参考:
https://www.bilibili.com/video/BV1MF4m1V7e3/
https://blog.csdn.net/2401_86810419/article/details/148811121
https://www.bilibili.com/video/BV1cz421872F?t=233.9
https://wuli.wiki/online/SphHar.html
https://zhuanlan.zhihu.com/p/467466131
特别指出的是SY__007的3DGS较真系列,对本文有极大的启发和参考价值,下文有很多截图也直接来自视频,强烈推荐大家移步小破站,去观看视频。
做雪球?
What is splatting?

关于Splat,在英语中作抛雪球打击到墙面的拟声词。
Splatting是一种体渲染的方法:将3D物体渲染到2D平面
与NeRF中的渲染方法的差异:
NeRF中使用Ray-casting(类似射线求积分):是计算像素点收到发光粒子的影响来生成图像。
3DGS中使用Splatting这种主动的方法,计算发光粒子如何影响像素点
Splatting算法的核心:
1.选择雪球
2.抛掷雪球:从3D投影到2D,得到足迹(footprint)
3.加以合成,得到最终的图像
一:为什么使用核(雪球,Gaussian):
基于Gaussian的数学性质:
1.Gaussian本身是闭合的椭球,经过仿射变换后依旧是封闭的
2.高维Gaussian降维(沿某个轴进行积分)之后依旧是Gaussian
对于椭球Gaussian:
![]()
其中x是三维空间中的点,
μ是高斯分布的均值向量,表示Gaussian的中心点位置
Σ是协方差矩阵,描述Gaussian在3D空间中的形状和方向,它是半正定的
为什么这是一个椭球?
首先去了解 协方差矩阵。
对于Gauss分布:
一维:形状由 均值&方差 决定
高维:形状由 均值&协方差矩阵 决定
对于协方差矩阵:
-
是一个对称矩阵,决定高斯分布形状
-
对角线上元素为x轴/y轴/z轴的方差
-
反斜对角线上的值为协方差,表示x和y,x和z........的线性相关程度
这里直接用SY__007写的: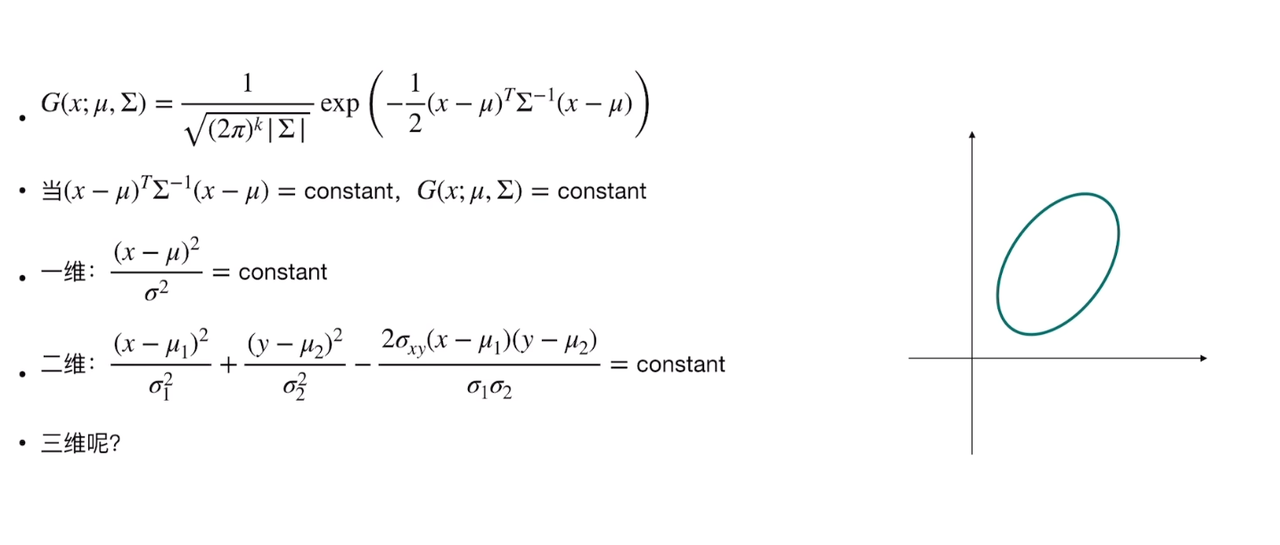
 抛雪球
抛雪球
如何进行参数变换?
从3D->像素的过程:
观测变换
观测变换:从世界坐标系-->相机坐标系
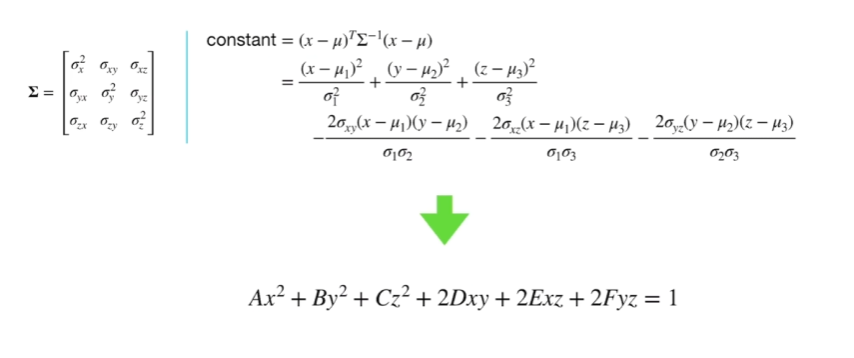
投影变换
