触觉感知对于实现人类水平的机器人操作能力至关重要。而视觉触觉传感器(VBTS)作为一种有前景的解决方案,通过相机捕捉弹性凝胶垫的形变模式来感知接触的方式,为视触觉机器人提供了高空间分辨率和成本效益。然而,这些传感器复杂的物理特性和视觉信号处理需求为机器人应用带来了独特的挑战。缺乏高效且准确的VBTS模拟工具,极大地限制了触觉机器人的研究。本文提出了Taccel,一个高性能的模拟平台,集成了增量势能接触(IPC)和自适应动力学(ABD)方法,以高精度和前所未有的速度模拟机器人、触觉传感器和物体,在数千个并行环境中实现了超过实时18倍的加速。与以往在亚实时速度下运行且并行化有限的模拟器不同,Taccel提供了精确的物理模拟和逼真的触觉信号,并且还通过用户友好的API支持灵活的机器人-传感器配置。论文地址:https://arxiv.org/abs/2504.12908Taccel的核心技术与方法
Taccel的核心技术包括增量势能接触(IPC)和自适应动力学(ABD)。IPC是一种先进的接触处理方法,能够确保无穿透和无反转的物理模拟,特别适用于复杂接触场景,如凝胶垫与物体的交互。IPC通过引入屏障能量和摩擦势能,能够精确模拟接触力和摩擦力,从而生成逼真的触觉信号。ABD则是一种高效的刚体和软体动力学模拟方法,通过减少自由度(DoF)和优化计算流程,显著提升了模拟效率。ABD特别适用于机器人连杆和刚性物体的模拟,能够与IPC无缝结合,实现高精度的物理模拟。此外,Taccel通过深度神经网络(DNN)生成高分辨率的RGB触觉信号,模拟凝胶垫的形变和接触模式。DNN通过训练真实触觉数据,能够生成逼真的RGB图像和深度图,为触觉感知任务提供高质量的数据支持。Taccel还支持低分辨率的标记点跟踪,能生成局部形变模式,并将深度图和标记点转换为3D点云,提供空间信息。这些技术的结合使得Taccel能够在保证物理精度的同时,实现超过实时18倍的模拟速度,支持数千个并行环境。Taccel的应用与性能评估
Taccel在多种触觉机器人任务中展示了其有效性。在物体识别任务中,使用合成触觉数据训练的模型在真实数据上表现出色,无需领域适应。例如,在一个包含10种机械零件的分类任务中,模型在合成数据上的准确率达到86.50%,在真实数据上的准确率达到70.94%。这一结果表明,Taccel生成的触觉信号具有高度的真实性和可迁移性。在机器人抓取任务中,Taccel支持多种机器人手配置,生成大规模抓取数据集,为算法开发提供了丰富的数据支持。通过扩展DFC算法,Taccel能够生成优化的抓取姿态,确保凝胶垫与物体表面的垂直接触,从而提升触觉感知的效果。在关节物体操作任务中,Taccel能够精确模拟复杂的操作场景,如抽屉、柜门和螺栓螺母的装配。例如,在Tac-Man框架中,Taccel通过模拟凝胶垫的形变和接触力,实现了微波炉门和抽屉的精确操作,模拟结果与真实实验高度一致。性能评估表明,Taccel在复杂接触场景中表现出色,生成的触觉信号与真实数据高度一致,平均SSIM达到0.93。此外,Taccel在单个NVIDIA H100 GPU上支持超过4096个并行环境,模拟速度超过实时18倍,显著提升了数据生成和算法开发效率。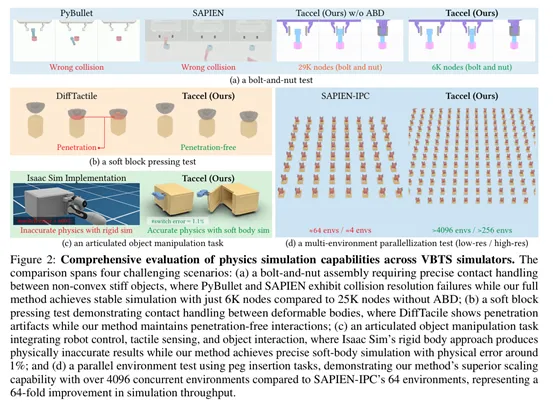
Taccel的优势与未来工作
Taccel通过其高性能、灵活性和精确性,为触觉机器人研究提供了一个强大的工具。其用户友好的API支持灵活的机器人-传感器配置,用户可以通过简单的Python脚本加载机器人、传感器和物体,并设置模拟参数。Taccel的高效并行化能力使其能够同时模拟数千个环境,为大规模数据生成和算法开发提供了可能。例如,在一个低分辨率的插销插入任务中,Taccel在4096个并行环境下的模拟速度达到915 FPS,超过实时18倍。在高分辨率的灵巧手操作任务中,Taccel在256个并行环境下的模拟速度达到12.67 FPS,仍然保持较高的效率。未来,Taccel的优化方向包括进一步优化计算效率、开发实时渲染功能以及扩展更多机器人应用场景。例如,通过优化线性系统求解器和简化模拟协议,Taccel可以进一步提升模拟速度;通过开发图形用户界面,Taccel可以降低使用门槛,吸引更多研究人员参与触觉机器人研究。这些改进将使Taccel成为触觉机器人研究不可或缺的平台,加速机器人系统的开发和应用。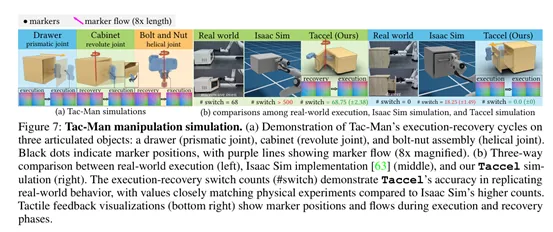
总结
Taccel是一个基于高性能GPU模拟的视觉触觉机器人平台,通过集成IPC和ABD技术,实现了高精度、高效率的物理模拟和触觉信号生成。其在物体识别、机器人抓取和关节物体操作中的广泛应用展示了其强大的能力。Taccel的推出为触觉机器人研究提供了新的工具,有望推动机器人与物理环境的交互和理解方式的变革。通过支持大规模模拟和高质量数据生成,Taccel将加速触觉机器人算法的开发,为未来智能机器人系统的实现奠定基础。参考文献:Y. Li et al., "Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU Simulation,"arXiv preprint arXiv:2504.12908, Apr. 2025.
Taccel:一个高性能的GPU加速视触觉机器人模拟平台
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若转载,请注明出处:http://www.pswp.cn/pingmian/80363.shtml 繁体地址,请注明出处:http://hk.pswp.cn/pingmian/80363.shtml
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

