全球知名具身智能/AI机器人实验室介绍之AI FACTORY基于慕尼黑工业大学
TUM AI FACTORY,即KI.FABRIK,是德国慕尼黑工业大学(TUM)在巴伐利亚州推出的一个旗舰项目,旨在打造未来工厂,将传统工厂转变为由人工智能驱动的智能、自适应和敏捷的生产中心。其目标是到2030年,在巴伐利亚地区建立世界上第一个能够通过人工智能实现从单件到批量生产的AI.FACTORY,使工人能够通过AI.PORTALS远程控制机器人完成生产过程,即使在危机时期也能保持经济活动的稳定运行。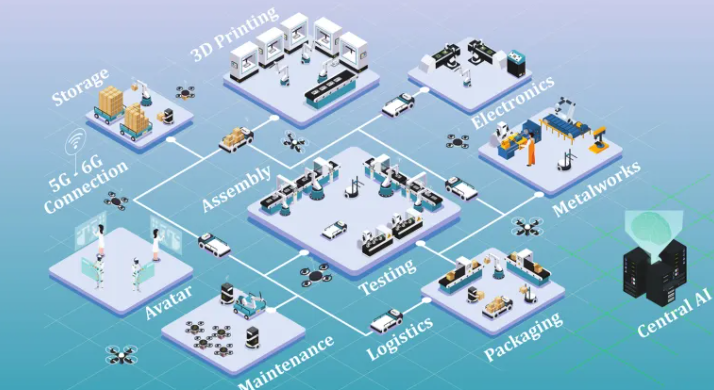
该项目主要设备由20台双臂FRANKA机器人组成,体现了双臂柔性操作的众多优势。Franka机器人中国区域合作商咨询PNP机器人负责,涵盖Franka机器人的培训,渠道和技术支持,支持具身智能/人工智能等方向的实验室建设。
该项目于2020年开始,分为四个部分重叠的阶段进行,部分阶段同时进行。目前正在进行的是第一阶段,即在慕尼黑建立分布式KI.FABRIK的第一个原型,并与精心挑选的合作伙伴公司联合投入运营。KI.FABRIK与以往概念有显著不同,其工厂环境中的中央AI功能可直接与机器人等系统进行物理交互,人类与机器之间的连接也更加直观和透明,例如使用可穿戴技术等。
研究方向
人机协作 :研究如何使人与机器人之间能够更加自然、高效地协作,例如在生产过程中,工人可以通过AI.PORTALS远程控制机器人完成一些复杂的任务,而机器人则可以辅助工人进行重复性或危险性的工作,从而提高生产效率和质量。
智能制造技术 :探索如何利用人工智能、物联网、大数据等先进技术,实现生产过程的智能化和自动化,包括智能排产、质量检测、故障诊断等,以提高生产的灵活性和适应性,满足个性化定制的需求。
机器人技术 :致力于开发具有学习能力和高度适应性的机器人,使其能够通过人工智能算法自我优化和改进,以更好地适应不同的生产任务和环境。例如研究如何提高机器人的运动控制精度、感知能力、决策能力等。
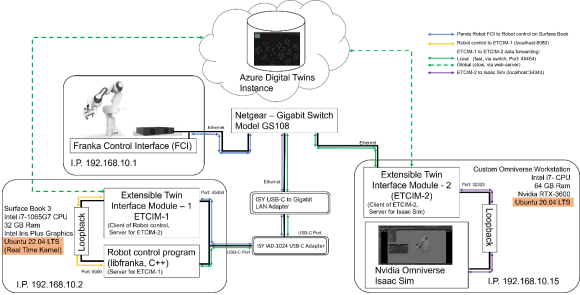
数字孪生技术 :通过创建物理工厂的虚拟副本——数字孪生,实现在虚拟环境中对生产过程进行模拟、优化和预测,从而提高生产的效率和质量,降低成本和风险。在KI.FABRIK中,机器人可以在数字孪生体上进行装配练习,以确定最佳的装配方式。

