在数字图像处理领域,形态学操作是一套基于图像形状的非线性处理方法,核心是通过结构元素(Kernel) 与图像进行交互,实现对图像轮廓、细节的调整与提取。OpenCV 作为主流的计算机视觉库,提供了丰富的形态学操作 API,本文将从原理到代码实战,详细讲解 7 种核心形态学操作(腐蚀、膨胀、开运算、闭运算、梯度运算、顶帽、黑帽),帮助你快速掌握并应用于实际项目。
一、形态学操作基础:结构元素(Kernel)
在开始所有操作前,必须先理解结构元素(Kernel) 的概念 —— 它是形态学操作的 “工具”,本质是一个指定大小的矩阵(通常为奇数,如 3×3、5×5),矩阵元素值通常为 1(表示参与运算的区域)。
结构元素的大小和形状直接影响操作效果:
- 大小:3×3 适用于精细处理,5×5 及以上适用于更显著的形态改变;
- 形状:除了代码中常用的 “矩形(np.ones ())”,还有圆形、十字形等(可通过
cv2.getStructuringElement()生成,例如cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5,5))生成 5×5 圆形结构元素)。
代码中生成 3×3 矩形结构元素的方式:
import numpy as np
kernel = np.ones((3, 3), np.uint8) # 数据类型必须为uint8(无符号8位整数,符合图像像素0-255的范围)
二、核心形态学操作实战
以下所有操作均基于 OpenCV-Python 实现,需提前安装依赖(pip install opencv-python numpy)。每个操作将从 “原理”“作用”“代码”“效果分析” 四部分展开,确保你知其然也知其所以然。
1. 图像腐蚀(Erosion):“收缩” 前景目标
原理
腐蚀是最基础的形态学操作之一,核心逻辑是 **“结构元素滑动遍历图像,仅当结构元素完全覆盖前景区域(通常为白色像素)时,中心像素才保留为前景,否则变为背景(通常为黑色像素)”**。可以形象理解为 “用结构元素‘啃食’前景的边缘,让前景区域逐渐缩小”。
作用
- 消除图像中的细小噪声(噪声多为孤立的小前景像素,会被结构元素直接 “啃掉”);
- 缩小前景目标尺寸,断开相邻目标间的细小连接;
- 突出前景目标中的孔洞(孔洞周围的前景被腐蚀后,孔洞会更明显)。
OpenCV API 参数
cv2.erode(src, kernel, dst=None, anchor=None, iterations=1, borderType=None, borderValue=None)
关键参数解析:
src:输入图像(推荐灰度图或二值图,彩色图会对 RGB 三个通道分别处理,可能导致颜色偏差);kernel:结构元素(决定腐蚀的 “工具大小”);iterations:腐蚀迭代次数(默认 1,次数越多,腐蚀越彻底,前景缩小越明显);anchor:结构元素的锚点(默认是中心,一般无需修改)。
