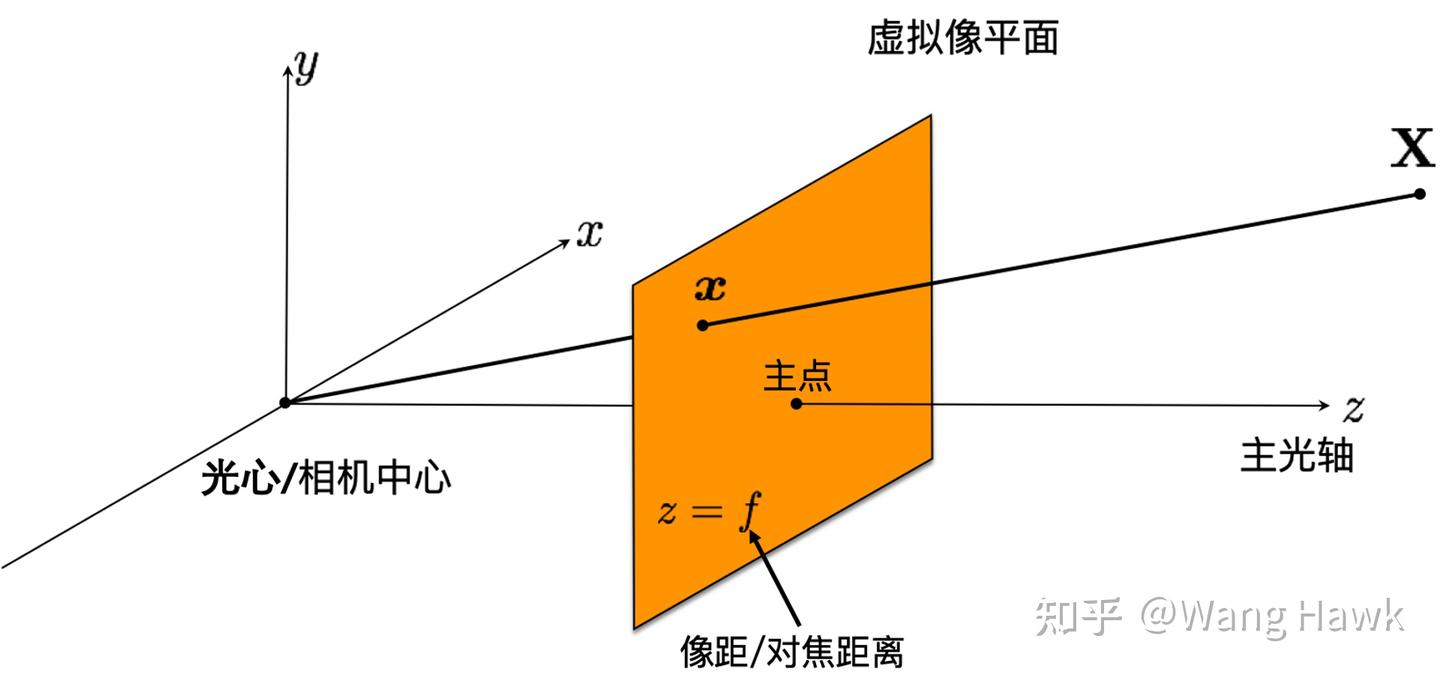
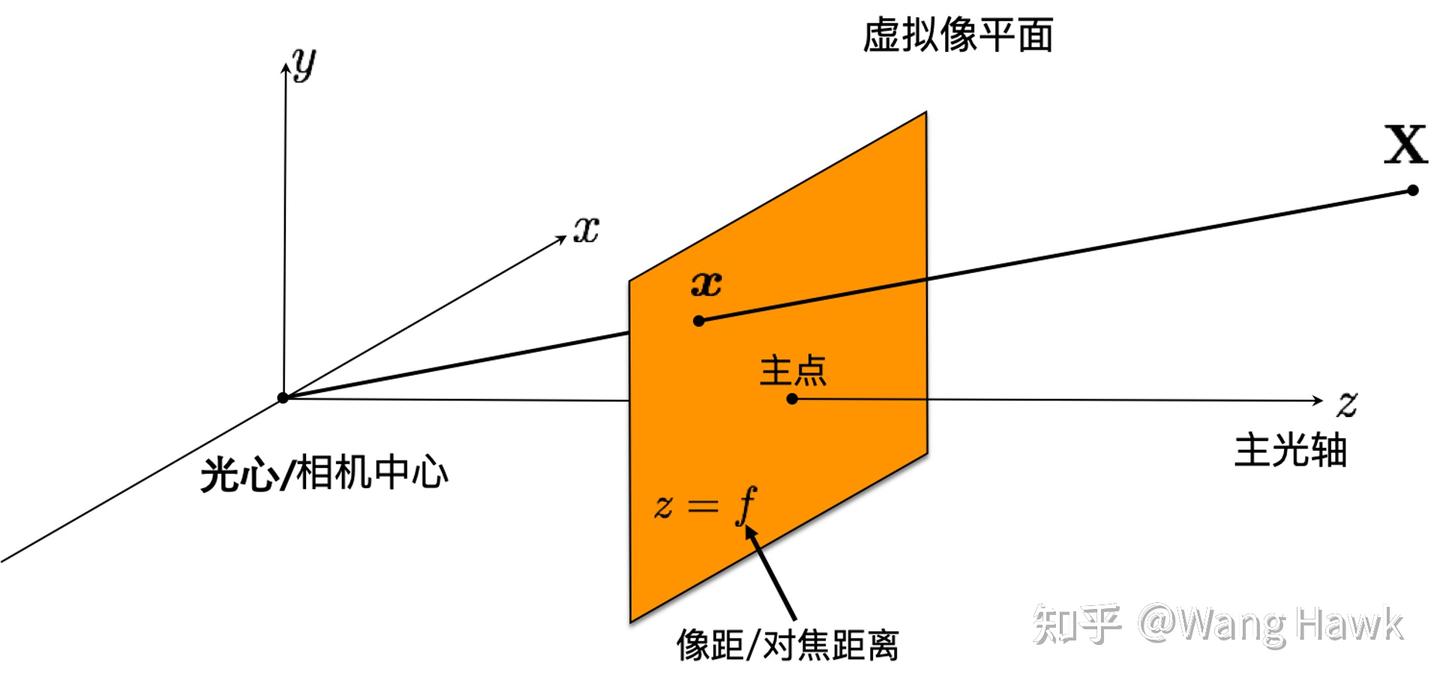
第1, 为了数学计算的方便,将像平面移到了相机之前,如下图所示
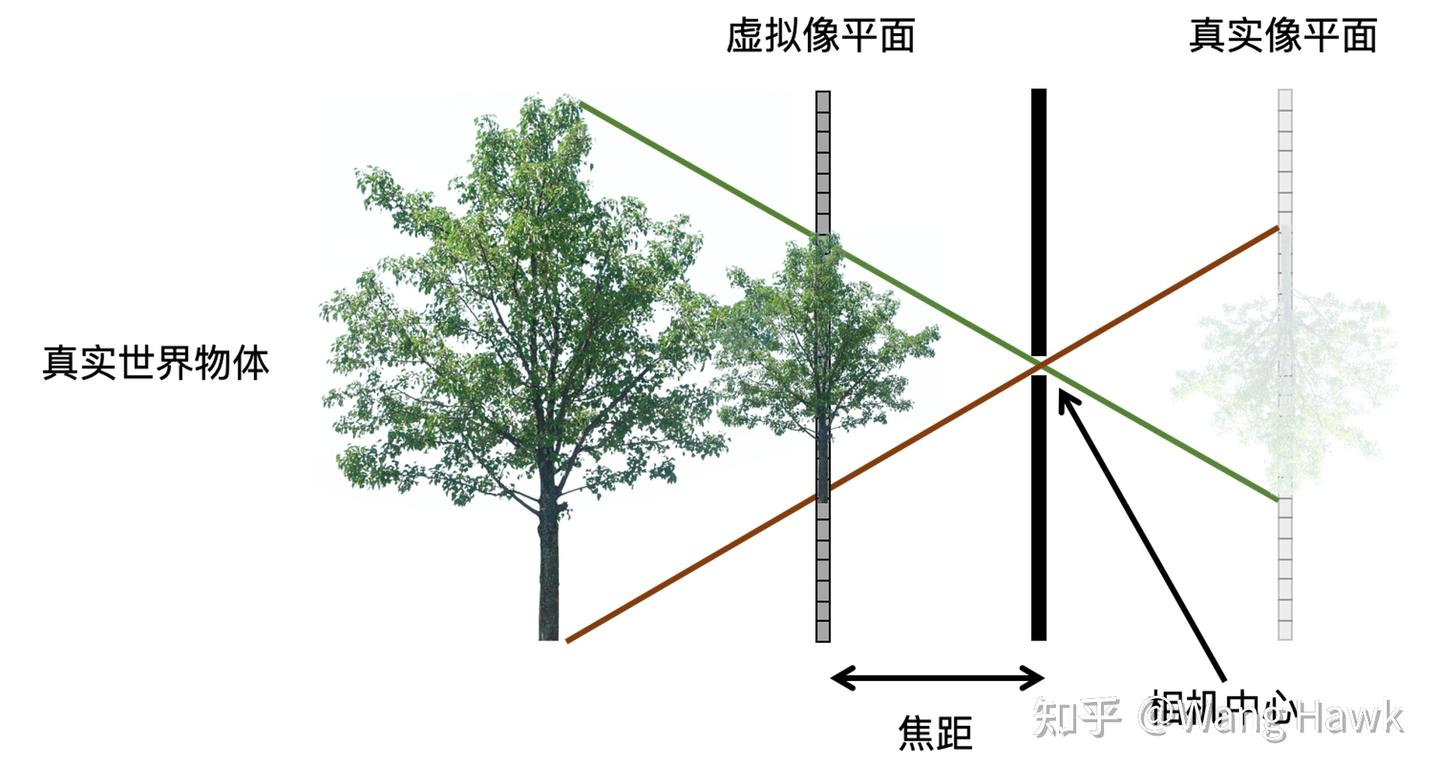
第2,薄透镜成像模型中,假设了对焦距离和对应小孔相机的焦距一致
你在文献里面可能经常会看到focal length, focus distance等等概念,有时候会比较让人混淆。这里需要说明薄透镜成像模型的一些假设:
- 薄透镜成像时,通常只考虑了接近光轴的光线
- 薄透镜成像时,假设像距和对应的小孔相机的焦距一致
- 我们上图中的f,是指对焦距离,即清晰成像的像距(传感器到镜头间的距离)。而并非透镜的焦距。
第3,这里采用了齐次坐标
现在我们来谈谈点的坐标变换,以及齐次坐标,稍微补充一下这些知识,更有助于理解后面的内容。
二. 变换和齐次坐标
2.1 二维变换和齐次坐标表达
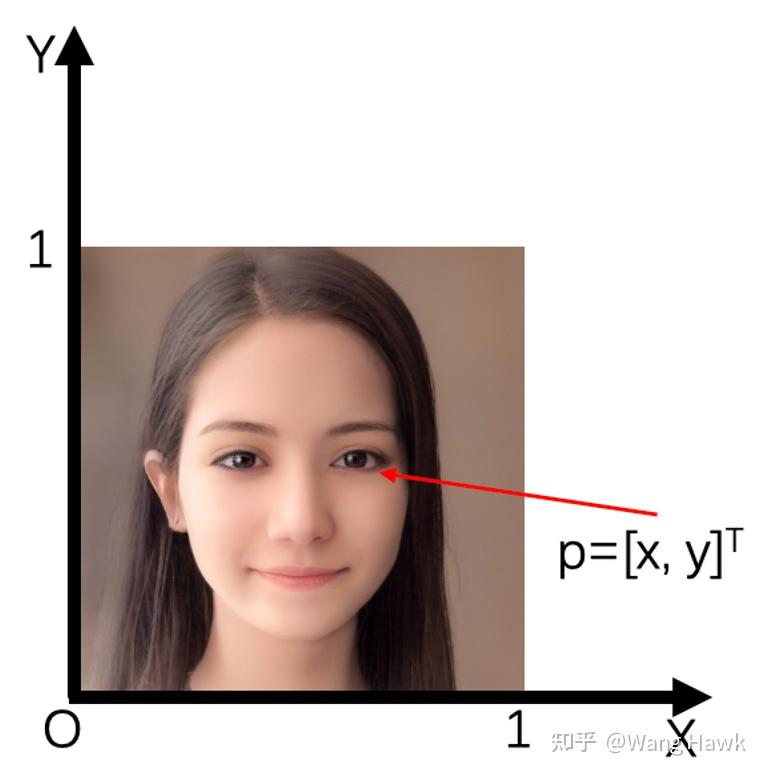
先来看看二维空间中的点,我们通常用一个二维向量来表示这个一个普通二维点p,一幅图像会由很多个二维点构成,如下图所示。
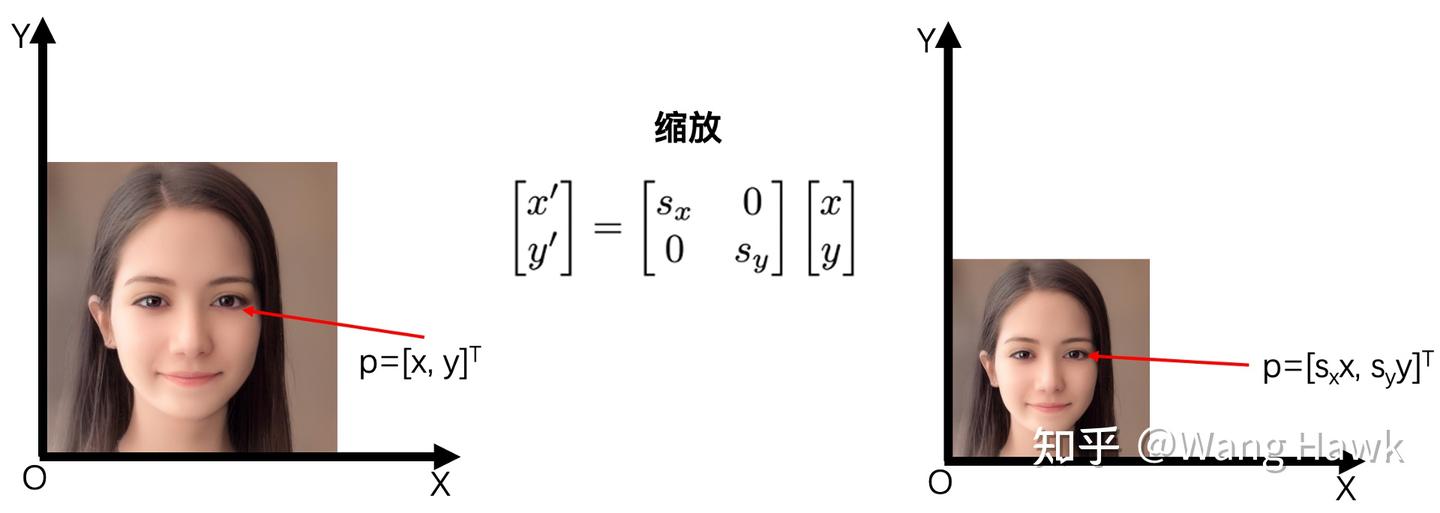
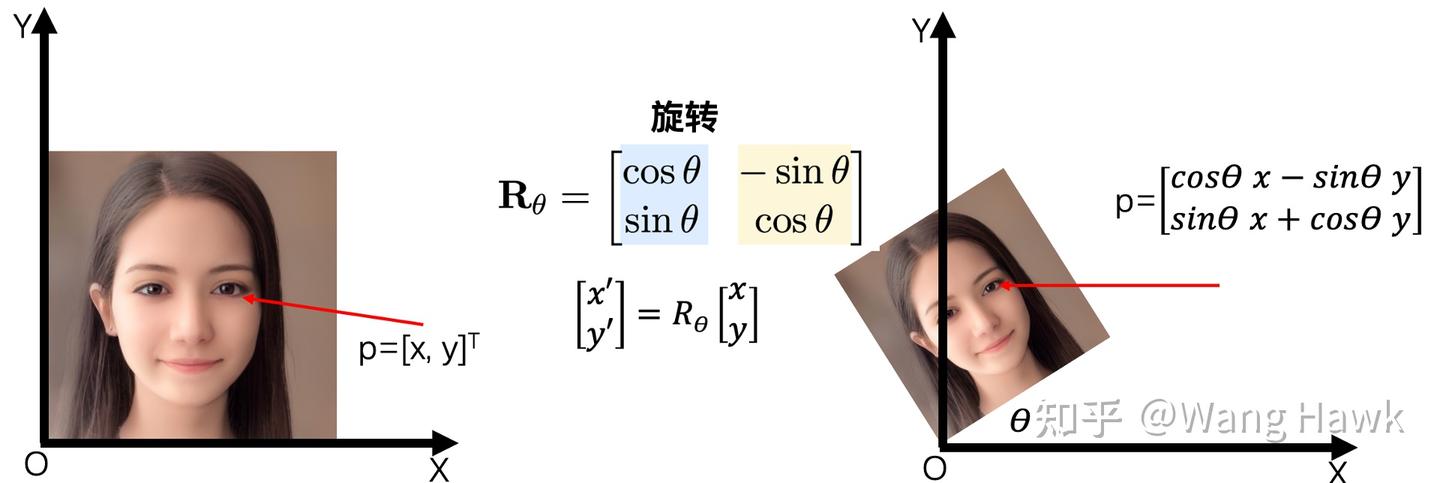
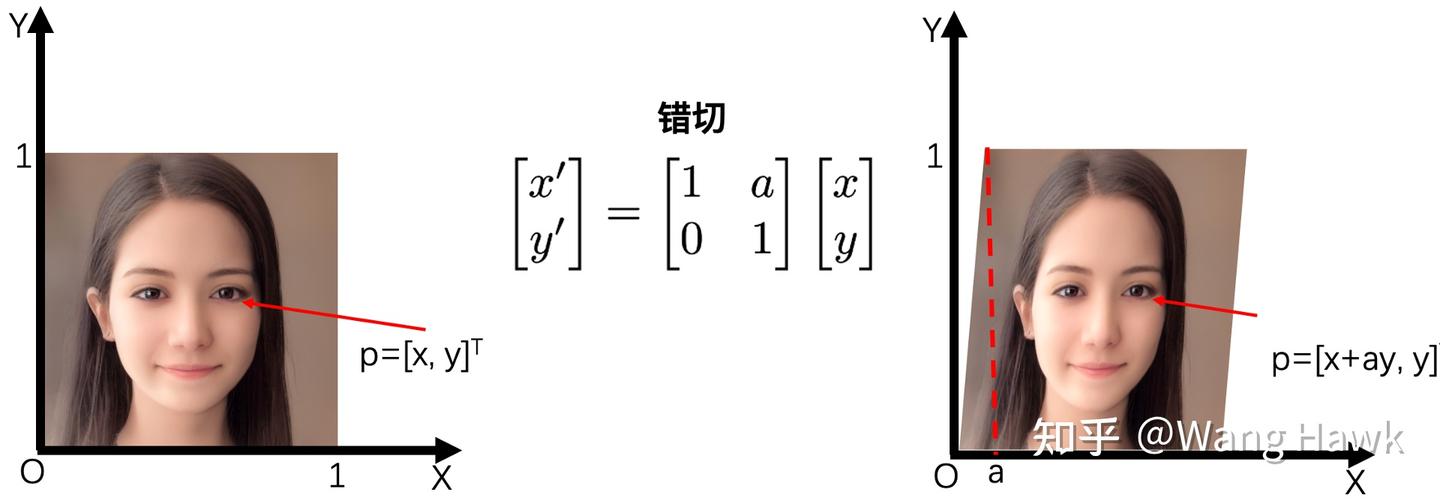
