目录
一、研究背景
二. 核心创新点
2.1 避免高MAC操作
2.2 DSDM-LFIM主干网络
2.3 P2小目标检测分支
3. 代码复现指南
环境配置
关键修改点
4. 实验结果对比
4.1 VisDrone数据集性能
4.2 边缘设备部署
4.3 检测效果可视化
5. 应用场景
6. 总结
一、研究背景
针对无人机(UAV)图像中小目标检测的实时性与边缘部署难题,本文提出SOD-YOLO模型。通过创新设计DSDM-LFIM主干网络和P2小目标检测头,在VisDrone数据集上实现50.7% AP50,推理速度72.5 FPS,参数量降低17.89%,计算量减少20.25%,显著优于YOLOv7!
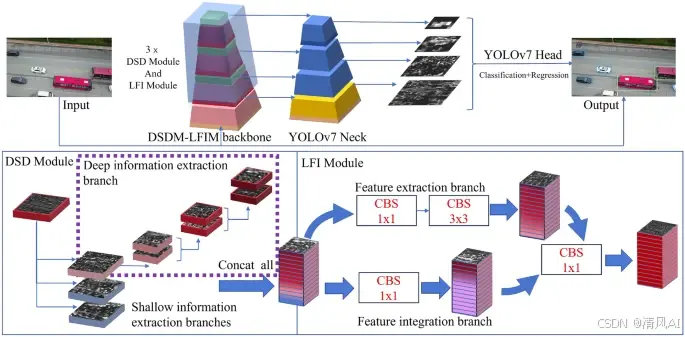
SOD-YOLO 模型结构图




)
)








Day32)

和Windbg工具排查软件高CPU占用问题)
)