实战代码
import cv2
import numpy as np# 1. 读取图像(以love.jpg为例,建议使用前景清晰的图像)
sun = cv2.imread('love.jpg')
if sun is None: # 避免图像路径错误导致程序崩溃print("图像读取失败,请检查文件路径是否正确!")
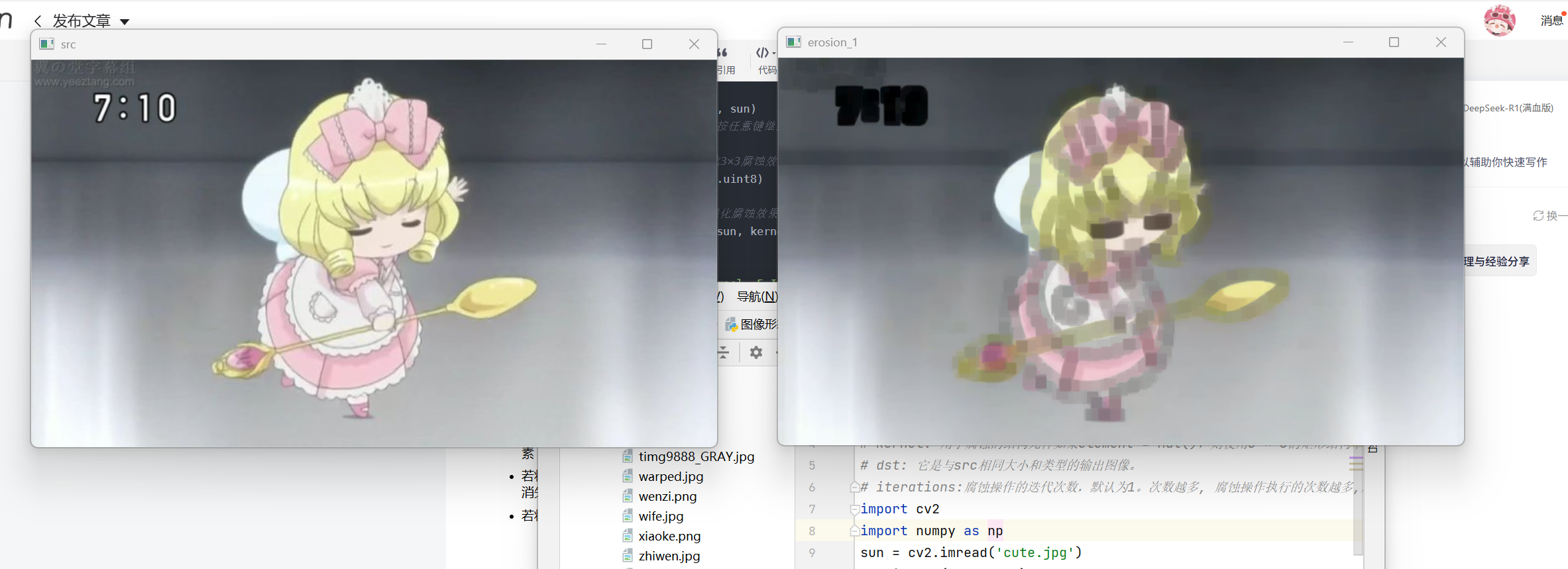
else:# 2. 显示原始图像cv2.imshow('Original Image', sun)cv2.waitKey(0) # 等待按键,按任意键继续(0表示无限等待)# 3. 定义结构元素(5×5矩形,比3×3腐蚀效果更显著)kernel = np.ones((5, 5), np.uint8)# 4. 执行腐蚀操作(迭代5次,强化腐蚀效果)erosion_result = cv2.erode(sun, kernel, iterations=5)# 5. 显示腐蚀结果cv2.imshow('Erosion (5x5 Kernel, 5 Iterations)', erosion_result)cv2.waitKey(0)# 6. 释放窗口资源(避免内存泄漏)cv2.destroyAllWindows()
效果分析
- 原始图像中的细线条(如文字边缘、图案纹理)会变细甚至断裂—— 因为边缘像素被结构元素 “啃食”;
- 若将
iterations从 1 改为 5,前景目标会持续缩小,小的细节(如爱心图案的尖角)可能完全消失; - 若将
kernel从 5×5 改为 3×3,腐蚀效果会减弱,前景缩小幅度更平缓。
2. 图像膨胀(Dilation):“扩大” 前景目标
原理
膨胀与腐蚀是 “相反操作”,核心逻辑是 **“结构元素滑动遍历图像,只要结构元素与前景区域有任意一点重叠,中心像素就保留为前景”**。可以理解为 “用结构元素‘扩张’前景的边缘,让前景区域逐渐扩大”。
作用
- 填补前景目标中的细小孔洞(孔洞边缘的前景被扩张后,会逐渐覆盖孔洞);
- 连接相邻的细小前景区域(原本断开的前景,扩张后会拼接在一起);
- 增强前景目标的轮廓(但会导致边缘模糊,因为扩张会 “拉宽” 边缘)。
OpenCV API 参数
cv2.dilate(src, kernel, dst=None, anchor=None, iterations=1, borderType=None, borderValue=None)
参数与cv2.erode()完全一致,核心差异是操作逻辑相反(一个收缩,一个扩张)。
实战代码
import cv2
import numpy as np# 1. 读取图像(以文字图像wenzi.png为例,文字易受膨胀影响)
