摘要
近年来,随着人口老龄化问题的加重,常年卧床的老年人数增多,同时因为各种疾病的原因,患肢体功能障碍的人数也在增加。严重影响着患者的生活质量,同时给社会和家庭增加了很多麻烦。他们迫切希望尽快康复,回归健康的生活。
基于病人的需求,结合国内外的发展现状,本文提出了一种新型的床上肢体康复机器人结构,将康复运动和床结合在一起,让病患者只需要躺在床上就可以完成肢体的康复运动,尽快摆脱病魔。与此同时,床上肢体康复机器人不会疲劳,可以完整准确的完成一系列的康复运动,降低了人力资源的损耗,还可以改善患者的心肺功能,减少肌肉萎缩防止长期卧床带来的并发症,同时减少脑部患者的后遗症,帮助患者更好的生活。
论文采用模块化的设计思想,首先分析了人体的生理结构和运动特点,简化了人体四肢的自由度,规划机器人的康复训练空间,完成了上下肢的运动分析和康复模块的设计,上肢采用的是五杆机构,可以实现两个自由度的运动,帮助患者进行上肢康复。下肢使用的是曲柄滑块机构,一个自由度,实现患者的下肢锻炼。最后使用solidworks软件完成了床上肢体康复机器人的三维结构设计。使用ansys有限元分析软件完成强度分析和机器人的结构改进。使得所设计床上肢体康复机器人能更好的满足患者的需求。可以更好的帮助患者回归社会。
关键词:康复机器人;结构设计;运动分析;有限元分析;
目 录
摘要 I
Abstract II
1 绪论 1
1.1 选题背景及意义 1
1.2 国内外研究现状与发展趋势 2
1.2.1 国外研究现状 2
1.2.2 国内研究现状 4
1.3 研究内容 5
2 床上肢体康复机器人的总体方案设计 6
2.1 人体上肢运动特点分析 6
2.2 人体下肢运动特点分析 7
2.3 人体各关节间尺寸范围 8
2.4 床上肢体康复机器人的总体方案 9
2.5 本章小结 10
3 床上肢体康复机器人的主体结构设计 11
3.1 上肢运动分析 11
3.2 上肢康复模块的机构设计 11
3.2.1 上肢机构设计 11
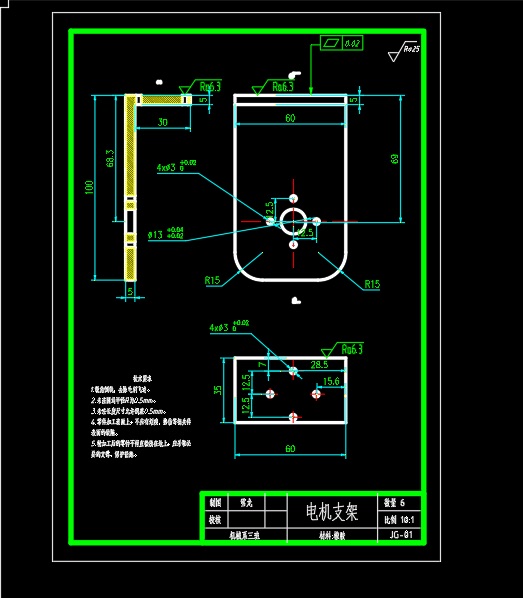
3.2.2 上肢机构电机的选型 12
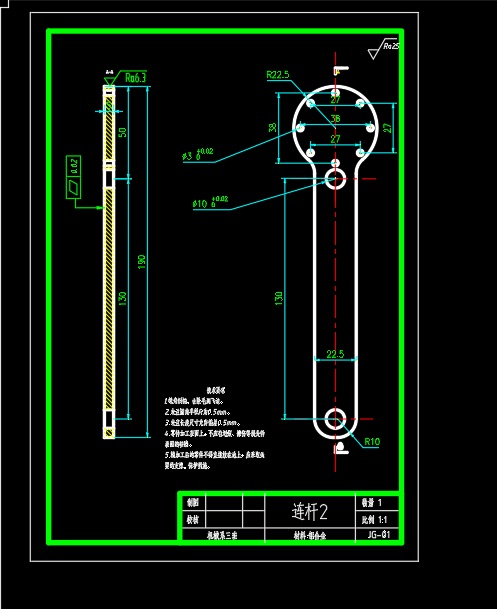
3.2.3 连杆的设计及校核 13
3.3 下肢运动分析 15
3.4 下肢康复模块的机构设计 16
3.4.1 下肢电机的选型计算 17
3.4.2 下肢中心转轴的设计及校核 18
3.4.3 下肢轴承的选型及校核 21
3.4.4 直线导轨的选型及校核 22
3.5 本章小结 23
4 床上肢体康复机器人多体位变化模块的结构设计 24
4.1 多体位变化模块的驱动方式设计 24
4.2 多体位变化模块的移动平台设计 25
4.3 多体位变化模块的姿态变化平台设计 27
4.4 本章小结 28
5 仿真验证与分析 29
5.1 Solidworks软件 29
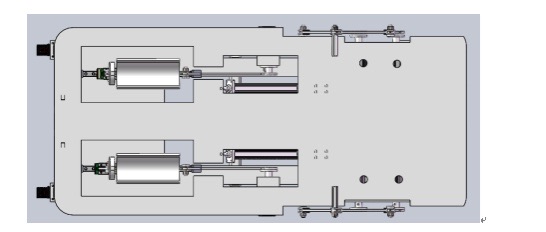
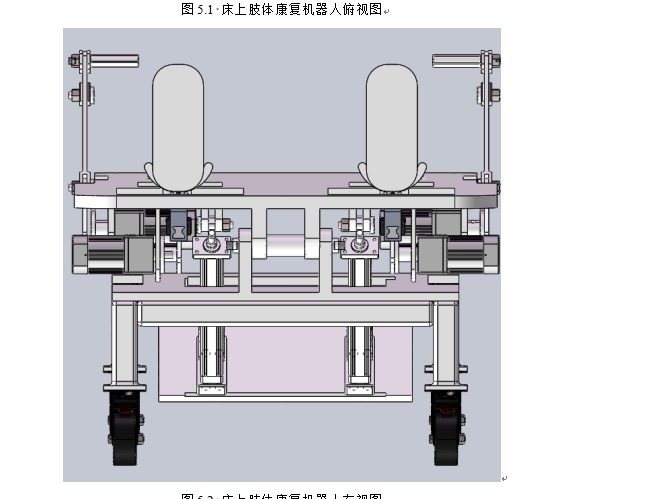
5.2 床上肢体康复机器人三维建模 30
5.3 关键零部件的有限元分析 31
5.3.1 Ansys workbench 31
5.3.2 材料的选择 33
5.3.3 床体的有限元分析 34
5.3.4 连杆的有限元分析 34
5.3.5 轴的有限元分析 36
6 总结与展望 37
6.1 总结 37
6.2 展望 37
参考文献 38
致 谢 40
附录A 41
附录B 45
1 绪论
1.1 选题背景及意义
