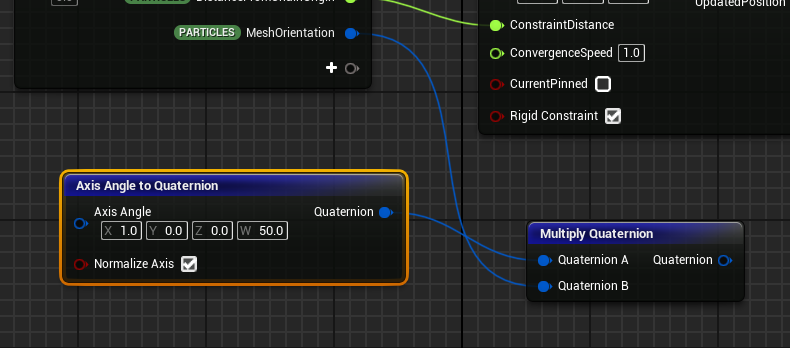
Axis Angle中,X,Y,Z分别为旋转的轴向,W为旋转的角度,在这里旋转角度不需要除以2,因为里面已经除了,再将计算好的四元数与要进行旋转的四元数进行相乘,结果就是按照原来的角度绕着某一轴向旋转了某一角度
Axis Angle中,X,Y,Z分别为旋转的轴向,W为旋转的角度,在这里旋转角度不需要除以2,因为里面已经除了,再将计算好的四元数与要进行旋转的四元数进行相乘,结果就是按照原来的角度绕着某一轴向旋转了某一角度
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若转载,请注明出处:http://www.pswp.cn/pingmian/82668.shtml 繁体地址,请注明出处:http://hk.pswp.cn/pingmian/82668.shtml
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!



)





——HTTP Server功能)
)

![[CARLA系列--03]如何打包生成CARLA 0.9.15的非编辑版(地图的加载与卸载)](http://pic.xiahunao.cn/[CARLA系列--03]如何打包生成CARLA 0.9.15的非编辑版(地图的加载与卸载))
)


)

