一、现状
在制造业数字化转型浪潮中,传统装配过程仍面临诸多挑战:物理样机试错成本高、装配周期冗长、工艺优化依赖经验、跨部门协作效率低下……如何打破“试错-返工”的恶性循环?
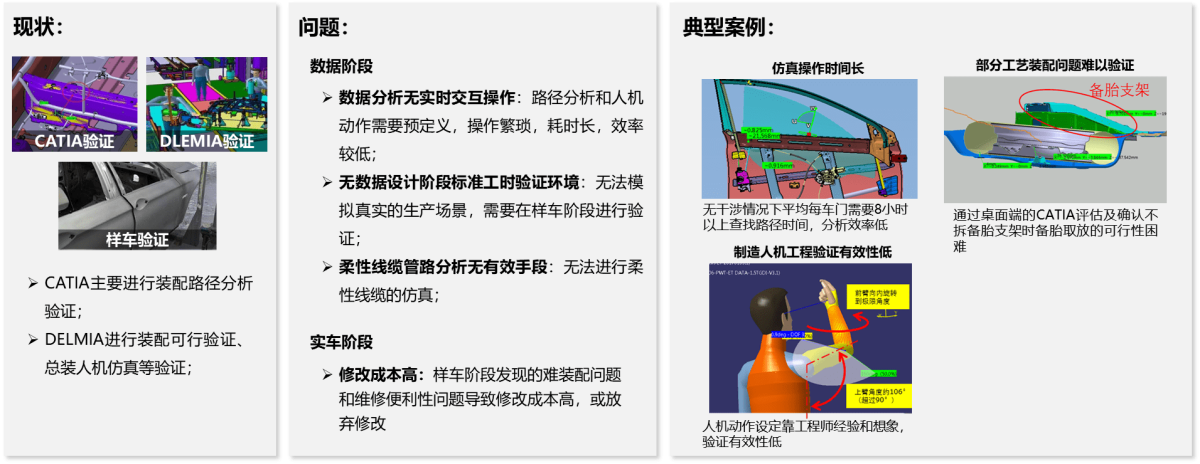
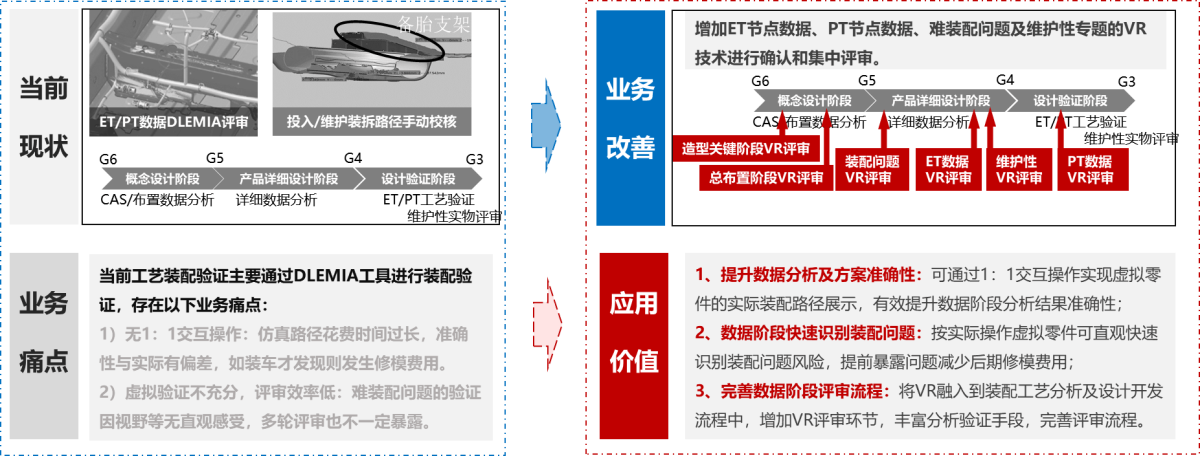
目前总装工艺通过DELMIA、NX、Creo等工程软件进行工艺装配验证。验证方式多是在电脑屏上通过鼠标移动物体坐标轴进行,沉浸感不强,操作过于主观不自然,人机验证效率较低、感知差,导致某些设计问题难以在数据阶段发现。
因此,将虚拟代替真实,以虚拟现实(VR)与数字孪生技术为核心,为制造业提供从设计到生产的全链路装配革新,让装配过程“所见即所得”,开启智能制造的“低成本、零试错”时代。
二、业务需求
大幅缩短研发周期:
可以快速进行样件的装配验证,无需等待实物样件的制作。产品研发和迭代的速度可得到显著提升,从而满足设计方案快速迭代后的装配验证需求。
降低成本:
可以在虚拟模拟阶段进行工艺验证和优化,减少实物样件的制作数量。节省大量的材料成本与人工成本,提高企业的整体竞争力。
实时更新:
设计师可以快速调整设计方案,并实时查看效果。大幅提高设计效率,避免了因实物样件制作周期长而导致的无法快速响应方案变化的 问题。
降低安全隐患:
有效避免新品验证或新手操作不当导致的不可预估的安全风险。同时,验证结束后,可将结果输出,对员工进行培训,提高其操作技能和安全意识。
更具人性化设计:
将操作人员舒适性纳入到工艺装配考虑因素中,提前进行操作人员装配可行性、舒适性、疲劳性分析,优化工器具与结构设计。