投影变换:正交投影 、透视投影
正交投影:
对于立方体[l,r]*[b,t]*[f,n]
1.平移到原点
2.立方体缩放至[-1,1]^3的正方体空间内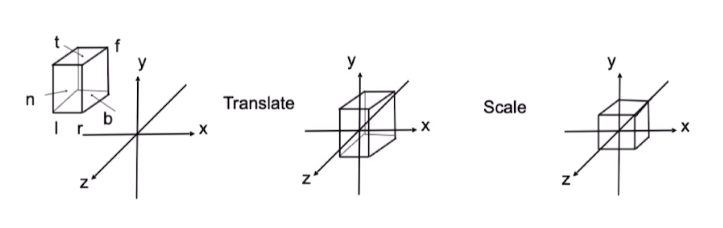
总的来说就是进行了仿射变换,
如题所给的例子的仿射变换即是: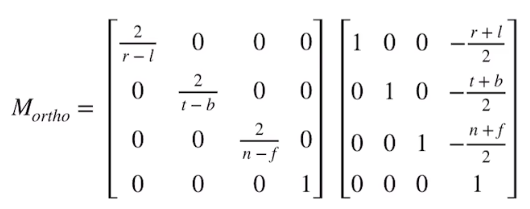
A这里是缩放矩阵
B为平移矩阵
在正交投影中,我们没有考虑对于原本的长方体的长和宽的比例不同,导致的缩放比例不同,其实产生了畸变,这个问题会在之后的视口变换解决
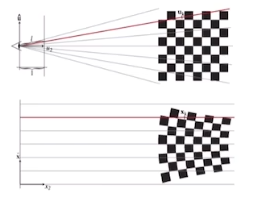
透视投影:
透视投影需要满足近大远小的条件
对于视锥,我们先把他变换为‘立方体’,再进行正交投影
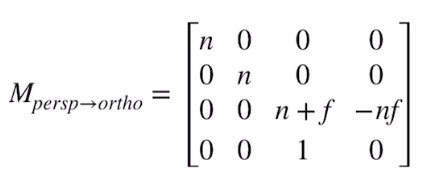
数学过程实在懒得写了,这里直接放上作者手稿一张
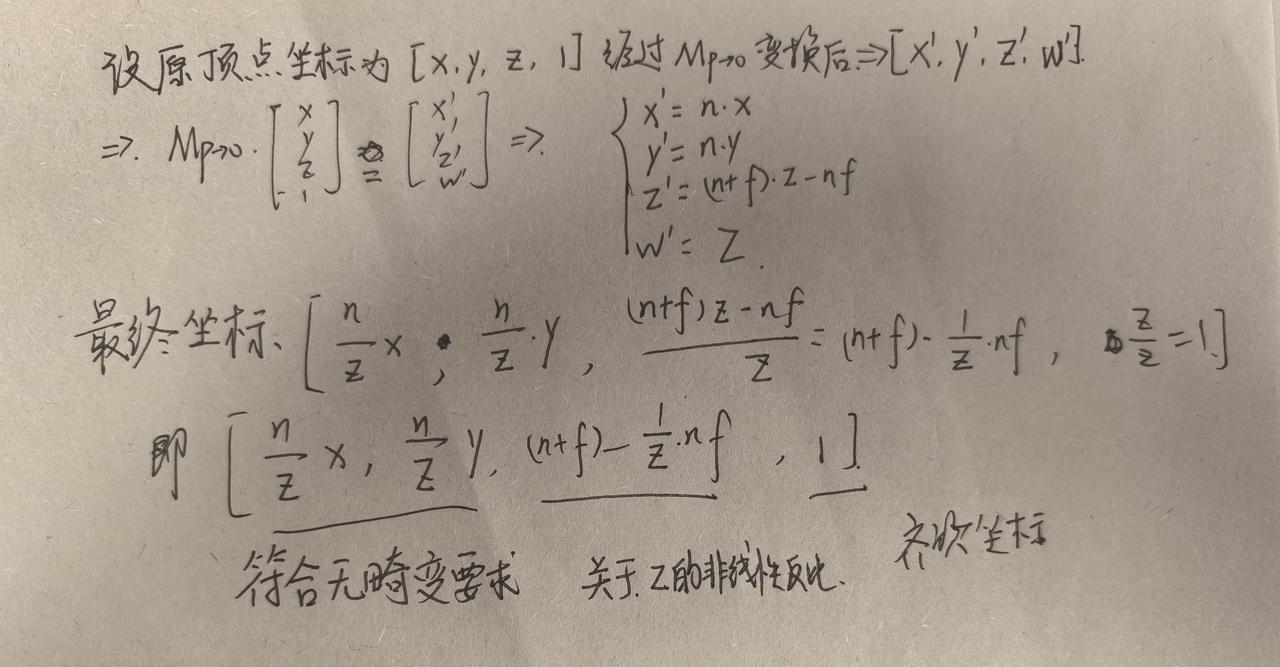
问题?:
透视投影是非线性的,也就是非放射变换,但是高斯椭球经过仿射变换后是高斯,但非仿射变换就不一定。
视口变换:
我们从简化的图形渲染管线开始:
3D 顶点 → 模型变换 → 视图变换 → 投影变换 → 裁剪 → 标准化设备坐标 → 视口变换 → 屏幕像素
之前的变换已经将顶点从”模型局部坐标“转换成NDC空间坐标,以OpenGL为例,正交投影下为[-1,1]×[-1,1]×[-1,1]
视口变换的目的就是把可见区域的标准化坐标,映射到显示器的实际像素区域,让图形真正显示在屏幕上。
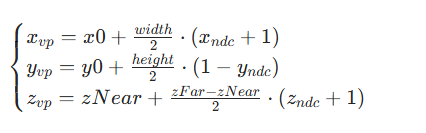
视口变换的数学实现
核心是缩放+平移的组合,把NDC范围映射到屏幕视口的像素范围:
(1)以OpenGL经典的[-1.1]立方体为例(xy对应屏幕二维,z用于深度缓冲):
-
NDC的x范围:
-
NDC的y范围:
-
NDC的z范围:
(或者[0,1],这取决于深度缓冲装置)
(2)目标视口的像素范围
假设屏幕视口的:
-
左下角像素坐标:(x0,y0)(比如窗口内视口偏移,或全屏时 (0,0))
-
宽度:width(像素数,如 800 )、高度:height(像素数,如 600 )
-
深度范围(可选,用于深度缓冲):[zNear,zFar](比如 [0,255] 或浮点深度 )
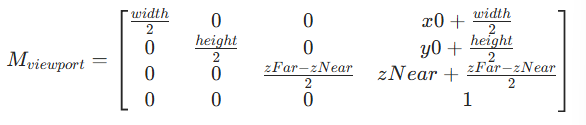
(3)视口变换矩阵与公式