wenzi = cv2.imread('wenzi.png')
if wenzi is None:print("图像读取失败,请检查文件路径!")
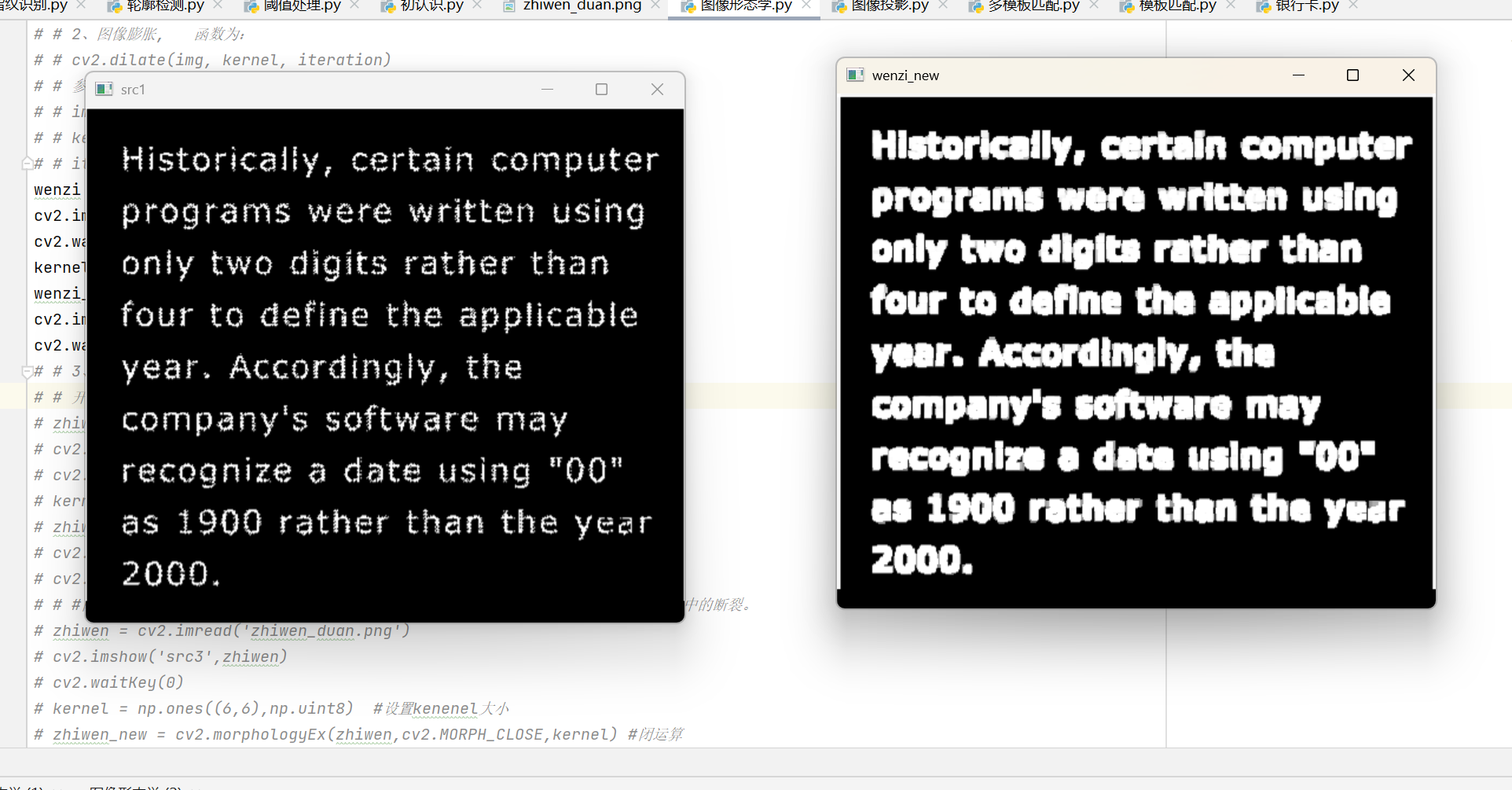
else:# 2. 显示原始图像cv2.imshow('Original Text Image', wenzi)cv2.waitKey(0)# 3. 定义结构元素(3×3矩形,适合精细膨胀)kernel = np.ones((3, 3), np.uint8)# 4. 执行膨胀操作(迭代2次,避免文字过度粘连)dilate_result = cv2.dilate(wenzi, kernel, iterations=2)# 5. 显示膨胀结果cv2.imshow('Dilation (3x3 Kernel, 2 Iterations)', dilate_result)cv2.waitKey(0)# 6. 释放窗口cv2.destroyAllWindows()
效果分析
- 文字图像经过膨胀后,文字会变粗—— 文字边缘的像素被结构元素 “扩张”;
- 若
iterations改为 10,文字会严重粘连,单个字符无法区分(如 “你好” 可能变成一个黑色块); - 若输入图像是二值图(黑底白字),膨胀后文字的 “锯齿边缘” 会更明显,因为扩张会放大边缘的不规则性。
3. 开运算(Opening):先腐蚀后膨胀,消除 “小亮点”
原理
开运算 = 腐蚀操作 + 膨胀操作(先对原始图像做腐蚀,再对腐蚀结果做膨胀)。
核心逻辑:先用腐蚀 “去掉” 小的前景噪声(小亮点),再用膨胀 “恢复” 前景目标的原始大小(因为腐蚀缩小的前景,膨胀可以补回来,但被腐蚀掉的噪声无法恢复)。
作用
- 平滑前景目标的轮廓(消除细小的突出物,如 “毛刺”);
- 断开前景目标间的细小连接(如两个相邻的圆形,中间有细线条连接,开运算会断开线条);
- 消除图像中的 “小亮点” 噪声(前景噪声),且不改变大前景目标的形状和大小。
OpenCV API 参数
OpenCV 提供统一的形态学运算函数cv2.morphologyEx(),通过op参数指定操作类型:
cv2.morphologyEx(src, op, kernel, dst=None, anchor=None, iterations=1, borderType=None, borderValue=None)
op=cv2.MORPH_OPEN:指定为开运算;- 其他参数与
cv2.erode()一致,iterations表示 “腐蚀 + 膨胀” 的总次数(默认 1,即 1 次腐蚀 + 1 次膨胀)。
实战代码
import cv2
import numpy as np# 1. 读取图像(以指纹图像zhiwen.png为例,指纹易有细小噪声)
