文章目录
- 关于项目
- RVIZ控制Gazebo Harmonic仿真机械臂
- GraphExecuter创建流程并通过Yolo算法抓取螺栓
关于项目

本文介绍ros2与gazebo harmonic机械臂仿真项目Moveit2YoloObb优化的内容,具体的代码细节就不赘述了,主要还是演示效果,包括RVIZ控制Gazebo Harmonic仿真机械臂的运动、GraphExecuter创建流程并通过Yolo算法抓取螺栓。
基于ros2 gazebo harmonic的YOLO机械臂优化
RVIZ控制Gazebo Harmonic仿真机械臂
❇️运行仿真环境
cd ros2_project
source install/setup.bash
ros2 launch panda_moveit_config gazebo.launch.py
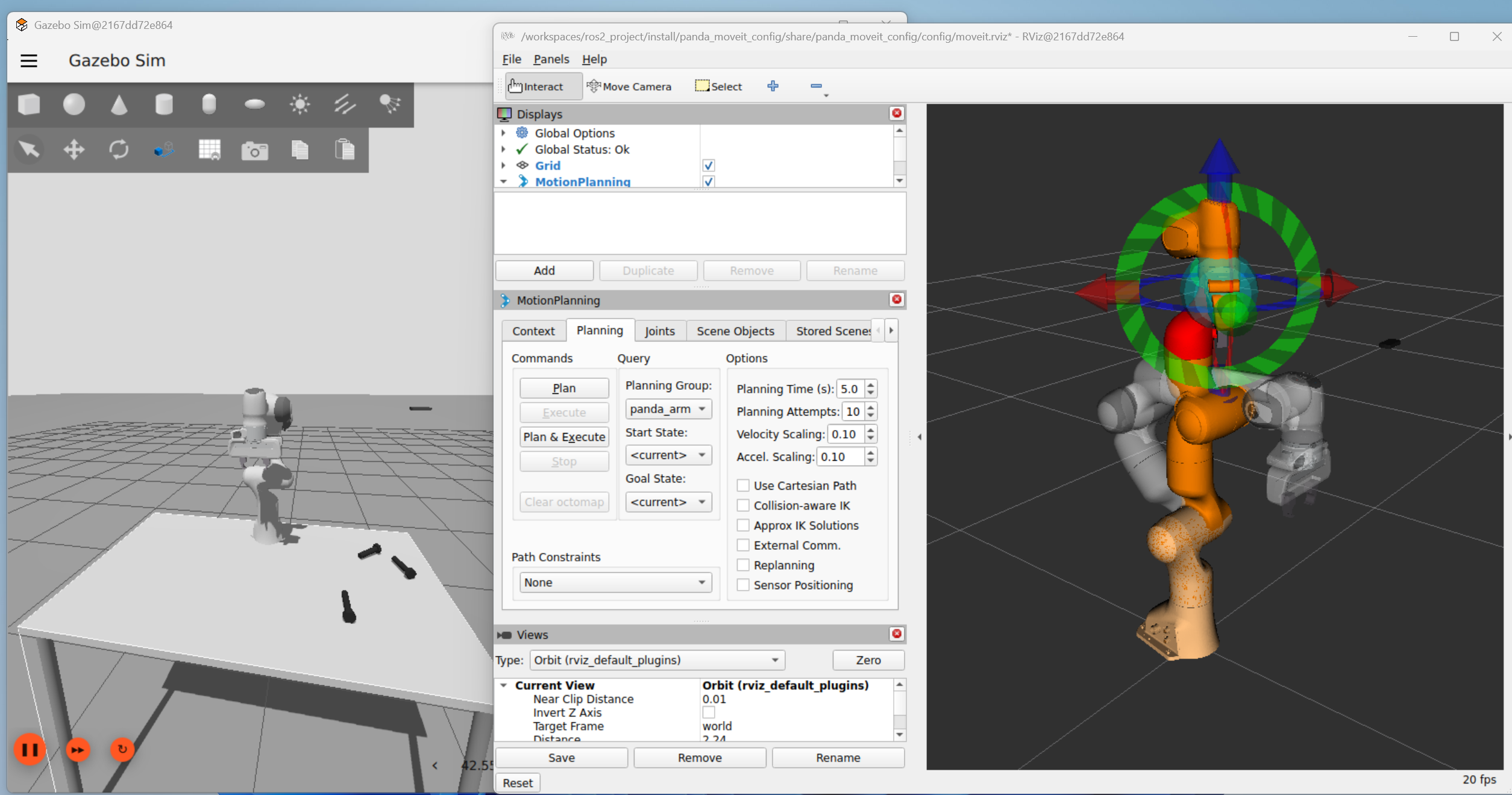
❇️控制机械臂运动
❇️控制夹爪运动
GraphExecuter创建流程并通过Yolo算法抓取螺栓
❇️在前面环境基础下,运行GraphExecuter
# ShellB
cd GraphExecuter/graph_executer
source /workspaces/ros2_project/install/setup.bash
python3 main.py
❇️打开控制服务