TUM AI FACTORY中设备
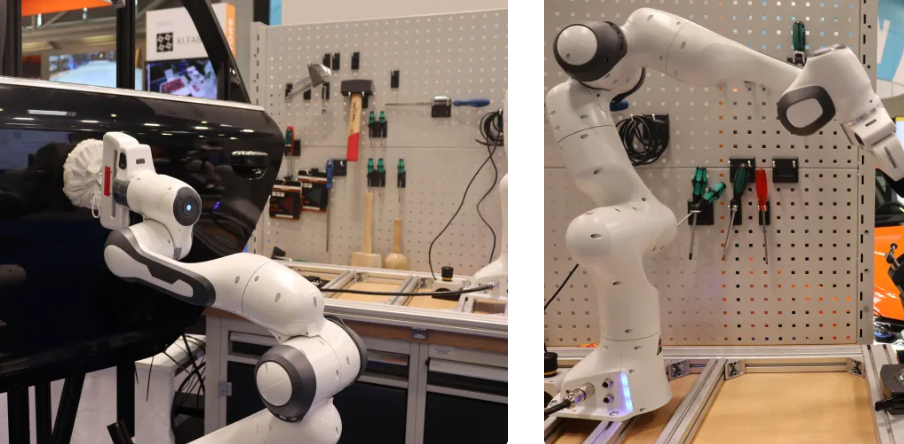
目前有大约20个双臂FRANKA机器人在KI.FABRIK实验室中相互学习,进行电缆和变速器组件的组装等工作
总体方向:
- 25个双臂机器人/每个由AI控制
- 微米公差插入任务
- >100个工业级组件
- 不同的形状和尺寸

每个机器人任务
- 自主学习解决其任务
- 不断分享知识
- 可以获取并传递集体知识
- 柔性部件的智能装配
机器人操作
- 可变形物体的操控(例如电缆)——制造业中常见的、自动化程度不够的流程
- 框架开发——机械臂协作操纵电缆
- 已实现的框架——转移到电缆/线束装配任务的潜力