zhiwen = cv2.imread('zhiwen.png')
if zhiwen is None:print("图像读取失败,请检查文件路径!")
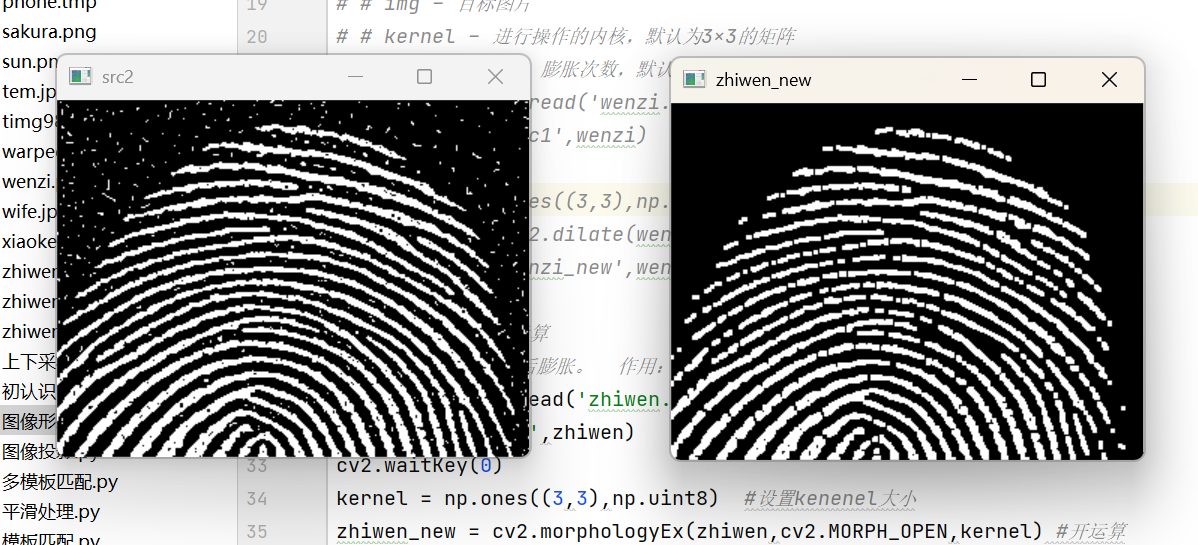
else:# 2. 显示原始图像(可见指纹上有细小亮点噪声)cv2.imshow('Original Fingerprint', zhiwen)cv2.waitKey(0)# 3. 定义结构元素(3×3矩形,适合精细去噪)kernel = np.ones((3, 3), np.uint8)# 4. 执行开运算(1次腐蚀+1次膨胀)opening_result = cv2.morphologyEx(zhiwen, cv2.MORPH_OPEN, kernel)# 5. 显示开运算结果cv2.imshow('Opening (3x3 Kernel)', opening_result)cv2.waitKey(0)# 6. 释放窗口cv2.destroyAllWindows()
效果分析
- 原始指纹图像中的 “小亮点” 噪声会完全消失—— 因为腐蚀先去掉了噪声,膨胀只恢复了指纹的主体纹理;
- 开运算后,指纹的整体形状和大小基本不变—— 膨胀补偿了腐蚀造成的前景缩小;
- 若结构元素改为 5×5,开运算会消除更大的亮点,但可能导致指纹的细纹理(如小分支)被误删。
4. 闭运算(Closing):先膨胀后腐蚀,填补 “小黑洞”
原理
闭运算 = 膨胀操作 + 腐蚀操作(先对原始图像做膨胀,再对膨胀结果做腐蚀)。
核心逻辑:先用膨胀 “填补” 前景中的小孔洞(小黑洞),再用腐蚀 “恢复” 前景目标的原始大小(膨胀扩大的前景,腐蚀可以缩回来,但被填补的孔洞无法恢复)。
作用
- 弥合前景目标中的细小孔洞(如圆形前景中的小黑点,闭运算会填补黑点);
- 连接前景目标间的细小间断(如指纹中的断裂线条,闭运算会连接线条);
- 消除图像中的 “小黑洞” 噪声(背景噪声),且不改变大前景目标的形状。
实战代码
import cv2
import numpy as np# 1. 读取图像(以有间断的指纹图像zhiwen_duan.png为例)
zhiwen = cv2.imread('zhiwen_duan.png')
if zhiwen is None:print("图像读取失败,请检查文件路径!")
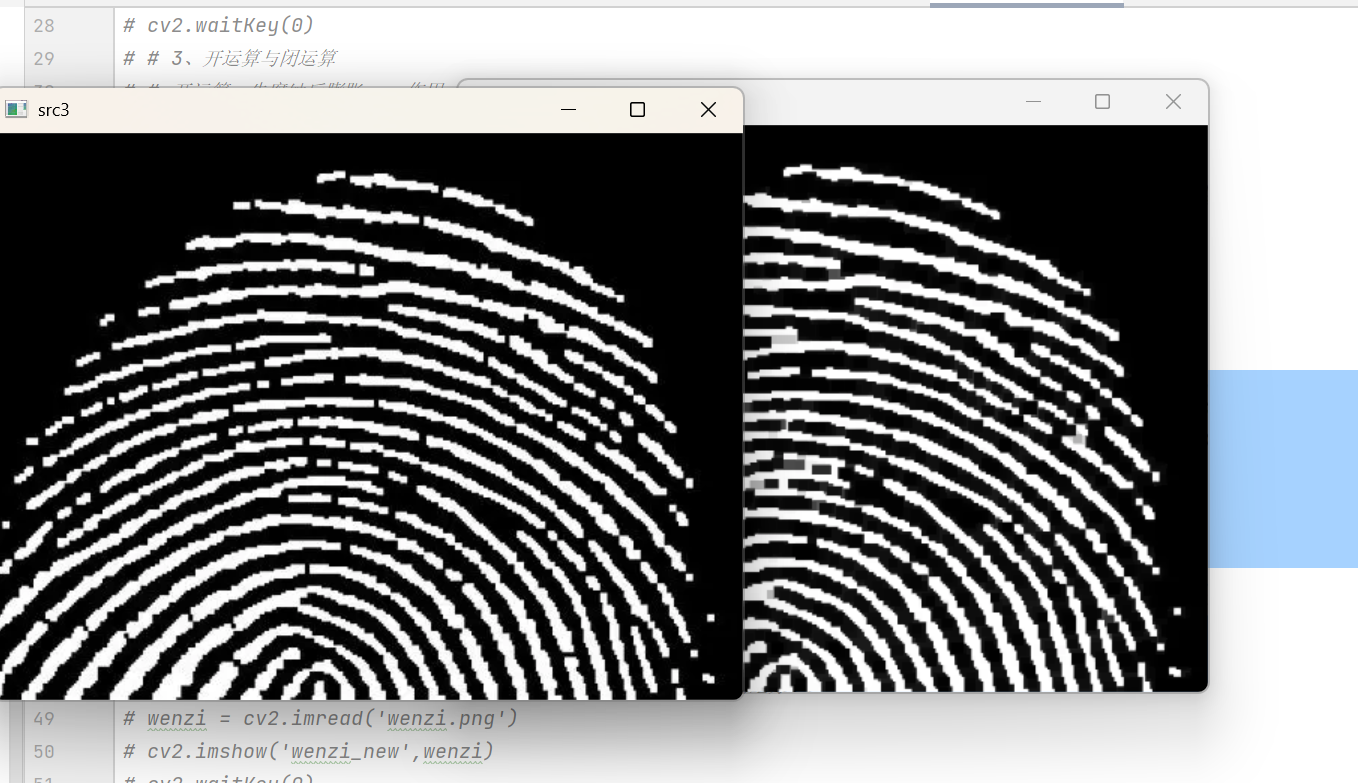
