基于STM32电子密码锁
(程序+原理图+PCB+设计报告)
功能介绍
具体功能:
1.正确输入密码前提下,开锁并有正确提示;
2.错误输入密码情况下,蜂鸣器报警并短暂锁定键盘;
3.密码可以根据用户需要更改;
4.为防止误操作,更改密码需有两次确认;
5.输出密码错误三次锁死键盘;
6.密码掉电保存功能;

添加图片注释,不超过 140 字(可选)
程序
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "sys.h"
#include "delay.h"
#include "lcd.h"
#include "led.h"
#include "usart.h"
#include "dht11.h"
#include "key.h"
#include "beep.h"
#include <stdio.h>
#include "stmflash.h"
#include "timer.h"
#include "exit.h"
#define ADDR_hum_up_1 0X0800b000
#define ADDR_hum_up_2 0X0800c000
int key=0;
int j=0;
u8 k1_flag=1;
u8 k2_flag=1;
u8 k3_flag=1;
u8 k4_flag=1;
int setpass_flag11=1;//标识正在设置密码,继电器不关闭
int err3_flag=1;
int i=0;
int djtime_flag=360;
int down_flag=0;
static u8 key_up=1;//不支持连按
u8 open_flag=1;//用于标识是否是系统的第一次打开u8 pass_shuru=0;u8 setpassword_flag=0;
u8 setopen_flag=1;//用于标识开机之后是否打开过
u8 setpass_flag=0;//当密码设置成功之后的标志位
u8 err_flag=0;//输出错误次数记录标志位
u8 errtime_flag=0;//用于错误之后延时并重置屏幕的标志位
u8 beep_flag=1;//用于标识当按键按下,蜂鸣器滴一声的时间
u8 password[]={9,9,9,9,9,9};;//记录输入的密码
u8 setpassword1[6]={1,1,1,1,1,1};//设置密码的存放位置
u8 setpassword2[6];//设置密码的存放位置static u8 ok_flag=0;//记录每次判断密码有几位正确
u8 flag16=1;//标志按键16是第几次按下,做相应的动作u8 cspassword[]={0,0,0,0,0,0};
u8 cjpassword[]={1,3,1,4,2,0};u8 table0[]="===Coded Lock===";
u8 table1[]="password: ";
u8 table2[]=" open ";
u8 table3[]=" error ";
u8 table4[]="SetNewWordEnable";
u8 table5[]="input again ";
u8 table6[]="ResetPassword OK";
u8 flash1[]={0};
u8 flash2[]={1,0,0,0,0,0};void show1(void){LCD1602_Show_dat(0,1,table1[0]);LCD1602_Show_dat(1,1,table1[1]);LCD1602_Show_dat(2,1,table1[2]);LCD1602_Show_dat(3,1,table1[3]);LCD1602_Show_dat(4,1,table1[4]);LCD1602_Show_dat(5,1,table1[5]);LCD1602_Show_dat(6,1,table1[6]);LCD1602_Show_dat(7,1,table1[7]);LCD1602_Show_dat(8,1,table1[8]);LCD1602_Show_dat(9,1,table1[9]);for(j=0;j<i;j++){LCD1602_Write_Dat('*');}for(j=0;j<6-i;j++){LCD1602_Write_Dat(' ');}} void show2(void){LCD1602_Show_dat(0,1,table2[0]);LCD1602_Show_dat(1,1,table2[1]);LCD1602_Show_dat(2,1,table2[2]);LCD1602_Show_dat(3,1,table2[3]);LCD1602_Show_dat(4,1,table2[4]);LCD1602_Show_dat(5,1,table2[5]);LCD1602_Show_dat(6,1,table2[6]);LCD1602_Show_dat(7,1,table2[7]);LCD1602_Show_dat(8,1,table2[8]);LCD1602_Show_dat(9,1,table2[9]);LCD1602_Show_dat(0xa,1,table2[10]);LCD1602_Show_dat(0xb,1,table2[11]);LCD1602_Show_dat(0xc,1,table2[12]);LCD1602_Show_dat(0xd,1,table2[13]);LCD1602_Show_dat(0xe,1,table2[14]);LCD1602_Show_dat(0xf,1,table2[15]);}void