我们很容易用二维矩阵和点的乘法来表示对点(进而对图像)的缩放、旋转、错切等操作,如下图所示
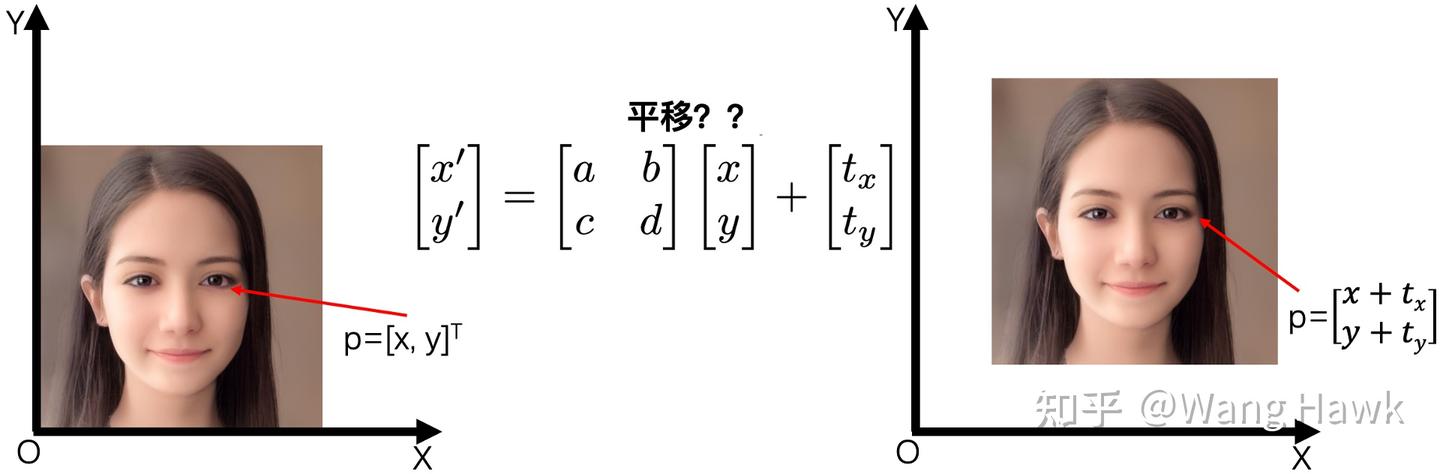
不幸的是,用二维矩阵与点的乘法无法表达二维点的平移操作。你可以自己演算下,看看下图中是否能够找到合理的二维矩阵和点的乘法来表达平移。
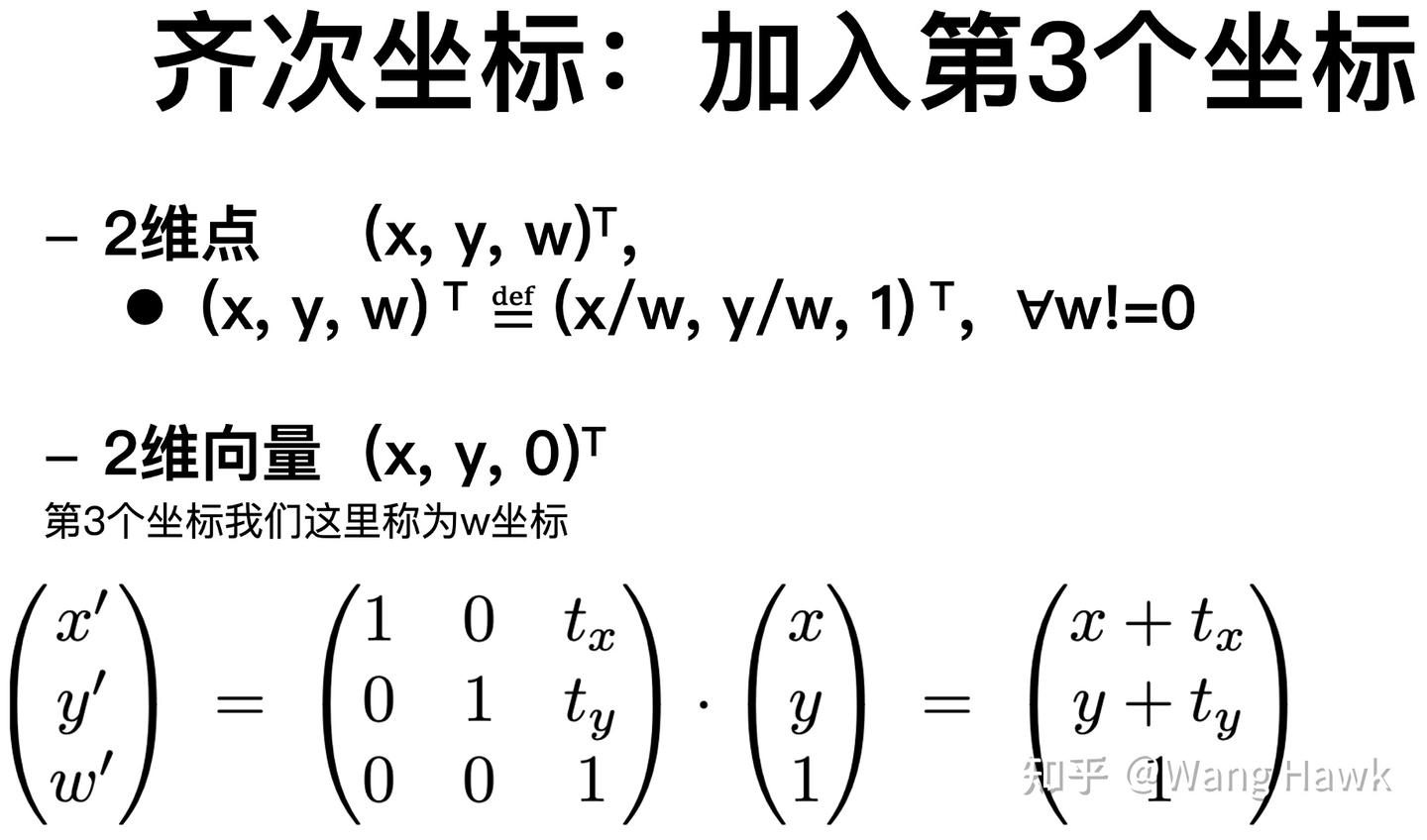
现在让我们引入齐次坐标。当我们用齐次坐标表达一个点时,我们只需要加入一个不为0的第三个坐标,就很容易用1个三维矩阵来表达平移了。要注意的是,加入任何不为0的w后,以齐次坐标的规则按下图进行坐标的等比例变化,都表示的是同一个点。
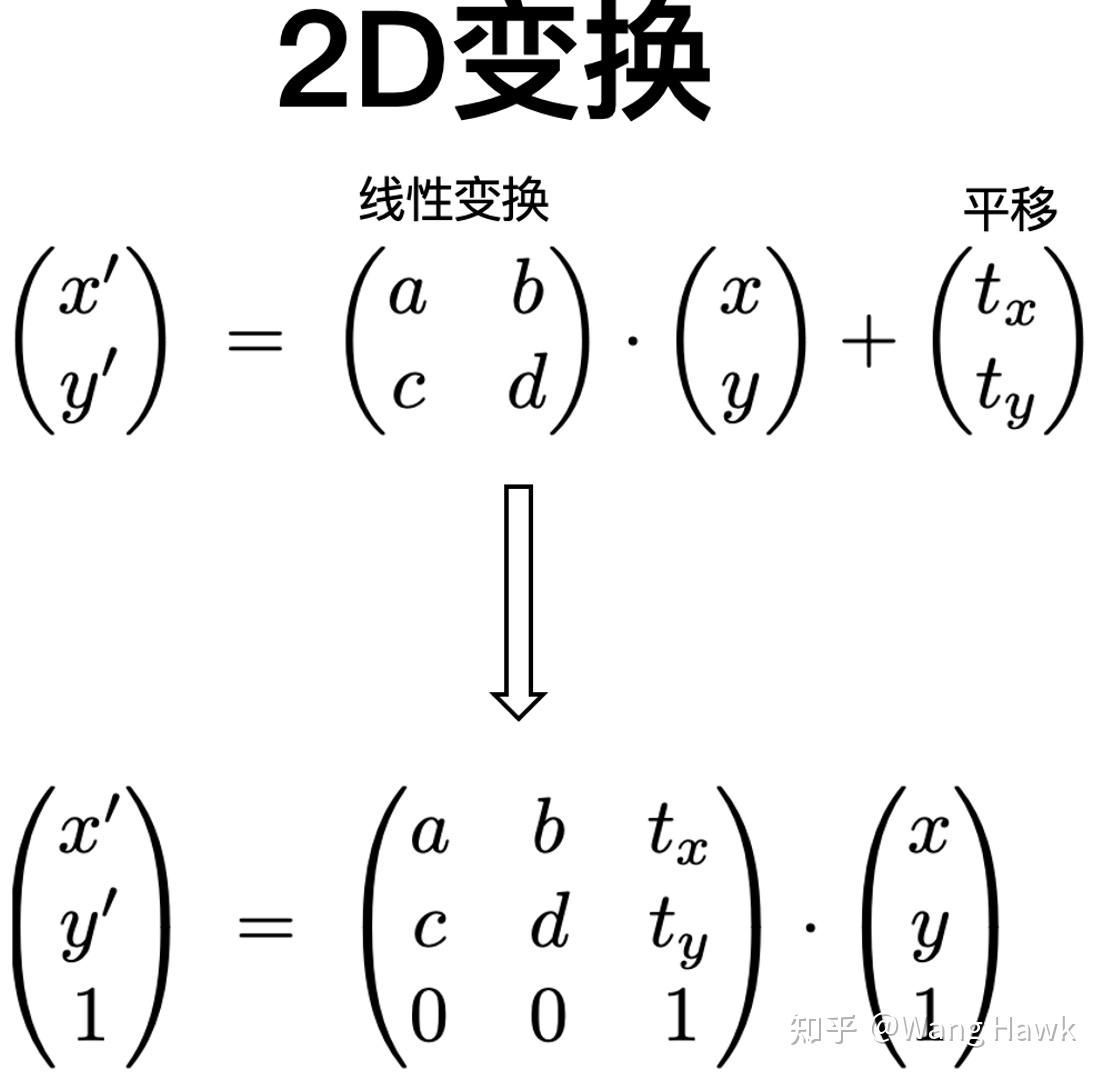
采用齐次坐标,我们很容易将各种二维变换统一到一起,用矩阵来表达这种变换:
2.2 三维变换和齐次坐标表达
在讨论相机成像时,我们需要处理三维空间中的点。因此我们来看看三维点的齐次坐标和相关的变换。
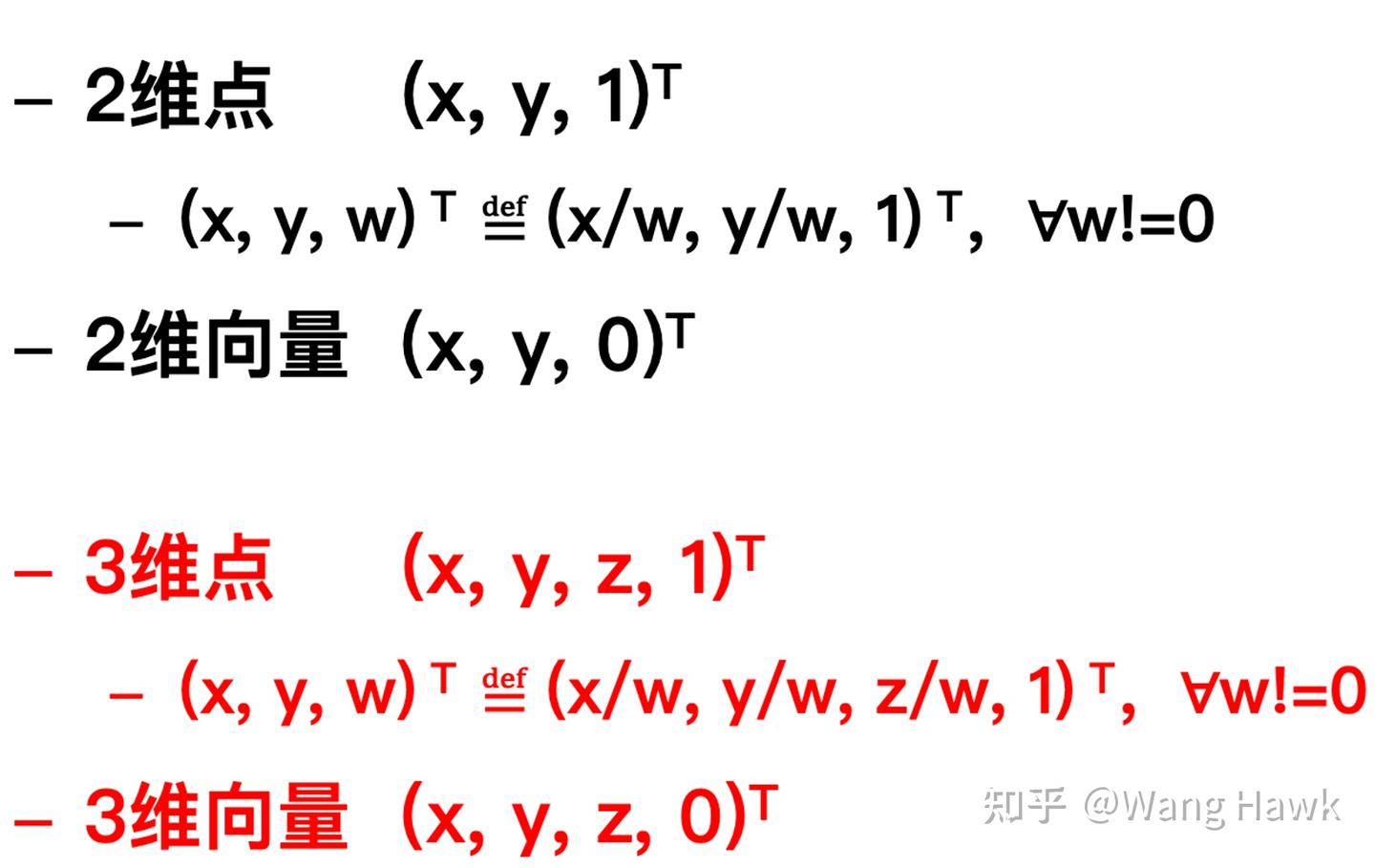
三维点的齐次表达是二维点的齐次表达的自然衍生,依然是加入1个不为0的新维度
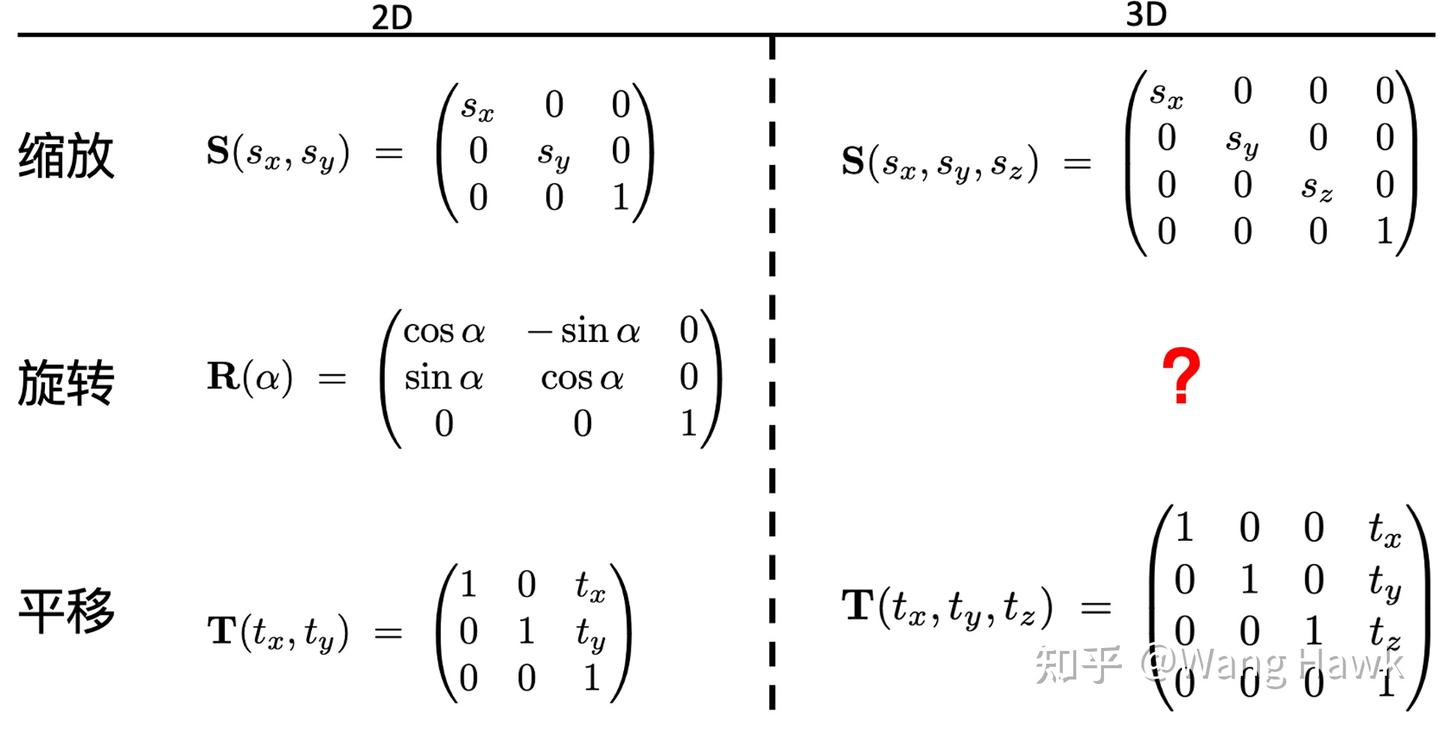
一些基本变换用齐次坐标的表达的形式也非常相似,这里面唯一不同的是3D旋转
三维空间中的旋转有可能是绕着任何一个旋转轴进行的,形式比较复杂。我们可以先看看绕着基本的坐标轴旋转的情况:
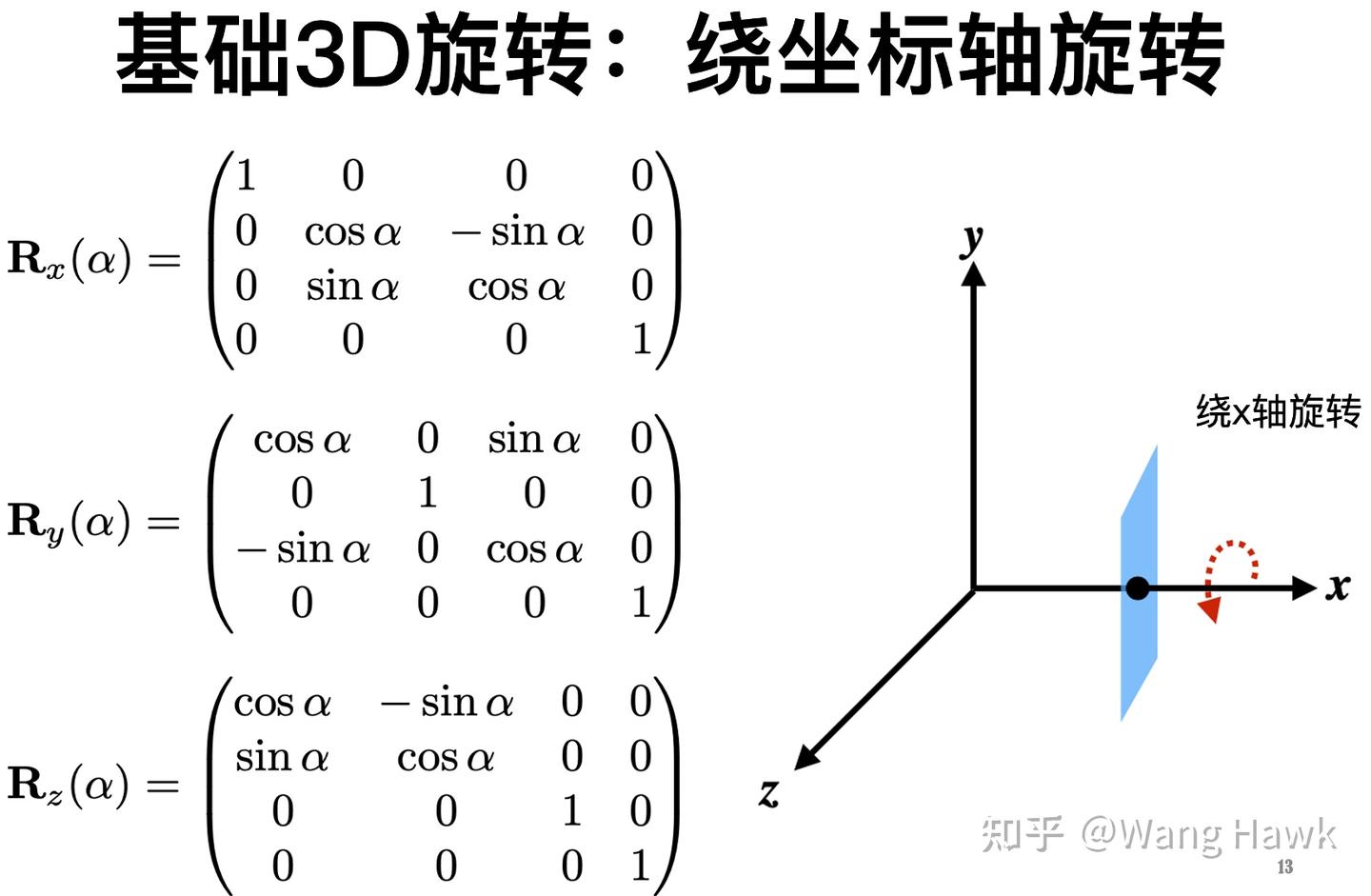