oracle 会话管理
会话管理 1:查看当前所有用户的会话(SESSION): SELECT * FROM V S E S S I O N W H E R E U S E R N A M E I S N O T N U L L O R D E R B Y L O G O N T I M E , S I D ; 其中 O r a c l e 内部进程的 U S E R N A M E 为空 2 :查看当前…

Python开发后端InfluxDB数据库测试接口
1、使用PyCharm创建一个Python项目wzClear 2、新建package包wzInfluxdb和wzConfig包,如上图所示,新建一个DB.json配置文件并添加influxdb配置信息,DB.json为统一配置文件 {"influxdbV1": {"url": "http://192.168.0…
)
采用LLaMa-Factory对QWen大模型实现微调(效果很好)
前言 LLaMA-factory是一个非常有用的开源框架。关于利用llama-factory实现大模型的微调,研究了有一个多月了,终于相对成功的微调了一个QWen的大模型。其中的曲折愿和大家分享! 一、源码的下载
在github上的网址:
GitHub - hiyou…

深入理解深度Q网络DQN:基于python从零实现
DQN是什么玩意儿?
深度Q网络(DQN)是深度强化学习领域里一个超厉害的算法。它把Q学习和深度神经网络巧妙地结合在了一起,专门用来搞定那些状态空间维度特别高、特别复杂的难题。它展示了用函数近似来学习价值函数的超能力…

机械物理:水力发电站工作原理是什么?
水利发电站的工作原理是将水的势能转化为电能,主要依赖水体的重力作用与能量转换设备。以下是其核心步骤和组成部分的详细解释: 1. 蓄水与势能积累
水坝与水库:通过建造水坝拦截河流,形成水库蓄水。水位升高后,水体的…
![[面试]SoC验证工程师面试常见问题(五)TLM通信篇](http://pic.xiahunao.cn/[面试]SoC验证工程师面试常见问题(五)TLM通信篇)
[面试]SoC验证工程师面试常见问题(五)TLM通信篇
SoC验证工程师面试常见问题(五) 摘要:UVM (Universal Verification Methodology) 中的 TLM (Transaction Level Modeling) 通信是一种用于在验证组件之间传递事务(Transaction)的高层次抽象机制。它通过端口(Port)和导出(Export)实现组件间的解耦通信,避免了信…
——CAD c#二次开发)
CAD属性图框值与Excel联动(CAD块属性导出Excel、excel更新CAD块属性)——CAD c#二次开发
CAD插件实现块属性值与excel的互动,效果如下: 加载dll插件(CAD 命令行输入netload ,运行xx即可导出Excel,运行xx1即可根据excel更新dwg块属性值。) 部分代码如下 // 4. 开启事务更新CAD数据using (Transact…