show3(void){LCD1602_Show_dat(0,1,table3[0]);LCD1602_Show_dat(1,1,table3[1]);LCD1602_Show_dat(2,1,table3[2]);LCD1602_Show_dat(3,1,table3[3]);LCD1602_Show_dat(4,1,table3[4]);LCD1602_Show_dat(5,1,table3[5]);LCD1602_Show_dat(6,1,table3[6]);LCD1602_Show_dat(7,1,table3[7]);LCD1602_Show_dat(8,1,table3[8]);LCD1602_Show_dat(9,1,table3[9]);LCD1602_Show_dat(0xa,1,table3[10]);LCD1602_Show_dat(0xb,1,table3[11]);if(err3_flag==1){LCD1602_Show_dat(0xc,1,table3[12]);LCD1602_Show_dat(0xd,1,table3[13]);LCD1602_Show_dat(0xe,1,table3[14]);LCD1602_Show_dat(0xf,1,table3[15]);}else if(err3_flag==2){LCD1602_Show_dat(0xc,1,0x30+djtime_flag/2/100);LCD1602_Show_dat(0xd,1,0x30+djtime_flag/2/10%10);LCD1602_Show_dat(0xe,1,0x30+djtime_flag/2%10);LCD1602_Show_dat(0xf,1,'s');}}void show4(void){LCD1602_Show_dat(0,1,table4[0]);LCD1602_Show_dat(1,1,table4[1]);LCD1602_Show_dat(2,1,table4[2]);LCD1602_Show_dat(3,1,table4[3]);LCD1602_Show_dat(4,1,table4[4]);LCD1602_Show_dat(5,1,table4[5]);LCD1602_Show_dat(6,1,table4[6]);LCD1602_Show_dat(7,1,table4[7]);LCD1602_Show_dat(8,1,table4[8]);LCD1602_Show_dat(9,1,table4[9]);LCD1602_Show_dat(0xa,1,table4[10]);LCD1602_Show_dat(0xb,1,table4[11]);LCD1602_Show_dat(0xc,1,table4[12]);LCD1602_Show_dat(0xd,1,table4[13]);LCD1602_Show_dat(0xe,1,table4[14]);LCD1602_Show_dat(0xf,1,table4[15]);}void show5(void){LCD1602_Show_dat(0,1,table5[0]);LCD1602_Show_dat(1,1,table5[1]);LCD1602_Show_dat(2,1,table5[2]);LCD1602_Show_dat(3,1,table5[3]);LCD1602_Show_dat(4,1,table5[4]);LCD1602_Show_dat(5,1,table5[5]);LCD1602_Show_dat(6,1,table5[6]);LCD1602_Show_dat(7,1,table5[7]);LCD1602_Show_dat(8,1,table5[8]);LCD1602_Show_dat(9,1,table5[9]);LCD1602_Show_dat(0xa,1,table5[10]);LCD1602_Show_dat(0xb,1,table5[11]);LCD1602_Show_dat(0xc,1,table5[12]);LCD1602_Show_dat(0xd,1,table5[13]);LCD1602_Show_dat(0xe,1,table5[14]);LCD1602_Show_dat(0xf,1,table5[15]);}void show6(void){LCD1602_Show_dat(0,1,table6[0]);LCD1602_Show_dat(1,1,table6[1]);LCD1602_Show_dat(2,1,table6[2]);LCD1602_Show_dat(3,1,table6[3]);LCD1602_Show_dat(4,1,table6[4]);LCD1602_Show_dat(5,1,table6[5]);LCD1602_Show_dat(6,1,table6[6]);LCD1602_Show_dat(7,1,table6[7]);LCD1602_Show_dat(8,1,table6[8]);LCD1602_Show_dat(9,1,table6[9]);LCD1602_Show_dat(0xa,1,table6[10]);LCD1602_Show_dat(0xb,1,table6[11]);LCD1602_Show_dat(0xc,1,table6[12]);LCD1602_Show_dat(0xd,1,table6[13]);LCD1602_Show_dat(0xe,1,table6[14]);LCD1602_Show_dat(0xf,1,table6[15]);}
void mound(void)