三、产品定位
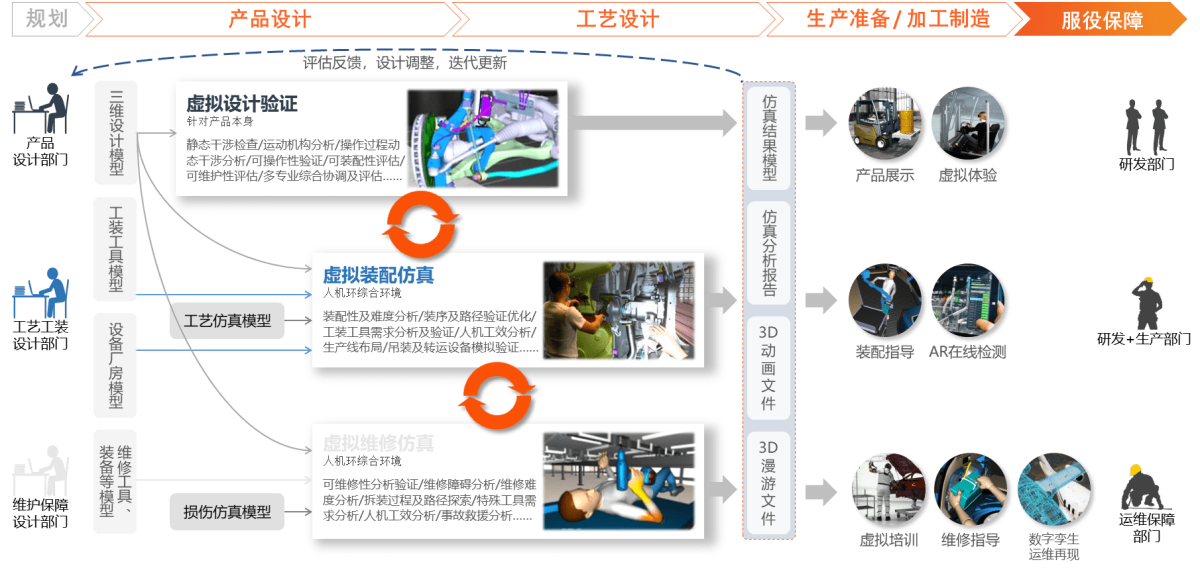
基于产品研发流程中的各重要环节,响应各部门需求。
四、系统方案
系统简介
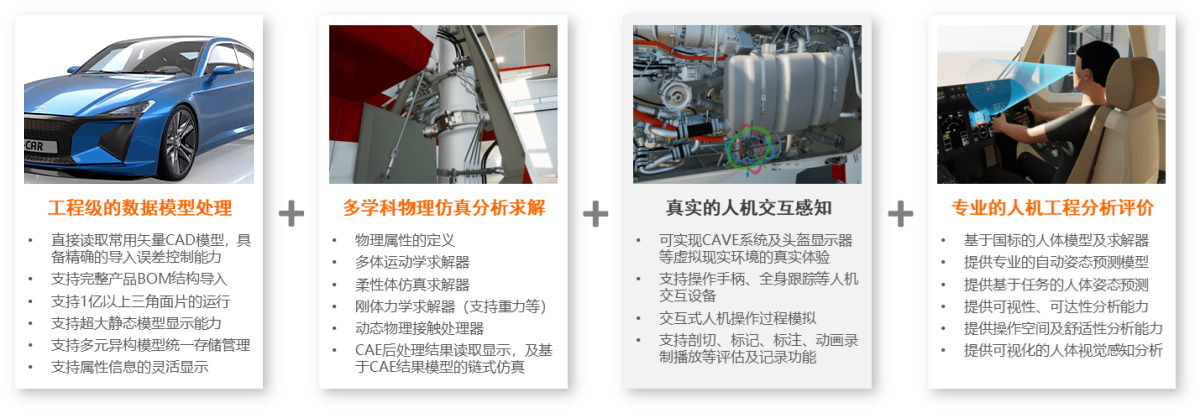
北京和远科技提供的方案通过基于精确几何模型及零部件物理特性的真实模拟,及人机环的综合分析,并结合虚拟现实硬件设备,实现对产品的使用操作、装配过程、维修维护过程的仿真验证,及作为交互式的虚拟协调评价平台。
1. 优势:
兼容大部分工程数据格式,准确保留数据层级关系;
提供高精度装配验证(容差功能,模拟加工误差下的间隙、过渡、过盈装配);
能够提供(圆形截面)柔性线缆的装配验证;
提供多种仿真求解器,提供接近真实的装配仿真结果,包括:多体运动学求解器,刚体力学求解器,动态物理接触处理器,物理光学分析求解器等。(支持重力、惯性、阻力等属性,动态碰撞、推动、干涉检查)
准确的模型
支持十万数量级零部件的高精度模型导入与流畅运行;
支持从设计模型中获取零部件BOM结构、属性信息及质量、质心、惯性积、材料等物理特性。
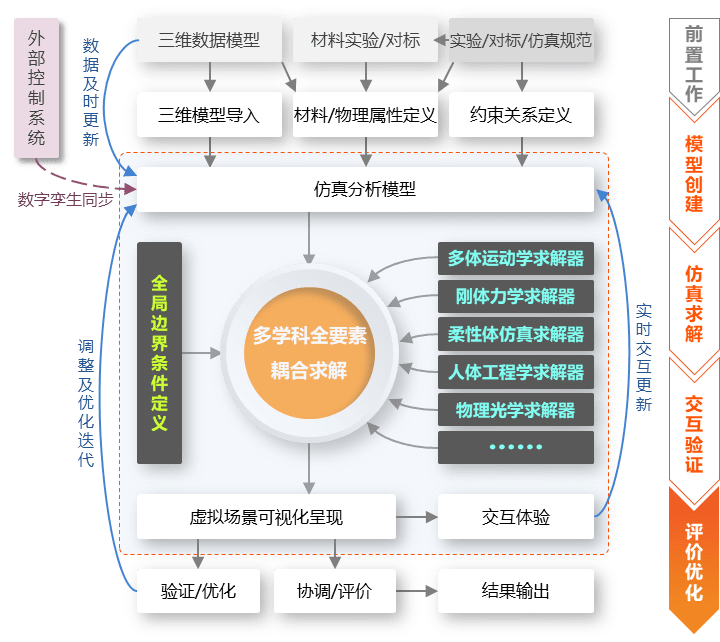
统一的环境
全局的边界条件、零部件的材料物理特性,在所有仿真模拟过程中实时有效;
所有功能均在统一的软件环境下实现联合仿真、耦合求解。
专业求解器
经典、高效的求解算法,通过对标确认仿真结果的可信度;
经过了全球多家大型装备制造业企业充分的工程验证;
达到最接近真实的仿真模拟结果。
真实的体验支持各类通用交互设备,支持人对虚拟零部件的抓握、推动、操控等真实操作体验; 通过交互操作,保证了在人员操作时,零部件对象的真实响应效果。