这样,绕着任何一个旋转轴的旋转,可以用上面这些基础旋转组合而成(绝大多数情况下是)

由于上面这些基础旋转都可以用4x4的变换矩阵表达,因此合并的旋转矩阵也就是1个4x4的矩阵。
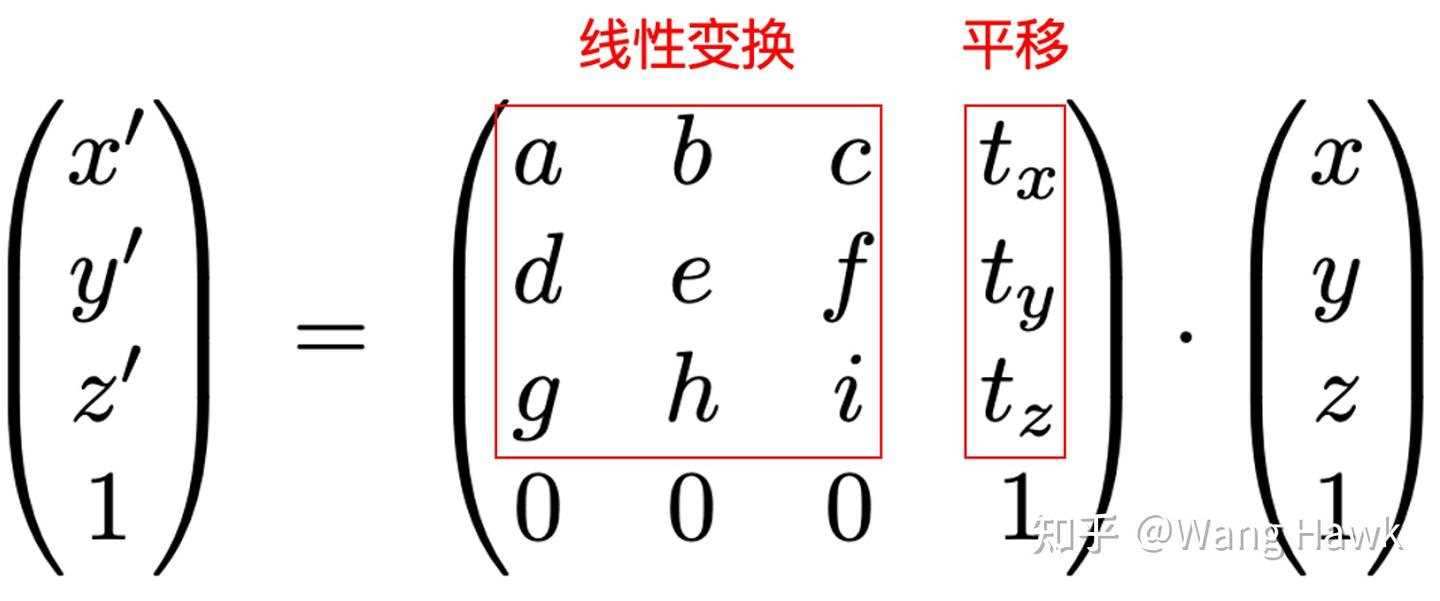
最终,采用了齐次坐标,我们就可以把各种三维变换也用矩阵和点的乘法来表达了:
2.3 旋转矩阵的特别之处
看看下面这张图,我们把原图进行旋转 θ 度,再把结果旋转−θ 度。
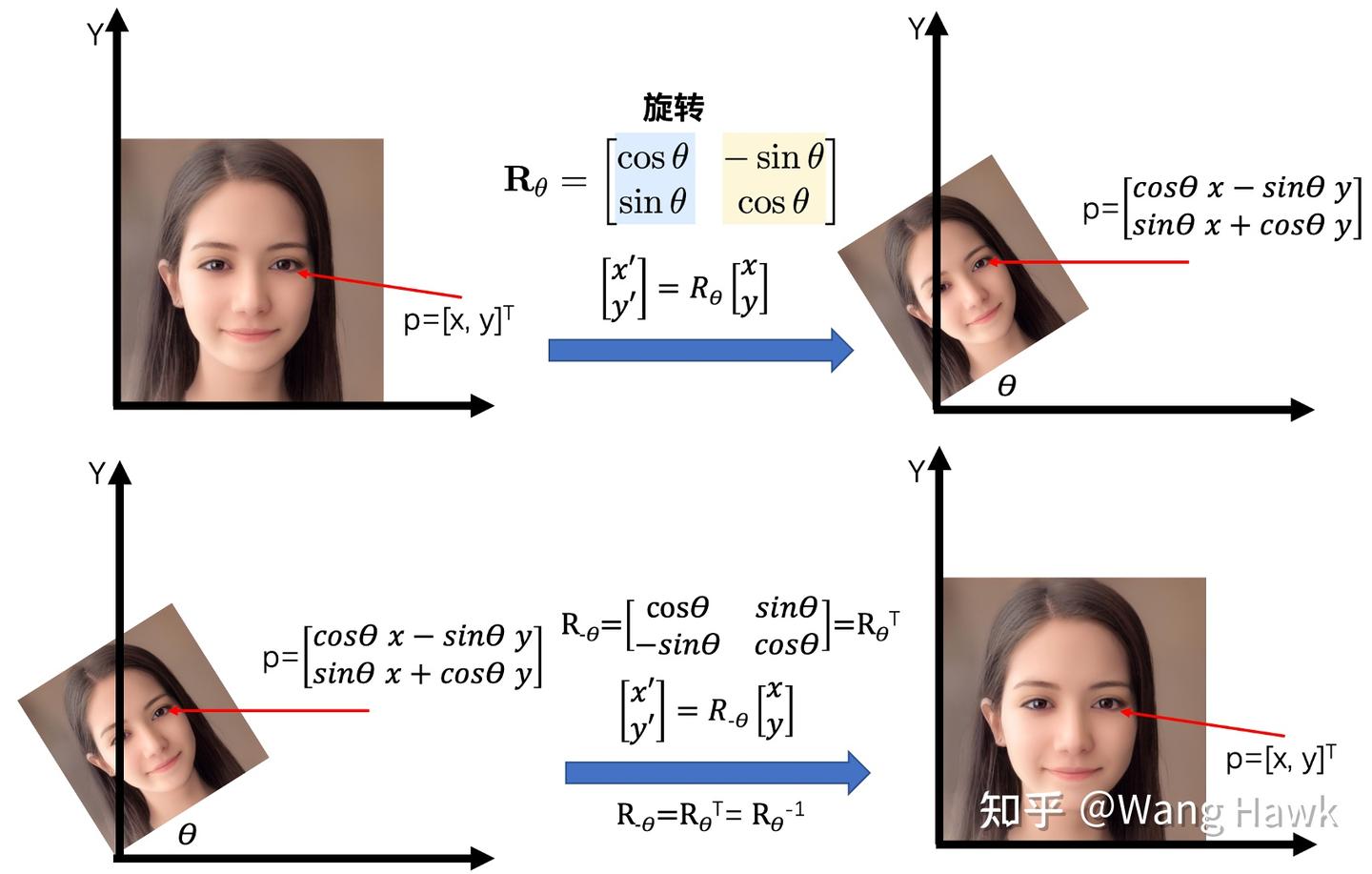
很容易得到下面两个结论,这说明旋转矩阵是单位正交矩阵,这个性质对之后我们理解相机矩阵是很有用的。
基本上,理解投影和相机矩阵的基础数学知识就回顾到这里,差不多够了。下一节我们继续来看看投影和相机矩阵。
三. 投影及相机矩阵
3.1 基础小孔相机投影矩阵
回到我们的小孔成像模型,如下图所示。我们的问题是空间点X和虚拟像平面上的点x之间的投影矩阵是什么?
很明显这里可以利用相似三角形来求解这个关系
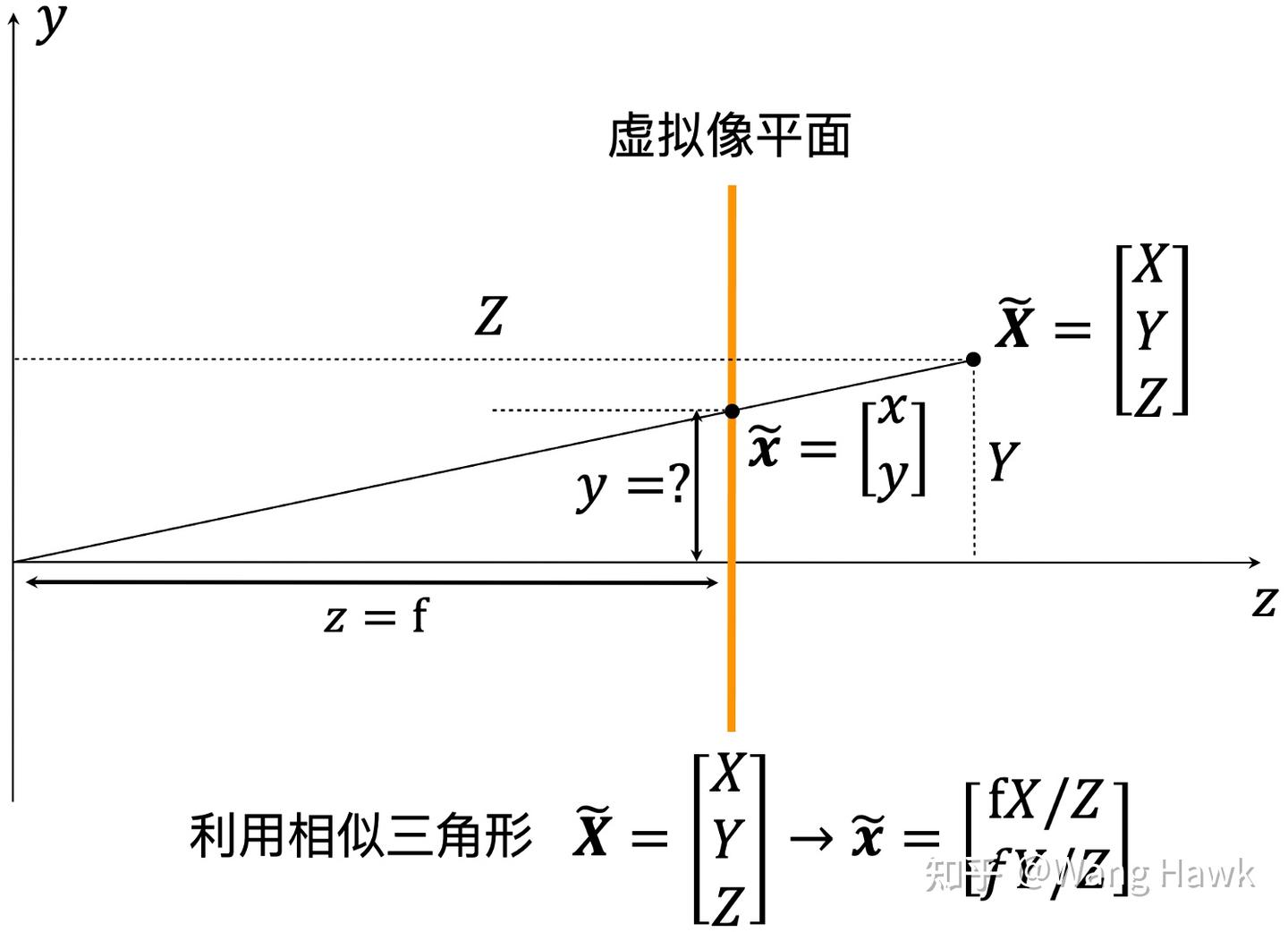
我们用齐次坐标来表达这个过程,注意点的二维齐次坐标的特性是任意等比例变换后,表示的是同一个点。
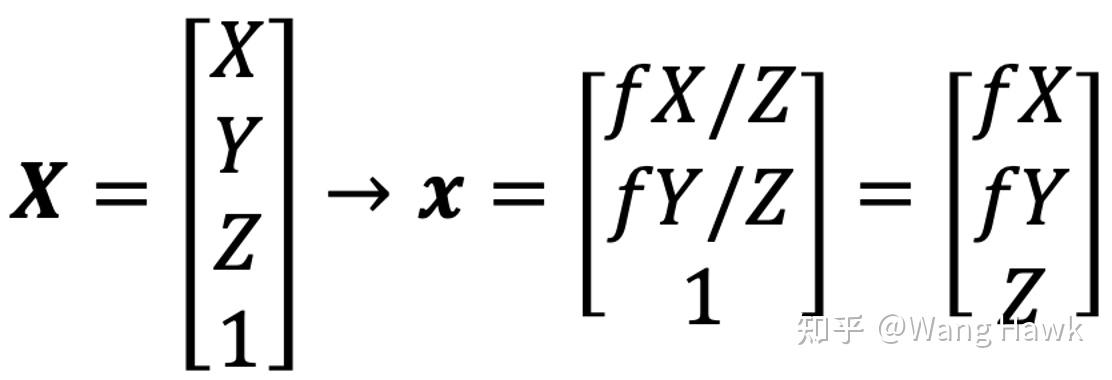
稍微思考一下,就可以用矩阵和点的乘法来表达,这里转换矩阵就是P
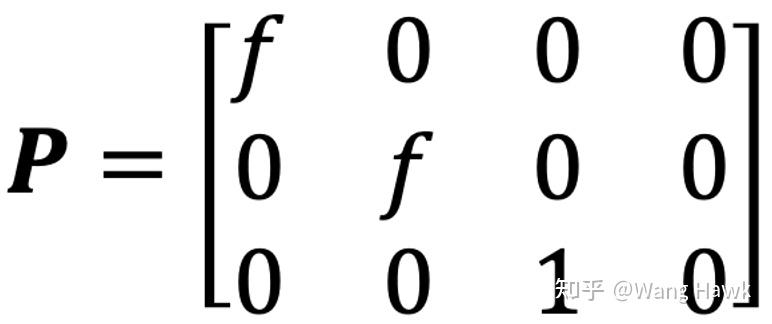
这个转换矩阵还可以进一步拆分成下面的样子:
