若该文为原创文章,转载请注明原文出处。
一、 项目背景与引言
(一) 研究背景及意义
道路交通安全是全球性的重大公共安全问题。据统计,绝大多数交通事故源于驾驶员的危险状态(疲劳、分心、健康突发状况)和危险驾驶行为(超速、车距过近)。传统的车辆安全系统如ABS、ESP等属于被动安全范畴,而本项目旨在开发一种主动式的安全预警系统。它通过实时监测驾驶员生理状态、驾驶行为和车辆周边环境,在危险发生前及时向驾驶员发出预警,并能在紧急情况下主动向外界求助,从而有效预防事故的发生,保障驾乘人员及道路其他参与者的生命安全,具有极高的社会价值和现实意义。
(二) 国内外研究现状
目前,此类技术主要应用于高端商用车辆(卡车、客车)和部分高端乘用车中,作为ADAS(高级驾驶辅助系统)的一部分,通常集成在车辆原厂系统中,成本高昂。后装市场的产品功能相对单一,多集中于OBD(车载诊断系统)车速读取或单一疲劳监测。本项目创新性地将驾驶员状态监测(心率血氧)、驾驶行为监测(超速、跟车距离)和远程物联网报警功能集成于一个低成本、可后装的系统中,基于强大的STM32平台开发,提供了更全面的主动安全解决方案。
(三) 论文研究内容
本研究设计并实现了一个以STM32F103C8T6为核心的车辆安全驾驶预警系统。系统通过DHT11监测车内环境;通过霍尔传感器测算车速;通过超声波传感器监测跟车距离;通过MAX30102监测驾驶员心率血氧;通过OLED进行本地信息显示;通过4G CAT.1模块(如AIR724UG)将报警信息和关键数据远程发送到云平台和车主手机;通过按键实现一键报警和设置,最终构建一个多层次、立体的安全防护网。
二、 系统总体设计
(一) 系统架构
本系统是一个典型的嵌入式物联网系统,集感知、控制、通信于一体。
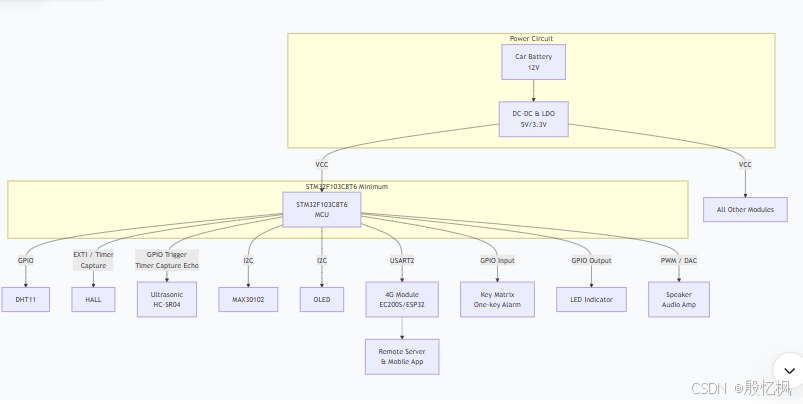
感知层:
环境感知:DHT11温湿度传感器
车辆状态感知:霍尔传感器(车速)
环境感知:HC-SR04超声波传感器(车距)
驾驶员状态感知:MAX30102心率血氧传感器
人工触发:紧急报警按键
控制层:
主控制器:STM32F103C8T6
逻辑判断:执行所有预警算法和逻辑
执行与交互层:
本地预警:语音播报模块(JQ8900)、LED报警灯
本地显示:OLED显示屏(SSD1306)
通信层:
远程通信:4G CAT.1模块(AIR780E)
云平台层:
中国移动OneNet/阿里云等IoT平台,接收数据并转发至手机APP。
(二) 功能模块划分
数据采集模块:负责所有传感器数据的定时采集与滤波。
安全决策模块:核心控制逻辑,根据预设阈值判断当前状态是否安全并触发相应预警。
人机交互模块:包括OLED显示、语音播报、LED报警和按键输入。
远程通信模块:负责通过4G模块与云平台建立连接,传输报警数据和车辆状态。
三、 硬件设计与实现
(一) 主控模块选型及介绍
型号:STM32F103C8T6最小系统板
理由:需要丰富的GPIO和外设(多串口、定时器、ADC)来连接众多传感器和执行器,该型号成本低、性能强、资源完全满足需求。
(二) 传感器模块选型及电路设计
DHT11温湿度传感器:
接口:单总线。数据线接GPIO(如PA0),上拉。
霍尔传感器测速:
原理:将霍尔传感器固定靠近车轮,磁铁固定在车轮上。车轮每转一圈,霍尔传感器产生一个脉冲。
电路:霍尔传感器输出接STM32的GPIO(如PA1,配置为外部中断输入模式),通过计算单位时间内的脉冲数可计算车速。
HC-SR04超声波传感器:
安装:安装于车辆后保险杠,用于监测与后方车辆的距离。
电路:
Trig(PA2),Echo(PA3)。
MAX30102心率血氧传感器:
安装:可集成在方向盘套或指套上,方便驾驶员接触。
接口:I2C。
SCL(PB6),SDA(PB7)。
一键报警按键:
电路:接GPIO(如PA4,配置为上拉输入),按下为低电平。
(三) 通信模块选型及配置
选型:AIR780E(4G CAT.1模块)。相比NB-IoT,CAT.1速率更快,支持TCP/IP协议栈,适合本项目的实时数据上报;相比传统4G,功耗和成本更低。