else:# 2. 显示原始图像(可见指纹有细小间断和孔洞)cv2.imshow('Original Broken Fingerprint', zhiwen)cv2.waitKey(0)# 3. 定义结构元素(6×6矩形,比3×3更适合填补较大孔洞)kernel = np.ones((6, 6), np.uint8)# 4. 执行闭运算(1次膨胀+1次腐蚀)closing_result = cv2.morphologyEx(zhiwen, cv2.MORPH_CLOSE, kernel)# 5. 显示闭运算结果cv2.imshow('Closing (6x6 Kernel)', closing_result)cv2.waitKey(0)# 6. 释放窗口cv2.destroyAllWindows()
效果分析
- 指纹中的细小间断和孔洞会被填补—— 膨胀先扩大前景,覆盖孔洞和间断,腐蚀再缩回到原始大小;
- 为什么用 6×6 的结构元素?因为结构元素越大,能填补的孔洞 / 连接的间断越宽,3×3 结构元素可能无法覆盖较大的孔洞;
- 若
iterations改为 2,闭运算会重复 2 次膨胀 + 2 次腐蚀,填补效果更强,但可能导致前景目标边缘过度平滑。
5. 梯度运算(Morphological Gradient):提取前景边缘
原理
梯度运算 = 膨胀结果 - 腐蚀结果。
核心逻辑:膨胀会扩大前景,腐蚀会缩小前景,两者的像素值差值,恰好对应前景目标的 “边缘区域”—— 因为边缘是 “膨胀新增的像素” 与 “腐蚀丢失的像素” 的交集,主体区域则会被抵消(膨胀和腐蚀的主体区域像素值相同,差值为 0)。
作用
- 突出显示图像中强度变化剧烈的区域(即边缘);
- 用于目标轮廓提取(如文字边缘、物体轮廓),是后续图像分割、特征识别的基础;
- 相比 Canny 边缘检测,梯度运算更简单,且能保留更完整的轮廓(但抗噪声能力较弱)。
实战代码
import cv2
import numpy as np# 1. 读取图像(以文字图像wenzi.png为例,文字边缘清晰)
wenzi = cv2.imread('wenzi.png')
if wenzi is None:print("图像读取失败,请检查文件路径!")
else:# 2. 显示原始图像cv2.imshow('Original Text Image', wenzi)cv2.waitKey(0)# 3. 定义结构元素(2×2矩形,边缘提取更精细)kernel = np.ones((2, 2), np.uint8)# 4. 分别执行膨胀和腐蚀(验证梯度的来源)dilate_wenzi = cv2.dilate(wenzi, kernel, iterations=1)erode_wenzi = cv2.erode(wenzi, kernel, iterations=1)cv2.imshow('Dilation Result', dilate_wenzi) # 文字扩大cv2.waitKey(0)cv2.imshow('Erosion Result', erode_wenzi) # 文字缩小cv2.waitKey(0)# 5. 