2. 硬件包含:
立体显示屏:提供沉浸式立体评审环境,模型以1:1比例呈现在眼前,可进行模型结构干涉情况的查看与评审,也可支撑多人参观汇报展示。
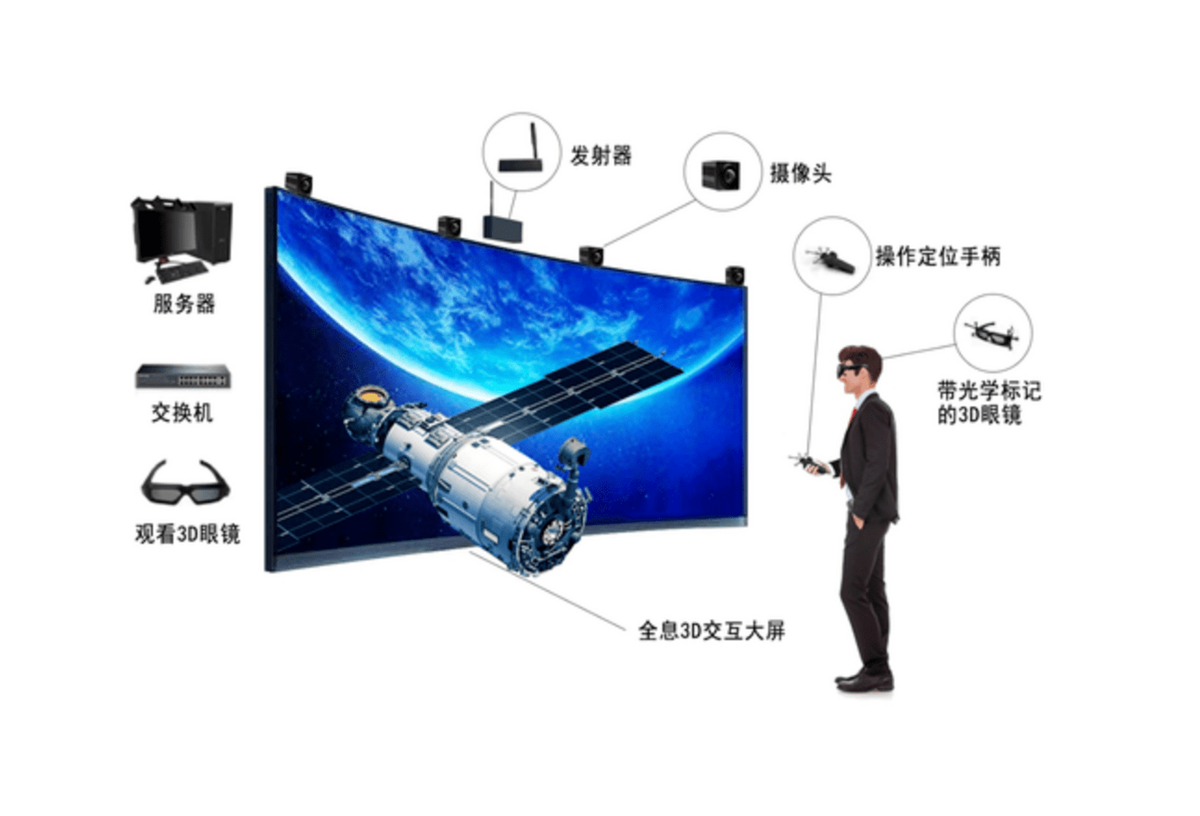
光学空间定位系统:提供高精度的定位追踪能力,在虚拟装配过程中提供人体追踪与样件追踪,提供真实的装配体验;主要包含:定位摄像头、全身动作捕捉套件等。
头戴式显示设备:提供接近人体真实视野的第一人称主视角评审能力;
功能模块简介
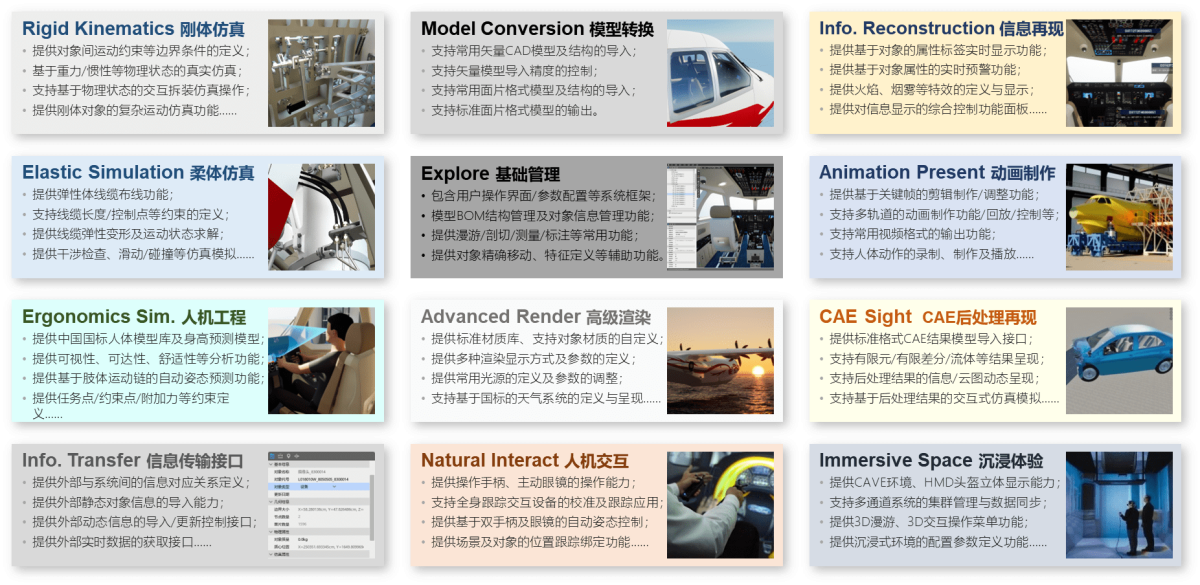
1. Model Conversion 模型转换模块
矢量模型导入的精度控制
支持CATIA、PTC Creo、Siemens NX、SolidWorks、STP、IGS、3dxml等常用矢量CAD文件模型及结构的直接读取;
在矢量模型导入过程中,可定义弦公差、最大边长、最大法线角等多种几何精度导入控制选项;
支持JT、FBX、OBJ、glTF等常用面片格式模型的导入。
零部件BOM结构的完整继承
能够完整导入模型的BOM结构;
能够完整继承各零部件的代号、颜色、材质等信息。
完整便捷的模型处理能力
提供针对BOM结构的调整功能;
提供精确位移、精确装配等模型处理功能;
提供模型拆分、合并、复制、删除等常用模型操作功能。
2. Explore 基础管理模块
操作界面及模型数据管理
便捷的用户操作界面及系统参数配置;
提供设计BOM、仿真BOM等模型结构管理功能;
提供零部件对象属性的自定义及管理功能;
提供各类资源库的管理功能。
