- MATLAB
- 在 Simulink 里做以下设置
- MATLAB 脚本调用示例
- python 实现
- 离散 PID 实现(并行形式)
- Simulink 中两种 PID 结构(并联形式, I-形式)下连续/离散时域里积分增益 I 的表示
- 并联(Parallel) vs 理想(I-Form),use I*Ts 的勾选
- 什么时候用连续域 vs 离散域?
MATLAB
首先,MATLAB simulink 的 PID 长这样:

其中,PID 控制器以 1e-4 的步长运行,而物理模型用固定步长 1e-5 的求解器来集成。
这样,每仿真一次 StopTime = 1e-4,就得到了“10 步模型响应 + 1 次 PID 更新”之后的 Z Z Z 和 V _ I C 1 V\_IC1 V_IC1,非常符合“每个控制电压需要响应 10 次”的需求。
在 Simulink 里做以下设置
-
Solver
- 打开 Model Settings (Ctrl+E) → Solver
- Type 选 Fixed-step
- Solver 选 ode4 (Runge–Kutta)(或者其他固定步长求解器)
- Fixed-step size 填
1e-5
-
PID Controller
- 双击 PID 块(或 PID Controller),在 Discrete 模式下
- Sample time (Ts) 填
1e-4
-
Rate Transition(可选,但推荐)
- 在 PID 输出和物理模型输入之间加一个 Rate Transition 块,保证两条不同速率信号安全切换。
- 默 1e-4 → 1e-5,不用改参数,Simulink 会自动用最近邻保持。
-
Initial Condition
- 把物理模型里初始化状态的那一支“Initial Condition”块的初值写成变量
x0(工作区定义)。
- 把物理模型里初始化状态的那一支“Initial Condition”块的初值写成变量
-
To Workspace
- 用 To Workspace 块把
outZ(物理模型的 Z)和outV_IC1(PID 输出)导出。
- 用 To Workspace 块把
MATLAB 脚本调用示例
%%—— 预先在 base workspace 定义好初始状态和参考值 ——%%
x0 = [...]; % 初始状态向量
Z_reference = 0; % 参考值恒为 0assignin('base','x0',x0);
assignin('base','Z_reference',Z_reference);%%—— 设置仿真——%%
Ts_ctrl = 1e-4; % 控制器采样周期
Ts_solver = 1e-5; % 求解器步长mdl = 'PID';
open_system(mdl);% 1) 全局求解器
set_param(mdl, ...'Solver', 'ode4', ... % 固定步长 RK4'FixedStep', num2str(Ts_solver), ...'StopTime', num2str(Ts_ctrl) % 仿真到一个控制步
);% 2) PID 块采样时间
set_param([mdl '/PID Controller'], ...'SampleTime', num2str(Ts_ctrl) ...