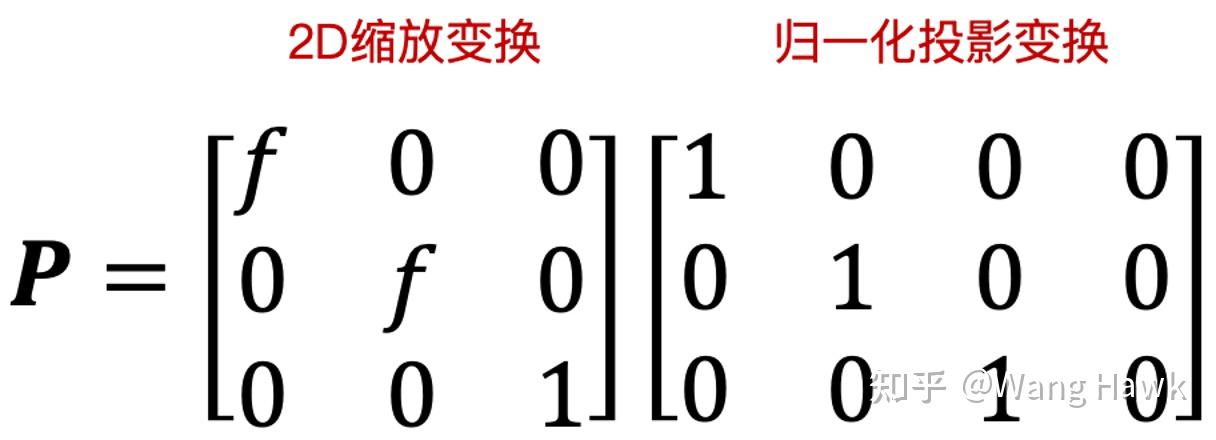
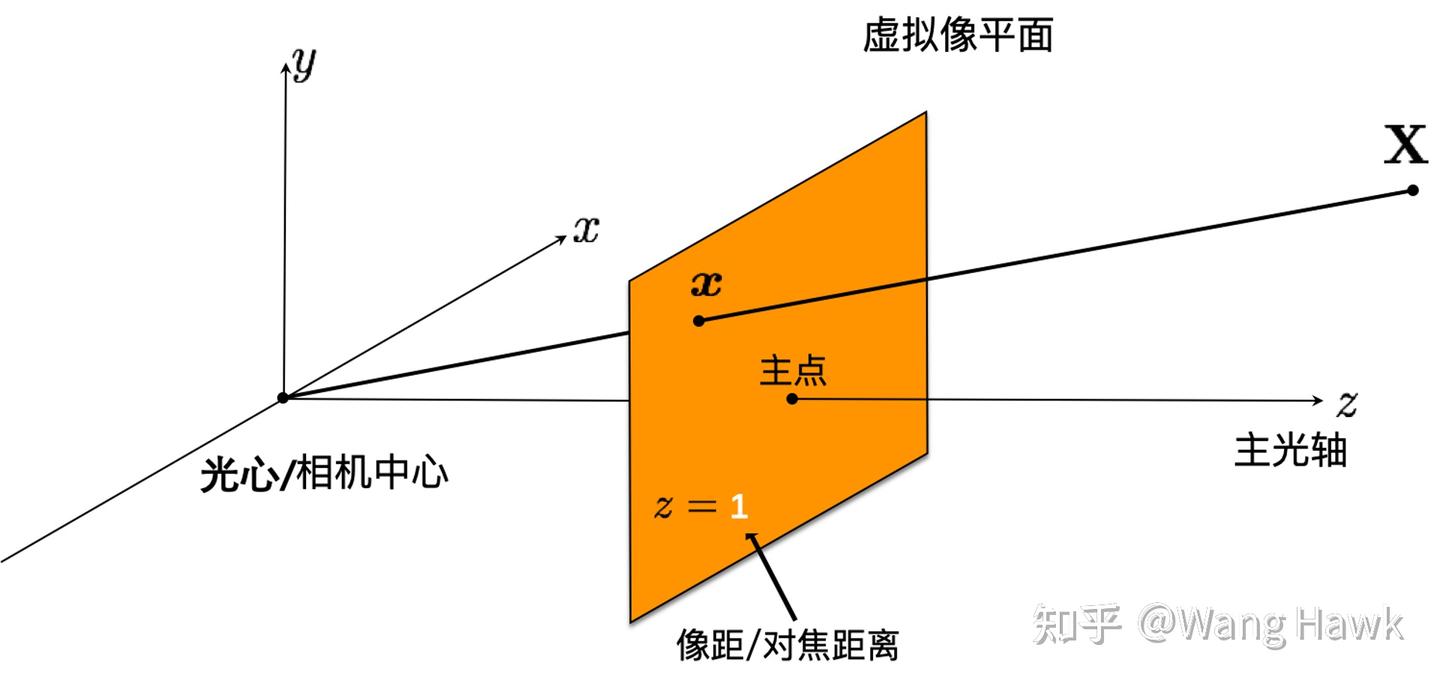
这里面的归一化投影变换,可以按下图来理解,即将三维空间点投影到了一个对焦距离为1的标准像平面上。
3.2 从投影图像到像素坐标
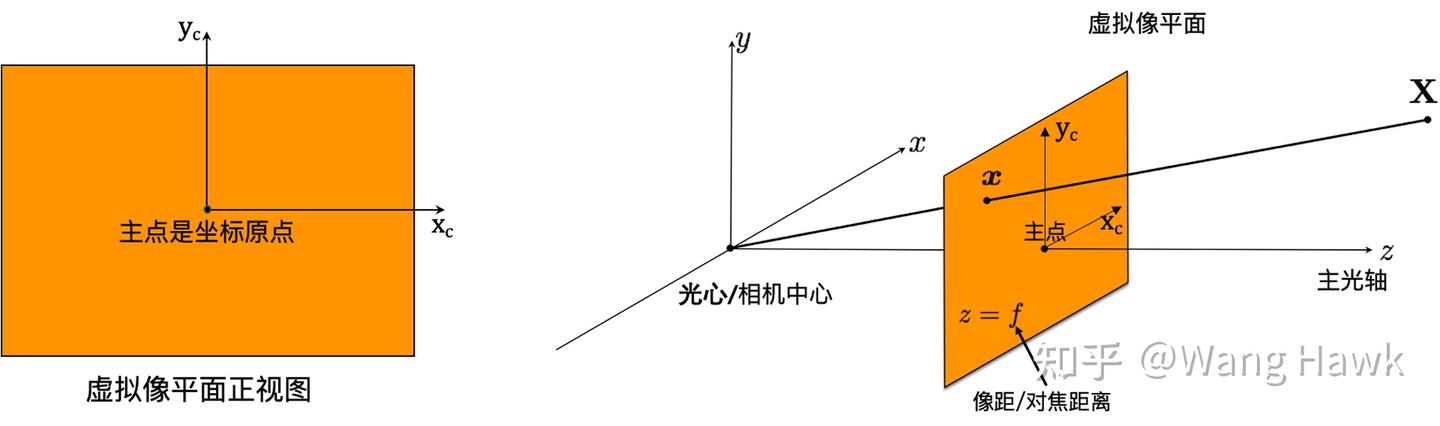
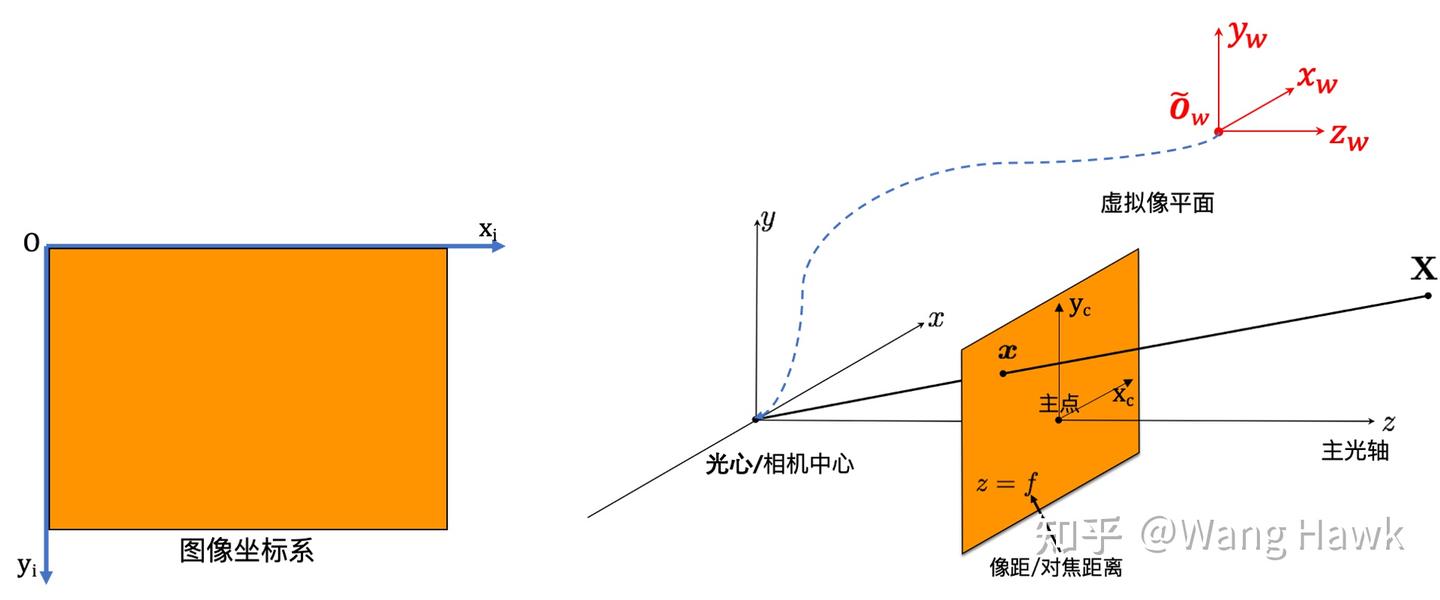
当点X投影到虚拟像平面成为点x时,从三维上讲,依然是在和三维点X同一个坐标系中,原点位于光心,点x的Z值为对焦距离f。而从二维上讲,我们可以认为原点位于主点,如下图所示
这里面就牵涉出两个问题。
问题一:坐标原点问题
一般来说,实际图像的坐标系原点并不是在主点。 常见的设定是将原点放置于左上角或左下角,就像下图所示
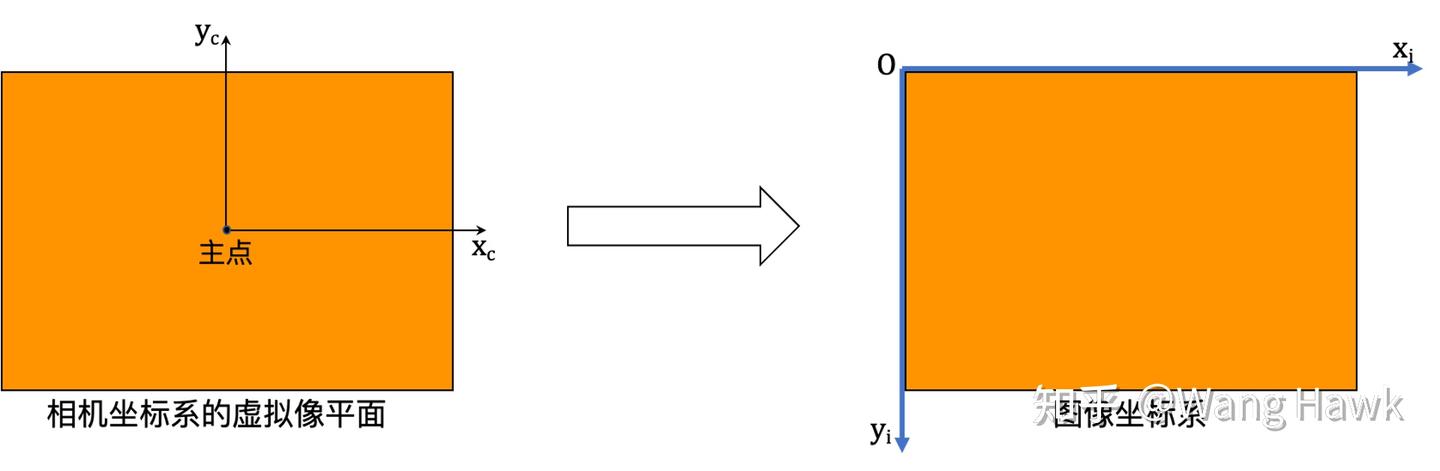
这意味着我们按照3.1节所示进行投影,得到的坐标值需要按照新老原点的相对位置进行偏移。
这样,我们的投影矩阵需要加入偏移量:
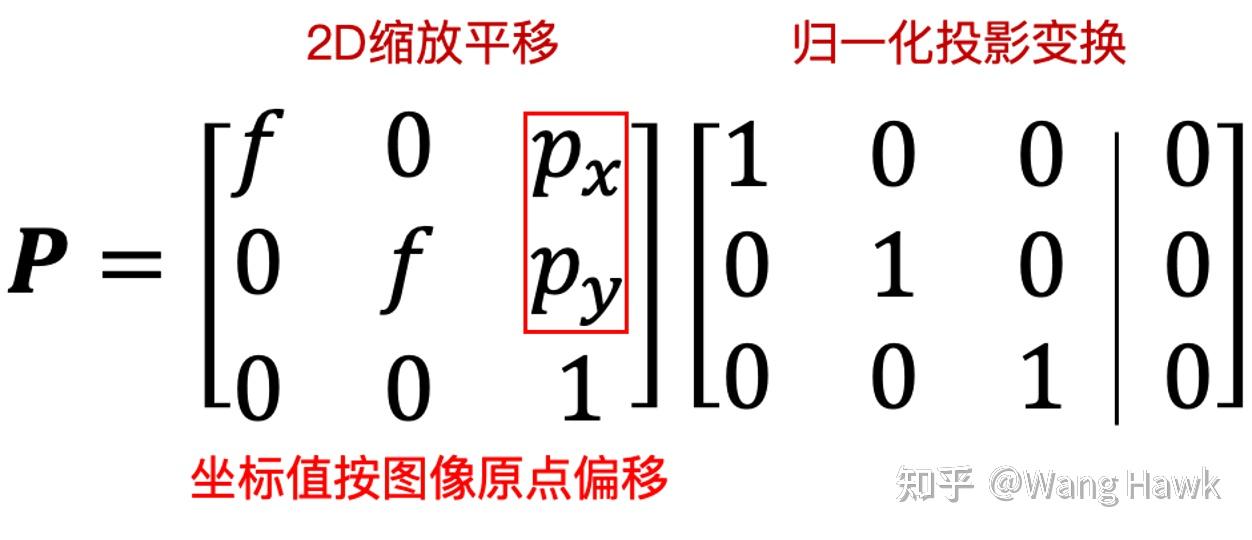
问题二:坐标单位问题
当我们投影到虚拟像平面时,所有的单位都是不变的。 例如我们采用毫米来描述三维点相对相机光心(原点)的位置时,虚拟像平面上的像点的坐标就依然用毫米来描述。然而,真正转换成最终的图像时,我们习惯于用像素来描述相关的坐标。这意味着我们按照3.1节所示投影得到的坐标值,里面相关元素都需要按照毫米到像素的比例进行等比例的变化。