{ if(open_flag==1){show1();}else if(open_flag==2){show2();}else if(open_flag==3){show3();}else if(open_flag==4){show4();}else if(open_flag==5){show5();}else if(open_flag==6){show6();}if(key!=240 &&key_up==1){GPIO_SetBits(GPIOC,GPIO_Pin_13);//delay_ms(20);GPIO_ResetBits(GPIOC,GPIO_Pin_13);//key_up=0;if(key>=0 && key<=9){if(pass_shuru==0){if(i==0){password[0]=1;password[1]=3;password[2]=1;password[3]=4;password[4]=2;password[5]=0;}password[i]=key; i++;}else if(pass_shuru==1){if(i==0){password[0]=1;password[1]=3;password[2]=1;password[3]=4;password[4]=2;password[5]=0;}open_flag=1;setpassword1[i]=key;i++;}else if(pass_shuru==2){if(i==0){password[0]=1;password[1]=3;password[2]=1;password[3]=4;password[4]=2;password[5]=0;}open_flag=1;setpassword2[i]=key;if(key==setpassword1[i]){ok_flag++;}i++;}}if(key==13){TIM_Cmd(TIM2, DISABLE);//手动关闭继电器GPIO_ResetBits(GPIOB,GPIO_Pin_0);open_flag=1;pass_shuru=0;}if(key==14){ if(i!=0){i--;}}if(key==15){if(i==6){if(pass_shuru==0){if(setpass_flag==1){for(i=0;i<6;i++){if(password[i]==setpassword1[i]){ok_flag++;}}i=0;
// LCD1602_Show_dat(0,0,0x30+ok_flag/10);
// LCD1602_Show_dat(1,0,0x30+ok_flag%10);if(ok_flag==6){ open_flag=2;ok_flag=0;GPIO_SetBits(GPIOB,GPIO_Pin_0);GPIO_SetBits(GPIOC,GPIO_Pin_13);//TIM_Cmd(TIM2, ENABLE); //使能TIMxsetopen_flag=2;err_flag=0;}else{ok_flag=0;for(i=0;i<6;i++){if(password[i]==cjpassword[i]){ok_flag++;}}i=0;if(ok_flag==6){open_flag=2;ok_flag=0;GPIO_SetBits(GPIOB,GPIO_Pin_0);GPIO_SetBits(GPIOC,GPIO_Pin_13);//TIM_Cmd(TIM2, ENABLE); //使能TIMxsetopen_flag=2;err_flag=0;}else{open_flag=3;ok_flag=0;err_flag++;if(err_flag<3){GPIO_SetBits(GPIOC,GPIO_Pin_13);//TIM_Cmd(TIM4, ENABLE); //使能TIMx}else if(err_flag==3){TIM_Cmd(TIM4, ENABLE);err3_flag=2;}}}}else{for(i=0;i<6;i++){if(password[i]==cspassword[i]){ok_flag++;}}i=0;// LCD1602_Show_dat(0,0,0x30+ok_flag/10);// LCD1602_Show_dat(1,0,0x30+ok_flag%10);if(ok_flag==6){open_flag=2;ok_flag=0;GPIO_SetBits(GPIOB,GPIO_Pin_0);GPIO_SetBits(GPIOC,GPIO_Pin_13);//TIM_Cmd(TIM2, ENABLE); //使能TIMxsetopen_flag=2;err_flag=0; }else{ok_flag=0;for(i=0;i<6;i++){if(password[i]==cjpassword[i]){ok_flag++;}}i=0;if(ok_flag==6){open_flag=2;ok_flag=0;GPIO_SetBits(GPIOB,GPIO_Pin_0);GPIO_SetBits(GPIOC,GPIO_Pin_13);//TIM_Cmd(TIM2, ENABLE); //使能TIMxsetopen_flag=2;err_flag=0;}else{open_flag=3;ok_flag=0;err_flag++;if(err_flag<3){GPIO_ResetBits(GPIOC,GPIO_Pin_13);//TIM_Cmd(TIM4, ENABLE); //使能TIMx}else if(err_flag==3){TIM_Cmd(TIM4, ENABLE);err3_flag=2;}}}}}}else{i=0;open_flag=3;ok_flag=0;err_flag++;if(err_flag<3){GPIO_SetBits(GPIOC,GPIO_Pin_13);//TIM_Cmd(TIM4, ENABLE); //使能TIMx}else