);%%—— 运行仿真 ——%%
simOut = sim(mdl, ...'SrcWorkspace','base', ...'SaveOutput','on', ...'ReturnWorkspaceOutputs','on');%%—— 提取最后一步 ——%%
Z_all = simOut.get('outZ'); % time series
V_IC1_all = simOut.get('outV_IC1');Z = Z_all(end);
V_IC1 = V_IC1_all(end);fprintf('t=%.0e 时刻: Z = %.6f, V_IC1 = %.6f\n', Ts_ctrl, Z, V_IC1);
python 实现
对于相同的求解器初始值,如果 MATLAB PID 和 python PID 的 第一步输出相差一个数量级,最常见的坑就是:

MATLAB PID 块的参数含义可能和你认为的不一样(详见下文 Simulink 中两种 PID 结构中 I 增益的表示)
- Simulink 默认的 PID 块有好几种形式(Parallel / I-form / P-only …),比如,连续时域中 它的 “I 增益” 在 Parallel 形式下 表示的是 K i s \frac{K_i}{s} sKi。如果直接把块里的 “I 增益” 当成 Python 里的 K i K_i Ki,就会差好几倍。
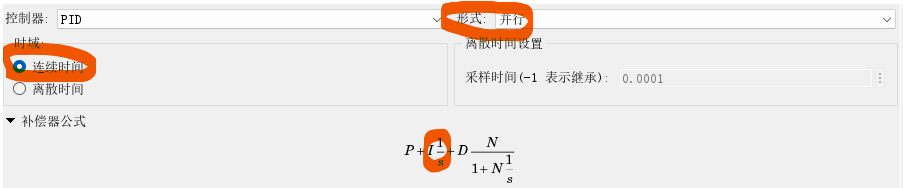
- 检查:双击 Simulink PID 块,看它 是连续时间还是离散时间,是 Parallel 形式还是 I-form,然后 把参数转换成 Python 里的 ( K p , K i , K d , N ) (K_p,\,K_i,\,K_d,\,N) (Kp,Ki,Kd,N) 平行形式。
对号入座,才能在 Python 里准确还原 MATLAB/Simulink 的 PID 积分行为。
离散 PID 实现(并行形式)
Simulink 的离散 PID Controller 块并不是把连续‐时间的
u ( t ) = − ( K p e + K i ∫ e d t + K d e ˙ ) u(t)=-\bigl(K_p e + K_i\!\int e\,dt + K_d\dot e\bigr) u(t)=−(Kpe+Ki∫edt+Kde˙)
简单地用欧拉积分+一阶滤波来近似。它用的是一整套 “ z z z 域” 差分方程:
C ( z ) = P + I T s 1 z − 1 + D N 1 + N T s z − 1 z C(z)\;=\;P \;+\; I\,T_s\frac{1}{z-1} \;+\; D\,\frac{N}{1+N\,T_s}\,\frac{z-1}{z} C(z)=P+ITsz−11+D1+NTsNzz−1
-
积分项
u I [ k ] = u I [ k − 1 ] + I T s e [ k ] u_I[k]=u_I[k-1]+I\,T_s\;e[k] uI[k]=uI[k−1]+ITse[k]
-
微分项(带滤波)
令 N d = N T s N_d=N\,T_s Nd=NTs,有y D [ k ] = 1 1 + N d y D [ k − 1 ] + K d N d 1 + N d ( e [ k ] − e [ k − 1 ] ) y_D[k] =\frac{1}{1+N_d}\,y_D[k-1] \;+\;\frac{K_d\,N_d}{1+N_d}\bigl(e[k]-e[k-1]\bigr) yD[k]=1+Nd1yD[k−1]+1+NdKdNd(e[k]−e[k−1])
-
总输出
u [ k ] = K p e [ k ] + u I [ k ] + y D [ k ] u[k] = K_p\,e[k] + u_I[k] + y_D[k] u[k]=Kpe[k]+uI[k]+yD[k]
而如果在 Python 里用的是连续时间那套,
new_integral = integral + e*dt
derivative = (N*dt*raw_derivative + prev_filtered)/(1+N*dt)
u = Kp*e + Ki*integral + Kd*derivative
它们并不等价。
下面这段代码给出了一个跟 Simulink 离散 PID Controller 块 一模一样的差分实现。它对应于块上方显示的 并行形式,
C ( z ) = P + I T s 1 z − 1 + D N 1 + N T s z − 1 z , C(z)=P \;+\; I\,T_s\frac{1}{z-1} \;+\; D\frac{N}{1+N\,T_s}\frac{z-1}{z}, C(z)=P+ITsz−11+D1+NTsNzz−1,
其中 “积分(I)”框里显示的就是 I T s I\,T_s ITs(注意勾选),所以在代码里直接用它来做积分增量。积分输出 和 最终的控制量 都被 钳位在 [ − V l i m , V l i m ] [-V_{\rm lim},\,V_{\rm lim}] [−Vlim,Vlim] 以内。