随着我国经济的快速发展,人们的生活水平也得到了比较大的提升,人们的饮食结构和工作方式的变化,使得越来越多的人养成了不好的生活习惯。同时随着计算机技术的发展,大多数的工作都需要使用计算机来完成,越来越多的人开始习惯于久坐不动的工作,很少进行体育锻炼。与此同时,每年都有很多人因为疾病或者车祸造成的高位截瘫患者,需要长期卧床休养。随着年龄的增长,这些生活方式将增加患病的风险,例如高血压等脑血管疾病,这些疾病会给病人造成运动失调等后遗症,影响其生活的质量。医学研究表明,除了一些很有必要的医学手段进行治疗以为,正确的康复训练对患者的上肢和下肢的康复也有一定的好处[1]。
虽然肢体运动障碍患者需要接受必要的康复训练,但是我国目前在医疗康复训练方面的服务还不能满足患者的需求[2]。在发达国家每10万人口中就有5位康复医师,而在我国每10万人口中仅有0.4位康复医师。据统计,在我国各级医院中共需要大概100万的医疗康复类人才,是现有数量的10倍,同时随着我国人口老龄化的趋势加重,需要更多的医疗康复类人才。仅仅依靠现有的康复手段远远不能满足未来康复医疗行业的需求,因此,基于运动康复理论,通过分析人体的结构特点,利用人体的生理特点,设计一种可以用于患者在床上进行上肢和下肢康复动作的康复医疗床具有极其重要的意义[3]。设计的上下肢康复机构可以帮助患者进行康复锻炼。肢体康复机器人训练系统不仅可以为患者提供安全可靠的肢体康复训练,还可以改善患者的心肺功能,减少肌肉萎缩防止长期卧床带来的并发症,同时减少脑部患者的后遗症,帮助患者更好的生活[4]。
目前市面上比较常见的床上肢体 康复机器人存在的主要问题就是没有同时集成上肢和下肢的运动康复,只有实现上肢的康复锻炼仪器,或者单独锻炼下肢的康复锻炼仪器,没有同时在一张床上上肢和下肢同时锻炼的仪器[5]。因此在这样的背景下,本文设计了一种新型的床上肢体康复机器人[6]。
本文设计了一种可以帮助床上患者进行康复训练的床上肢体康复机器人,首先对人体的生理结构特点进行分析,简化人体自由度,规划机器人的康复训练空间,以保证患者在训练过程中的安全性。在满足人类生理结构的基础上,提出了床上肢体康复机器人的整体结构设计,其次根据人体的结构和自由度分配要求完成主要零部件的结构仿真分析,完成三维模型的结构设计,使用有限元分析软件完成强度分析和机器人的结构改进。使得所设计床上肢体康复机器人能更好的满足患者的需求。床上肢体康复机器人可以更好的帮助患者回归社会,因此床上肢体康复机器人的设计具有很大的市场前景和研究意义。
1.2 国内外研究现状与发展趋势
从上世纪60年代开始,就存在让康复机器人为医疗患者服务的先例,随着科技的发展,医疗康复机器人逐步进入人们的视野。在肢体康复机器人研究领域,全球的大部分研究中心都位于美国、加拿大等众多发达国家内,直到上世纪90年代,国内一些机构才开始致力于康复机器人的设计研发领域[7]。到目前为止,医疗康复机器人行业进入全面发展的时期。随着技术的发展,康复机器人将创造更好的医疗效果和商业利益[8]。
1.2.1 国外研究现状
二十世纪初,国外的一家从事医疗器械设计生产的Hocoma公司,设计研发了一款专用于下肢康复机器人,如图1.1所示。该款康复机器人最大的特点是可以让患者在进行康复训练的时候,可以躺在床上进行训练,这样避免在进行康复训练的时候肢体患者出现二次伤害,设计的床上下肢康复机器人的床身可以任意的进行调节,同时在锻炼的患者胸部安装有一个安全装置,主要是实现对患者的保护作用。床身的下方位置安装有脚踏板,脚踏板上安装有弹簧,当患者的脚踩在弹簧上时,脚踏板可以根据患者的踩踏角度实现脚部踝关节的调节和训练,从而完成下肢的康复治疗[10]。
CA1区域(dCA1)的时间细胞对NLP中的深层语义分析的积极影响和启示)
全定制设计进阶)

)









 降低版本,涉及兼容性问题)




生成!)