【数据挖掘】Apriori算法
Apriori算法是经典的关联规则挖掘算法,用于从事务型数据库中发现频繁项集和强关联规则,特别常用于购物篮分析等场景。 🧠 核心思想(Apriori原则) 一个项集是频繁的,前提是它的所有子集也必须是频繁的。 即&…


【论文阅读】——Articulate AnyMesh: Open-Vocabulary 3D Articulated Objects Modeling
文章目录 摘要一、介绍二、相关工作2.1. 铰接对象建模2.2. 部件感知3D生成 三、方法3.1. 概述3.2. 通过VLM助手进行可移动部件分割3.3. 通过几何感知视觉提示的发音估计3.4. 通过随机关节状态进行细化 四、实验4.1. 定量实验发音估计设置: 4.2. 应用程序 五、结论六、思考 摘要…

Zookeeper单机版安装部署
目录 1.1、概述1.2、系统环境1.3、部署流程1.3.1、下载安装包1.3.2、解压文件1.3.3、创建数据目录和日志目录1.3.4、配置ZooKeeper1.3.5、启动ZooKeeper服务1.3.6、连接和验证 1.4、Zookeeper服务管理命令1.4.1、启动Zookeeper服务1.4.2、停止Zookeeper服务1.4.3、查看Zookeepe…

在 Elasticsearch 中删除文档中的某个字段
作者:来自 Elastic Kofi Bartlett 探索在 Elasticsearch 中删除文档字段的方法。
更多有关 Elasticsearch 文档的操作,请详细阅读文章 “开始使用 Elasticsearch (1)”。 想获得 Elastic 认证?查看下一期 Elasticsear…


java的Stream流处理
Java Stream 流处理详解
Stream 是 Java 8 引入的一个强大的数据处理抽象,它允许你以声明式方式处理数据集合(类似于 SQL 语句),支持并行操作,提高了代码的可读性和处理效率。
一、Stream 的核心概念
1. 什么是 Str…

llama-Factory不宜直接挂接Ollama的大模型
前言
llama-Factory尝试使用Ollama本地安装的大模型。 一、在Ollama中安装QWen
安装qwen:0.5b 安装完成了: 同理安装qwen2.5:0.5b 安装完毕后,再用ollama list进行查看: 我们在chatbox中进行查看: 说明这两个大模型,…

基于WSL用MSVC编译ffmpeg7.1
在windows平台编译FFmpeg,网上的大部分资料都是推荐用msys2mingw进行编译。在win10平台,我们可以采用另一种方式,即wslmsvc 实现window平台的ffmpeg编译。 下面将以vs2022ubuntu22.04 为例,介绍此方法
0、前期准备
安装vs2022 &…

vue3+vite项目引入tailwindcss
从2025年1月tailwindcss4.0发布开始使用tailwindcss比之前简化很多
1,安装
yarn add tailwindcss tailwindcss/vite2,配置vite.config.js
import tailwindcss from tailwindcss/vite;...plugins: [tailwindcss(),...]
...3,在主css文件顶部添加
注意一定是css文件,不能是sc…

蓝牙RFCOMM协议概述
RFCOMM概述
概念
RFCOMM 协议提供了对 L2CAP 协议上的串行端口的模拟。该协议基于 ETSI 标准 GSM 07.10。
RFCOMM 采用与 TS07.10 相同的字节序列方式。所有二进制数字都按照从低位到高位的顺序,从左至右读。 两个使用RFCOMM通信的蓝牙设备可以打开多个仿真串行端…
![[工具]B站缓存工具箱 (By 郭逍遥)](http://pic.xiahunao.cn/[工具]B站缓存工具箱 (By 郭逍遥))
[工具]B站缓存工具箱 (By 郭逍遥)
📌 项目简介
B站缓存工具箱是一个多功能的B站缓存工具,包含视频下载、缓存重载、文件合并及系统设置四大核心功能。基于yutto开发,采用图形化界面操作,极大简化B站资源获取与管理流程。
工具可以直接将原本缓存的视频读取&#…

算法训练营第十三天|226.翻转二叉树、101. 对称二叉树、 104.二叉树的最大深度、111.二叉树的最小深度
递归
递归三部曲:
1.确定参数和返回值2.确定终止条件3.确定单层逻辑
226.翻转二叉树
题目 思路与解法
第一想法: 递归,对每个结点进行反转
# Definition for a binary tree node.
# class TreeNode:
# def __init__(self, val0, le…