P P P 项没有啥好说的,首先根据上面说的实现 I I I 项,
# 内部状态
self.uI = 0.0 # 上一步积分项 u_I[k-1]
self.yD = 0.0 # 上一步滤波微分 y_D[k-1]
self.e_prev = 0.0 # 上一次误差 e[k-1]
# 积分项(差分形式)
uI_candidate = self.uI_prev + self.Ki * error # use I*Ts in simulink
# Anti-windup: limit integral term 将 integral 限在 [-V_lim, +V_lim]
uI_candidate = torch.clamp(uI_candidate, -self.V_lim, self.V_lim)
注意,在 Simulink 离散 PID Controller 块中,积分项的更新总是滞后一拍,它遵循“先用上一步(或初始)的状态算输出,再更新状态” 的时序。
可以在 MATLAB 中只打开 I 控制器实验,会发现第一步的控制器输出为 0。
- 初始时刻 t = 0 t=0 t=0 的输出
- 块会先把“初始积累值” u I [ 0 ] u_I[0] uI[0](默认由 Integrator Initial Condition 参数决定,缺省为 0)和“初始滤波值” y D [ 0 ] y_D[0] yD[0](同样缺省为 0)带入控制律中。
- 此时即便误差 e [ 0 ] ≠ 0 e[0]\neq0 e[0]=0,积分项 还没有 加上 K i T s ⋅ e [ 0 ] \,K_iT_s\cdot e[0] KiTs⋅e[0] 的那部分增量,因此积分输出项是 0;
- 在第一个采样周期结束( t = T s t=T_s t=Ts)时
- Simulink 才会用 e [ 0 ] e[0] e[0] 来更新积分器:
u I [ 1 ] = u I [ 0 ] + ( K i T s ) e [ 0 ] , u_I[1] = u_I[0] + (K_iT_s)\,e[0], uI[1]=uI[0]+(KiTs)e[0],
并在此刻把新的 u I [ 1 ] u_I[1] uI[1] 参与下一次输出计算。

把 forward() 实现改成这样,就能和 Simulink 保持一致:
# 先用 P项、旧滤波、微分项 计算输出
u_unsat = self.Kp*e + self.uI_prev + self.yD# 再更新积分状态,为下一步准备
uI_candidate = self.uI_prev + self.Ki * error # use I*Ts in simulink
接下来是微分项 D D D 的实现,

# 更新 D 项 —— 前向欧拉离散滤波, 差分方程来源于: yD[k] = yD[k-1] + Ts*( Kd*N*(e[k]-e[k-1])/Ts - N*yD[k-1] )
raw_deriv = (error - self.e_prev) / self.dt
self.yD = self.yD_prev + self.dt * ( self.Kd * self.N * raw_deriv - self.N * self.yD_prev )
Simulink 中两种 PID 结构(并联形式, I-形式)下连续/离散时域里积分增益 I 的表示
先把几个概念理清:
-
连续域的 s s s(拉普拉斯算子)
-
把时间域信号 f ( t ) f(t) f(t) 变换到复频域后,微分 d d t \tfrac{d}{dt} dtd 对应乘以 s s s:
L { x ˙ ( t ) } = s X ( s ) . \mathcal{L}\{\,\dot x(t)\} = s X(s). L{x˙(t)}=sX(s).
-
因此, K i s \dfrac{K_i}{s} sKi 就是“对误差做积分”—— K i K_i Ki 是积分增益,单位大致是“控制量/(误差×秒)”。
-
-
离散域的 1 z − 1 \tfrac{1}{z-1} z−11(差分算子)
-
把时间序列 x [ k ] x[k] x[k] 做 z z z 变换后,
Z { x [ k ] − x [ k − 1 ] } = ( 1 − z − 1 ) X ( z ) ⟹ Z { ∑ i = 0 k x [ i ] } = 1 1 − z − 1 X ( z ) = z − 1 1 − z − 1 X ( z ) . \mathcal{Z}\{\,x[k]-x[k-1]\} = (1 - z^{-1})X(z) \quad\Longrightarrow\quad \mathcal{Z}\Bigl\{\sum_{i=0}^k x[i]\Bigr\} = \frac{1}{1-z^{-1}}X(z) = \frac{z^{-1}}{1-z^{-1}}\,X(z)\,. Z{x[k]−x[k−1]}=(1−z−1)X(z)⟹Z{i=0∑kx[i]}=1−z−11X(z)=1−z−1z−1X(z).