实时数字孪生
- 使用资产管理外壳、Microsoft Azure 和 Nvidia Omniverse构建工业资产的数字孪生
- 基于套接字通信和 Azure DT 的多功能数字孪生架构
通用机器人技能
- 通过可共享的机器智能知识库,泛化机器人技能,实现灵活的生产线制造。
- 人工智能研讨会旨在构建一个研讨会环境,供用户研究和测试人机协作、力阻抗控制、运动规划和技能学习等主题。
- 用户将体验如何通过触觉技能增强机器人。
机器人看护——从人类观察中学习
- 通过观察学习任务的能力是未来工厂的关键特征,其目标是使高度自动化和智能化的制造系统能够适应不断变化的需求。
- 目标是开发出一种方法,使非专家(就机器人技术而言)人员能够以省时省力的方式重新编程工厂流程。
技能学习
- 通过基于视觉的人体运动追踪,可以通过演示向机器人传授技能。
- 该系统能够分析人类在日常不同环境中的行为,例如,帮助人类完成困难的任务。
AI FACTORY主要设备FRANKA机器人的优势
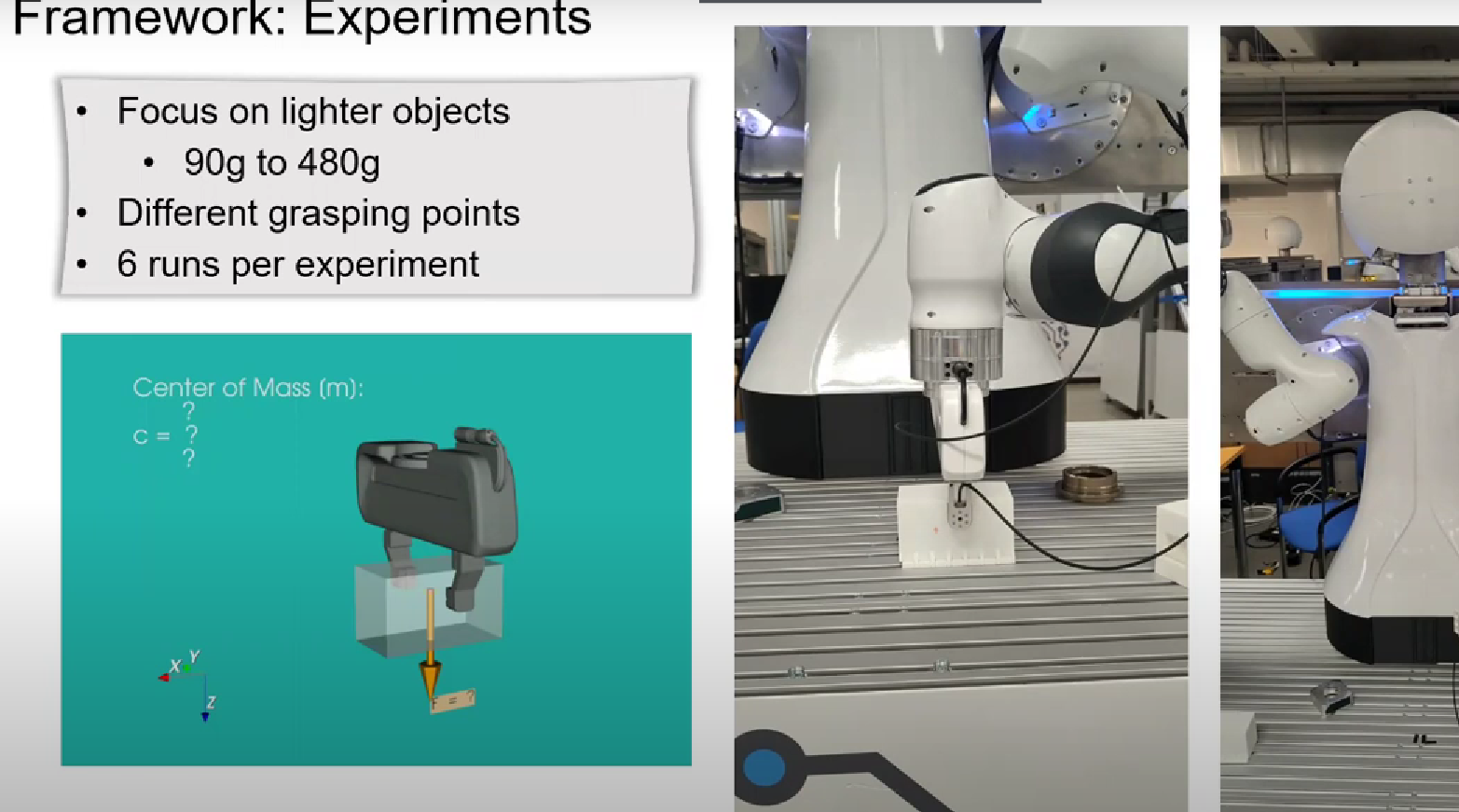
高精度与高灵活性 :FRANK机器人具有7个自由度,重复定位精度高达±0.1mm,能够像人类手臂一样灵活地运动,轻松完成复杂的操作任务,如多角度拧紧、多阶段推注等,其效率较传统方案提升300%。
先进的力控技术 :内置高精度的力矩传感器和1kHz力控带宽,可实时感知接触力的大小和方向,并将这些信息实时传递给操作员,使操作员能够通过VR/AR“触摸”远程环境。同时,具备医疗级柔顺性,力控精度可达±0.01mm,如在手术中可动态适配人体组织等脆弱对象,将手术失误率下降85%,安全系数超行业标准3倍。
强大的人机协作能力 :专为与人类协作而设计,安全性极高。它能够通过先进的传感器和算法实时检测人类的存在,并在必要时自动减速或停止运动,有效保障了人类工人的安全。
高度的可编程性和适应性 :支持多种编程语言和开发环境,如ROS、MATLAB等,开发者可通过C++接口libfranka直接调用底层功能,开发周期缩短60%。此外,还具备模块化即插即用的特点,末端工具标准化,支持快速切换夹爪/焊枪/手术器械等,可根据不同的应用场景进行快速调整和部署。
AI FACTORY为什么要使用FRANKA机器人双臂 :
协同作业能力 :双臂FRANK机器人可以像人类双手一样协同工作,完成复杂的任务。例如,在精密装配任务中,一个手臂可以固定零件,而另一个手臂可以进行拧紧或焊接操作;在物流搬运中,双臂可以共同搬运大型或重型物体,提高搬运效率和稳定性。