常用操作功能的支持
提供场景漫游浏览、模型定位等可视化操作功能;
提供剖切、测量、标注等常用功能;
提供对象捕捉、坐标系、多窗口管理、等系统设置。
导入即使用,无需轻量化及简化处理
轻量化及简化处理的弊端:
轻量化处理将导致仿真模型精确下降;
面片简化将导致零部件物理特性的混乱;
结构简化将导致零部件模型及属性与原始模型的相关性丧失。
3. Rigid Kinematics 刚性运动仿真模块
丰富的边界条件定义功能
支持仿真对象质量、阻尼等仿真属性的定义;
支持转动、滑动、球铰、平面等位置约束条件的定义;
支持齿轮、齿条、涡轮/涡杆等运动约束的定义;
提供重力场、碰撞、阻尼等全局参数控制能力。
专业的多刚体动力学求解器
支持多闭环约束链、嵌套约束链等复杂机构运动的实时求解;
支持零部件运动极限位置的停止、吸附/脱离计算;
支持基于驱动力的多刚体运动实时仿真求解及交互操作;
支持重力场、惯性、碰撞、阻尼等对多刚体运动的耦合求解。
高精度的多体碰撞耦合算法
提供高精度的多刚体碰撞边界求解算法;
支持基于高精度静态及动态干涉检查;
支持与柔性体仿真的耦合求解能力。
4. Elastic Simulation 柔性体仿真模块
支持柔性体管线的创建与布线
支持基于起始/终止点及线缆长度创建管线;
支持线缆控制点的定义;
支持线缆直径、刚度等参数的定义。
基于物理属性的柔性体仿真求解
提供基于物理属性的柔性体仿真求解器;
提供重力场、碰撞等全局参数控制能力;
提供最小弯曲半径等的定义及极限状态的高亮显示。
与其它求解器的实时耦合求解计算
支持与周边刚体的滑动、碰撞等耦合求解计算;
支持与运动部件的位置约束条件的定义;