执行梯度运算(直接用morphologyEx,无需手动计算差值)gradient_result = cv2.morphologyEx(wenzi, cv2.MORPH_GRADIENT, kernel)# 6. 显示梯度结果(文字边缘被突出,主体为黑色)cv2.imshow('Morphological Gradient (Edge)', gradient_result)cv2.waitKey(0)# 7. 释放窗口cv2.destroyAllWindows()
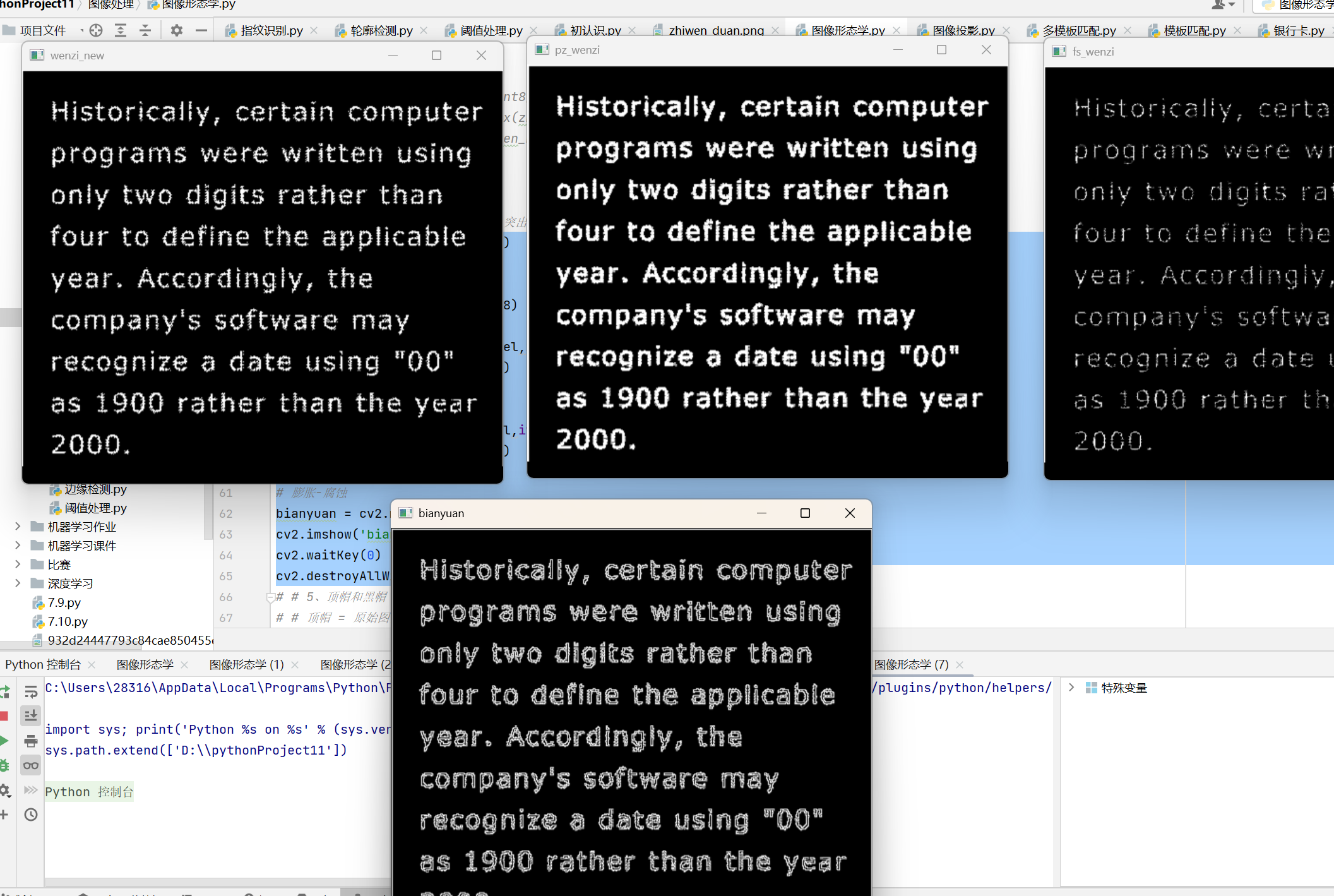
效果分析
- 梯度结果中,文字的主体部分消失(变为黑色),只保留了文字的边缘(变为白色)—— 因为主体区域的膨胀和腐蚀像素值相同,差值为 0;
- 结构元素越大,边缘越宽—— 因为膨胀和腐蚀的差异更大,边缘区域的像素更多;
- 若输入图像是彩色图,梯度结果会显示彩色边缘(因为 RGB 三个通道分别计算梯度后合并)。
6. 顶帽(Top Hat):提取 “比周围亮的小区域”
原理
顶帽 = 原始图像 - 开运算结果。
核心逻辑:开运算会消除 “小亮点”(前景噪声),并平滑前景轮廓。原始图像减去开运算结果后,剩下的部分就是 “被开运算去掉的内容”—— 即 “比周围背景亮的小区域”(如暗背景中的亮噪声、前景的细小突出物)。
作用
- 提取图像中的亮噪声(如黑底白字图像中的小白点、夜景中的灯光亮点);
- 增强暗背景下的亮细节(如医学图像中暗组织里的亮细胞);
- 校正光照不均匀的图像(若图像局部偏暗,顶帽可突出该区域的亮细节)。
实战代码
import cv2
import numpy as np# 1. 读取图像(以sun.png为例,假设图像有暗背景和亮噪声)
sun = cv2.imread('sun.png')
if sun is None:print("图像读取失败,请检查文件路径!")
else:# 2. 显示原始图像cv2.imshow('Original Image', sun)cv2.waitKey(0)# 3. 定义结构元素(2×2矩形,适合提取细小亮噪声)kernel = np.ones((2, 2), np.uint8)# 4. 先执行开运算(验证顶帽的来源)open_sun = cv2.morphologyEx(sun, cv2.MORPH_OPEN, kernel)cv2.imshow('Opening Result', open_sun) # 亮噪声已被消除cv2.waitKey(0)# 5. 执行顶帽运算tophat_result = cv2.morphologyEx(sun, cv2.MORPH_TOPHAT, kernel)# 6. 显示顶帽结果(亮噪声被突出,背景为黑色)cv2.imshow('Top Hat (Bright Noise)', tophat_result)cv2.waitKey(0)# 7. 释放窗口cv2.destroyAllWindows()