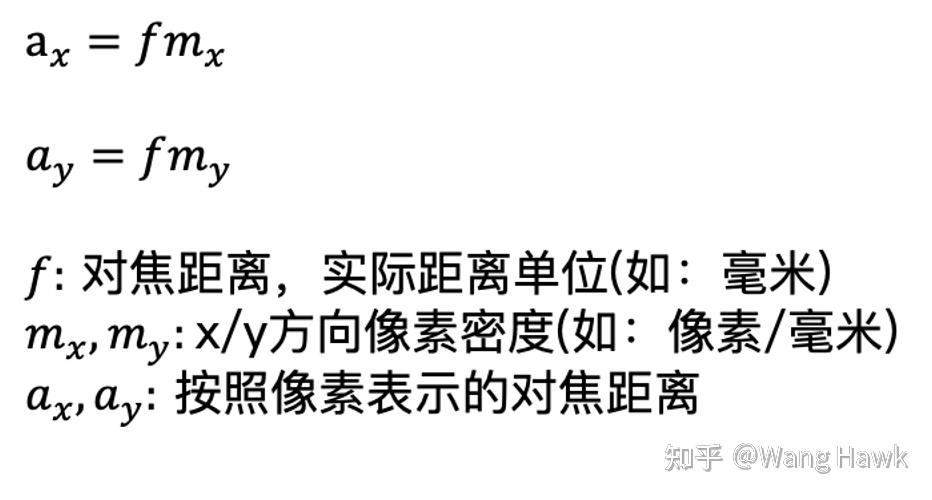
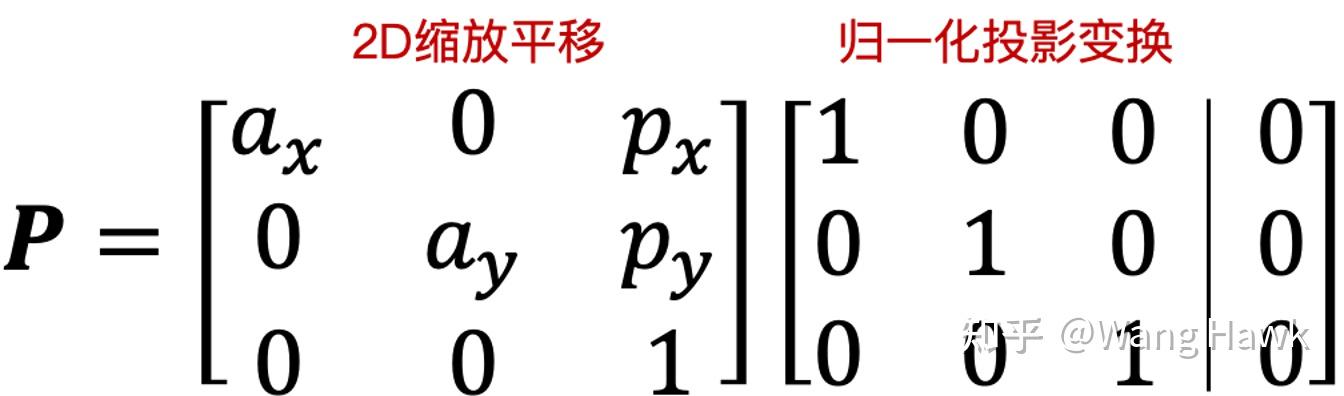
那么,投影矩阵进一步变为:
3.3 从世界坐标到相机坐标
我们当前在表达小孔相机的投影模型时,认为三维空间点X的坐标是位于相机坐标系的,如下图所示:
然而,在实际的投影时,我们有时很难用相对于光心的位置来表达坐标。比如在拍摄下面这个美女时,除非经过精确的相机于她的脸部的空间关系的测量,否则我们很难表达她的右眼角相对于相机光心的物理坐标。而且就算能够测量出来,但实际表达时也会很不自然。但如果把坐标原点定位于她的鼻尖,我们就能较为自然的表达出她脸上的任何一点的坐标了。
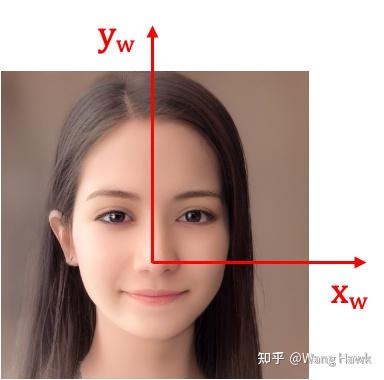
我们把这种方式表达的坐标叫做世界坐标,而原来相对于相机光心表达的则是相机坐标。如果你知道了一个点X的世界坐标,想知道它投影到图像上的像素坐标,你是不能直接采用上面描述的相机投影矩阵来计算的。而是需要先把世界坐标转换为相机坐标值。比如,上面鼻尖的世界坐标值(非齐次表达)是[0, 0, 0](单位mm),而它相对于光心的坐标值可能是[50, 50, 500](单位mm)。
因此,为了构成一个从世界坐标系到图像像素坐标系的完整投影矩阵,还需要考虑到上面这种坐标系的转换。
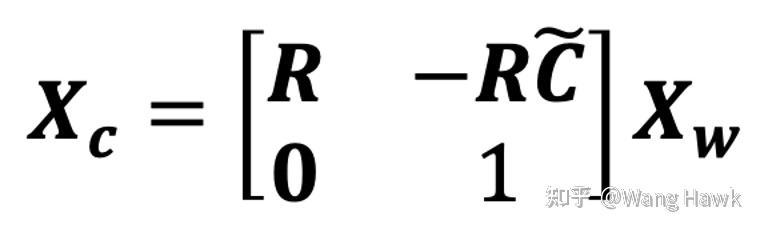
从世界坐标系到相机坐标系的变化包括两步:
- 坐标原点平移到光心
- 各个世界坐标轴经3维旋转到和相机坐标轴对齐