支持与运动部件的运动变形耦合求解。
5. Ergonomics Simulation 人机工程仿真模块
完整的符合国标的人体模型库
人体模型库中模型完全符合中国现行国家标准;
具备不同性别、不同年龄段、不同百分位的完整人体模板;
提供人体模板库、人体姿态库的管理功能;
提供站姿、坐姿等标准模板;提供头发/鞋子、衣服等选项。
基于任务的姿态预测求解算法
支持基于逆向运动学的人体姿态求解算法;
提供双手、头部、视点的操作任务目标定义;
人体姿态求解算法支持任务目标位置的趋势锁定功能。
丰富的人机工程仿真分析功能
提供人体视锥、视域、视野、视线的分析及结果可视化呈现;
提供人体双手可达性范围分析及结果可视化呈现;
提供基于几何及RULA算法的舒适性分析及结果可视化呈现;
提供人体视野遮挡分析等视觉感知分析及结果可视化呈现。
6. CAE Sight CAE后处理结果再现模块
常用格式的CAE后处理结果的导入
支持有限元、有限差分、流程等多种常用格式的CAE后处理结果的导入功能;
支持CAE后处理结果各类网格节点属性的导入及管理功能。
CAE后处理结果的可视化呈现
支持以云图方式对CAE后处理结果模型进行呈现;
支持对结果模型的材质定义及高级渲染;
支持链式仿真结果模型的播放呈现;
支持CAE后处理结果节点数据的实时获取与呈现。
CAE后处理结果模型的耦合仿真
具备基于CAE后处理结果模型与其它求解器的链式耦合仿真能力;
可将仿真结果与场景中的其它对象、运动状态、假人模型等进行综合呈现。
7. Advanced Render 高级渲染模块
高效便捷的对象材质定义功能
提供了标准材质资源库;