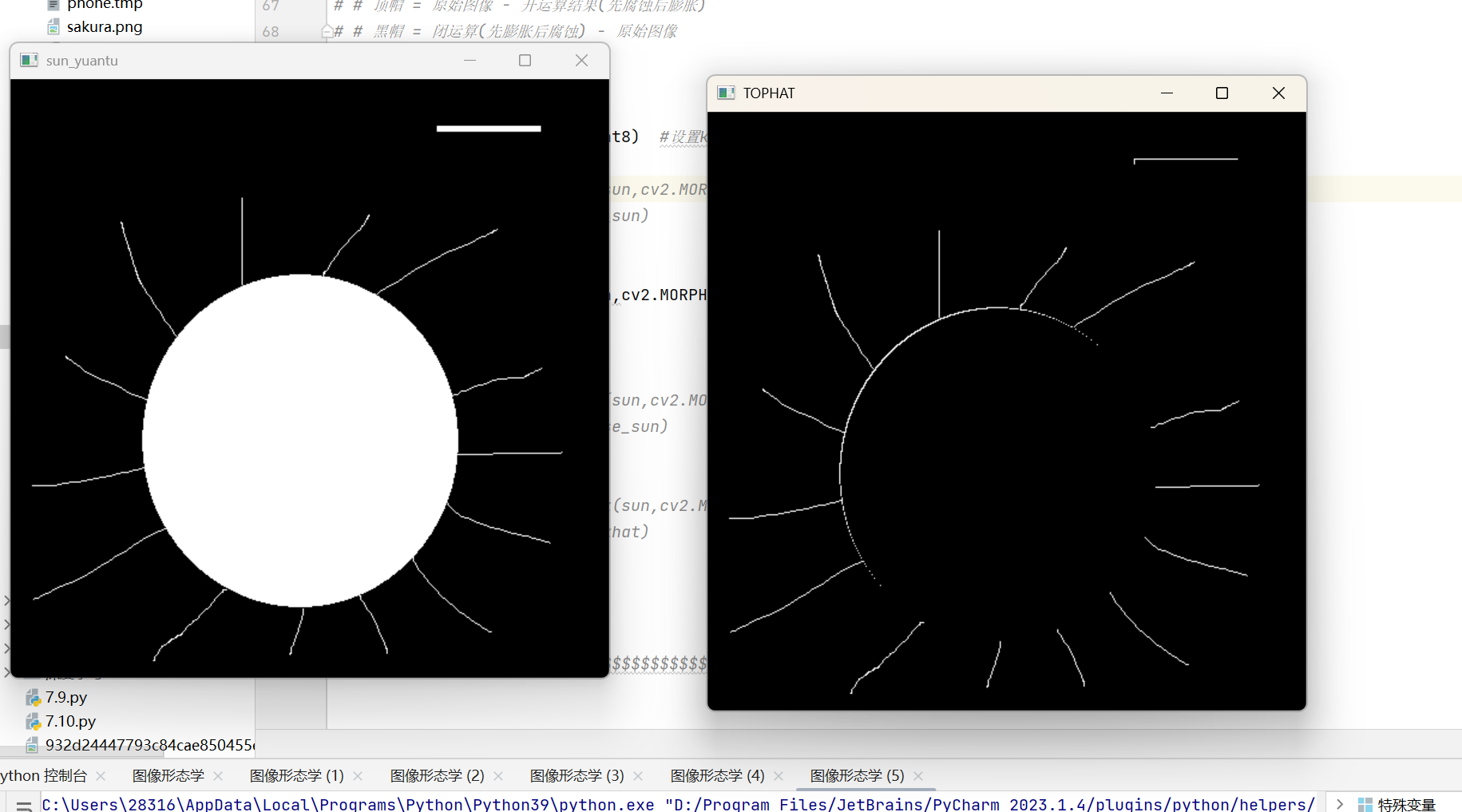
效果分析
- 顶帽结果中,主要显示的是原始图像中的亮噪声—— 因为开运算消除了这些噪声,原始图像与开运算结果的差值就是噪声;
- 若原始图像没有亮噪声,顶帽结果会接近全黑—— 原始图像与开运算结果几乎一致,差值很小;
- 若结构元素改为 5×5,顶帽会提取更大的亮区域(如小的亮前景目标),而非细小噪声。
7. 黑帽(Black Hat):提取 “比周围暗的小区域”
原理
黑帽 = 闭运算结果 - 原始图像。
核心逻辑:闭运算会填补 “小黑洞”(背景噪声),并平滑前景轮廓。闭运算结果减去原始图像后,剩下的部分就是 “被闭运算填补的内容”—— 即 “比周围背景暗的小区域”(如亮背景中的暗噪声、前景的细小孔洞)。
作用
- 提取图像中的暗噪声(如白底黑字图像中的小黑点、白纸中的墨点);
- 增强亮背景下的暗细节(如 X 光图像中亮骨骼里的暗裂纹);
- 突出前景目标中的孔洞(如零件图像中的小孔、织物图像中的纱线间隙)。
实战代码
import cv2
import numpy as np# 1. 读取图像(以sun.png为例,假设图像有亮背景和暗噪声)
sun = cv2.imread('sun.png')
if sun is None:print("图像读取失败,请检查文件路径!")
else:# 2. 显示原始图像cv2.imshow('Original Image', sun)cv2.waitKey(0)# 3. 定义结构元素(2×2矩形,适合提取细小暗噪声)kernel = np.ones((2, 2), np.uint8)# 4. 先执行闭运算(验证黑帽的来源)close_sun = cv2.morphologyEx(sun, cv2.MORPH_CLOSE, kernel)cv2.imshow('Closing Result', close_sun) # 暗噪声已被填补cv2.waitKey(0)# 5. 执行黑帽运算blackhat_result = cv2.morphologyEx(sun, cv2.MORPH_BLACKHAT, kernel)# 6. 显示黑帽结果(暗噪声被突出,背景为黑色)cv2.imshow('Black Hat (Dark Noise)', blackhat_result)cv2.waitKey(0)# 7. 释放窗口cv2.destroyAllWindows()
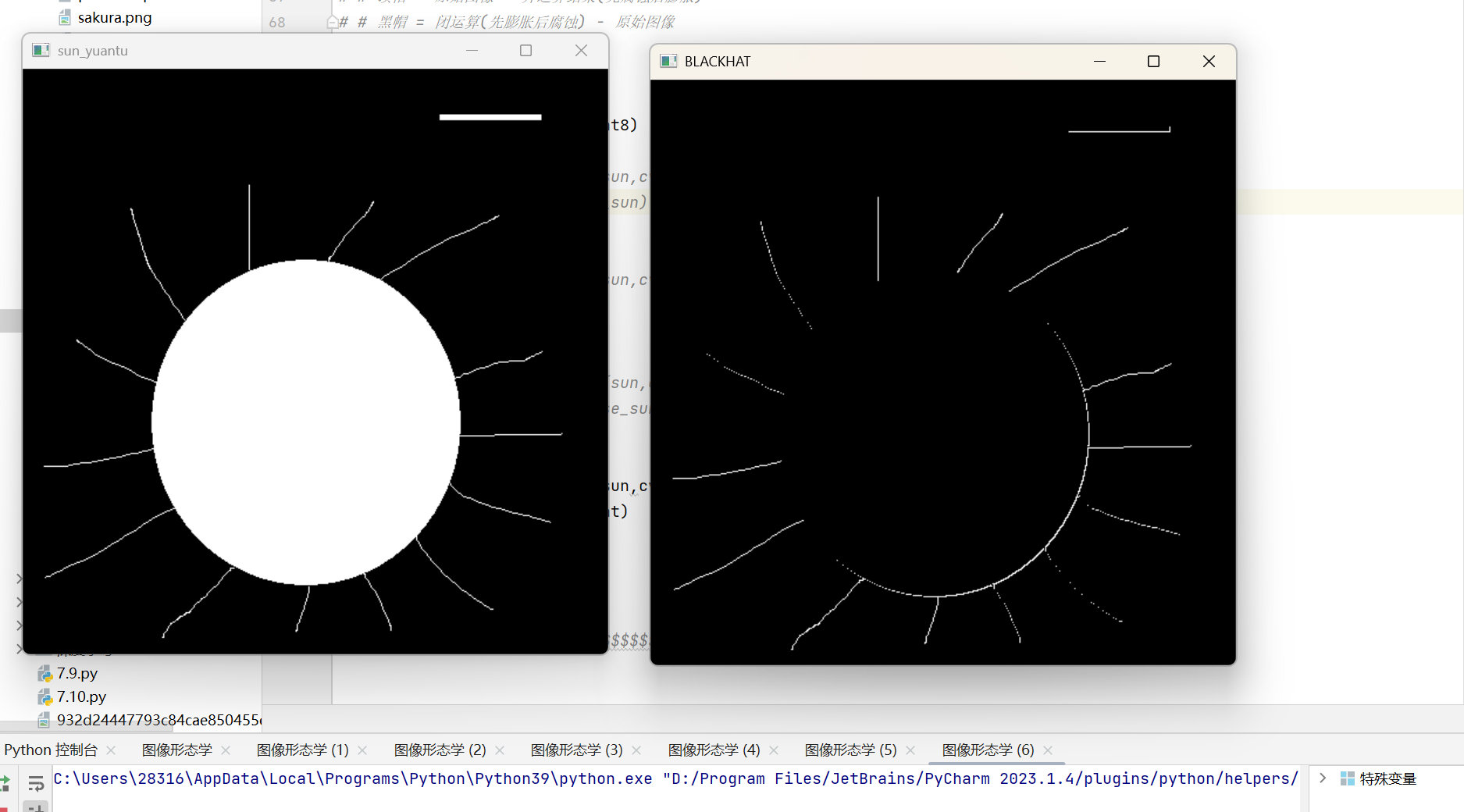
效果分析
- 黑帽结果中,主要显示的是原始图像中的暗噪声—— 因为闭运算填补了这些噪声,闭运算结果与原始图像的差值就是噪声;