所以这是一个先平移,再旋转的操作,用非齐次坐标表示时,是这样的:

而如果用齐次坐标表达,则是:
现在我们整合前面所有的变换分量,可以把从世界坐标系到图像坐标系的变换表达如下:
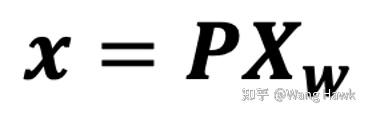
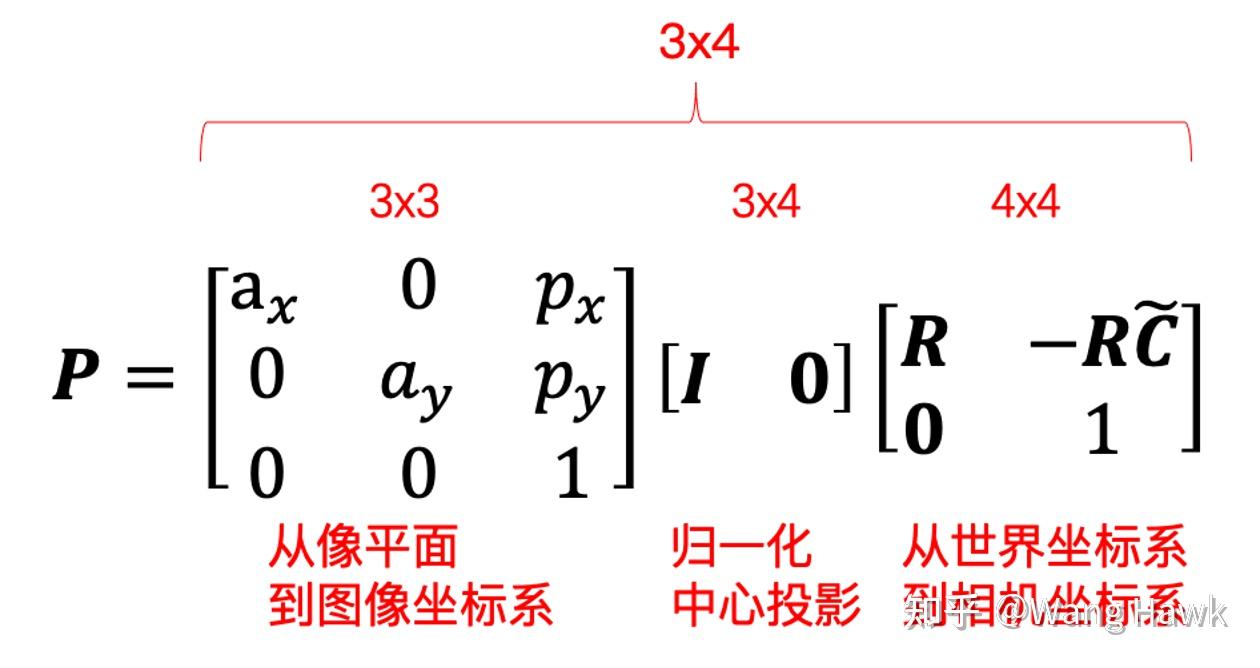
所以投影矩阵就是一个3x4的矩阵,而这个式子还可以简洁的表示为:

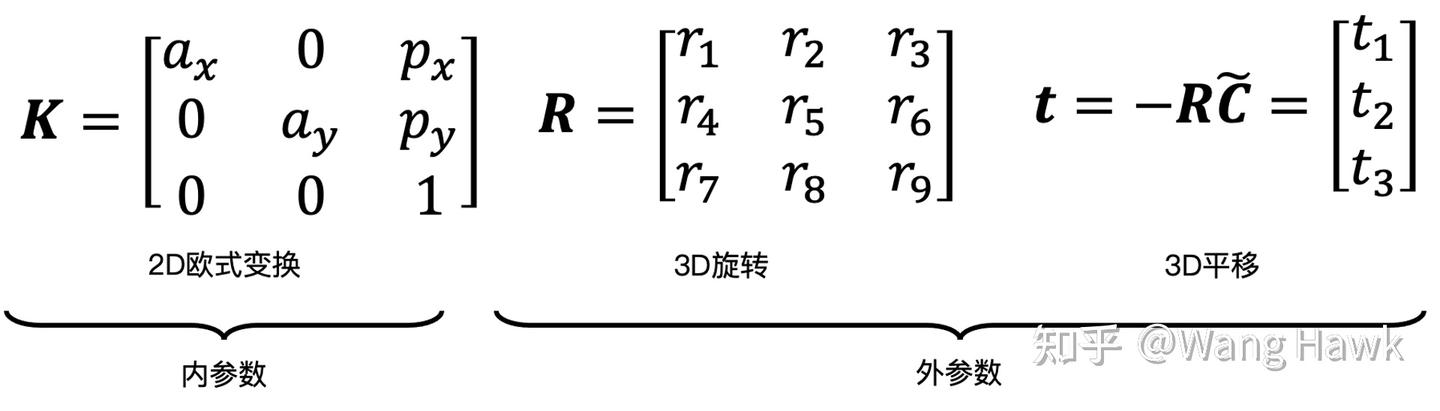
其中我们把K称为内参,P的其余部分是外参:
3.4 错切的影响
现在的传感器工艺已经非常好了,很少出现长宽不等的像素。但某些时候,我们依然要考虑这种情况,这样K就需要另外一个元素来描述,表示如下:
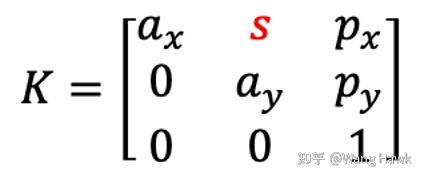
既然传感器工艺已经不再有不方正的像素了,那么什么情况下s不为0?其中一种情况就是当我们拍摄一个已经拍摄好的照片时,比如拍一个杂志封面,如果相机和杂志间不是平行的,那么整体的投影矩阵会出现不为0的s。
总之,考虑到这个情况,整个3x4的投影矩阵的自由度就变成了11个,其中包括了5个内参数,3个旋转分量,3个平移分量。
3.5 透视现象
前面我们已经看到,当物体投影的虚拟像平面时,坐标会等比例的变化,形成“近大远小”的现象
我在文章手机中的计算摄影4-超广角畸变校正中已经为你展示了透视现象的特点,现在引用其中内容如下:
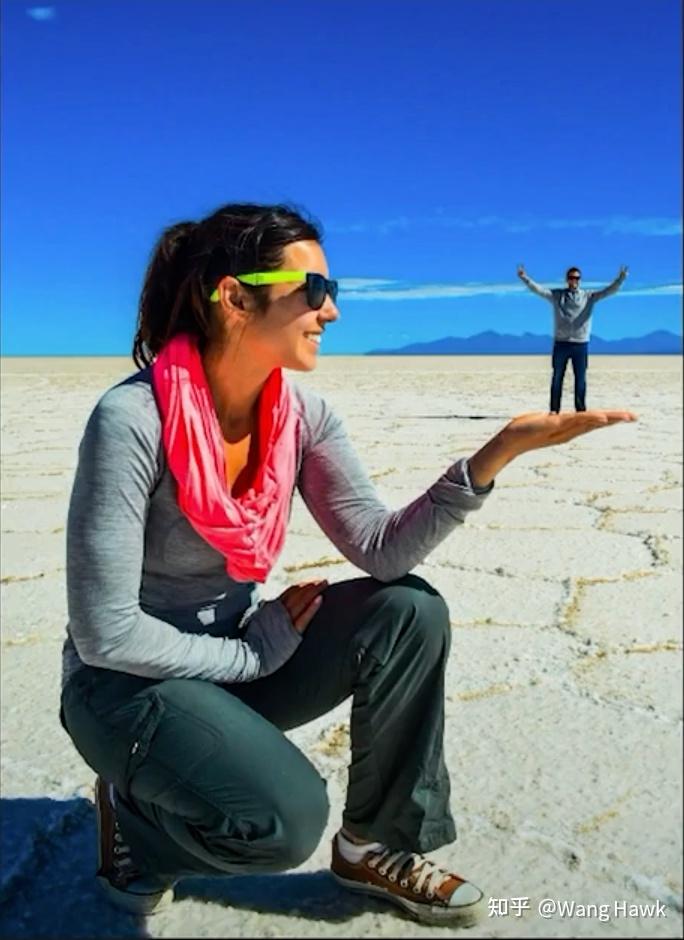