if(err_flag==3){TIM_Cmd(TIM4, ENABLE);err3_flag=2;}}}if(key==16){if(GPIO_ReadOutputDataBit(GPIOB,GPIO_Pin_0)){ setpass_flag11=2;if(flag16==1){open_flag=4;pass_shuru=1;flag16=2;i=0;}else if(flag16==2){ open_flag=5;pass_shuru=2;flag16=3;i=0;}else if(flag16==3){i=0;if(ok_flag==6){setpass_flag=1;flash1[0]=setpass_flag;STMFLASH_Write(ADDR_hum_up_1,(u16*)flash1,sizeof(flash1));for(j=0;j<6;j++){flash2[j]=setpassword1[j];}STMFLASH_Write(ADDR_hum_up_2,(u16*)flash2,sizeof(flash2));j=0;open_flag=6;ok_flag=0;TIM_Cmd(TIM2, ENABLE); //使能TIMx}else{open_flag=3;ok_flag=0;TIM_Cmd(TIM4, ENABLE); //使能TIMx }flag16=0;pass_shuru=0;setpass_flag11=1;GPIO_ResetBits(GPIOB,GPIO_Pin_0);}}}}}//void KEY_Scan(void) //实现矩阵键盘。返回值为,各按键的键值,此键值由用户自己定义。
{GPIO_ResetBits(GPIOB,GPIO_Pin_13);GPIO_ResetBits(GPIOB,GPIO_Pin_14);GPIO_ResetBits(GPIOB,GPIO_Pin_15);GPIO_ResetBits(GPIOA,GPIO_Pin_8);if(P5==1 && P6==1 && P7==1&& P8==1){key=240;key_up=1;}else if(key_up==1&&(P5==0 || P6==0 || P7==0 || P8==0)){GPIO_SetBits(GPIOB,GPIO_Pin_14);GPIO_SetBits(GPIOB,GPIO_Pin_15);GPIO_SetBits(GPIOA,GPIO_Pin_8);GPIO_ResetBits(GPIOB,GPIO_Pin_13);if(P5==0 || P6==0 || P7==0 || P8==0) //如果PA8.15.14.13全为0,则没有键按下。此时,返回值为-1.{if(P8==0){key=1;}else if(P7==0){key=2;}else if(P6==0){key=3;}else if(P5==0){key=11;}}GPIO_SetBits(GPIOB,GPIO_Pin_13);GPIO_SetBits(GPIOB,GPIO_Pin_15);GPIO_SetBits(GPIOA,GPIO_Pin_8);GPIO_ResetBits(GPIOB,GPIO_Pin_14);if(P5==0 || P6==0 || P7==0 || P8==0) //如果PA8.15.14.13全为0,则没有键按下。此时,返回值为-1.{if(P8==0){key=4;}else if(P7==0){key=5;}else if(P6==0){key=6;}else if(P5==0){key=12;}}GPIO_SetBits(GPIOB,GPIO_Pin_14);GPIO_SetBits(GPIOB,GPIO_Pin_13);GPIO_SetBits(GPIOA,GPIO_Pin_8);GPIO_ResetBits(GPIOB,GPIO_Pin_15);if(P5==0 || P6==0 || P7==0 || P8==0) //如果PA8.15.14.13全为0,则没有键按下。此时,返回值为-1.{if(P8==0){key=7;}else if(P7==0){key=8;}else if(P6==0){key=9;}else if(P5==0){key=13;}}GPIO_SetBits(GPIOB,GPIO_Pin_14);GPIO_SetBits(GPIOB,GPIO_Pin_13);GPIO_SetBits(GPIOB,GPIO_Pin_15);GPIO_ResetBits(GPIOA,GPIO_Pin_8);if(P5==0 || P6==0 || P7==0 || P8==0) //如果PA8.15.14.13全为0,则没有键按下。此时,返回值为-1.{if(P8==0){key=14;}else if(P7==0){key=0;}else if(P6==0){key=15;}else if(P5==0){key=16;}}}}int main(void)