- 若原始图像没有暗噪声,黑帽结果会接近全黑—— 闭运算结果与原始图像几乎一致,差值很小;
- 顶帽与黑帽的核心区别:顶帽提取 “亮小区域”,黑帽提取 “暗小区域”,两者互为补充,常用于图像噪声的全面检测。
三、总结:7 种形态学操作对比与应用场景
为了方便大家快速选型,下表整理了 7 种操作的核心逻辑、作用及典型应用场景:
| 操作名称 | 核心逻辑 | 核心作用 | 典型应用场景 |
|---|---|---|---|
| 腐蚀(Erosion) | 结构元素啃食前景边缘 | 缩小前景、去亮噪声、断连接 | 指纹去噪、文字细化 |
| 膨胀(Dilation) | 结构元素扩张前景边缘 | 扩大前景、补暗孔洞、连间断 | 文字加粗、孔洞填补 |
| 开运算(Opening) | 腐蚀 + 膨胀 | 去亮噪声、平滑轮廓、断连接 | 车牌去噪、遥感图像小亮点消除 |
| 闭运算(Closing) | 膨胀 + 腐蚀 | 补暗孔洞、平滑轮廓、连间断 | 零件图像孔洞填补、指纹断纹连接 |
| 梯度运算 | 膨胀结果 - 腐蚀结果 | 提取前景边缘、轮廓检测 | 物体轮廓提取、图像分割预处理 |
| 顶帽(Top Hat) | 原始图像 - 开运算结果 | 提取亮小区域、增强暗背景亮细节 | 夜景灯光检测、医学图像亮细胞提取 |
| 黑帽(Black Hat) | 闭运算结果 - 原始图像 | 提取暗小区域、增强亮背景暗细节 | 白纸墨点检测、X 光图像裂纹识别 |
四、常见问题与注意事项
图像读取失败怎么办?
检查文件路径是否正确(绝对路径如C:/images/love.jpg,相对路径需确保图像与代码在同一文件夹),同时检查图像格式是否支持(OpenCV 支持 JPG、PNG、BMP 等)。结构元素如何选择?
- 精细处理选 3×3/2×2,显著处理选 5×5 及以上;
- 处理圆形目标用圆形结构元素(
cv2.MORPH_ELLIPSE),处理线性目标用十字形结构元素(cv2.MORPH_CROSS)。
迭代次数越多越好吗?
不是。迭代次数过多会导致前景目标严重变形(如腐蚀过度导致前景消失,膨胀过度导致前景粘连),建议从 1 开始逐步调整,观察效果。彩色图与灰度图哪个更适合形态学操作?
优先用灰度图或二值图。彩色图会对每个通道分别处理,可能导致颜色失真,且运算速度更慢;若必须用彩色图,建议先转灰度图(cv2.cvtColor(src, cv2.COLOR_BGR2GRAY))。
通过本文的讲解,相信你已经掌握了 OpenCV 形态学操作的核心原理与实战技巧。建议结合实际图像(如自己拍摄的文字、指纹、零件图)反复测试,感受结构元素、迭代次数对结果的影响,逐步积累实战经验!



)



: invalid multibyte string 9)

 文件 IO 和标准 IO)

)


)