人们很早就学会了利用透视效应来拍摄有趣的摄影作品:
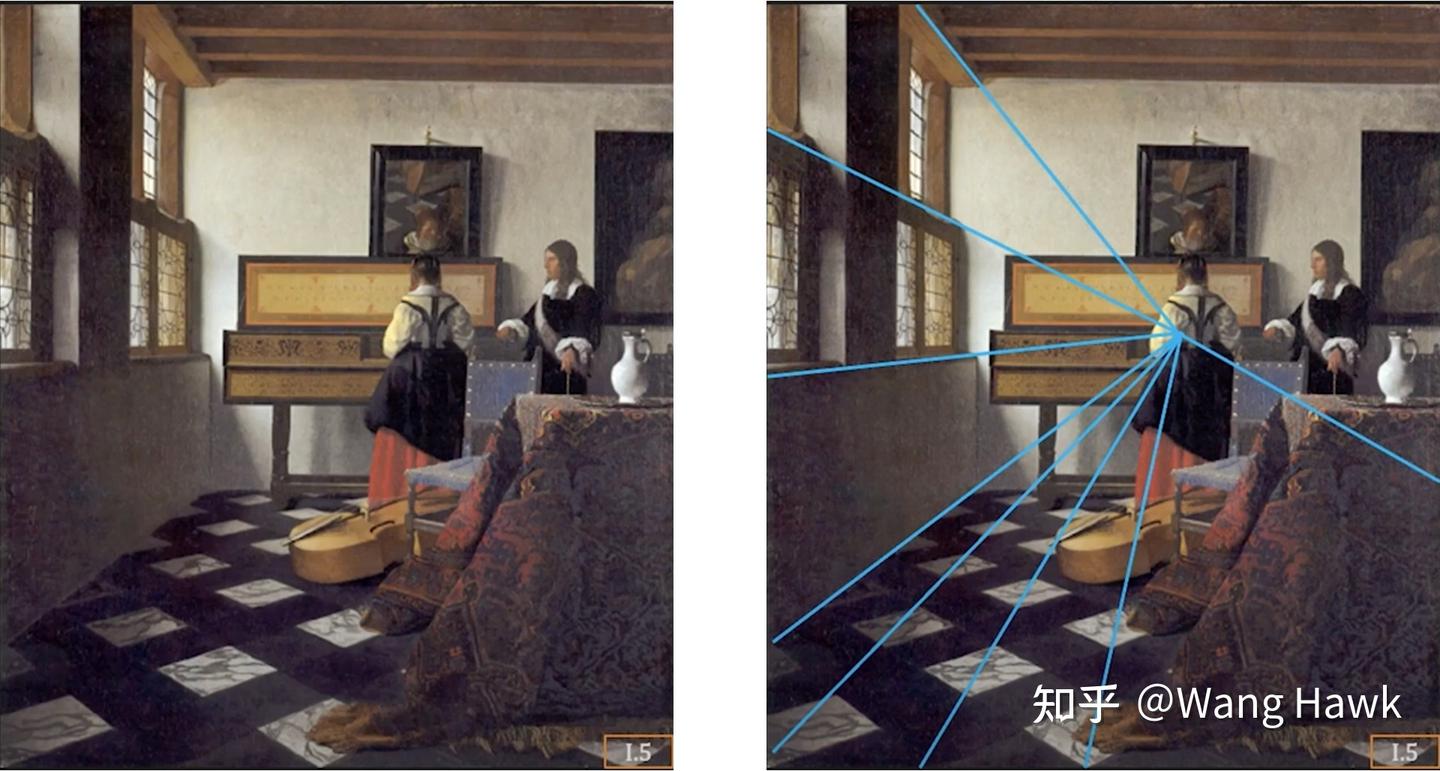
透视投影还会使得三维空间中的平行线在画面中相交,其交点称作为消失点。

艺术家早就会使用透视技术,来突出主体了,例如下面这幅画是荷兰著名画家约翰内斯·维米尔(Johannes Vermeer)的作品钢琴课。画家利用透视效应,将主人公安排在了整个画面几条直线的消失点上,从而实现了突出主体的作用。
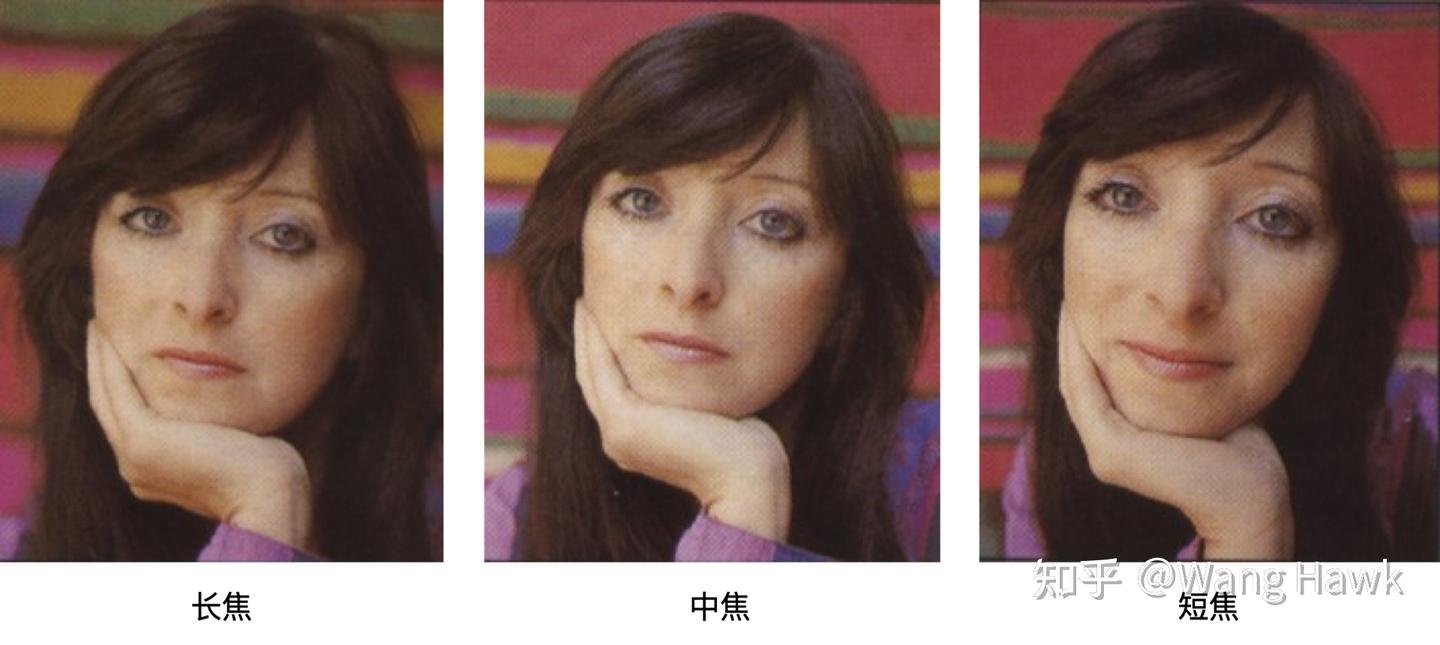
然而,透视效应也会导致画面的形变,我们看到拍摄同一个姑娘时,短焦镜头(广角镜头)出现了强烈的透视畸变。这是因为为了拍出同样尺寸的像,短焦镜头拍摄时物距更近,因为透视效应的近大远小法则,这种形变显得更加明显。尤其是在近距离拍摄时,人脸上鼻子相比脸侧面距离镜头更近,所以鼻子成像时放大得更大,于是人脸就显得更加诡异了。
除了上面这种因为近距离拍摄导致的形变,透视效应还会导致远离相机中心的物体被拉伸,比如下面这张用iPhone13 Mini的广角镜头拍摄的照片。相比起上面因为近距离拍摄导致的形变,这种边缘物体被拉伸的现象是我们更常见的情况。

那么问题来了,有没有相机在成像时没有透视效应呢?下一小节我们就来探讨这个问题。
四. 其他相机模型
我们知道小孔相机因为透视效应,会呈现近大远小的情况。下图你可以看到Z在像坐标的分母,这也说明了这一点。
现在想想,如果我们能不断增大Z,同时还让f也不断增大,并且f/Z始终是一个常量,那会怎么样呢?