{BEEP_Init();LED_Init();delay_init(); LCD1602_Init();KEY_Init();NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级TIM2_Int_Init(4999,7199);TIM3_Int_Init(29,35999);TIM4_Int_Init(4999,7199);//每500ms计算一次速度的值,并显示LCD1602_Show_dat(0,0,table0[0]);LCD1602_Show_dat(1,0,table0[1]);LCD1602_Show_dat(2,0,table0[2]);LCD1602_Show_dat(3,0,table0[3]);LCD1602_Show_dat(4,0,table0[4]);LCD1602_Show_dat(5,0,table0[5]);LCD1602_Show_dat(6,0,table0[6]);LCD1602_Show_dat(7,0,table0[7]);LCD1602_Show_dat(8,0,table0[8]);LCD1602_Show_dat(9,0,table0[9]);LCD1602_Show_dat(0xa,0,table0[10]);LCD1602_Show_dat(0xb,0,table0[11]);LCD1602_Show_dat(0xc,0,table0[12]);LCD1602_Show_dat(0xd,0,table0[13]);LCD1602_Show_dat(0xe,0,table0[14]);LCD1602_Show_dat(0xf,0,table0[15]);
// flash1[0]=100;
//STMFLASH_Write(ADDR_hum_up_1,(u16*)flash1,sizeof(flash1));
//STMFLASH_Write(ADDR_hum_up_2,(u16*)flash2,sizeof(flash2));TIM_Cmd(TIM3, ENABLE);STMFLASH_Read(ADDR_hum_up_1,(u16*)flash1,sizeof(flash1));setpass_flag=flash1[0];STMFLASH_Read(ADDR_hum_up_2,(u16*)flash2,sizeof(flash2));for(j=0;j<6;j++){setpassword1[j]=flash2[j];}j=0;open_flag=1;pass_shuru=0;while(1){mound();if(down_flag==2){GPIO_ResetBits(GPIOC,GPIO_Pin_13);}if(down_flag==5){down_flag=0;if(setpass_flag11==2){TIM_Cmd(TIM2, DISABLE);}else{ open_flag=1;pass_shuru=0;GPIO_ResetBits(GPIOC,GPIO_Pin_13);TIM_Cmd(TIM2, DISABLE);GPIO_ResetBits(GPIOB,GPIO_Pin_0);}}if(errtime_flag==2){GPIO_ResetBits(GPIOC,GPIO_Pin_13);}if(errtime_flag==3){GPIO_SetBits(GPIOC,GPIO_Pin_13);}if(errtime_flag==4){GPIO_ResetBits(GPIOC,GPIO_Pin_13);}if(errtime_flag==5){GPIO_SetBits(GPIOC,GPIO_Pin_13);}if(errtime_flag==6){open_flag=1;pass_shuru=0;errtime_flag=0;GPIO_ResetBits(GPIOC,GPIO_Pin_13);TIM_Cmd(TIM4, DISABLE);}}}void TIM2_IRQHandler(void) //TIM2中断
{if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) //检查TIM3更新中断发生与否{TIM_ClearITPendingBit(TIM2, TIM_IT_Update ); //清除TIMx更新中断标志 }down_flag++;}//定时器3中断服务程序
void TIM3_IRQHandler(void) //TIM3中断
{if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查TIM3更新中断发生与否{TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx更新中断标志 }if(err_flag<3){KEY_Scan();}}
*******//完整资料
****//***微信公众号:木子单片机****///定时器4中断服务程序
void TIM4_IRQHandler(void) //TIM4中断
{if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET) //检查TIM3更新中断发生与否{TIM_ClearITPendingBit(TIM4, TIM_IT_Update ); //清除TIMx更新中断标志 }if(err3_flag==1){errtime_flag++;}else if(err3_flag==2){TIM_Cmd(TIM3, DISABLE);if(err_flag==3){open_flag=3;djtime_flag--;if(djtime_flag%2==0){GPIO_ResetBits(GPIOC,GPIO_Pin_13);}else{GPIO_SetBits(GPIOC,GPIO_Pin_13);}if(djtime_flag==0){open_flag=1;pass_shuru=0;err_flag=0;djtime_flag=360;TIM_Cmd(TIM4, DISABLE);TIM_Cmd(TIM3, ENABLE);}}}}#include "sys.h"
#include "usart.h"
//
//如果使用ucos,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_OS
#include "includes.h" //ucos 使用
#endif
//