# ShellC
cd ros2_project
source install/setup.bash
ros2 launch yolov8_obb yolov8_obb.launch.py
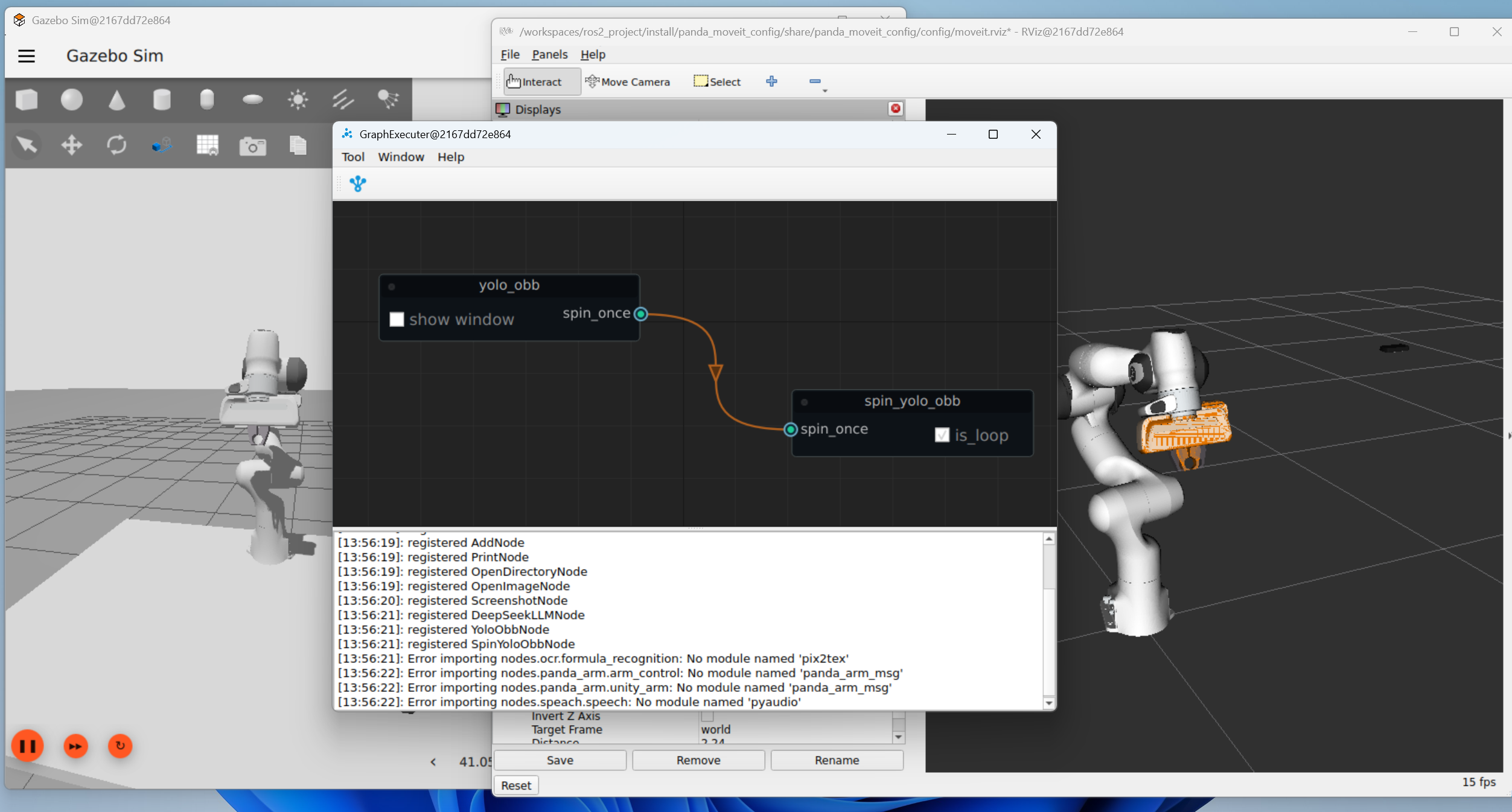
❇️调整一下窗口大小,并运行服务
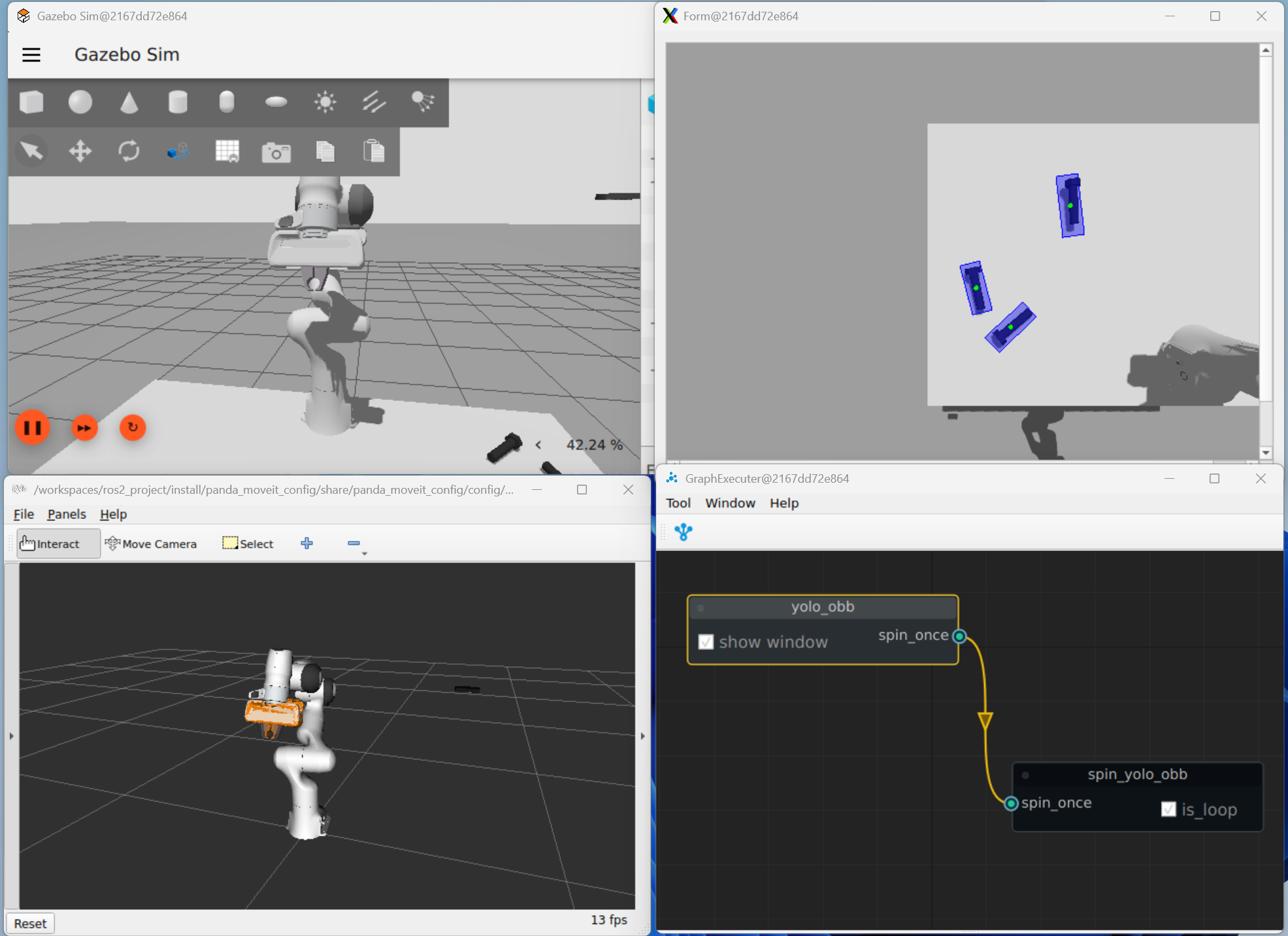
❇️抓取螺栓




(健康生活是coder抒写优质代码的前提条件——《黄帝内经》伴读学习纪要))



:配置项全景解析——打造你的专属优化清单)



使用 vConsole调试console)



)