支持对象材质属性参数的自定义功能;
支持对零部件材质的批量赋予操作;
提供了对零部件对象UV坐标、表面法向等的编辑功能。
丰富的渲染环境定义功能
提供了点光源、聚光灯、平行光等常用光源的定义功能;
提供了基于时间系统的光照环境定义功能;
提供了丰富的天气环境系统,支持风云雨雪等常用天气;
提供了海洋、烟雾、火焰等丰富的特效资源库。
实时高质量渲染及全局参数定义
支持全局光照的实时渲染能力;
提供对阴影、反射等渲染算法;
提供对渲染方式、抗锯齿等各类渲染质量的全局控制功能;
支持多窗口视图等显示界面控制功能。
8. Animation Present 动画展示模块
简洁的动画生成方式
支持基于关键帧的零部件运动轨迹剪动画辑制作;
支持零部件运动轨迹的录制;
支持剪辑组的定义与编辑,提供动画剪辑的结构话管理功能;
支持多轨道动画的制作、编辑与回放过程控制等功能。
丰富的动画支持能力
支持零部件运动轨迹动画的定义;
支持零部件可见性、材质等多种动画类型的定义;
支持摄像机动画轨迹的定义;
支持特效运动轨迹及可见性动画类型的定义。
与仿真过程的结合应用
支持机构运动仿真过程的动画录制与回放;
支持人体模型及全身跟踪的动画录制与回放;
支持动画触发器的定义。
9. Natural Interact 人机交互模块
常用人机交互设备的支持
支持ART头部跟踪标记物、双手操作手柄的使用;
支持ART全身跟踪标记物的使用;
支持HTCVIVE、PICO等头盔显示器及跟踪手柄的使用。
提供人机交互设备的操作功能
提供人机交互设备的高精度校准功能;
支持使用操作手柄的场景漫游及对物体的操作功能;
支持全身跟踪标记物对人体模型的跟踪控制功能。
