一、酶作用优化算法
酶作用优化(Enzyme Action Optimizer, EAO)算法是一种2025年提出的新型仿生优化算法,灵感源于生物系统中酶的催化机制,发表于JCR 2区期刊《The Journal of Supercomputing》。其核心思想是模拟酶与底物的特异性结合、催化反应及动态适应过程,通过平衡搜索空间的探索与开发,实现复杂优化问题的高效求解。
1. 核心机制与数学建模
-
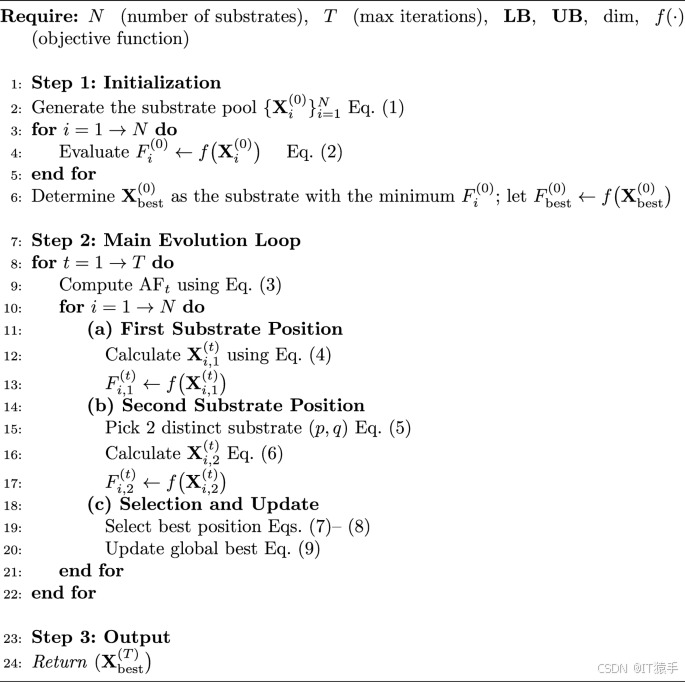
初始化:搜索代理(模拟“底物”)在解空间内随机初始化,位置满足:
Xi(0)=LB+(UB−LB)⊙ri\mathbf{X}_i^{(0)} = \text{LB} + (\text{UB} - \text{LB}) \odot \mathbf{r}_iXi(0)=LB+(UB−LB)⊙ri
其中LB\text{LB}LB和UB\text{UB}UB为变量上下界,ri\mathbf{r}_iri为(0,1)(0,1)(0,1)区间随机向量,⊙\odot⊙表示元素乘法。初始适应度通过目标函数f(Xi(0))f(\mathbf{X}_i^{(0)})f(Xi(0))评估,最优初始位置记为Xbest(0)\mathbf{X}_{\text{best}}^{(0)}Xbest(0)。 -
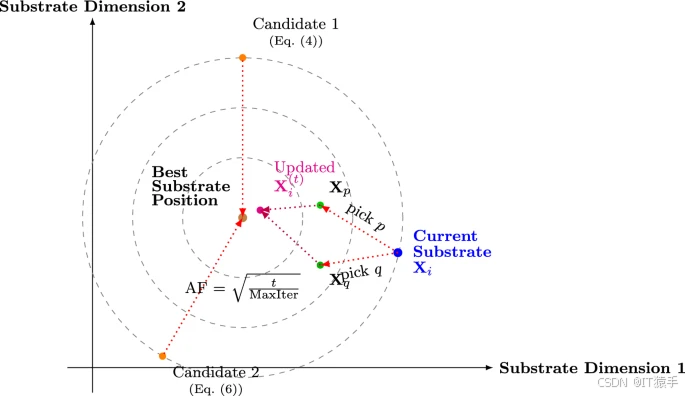
自适应因子(AF):随迭代动态调整,平衡探索与开发:
AFt=tMaxIter\text{AF}_t = \sqrt{\frac{t}{\text{MaxIter}}}AFt=MaxItert
其中ttt为当前迭代,MaxIter\text{MaxIter}MaxIter为最大迭代次数,确保后期逐步聚焦局部搜索。 -
候选位置生成:每次迭代中,每个底物生成两个候选位置:
- 基于当前最优解(模拟“酶”)的定向搜索:
Xi,1(t)=(Xbest(t−1)−Xi(t−1))+ρi⊙sin(AFt⋅(Xbest(t−1)−Xi(t−1)))\mathbf{X}_{i,1}^{(t)} = (\mathbf{X}_{\text{best}}^{(t-1)} - \mathbf{X}_i^{(t-1)}) + \rho_i \odot \sin(\text{AF}_t \cdot (\mathbf{X}_{\text{best}}^{(t-1)} - \mathbf{X}_i^{(t-1)}))Xi,1(t)=(Xbest(t−1)−Xi(t−1))+ρi⊙sin(AFt⋅(Xbest(t−1)−Xi(t−1)))
其中ρi\rho_iρi为随机向量,正弦函数引入波动以增强探索。 - 基于随机底物差异的多样化搜索:
Xi,2(t)=Xi(t−1)+sc1d+AFt⋅sc2(Xbest(t−1)−Xi(t−1))\mathbf{X}_{i,2}^{(t)} = \mathbf{X}_i^{(t-1)} + sc_1 \mathbf{d} + \text{AF}_t \cdot sc_2 (\mathbf{X}_{\text{best}}^{(t-1)} - \mathbf{X}_i^{(t-1)})Xi,2(t)=Xi(t−1)+sc1d+AFt⋅sc2(Xbest(t−1)−Xi(t−1))
其中d\mathbf{d}d为两个随机底物的位置差,sc1,sc2sc_1, sc_2sc1,sc2为缩放因子(受酶浓度参数EC\text{EC}EC调控)。
- 基于当前最优解(模拟“酶”)的定向搜索:
-
更新策略:选择适应度更优的候选位置更新底物,同时更新全局最优解Xbest\mathbf{X}_{\text{best}}Xbest,确保解始终在可行域内。
2. 算法特点
EAO通过模拟酶的自适应催化特性,动态平衡广域探索(随机扰动)与局部开发(定向收敛),在多维复杂优化问题中表现出良好的收敛速度与鲁棒性。其核心优势在于利用酶-底物相互作用的特异性,实现对优质解区域的精准挖掘。
参考文献
[1]Rodan, A., Al-Tamimi, AK., Al-Alnemer, L. et al. Enzyme action optimizer: a novel bio-inspired optimization algorithm. J Supercomput 81, 686 (2025). https://doi.org/10.1007/s11227-025-07052-w.
二、多目标酶作用优化算法
针对单目标优化问题,酶作用优化算法已显示出其有效性。然而,在面对多目标优化问题时,需要一种能够同时处理多个冲突目标的算法。因此,本文提出多目标加权平均算法(Multi-objective Enzyme Action Optimizer, MOEAO)。
为了评估MOEAO的性能,我们将其应用于一组标准的基准测试函数,这组函数包括MaF1-MaF15及工程应用—盘式制动器设计。这些函数在测试多目标优化算法的效率方面被广泛采用。此外,为了全面评估算法的收敛性和解的多样性,我们使用了六种不同的性能度量指标:GD、IGD、HV、Spacing、Spread和Coverage。通过这些指标的综合分析,我们可以有效地评估该算法在处理多目标优化问题时的整体性能。
盘式制动器设计的数学模型如下:

MOEAO算法的执行步骤可以描述如下:

2.1、六种性能评价指标介绍
-
GD(Generational Distance)世代距离:
GD指标用于评价获得的帕累托前沿(PF)和最优帕累托前沿之间的距离。对于每个属于PF的解,找到与其最近的最优帕累托前沿中的解,计算其欧式距离,GD为这些最短欧式距离的平均值。GD值越小,代表收敛性越好,找到的PF与最优帕累托前沿越接近。 -
IGD(Inverted Generational Distance)逆世代距离:
IGD与GD相似,但同时考虑了多样性和收敛性。对于真实的最优帕累托前沿中的每个解,找到与其最近的PF中的解,计算其欧式距离,取平均值而不需开方。如果PF的数量大于最优帕累托前沿的数量,那么IGD就能最完整地表达PF的性能,IGD值越小,代表算法多样性和收敛性越好。 -
HV(Hypervolume)超体积:
HV也称为S metric,用于评价目标空间被一个近似集覆盖的程度,是最为普遍的一种评价指标。需要用到一个参考点,HV值为PF与参考点之间组成的超立方体的体积。HV的比较不需要先验知识,不需要找到真实的帕累托前沿。如果某个近似集A完全支配另一个近似集B,那么A的超容量HV会大于B,因此HV完全可以用于Pareto比较。 -
Spacing:
Spacing是衡量算法生成的非支配解集中各个解之间平均距离的指标。Spacing值越小,表示解集内部的解越密集,多样性越高。 -
Spread:
Spread指标衡量算法生成的非支配解集在Pareto前沿上的分散程度。高的Spread值意味着解集在前沿上分布得更均匀,没有聚集在某个区域。 -
Coverage:
Coverage指标衡量一个算法生成的Pareto前沿覆盖另一个算法生成的Pareto前沿的比例。如果算法A的Coverage指标高于算法B,那么意味着算法A生成的Pareto前沿在某种程度上包含了算法B生成的Pareto前沿。
2.2、部分MATLAB代码
%% 参数说明
%testProblem 测试问题序号
%Name 测试问题名称
%dim 测试问题维度
%numObj测试问题目标函数个数
%lb测试问题下界
%ub测试问题上界
%SearchAgents_no 种群大小
%Max_iter最大迭代次数
%Fbest 算法求得的POF
%Xbest 算法求得的POS
%TurePF 测试问题的真实pareto前沿
%Result 评价指标
testProblem=2;
[Name,dim,numObj,lb,ub]=GetProblemInfo(testProblem);%获取测试问题的相关信息
SearchAgents_no=200;%种群大小
Max_iter=200;%最大迭代次数
[Fbest,Xbest] = MOWAA(Max_iter,SearchAgents_no,Name,dim,numObj,lb,ub);%算法求解2.3、部分结果








 和 稀疏点云重建的详细步骤:)


)





)
:Tomcat高版本URL特殊字符限制问题解决方案(RFC 7230 RFC 3986))


)


)