-
换一种常见写法 1 z − 1 = − z − 1 1 − z − 1 \tfrac{1}{z-1} = -\tfrac{z^{-1}}{1-z^{-1}} z−11=−1−z−1z−1,它就对应“累加求和”那一块。离散积分项一般写成
K i T s 1 z − 1 ⟺ u I [ k ] = u I [ k − 1 ] + K i T s e [ k ] . K_i\,T_s\;\frac{1}{z-1} \quad\Longleftrightarrow\quad u_I[k] = u_I[k-1] + K_i\,T_s\,e[k]. KiTsz−11⟺uI[k]=uI[k−1]+KiTse[k].
-
这里 T s T_s Ts 是采样周期,把每步的积分增益拉成了和连续域里 K i / s K_i/s Ki/s 数值等价的 “每步累加” 形式。
-
并联(Parallel) vs 理想(I-Form),use I*Ts 的勾选
| 特性 | 并联(Parallel)形式 | I-Form(Ideal)形式 |
|---|---|---|
| 连续时域公式 | C ( s ) = K p + K i s + K d N 1 + N 1 s C(s)=K_p + \dfrac{K_i}{s} + K_d\,\frac{N}{1+N \frac{1}{s}} C(s)=Kp+sKi+Kd1+Ns1N | C ( s ) = K p + K p T i 1 s + K p K d N 1 + N 1 s C(s)=K_p + \dfrac{K_p}{T_i}\,\dfrac{1}{s} + K_p K_d \frac{N}{1+N \frac{1}{s}} C(s)=Kp+TiKps1+KpKd1+Ns1N |
| 离散时域公式 | C ( z ) = K p + K i T s 1 z − 1 + K d N 1 + N T s 1 z − 1 C(z)=K_p + K_i T_s \dfrac{1}{z-1} + K_d \frac{N}{1 + N T_s\frac{1}{z-1}} C(z)=Kp+KiTsz−11+Kd1+NTsz−11N | C ( z ) = K p + K p T s T i 1 z − 1 + K p K d N 1 + N T s 1 z − 1 C(z)=K_p + \dfrac{K_p T_s}{T_i}\,\dfrac{1}{z-1} + K_p K_d \frac{N}{1 + N T_s\frac{1}{z-1}} C(z)=Kp+TiKpTsz−11+KpKd1+NTsz−11N |
| 离散时域差分实现 | u I [ k ] = u I [ k − 1 ] + K i T s e [ k ] \;u_I[k]=u_I[k-1]+K_i\,T_s\,e[k] uI[k]=uI[k−1]+KiTse[k] | u I [ k ] = u I [ k − 1 ] + K p T s T i e [ k ] \;u_I[k]=u_I[k-1]+\tfrac{K_p\,T_s}{T_i}\,e[k] uI[k]=uI[k−1]+TiKpTse[k] |
- 在 离散模式 下,

- 勾选 “Use I*Ts” 时,PID Controller 块中的“积分 (I)”文本框显示的就是 K i T s K_i\,T_s KiTs,这个数值直接用于差分方程 u I [ k ] = u I [ k − 1 ] + ( K i T s ) e [ k ] \;u_I[k]=u_I[k-1]+(K_iT_s)\,e[k] uI[k]=uI[k−1]+(KiTs)e[k]。
- 若 不勾选 “Use I*Ts”,文本框则显示纯粹的离散积分增益 K i K_i Ki,块会在后台自动再乘以 T s T_s Ts 来进行积分运算,即等效地使用 K i T s K_iT_s KiTs。
- 在 连续模式 下,无论是否有“Use I*Ts”,文本框显示的都是连续域的积分增益