专业的人体姿态跟踪控制
具备高精度的人体跟踪求解算法;
可支持对不同身高、性别人体模型的准确姿态控制;
支持全身跟踪人体动作的录制与回放。
10. Immersive Space 沉浸体验模块
VR沉浸式硬件环境支持
采用沉浸式主动立体3D显示技术;
支持投影机、LED屏、DLP屏、头盔显示器等3D硬件设备;
支持单通道显示、CAVE系统显示、头盔显示等3D显示输出。
丰富的沉浸式环境操作功能
提供3D交互式操作菜单;
提供沉浸式环境的配置参数定义功能;
提供导航方式定义、操作速度等定义功能;
支持头部跟踪与固定视点方式的切换。
完善的硬件环境通讯与控制
支持多通道系统的集群管理功能;
支持各渲染机间的数据同步;
提供针对沉浸式硬件环境的配置能力。
11. Info. Reconstruction 信息再现模块
灵活的对象属性定义与管理能力
提供基于对象类别的属性自定义功能;
提供专门的属性管理界面及信息显示管理界面;
提供基于对象的标签属性特效显示功能;
支持信息显示方式的自定义。
支持多元异构信息的集中呈现
支持对零部件代号、名称、质量等属性的显示;
支持图片、视频流等多媒体数据信息的显示;
提供基于对象属性的实时预警判断及高亮预警显示功能。
丰富的信息集中显示管理面板
提供对信息显示的总体控制面板功能;
支持根据对象类别、信息类型等的筛选显示控制;
支持根据选中对象、触碰对象、距离远近等多种显示方式;
提供对信息显示样式的集中控制。
12. Info. Transfer 信息传输模块
标准化的信息通讯传输接口
提供用于零部件属性及操控信息的API二次开发接口;
提供标准的、可配置的信息同步传输中间件模块。