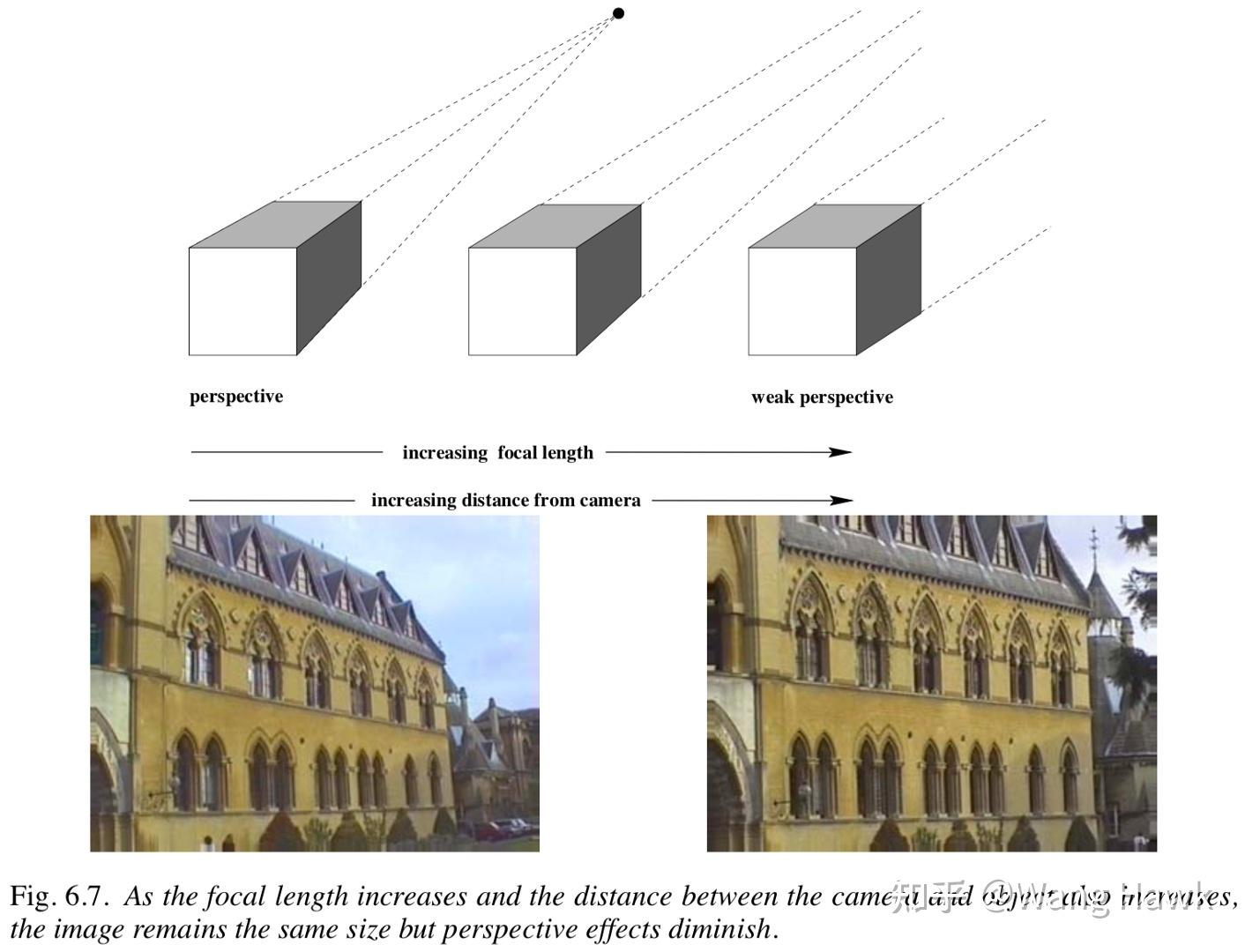
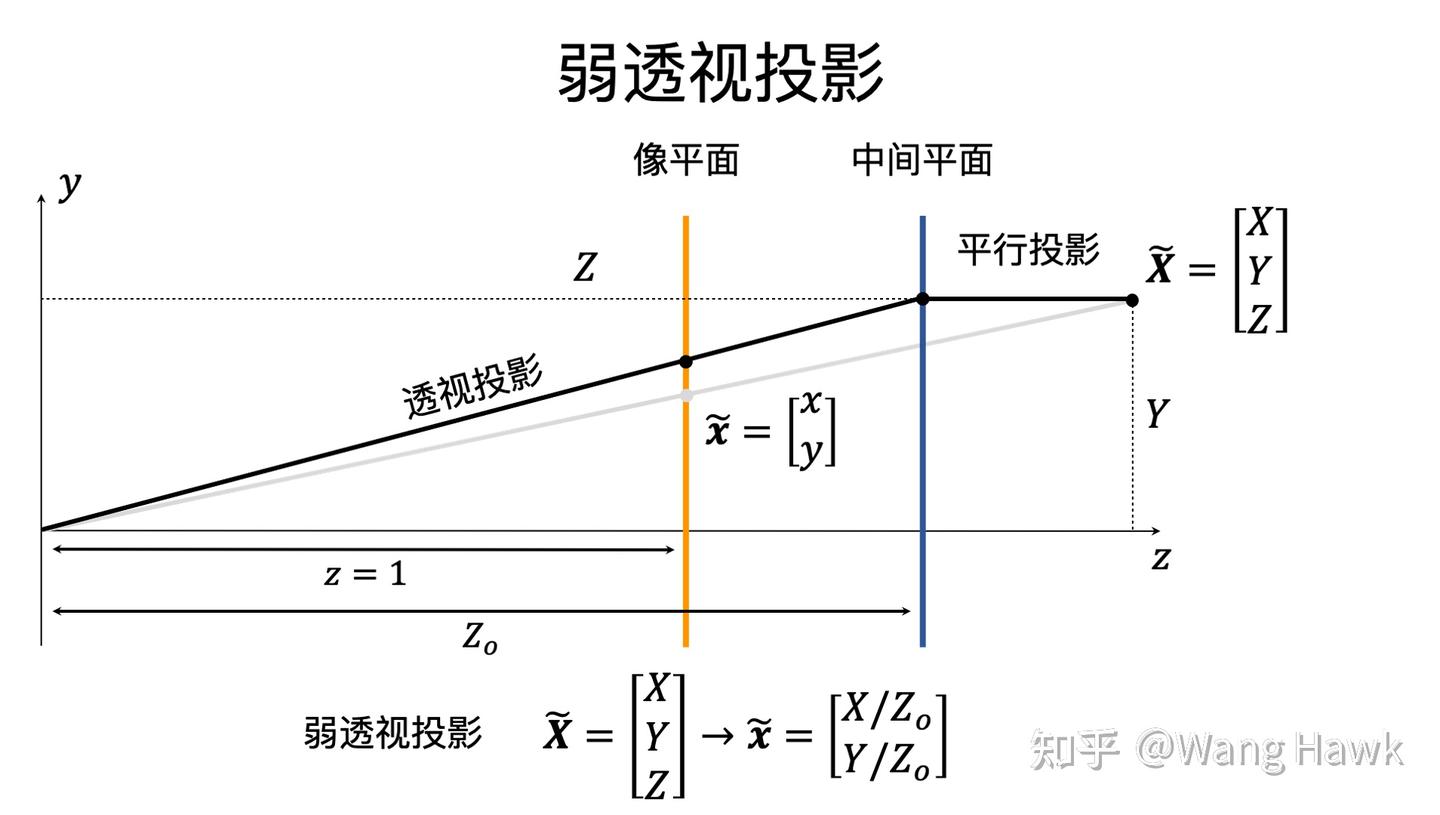
很明显,这个时候就不再有近大远小的现象了,不管远近所成的像的大小都一样!当成像系统物距很大且像距也很大时,此时的投影关系就变成了弱透视投影,成像的几何尺寸与物距的关系就非常弱甚至没有了。《计算机视觉中的多视角几何》一书中的插图形象的说明了这一点:
比如,当我们拍摄远景时,此时的成像系统可以近似认为满足弱透视投影关系

另外如果成像系统满足如下几何关系,也能形成弱透视投影,只要物距大于Zo,那么不管远近成像的尺寸都与物距无关了,只与图中中间平面的物距Zo相关。
要构成这样的投影关系也比较容易,只需要用透镜成像+小孔成像即可。这种相机我们称为仿射相机
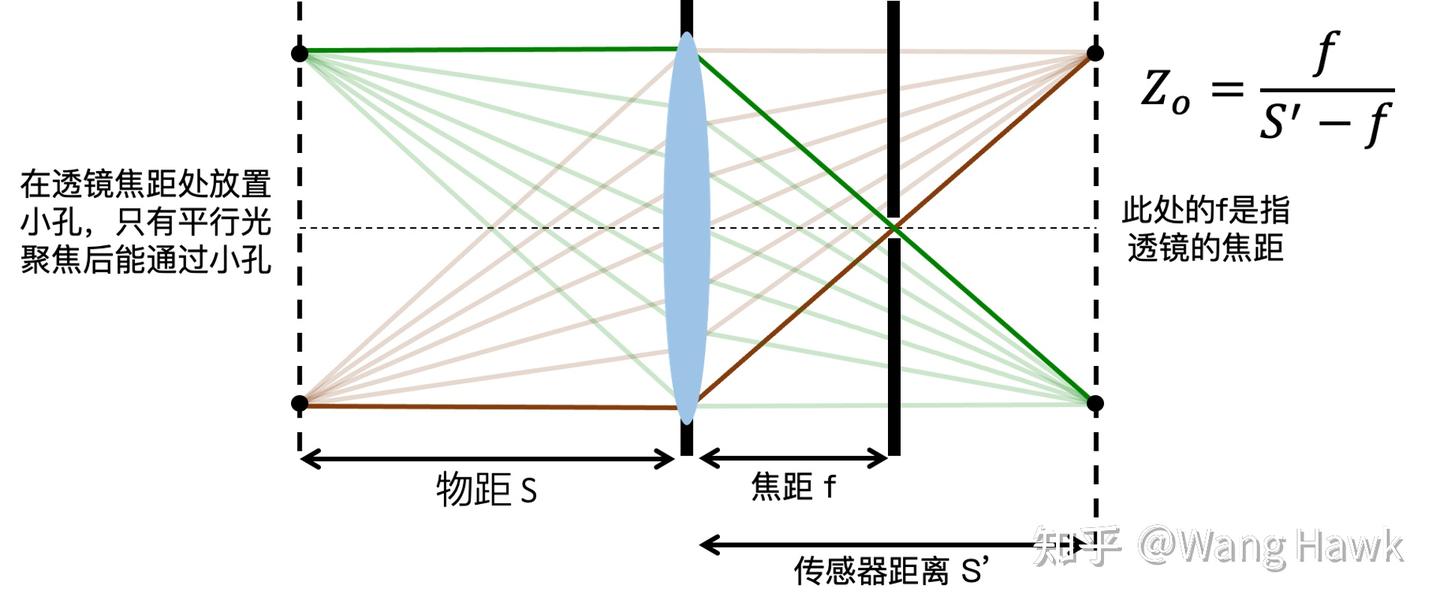
那么仿射相机的投影矩阵是什么呢?
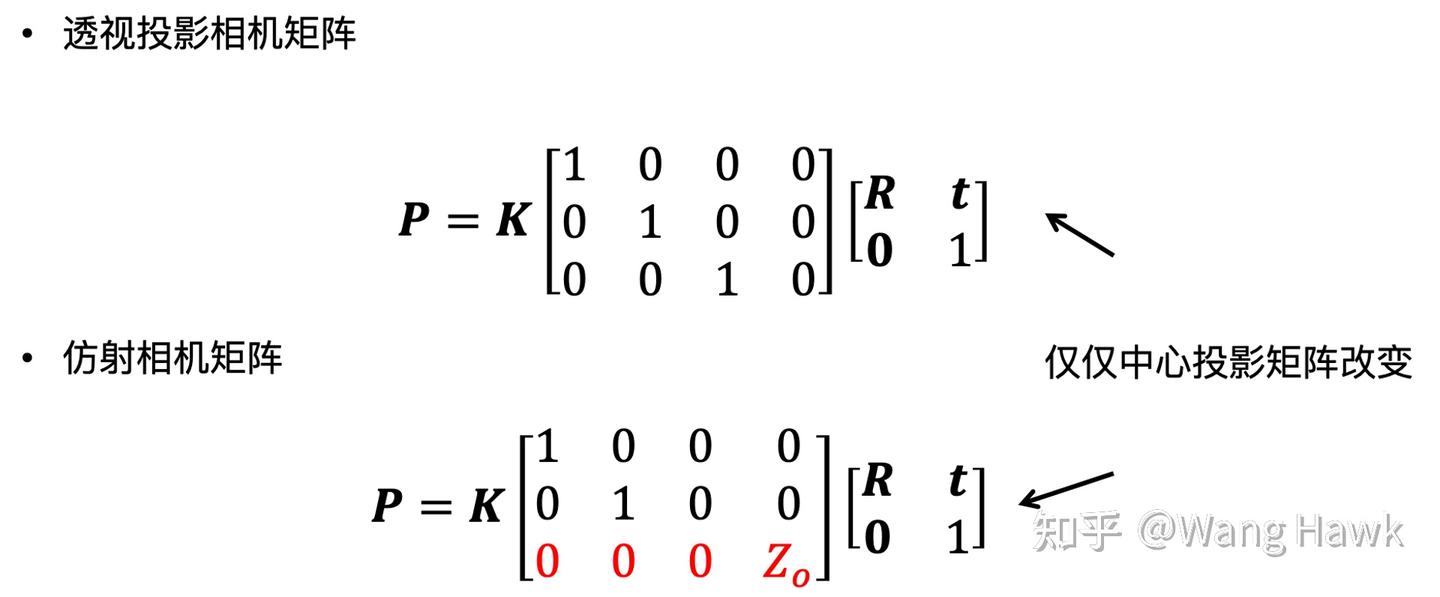
仿射相机的投影矩阵的最后一行可以转换为[0 0 0 1],这是它最大的特点。
如果上图中Zo=1,会如何呢?我们看到
Zo=1,意味着S' = 2f,这时候小孔相机放大倍率为1, 于是投影关系就变成了所谓的正交投影
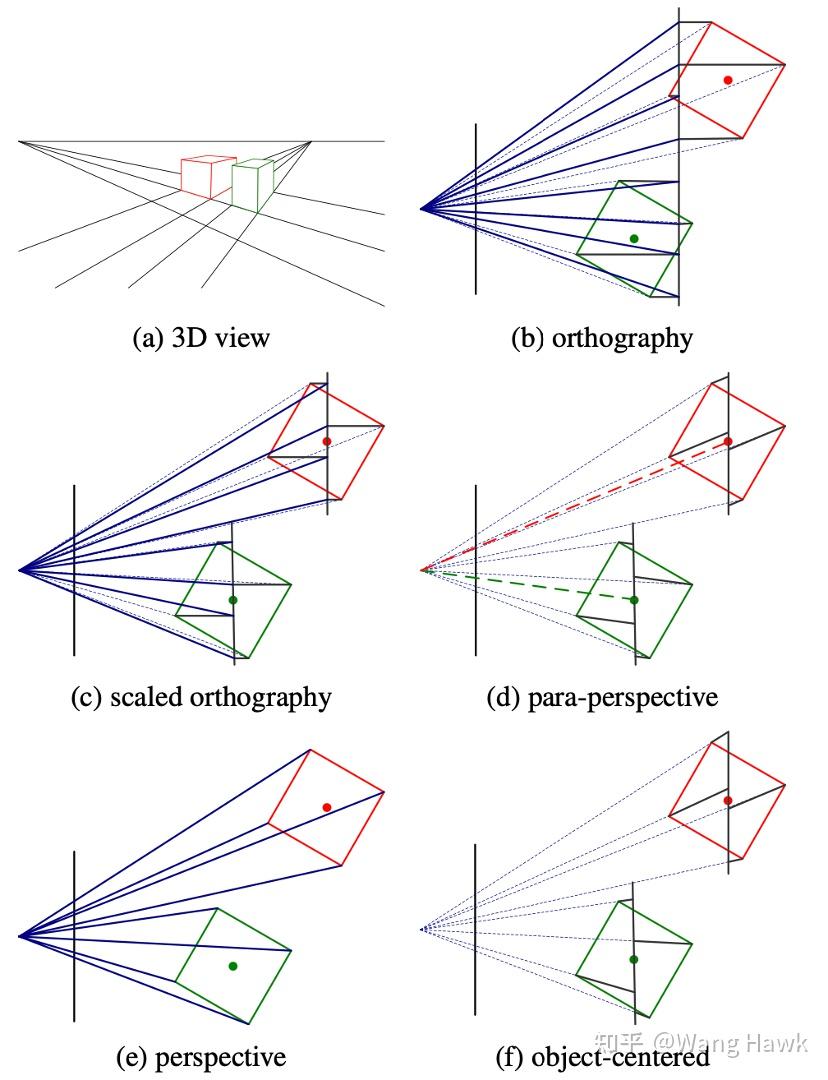
事实上,还有很多种投影方式,限于篇幅,我就不再详述了。大家可看《计算机视觉:算法与应用》中的下图,感受一下:
五. 总结
今天这篇文章主要回顾了小孔相机和薄透镜成像相机的几何模型,结合2D、3D齐次坐标和坐标变换的知识,讲解了相机矩阵。我们知道了相机矩阵由几个部分组成:内参矩阵K,以及外参矩阵,后者由投影矩阵、世界坐标系到相机坐标转换的矩阵组合而成。对于普通的透视成像,一共有11个自由度。它包括了5个内参,3个旋转角度,以及3个平移量。
当我们知道一个点在世界坐标系的坐标,同时又知道了投影矩阵P时,可以很容易的计算出它在图像中的坐标。





)








完整指南)



![[实战]巴特沃斯滤波器全流程解析:从数学原理到硬件实现](http://pic.xiahunao.cn/[实战]巴特沃斯滤波器全流程解析:从数学原理到硬件实现)