视口变换通过缩放矩阵+平移矩阵,实现对标准化坐标,变换后得到屏幕像素坐标
用矩阵形式(齐次坐标下)可以表示为:
对于进行拆解
1.缩放部分:
-
x方向:
把[-1,1]缩放为[0,width]范围;
-
y方向:
把[-1,1]缩放为[0,height]范围,但考虑到屏幕坐标系一般y轴"向下为上”(与NDC相反),所以使用
反转;
-
z方向:
把[-1,1]缩放为[zNear,zFar](深度缓冲的实际范围)
2.平移部分
-
x 平移
,让缩放后的 [0,width] 起点对齐视口左下角 x0;
-
y 平移
,同理对齐视口左下角 y0;
-
z 平移
,让缩放后的深度对齐 zNear 起点。
视口变换的实际作用:
-
从虚拟坐标到物理屏幕
-
支持多视角渲染
-
深度缓冲的落地
光栅化:
1.光栅化的位置:渲染管线‘矢量-->像素’转换
简单渲染管线流程为:
3D 顶点 → 变换(模型/视图/投影)→ 裁剪 → 标准化设备坐标(NDC)→ 光栅化 → 像素着色 → 帧缓冲 → 屏幕
-
前面的变换,把顶点转成抽象的数学坐标(如NDC空间下的[-1,1]立方体)
-
光栅化要解决:如何把这些矢量图元拆解成屏幕上的离散像素,让每个像素知道“属于哪个图元,该染什么颜色”
2.光栅化的核心任务:图元的“离散化”
(1)输入:图元的“数学描述”
以三角形为例(图形学的最基础图元,复杂模型由三角形拼接),输入是三个顶点的坐标(NDC或视口变换后的屏幕坐标),以及顶点附带的属性(颜色、法向量、纹理坐标等)。
(2)输出:像素的“归属与属性”
输出是覆盖这些三角形的所有像素,并为每个像素插值计算属性(比如/顶点颜色查指出像素颜色,纹理坐标插值出采样位置),供后续像素着色器处理。
3.光栅化的关键步骤
(1)三角形 setup(配置)
计算三角形的边方程和包围盒
-
先找出三角形在屏幕上的最小包围矩形(AABB),只遍历这个范围内的像素,减少计算量;
-
推导三角形三条边的数学方程(如ax+by+c=0),用于判断i像素是否在三角形内
(2)三角形traversal(遍历)
-
对包围盒捏的每个像素(或'采样点'),用便方程判断是否在三角形内(比如OpenGL的“winding order”规则,或计算重心坐标)。
-
若像素在三角形内,就标记为属于该三角形,并进入属性插值阶段
(3)属性插值
三角形三个顶点有属性(如颜色、纹理坐标


)


—— 中间件安全WPS分析WeblogicJenkinsJettyCVE)

:fixture从入门到精通)




)





)
:Service)