更高的灵活性和适应性 :双臂机器人具有更高的灵活性和适应性,能够轻松地在不同的工作场景中切换,完成多种任务。例如,在一个智能工厂中,双臂FRANK机器人可以在一个工作站上完成精密装配任务,然后移动到另一个工作站进行物料搬运或质量检测等。
增强的感知和交互能力 :双臂FRANK机器人配备了先进的传感器和感知系统,如视觉传感器、力传感器等,能够实时感知周围环境的变化,并根据这些变化调整自己的行为。例如,在一个动态的生产环境中,双臂机器人可以感知到工人的位置和动作,以及物体的位置和状态,从而自动调整运动轨迹,避免碰撞和干扰,实现更加自然和高效的交互。
其他设备 :除了FRANK机器人外,TUM AI FACTORY还配备了其他一些先进的设备和系统,如用于创建数字孪生体的建模软件和计算平台、用于数据采集和分析的传感器网络和大数据处理系统、以及支持远程控制和协作的可穿戴设备等。
未来AI智能工厂趋势
高度智能化 :未来智能工厂将以人工智能为核心,实现生产过程的高度智能化和自动化。机器学习、深度学习等人工智能技术将广泛应用于生产过程的各个环节,如预测性维护、质量检测、智能调度等,以提高生产的效率和质量,降低生产成本。
灵活性和适应性 :随着市场需求的日益多样化和个性化,未来智能工厂需要具备高度的灵活性和适应性,能够快速响应市场变化和客户需求。通过采用先进的机器人技术和模块化生产系统,工厂可以轻松地调整生产流程和产品配置,实现小批量、多品种的生产模式。
人机协作的深化 :人机协作将成为未来智能工厂的重要特征之一。机器人将不再是简单的工具,而是与人类工人共同工作的伙伴。通过 intuitive 的界面和自然的交互方式,人类工人可以与机器人进行更加紧密和高效的合作,充分发挥各自的优势,共同完成复杂的生产任务。

AI FACTORY未来规划
慕尼黑工业大学(TUM)推出的 KI.FABRIK(人工智能工厂)项目,代表了未来智能制造的前沿方向。该项目以人工智能(AI)为核心,融合了双臂机器人、数字孪生、可穿戴技术等先进技术,旨在打造一个灵活、高效、人机协作的生产环境。其中,FRANKA Emika 的双臂机器人在实现高精度、柔性制造方面发挥了关键作用。
KI.FABRIK 是 TUM 机器人与机器智能研究所(MIRMI)主导的旗舰项目,旨在建立一个完全灵活、互联的生产基地,用于本地、经济地生产最先进的 IT 和机电高科技组件。该项目计划于 2030 年前完成原型工厂的建设 项目的核心理念是通过 AI 技术,实现机器人与人类的直接物理交互,以及通过可穿戴技术实现人机之间的直观和透明的连接 。这标志着从传统的“自动化”向“智能化”制造的转变。
PNP机器人原创,转载请申请授权。



)











PLC 顺控程序转换条件解读)
)

:基础类型)