K i s \dfrac{K_i}{s} sKi 中的 K i K_i Ki,即单位为“控制量/(误差·秒)”的参数。
| 结构类型 | 文本框显示(离散) | 差分方程增量 | Simulink 帮你做的事 |
|---|---|---|---|
| 并联(Parallel) | K i T s K_iT_s KiTs(勾选 Use I*Ts) K i K_i Ki(不勾选) | u I [ k ] = u I [ k − 1 ] + ( K i T s ) e [ k ] \;u_I[k]=u_I[k-1]+(K_iT_s)\,e[k] uI[k]=uI[k−1]+(KiTs)e[k] | 若不勾选,块会自动乘以 T s T_s Ts;勾选则用文本框数值直接累加。 |
| 理想(I-Form) | T i T_i Ti(始终) | u I [ k ] = u I [ k − 1 ] + K p T s T i e [ k ] \;u_I[k]=u_I[k-1]+\tfrac{K_p\,T_s}{T_i}\,e[k] uI[k]=uI[k−1]+TiKpTse[k] | 勾选后内部把 T i T_i Ti 换算为 K p T s T i \tfrac{K_pT_s}{T_i} TiKpTs。 |
根据 MATLAB 官方文档,

【Tip】
- 如果你 已经在 并联下直接获得了离散 K i T s K_iT_s KiTs(比如 Simulink 给你的那一栏),就直接拿来用,不要再二次换算;
在并联(Parallel)结构下,Simulink 参数栏 “积分(I)”框里显示的正是 K i T s K_i\,T_s KiTs(离散)或 K i K_i Ki(连续),直接把 Simulink 中读到的 “积分(I)” 值当做 K i T s K_i\,T_s KiTs(离散)或 K i K_i Ki(连续)使用即可。- 如果是在 理想(I-Form) 下得到一个积分时间 T i T_i Ti,“积分( I )” 填的是 T i T_i Ti,它会自动在内部换算成 K p T s / T i K_pT_s/T_i KpTs/Ti;python 实现需要再用
K i , d i s c r e t e = K p T s T i K_{i,\mathrm{discrete}} = \frac{K_p\,T_s}{T_i} Ki,discrete=TiKpTs
换算成“每步累加增量”。
什么时候用连续域 vs 离散域?
-
如果把整个闭环模型当成一个离散‐时间系统 —— 比如用
x k + 1 = e A T s x k + A − 1 ( e A T s − I ) B u k x_{k+1} = e^{A\,T_s}\,x_k \;+\; A^{-1}(e^{A\,T_s}-I)\,B\,u_k xk+1=eATsxk+A−1(eATs−I)Buk
这样的精确离散更新公式(基于矩阵指数)来推进状态,那么整个控制器的设计、仿真与实现,就更自然地放在离散时域里:
- 在每个采样点 k k k 计算误差 e [ k ] e[k] e[k],更新离散 PID 差分方程,输出 u k u_k uk,然后用上面的公式算 x k + 1 x_{k+1} xk+1。
- 这时把 Simulink 里“并联形式”的离散 PID 差分方程直接拿过来用,就保证“数值上一致”。
- 连续域的 K i / s K_i/s Ki/s 并不直接作用于这个仿真步长里,它只是一个设计思想——真正跑的时候都要离散化。
-
如果你打算在连续‐时间下设计 PID(比如先用频域调参工具、根轨迹、Bode 曲线,得到 K i , K p , K d K_i,K_p,K_d Ki,Kp,Kd),再把它离散化(如向后差分、双线性变换 Tustin 法、零阶保持 ZOH),那么就先在连续时域下选好参数,然后再用某种离散化方法转换成离散差分形式。



