接口:UART串口。
电路:模块
TXD接MCU的RX1(PA10),RXD接MCU的TX1(PA9),VCC接4.0V~4.2V,需独立供电。
(四) 执行与交互模块
语音播报模块:
选型:JQ8900-16P,可内置“温度过高,请注意”、“您已超速”、“车距过近,请小心”、“驾驶员状态异常,请休息”等语音。
接口:串口。接MCU的另一个UART(如
TX3(PB10))。
LED报警灯:接GPIO(如PC13),用于超速时的闪烁提醒。
OLED显示屏:0.96寸I2C SSD1306,与MAX30102共用I2C总线。
四、 软件设计与实现
(一) 开发环境与协议
IDE:Keil uVision 5
配置工具:STM32CubeMX
库:HAL库
通信协议:HTTP或MQTT(通过4G模块的AT指令实现与云平台的通信)
(二) 系统初始化
初始化系统时钟、GPIO、ADC、I2C、UART(调试串口、4G串口、语音模块串口)。
初始化外部中断(用于霍尔传感器测速)。
初始化所有外设:OLED、DHT11、MAX30102等。
配置4G模块:发送AT指令拨号上网,并连接MQTT服务器。
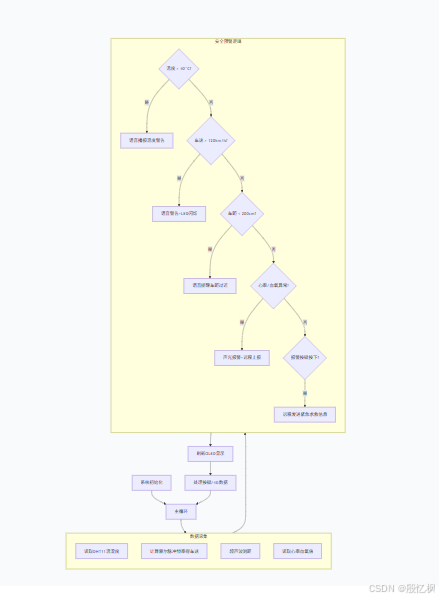
(三) 软件主逻辑流程图
(四) 关键代码片段
主循环核心逻辑
int main() {// 系统初始化System_Init();OLED_ShowWelcome();Voice_Play("系统启动完成"); while (1) {// 1. 采集数据 (每1秒一次)if (HAL_GetTick() - sensor_timer > 1000) {sensor_timer = HAL_GetTick();DHT11_Read(&temperature, &humidity);speed = Calculate_Speed(); // 通过外部中断计数计算车速distance = Get_Ultrasonic_Distance();MAX30102_GetData(&heart_rate, &spo2);}// 2. 安全预警决策// 温度预警if (temperature > TEMP_THRESHOLD) {Voice_Play_Warning(VOICE_TEMP_HIGH);}// 超速预警if (speed > SPEED_THRESHOLD) {Voice_Play_Warning(VOICE_OVERSPEED);LED_Blink(500); // LED每500ms闪烁一次} else {LED_Off();}// 车距预警if (distance < DISTANCE_THRESHOLD && distance > 0) {Voice_Play_Warning(VOICE_TOO_CLOSE);}// 驾驶员状态预警if (heart_rate < HR_LOW || heart_rate > HR_HIGH || spo2 < SPO2_THRESHOLD) {Voice_Play_Warning(VOICE_HEALTH_ALERT);LED_Blink(200); // 快速闪烁// 立即通过4G上报紧急情况MQTT_Publish("driver/alert", "Abnormal vital signs!");}// 3. 一键报警处理 (中断方式)if (emergency_flag) {emergency_flag = 0;Voice_Play_Warning(VOICE_SOS);LED_Blink(100);// 通过4G上报求救信息,包含位置信息(如果集成GPS)MQTT_Publish("car/sos", "EMERGENCY! Driver needs help!");}// 4. 常规数据上报 (每30秒一次)if (HAL_GetTick() - report_timer > 30000) {report_timer = HAL_GetTick();sprintf(mqtt_data, "{\"temp\":%d,\"hum\":%d,\"speed\":%d,\"dist\":%d,\"hr\":%d,\"spo2\":%d}",temperature, humidity, speed, distance, heart_rate, spo2);MQTT_Publish("car/status", mqtt_data);}// 5. 显示刷新OLED_ShowStatus(temperature, speed, distance, heart_rate, spo2);HAL_Delay(100);}