灵活的信息传输方式
提供外部静态信息的导入功能;
提供外部动态信息的导入/更新控制接口;
提供外部实时数据的获取接口;
提供系统信息逆向输出接口。
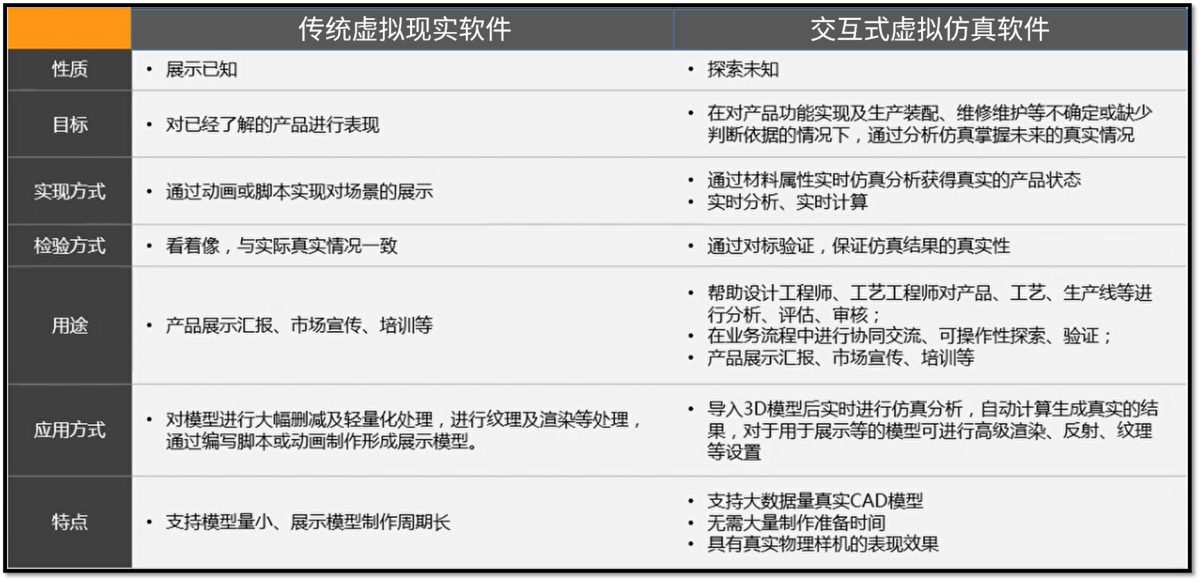
五、传统虚拟现实软件与交互式虚拟仿真软件的对比
六、结论
通过本套虚拟装配解决方案,可为您提供以下核心价值:
高效预演,规避风险
实时碰撞检测、物理仿真引擎,高精度模拟零部件装配路径,提前识别干涉与公差问题,降低50%以上物理样机试错成本。 支持柔性线缆、复杂机构动态仿真,覆盖汽车、航空、工业设备等全场景装配需求。
智能优化,效率倍增
智能算法驱动装配序列规划,自动生成最优装配路径与工艺文档,缩短装配周期30%以上。 沉浸式交互环境+力反馈设备,让工程师“亲手”验证装配可行性,提升设计迭代速度。
跨部门协同,打破信息孤岛
支持设计、制造、生产部门的装配验证需求,实时同步修改与评审,减少70%沟通成本。 支持多人异地协作,通过VR头盔/数据手套实现1:1真实操作,装配工艺秒变“可视化标准”。
数据闭环,驱动持续改进
全程记录装配操作数据,生成人机分析报告,为工艺优化提供精准决策依据。 直接加载CAD模型数据,继承BOM层级关系,与PLM/MES系统无缝集成,形成“设计-仿真-生产”全链路数字化闭环。



)


--字符指针变量,数组指针变量,二维数组传参的本质,函数指针变量,函数指针数组)





流程)

创建型:单例模式详解)




![[NOIP2002 提高组] 均分纸牌](http://pic.xiahunao.cn/[NOIP2002 提高组] 均分纸牌)