/***微信公众号:木子单片机****/
// //
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{ int handle; }; FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
_sys_exit(int x)
{ x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{ while((USART1->SR&0X40)==0);//循环发送,直到发送完毕 USART1->DR = (u8) ch; return ch;
}
#endif /*使用microLib的方法*//*
int fputc(int ch, FILE *f)
{USART_SendData(USART1, (uint8_t) ch);while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {} return ch;
}
int GetKey (void) { while (!(USART1->SR & USART_FLAG_RXNE));return ((int)(USART1->DR & 0x1FF));
}
*/#if EN_USART1_RX //如果使能了接收
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记 void uart_init(u32 bound){//GPIO端口设置GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟//USART1_TX GPIOA.9GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9//USART1_RX GPIOA.10初始化GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10 //Usart1 NVIC 配置NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器//USART 初始化设置USART_InitStructure.USART_BaudRate = bound;//串口波特率USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式USART_Init(USART1, &USART_InitStructure); //初始化串口1USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断USART_Cmd(USART1, ENABLE); //使能串口1 }void USART1_IRQHandler(void) //串口1中断服务程序{u8 Res;
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.OSIntEnter();
#endifif(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾){Res =USART_ReceiveData(USART1); //读取接收到的数据if((USART_RX_STA&0x8000)==0)//接收未完成{if(USART_RX_STA&0x4000)//接收到了0x0d{if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始else USART_RX_STA|=0x8000; //接收完成了 }else //还没收到0X0D{ if(Res==0x0d)USART_RX_STA|=0x4000;else{USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;USART_RX_STA++;if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收 } }} }
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.OSIntExit();
#endif
}
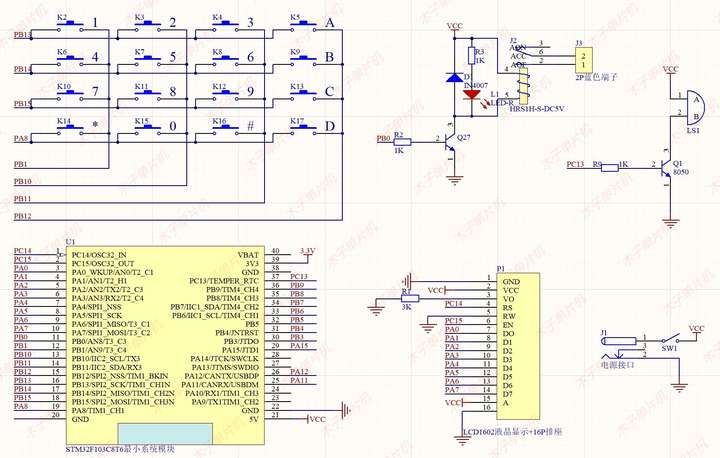
#endif 硬件设计
使用元器件:
单片机:STM32F103C8T6 ;
HRS1H-S-DC5V黄色6腿继电器;
2P蓝色端子;轻触按键;
3mm红色LED;蜂鸣器;
LCD1602液晶屏+16P排座;
8050三极管;3K电阻;
1K电阻;自锁开关;

添加图片注释,不超过 140 字(可选)
流程图:

添加图片注释,不超过 140 字(可选)
设计资料
01原理图
本系统原理图采用Altium Designer19设计,具体如图!
添加图片注释,不超过 140 字(可选)
02PCB
本系统pcb采用Altium Designer19设计,具体如图!

添加图片注释,不超过 140 字(可选)
03程序
本设计使用软件Keil5 MDK版本编程设计!具体如图!

添加图片注释,不超过 140 字(可选)
04设计报告
八千字设计报告,具体如下!

添加图片注释,不超过 140 字(可选)
04设计资料
全部资料包括程序(含注释)、AD原理图、PCB、实物图、任务书、元件清单、结构框图、设计报告、流程图、实物演示视频等。具体内容如下,全网最全! !

添加图片注释,不超过 140 字(可选)
点赞分享一起学习成长。
)
 版本与 LabVIEW 2019 兼容性)



)