}// 一键报警按键中断服务函数
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) {if (GPIO_Pin == SOS_KEY_Pin) {emergency_flag = 1;}
}// 霍尔传感器脉冲计数中断服务函数
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) {if (GPIO_Pin == HALL_SENSOR_Pin) {pulse_count++;}
}五、 系统测试与优化
(一) 测试方案
实验室测试:
传感器:用热风枪测试DHT11,用磁铁模拟测试霍尔传感器,用障碍物测试超声波,用手指测试MAX30102。
预警逻辑:分别触发各项阈值,测试语音、LED、4G上报是否正常。
实车静态测试:在停放的车辆中安装系统,测试所有功能,尤其是4G网络在车内的连接稳定性。
实车动态测试:在安全道路(如封闭测试场)进行测试,验证车速测量的准确性、车距预警的实时性。
(二) 优化方向
增加GPS模块:在发送求救信息时,附带经纬度坐标,方便精确定位救援。
算法优化:
车距预警:加入相对速度判断,更准确地预测碰撞风险。
疲劳驾驶:通过心率变异性和方向盘微动作(可由加速度计间接判断)综合判断驾驶员是否疲劳。
电源管理:设计汽车电源(12V)转5V/3.3V的电路,实现车辆启动自动上电,熄火延时断电。
数据可视化:开发配套手机APP或Web后台,可视化历史行车数据和安全事件。
六、硬件设计注意事项
抗干扰设计:车辆电气环境恶劣,存在大量电磁干扰。PCB设计时需注意:
电源输入端增加π型滤波和TVS二极管,抑制浪涌和电压瞬变。
信号线尽可能短,关键信号线可考虑包地。
芯片电源引脚附近放置去耦电容。
传感器布局:
霍尔传感器和磁铁安装位置要准确,确保能有效触发。
超声波传感器安装角度需调整至检测区域正后方。
MAX30102需设计成便于驾驶员手指触碰的形式。
4G天线:为4G模块预留天线接口,并确保天线位置靠近车窗或车外,以保证信号质量。
功耗管理:虽然车辆供电充足,但良好的功耗习惯有助于系统稳定性。在不需要全功能运行时,可使STM32进入睡眠模式,由外部事件(如按键、传感器中断)唤醒。
七、 结论与展望
(一) 项目总结
本项目成功设计并实现了一个功能全面、实用性强的车辆安全驾驶预警系统原型。系统有效地将环境监测、车辆状态监测、驾驶员状态监测融为一体,构建了“人-车-环境”三位一体的主动安全防护体系,并通过4G网络实现了数据的远程传输与紧急求助功能。所有预设功能均得到实现,验证了STM32在复杂嵌入式物联网系统中的强大处理能力。
(二) 未来展望
融合计算机视觉:增加一个红外摄像头,用于驾驶员面部识别,实现更准确的疲劳驾驶(打哈欠、闭眼)和分心驾驶(打电话、左顾右盼)检测。
V2X技术:未来可探索集成V2X(车联网)通信,实现车与车、车与路侧基础设施的信息交互,提前感知交叉路口碰撞等更复杂的危险。
自动驾驶集成:将本系统作为ADAS系统的一个感知子模块,为L2/L3级自动驾驶提供决策数据。
UBI保险:系统记录的安全驾驶数据可用于与保险公司合作,为安全驾驶习惯良好的车主提供更优惠的保费(Usage-Based Insurance)。
如有侵权,或需要完整代码,请及时联系博主。
)






——Contextual Chunk Headers(CCH)技术)



)


什么时候引入Seata‘‘)

---slave_net_timeout)


