一、工作模式
无人机探测器通过多模式协同实现全流程防御闭环:
1. 主动扫描模式
雷达主动探测:发射电磁波(如Ka/Ku波段),通过回波时差与多普勒频移计算目标距离、速度及航向,适用于广域扫描(360°覆盖)。
激光测距辅助:与光电系统联动,提升定位精度(误差≤0.3厘米)。
2. 被动侦听模式
射频信号嗅探:监测2.4GHz/5.8GHz等通信频段,识别无人机遥控链路特征,定位操控者位置。
声纹采集:捕捉螺旋桨噪声频谱(50Hz–20kHz),匹配声学数据库实现无源探测。
3. 智能响应模式
分级反制策略:初级警告(无线电驱离)→ 中级干扰(GPS欺骗)→ 高级毁伤(激光熔毁),响应时间<5秒。
二、技术要点
1. 多传感器融合
数据协同:雷达(远距广域)+ 光电(视觉确认)+ 射频(信号定位)+ 红外(夜间增强),通过卡尔曼滤波与AI算法降低虚警率。
组网定位:多节点三角测量实现三维定位(水平精度≤3°,俯仰精度≤5°)。
2. 智能识别算法
微多普勒分析:识别旋翼旋转特征,区分无人机与鸟类(准确率>90%)。
深度学习模型:CNN分类可见光/红外图像,GRU/LSTM处理时序信号(如声纹)。
3. 抗干扰设计
频率捷变技术:动态跳频规避干扰(如Ku波段)。
窄带定向干扰:精准压制目标频段,避免误伤合法通信。
三、探测方式
按技术原理分为四类主流方式:
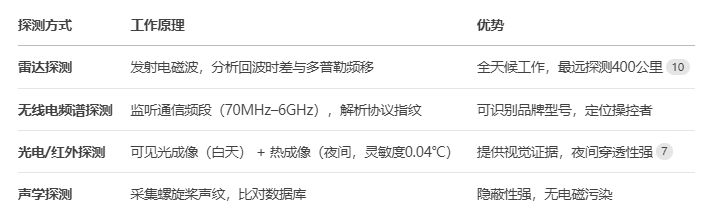
注:现代系统需集成≥2种技术以应对复杂场景,如“雷达+光电”组合可兼顾远距探测与视觉验证。
四、技术难点
1. 复杂环境适应性
电磁干扰:城市多径效应降低定位精度,需空时自适应处理(STAP)抑制杂波。
气象影响:雨雾衰减雷达信号,红外易受日光干扰,需多源数据互补校正。
2. 静默无人机探测
非信号目标:无射频发射的自主飞行无人机需依赖雷达微动特征识别或高分辨率红外热成像(如Skylark ARIES系统突破)。
3. 多目标处理瓶颈
同时追踪>150个目标时,算力需求剧增,需边缘计算本地化处理(响应≤5秒)。
4. 超低空盲区优化
地面杂波干扰雷达近地探测,需优化脉冲压缩技术与俯仰扫描范围(-20°~90°)。
五、模块要点
探测器由四大核心模块构成:


)
-大模型推理部署(分布式推理与量化部署)-大模型评估测试(OpenCompass))






及线程(1))


)
—条件结构)

)
)



)