之前的神经网络训练中,为了帮助理解借用了很多的组件,比如训练进度条、可视化的loss下降曲线、权重分布图,运行结束后还可以查看单张图的推理效果。
如果现在有一个交互工具可以很简单的通过按钮完成这些辅助功能那就好了,他就是可视化工具tensorboard
tensorboard的基本操作
1.1 发展历史
TensorBoard 是 TensorFlow 生态中的官方可视化工具,用于实时监控训练过程、可视化模型结构、分析数据分布、对比实验结果等。它通过网页端交互界面,将枯燥的训练日志转化为直观的图表和图像,帮助开发者快速定位问题、优化模型,就像给机器学习模型训练过程装了一个「监控屏幕」。你可以用它直观看到训练过程中的数据变化(比如损失值、准确率)、模型结构、数据分布等,不用盯着一堆枯燥的数字看,对新手非常友好。2019 年后与 PyTorch 兼容,变得更通用了。功能进一步丰富,比如支持3D 可视化、模型参数调试等。我们目前只需要要用到最经典的几个功能即可
- 保存模型结构图
- 保存训练集和验证集的loss变化曲线,不需要手动打印了
- 保存每一个层结构权重分布
- 保存预测图片的预测信息
1.2 tensorboard的原理
TensorBoard 的核心原理就是在训练过程中,把训练过程中的数据(比如损失、准确率、图片等)先记录到日志文件里,再通过工具把这些日志文件可视化成图表,这样就不用自己手动打印数据或者用其他工具画图。
所以核心就是2个步骤:
- 数据怎么存?—— 先写日志文件
训练模型时,TensorBoard 会让程序把训练数据(比如损失值、准确率)和模型结构等信息,写入一个特殊的日志文件(.tfevents 文件)
- 数据怎么看?—— 用网页展示日志
写完日志后,TensorBoard 会启动一个本地网页服务,自动读取日志文件里的数据,用图表、图像、文本等形式展示出来。如果只用 print(损失值) 或者自己用 matplotlib 画图,不仅麻烦,还得手动保存数据、写代码。而 TensorBoard 能自动把这些数据 “存下来 + 画出来”,还能生成网页版的可视化界面,随时刷新查看!
下面是tensorboard的核心代码解析,无需运行 看懂大概在做什么即可
1.3 日志目录自动管理
log_dir = 'runs/cifar10_mlp_experiment'
if os.path.exists(log_dir):i = 1while os.path.exists(f"{log_dir}_{i}"):i += 1log_dir = f"{log_dir}_{i}" #一个编号有了就赶紧生成下一个
writer = SummaryWriter(log_dir) #关键入口,用于写入数据到日志目录自动避免日志目录重复。若 runs/cifar10_mlp_experiment 已存在,会生成 runs/cifar10_mlp_experiment_1、_2 等新目录,确保每次训练的日志独立存储。
方便对比不同训练任务的结果(如不同超参数实验)
1.4 记录标量数据(Scalar)
# 记录每个 Batch 的损失和准确率
writer.add_scalar('Train/Batch_Loss', batch_loss, global_step)
writer.add_scalar('Train/Batch_Accuracy', batch_acc, global_step)# 记录每个 Epoch 的训练指标
writer.add_scalar('Train/Epoch_Loss', epoch_train_loss, epoch)
writer.add_scalar('Train/Epoch_Accuracy', epoch_train_acc, epoch)在 tensorboard的SCALARS 选项卡中查看曲线,支持多 run 对比?。
1.5 可视化模型结构(Graph)
dataiter = iter(train_loader)
images, labels = next(dataiter)
images = images.to(device)
writer.add_graph(model, images) # 通过真实输入样本生成模型计算图TensorBoard 界面:在 GRAPHS 选项卡中查看模型层次结构(卷积层、全连接层等)。
1.6 可视化图像(Image)
# 可视化原始训练图像
img_grid = torchvision.utils.make_grid(images[:8].cpu()) # 将多张图像拼接成网格状(方便可视化),将前8张图像拼接成一个网格
writer.add_image('原始训练图像', img_grid)# 可视化错误预测样本(训练结束后)
wrong_img_grid = torchvision.utils.make_grid(wrong_images[:display_count])
writer.add_image('错误预测样本', wrong_img_grid)展示原始图像、数据增强效果、错误预测样本等。
1.7 记录权重和梯度直方图(Histogram)
if (batch_idx + 1) % 500 == 0:for name, param in model.named_parameters():writer.add_histogram(f'weights/{name}', param, global_step) # 权重分布if param.grad is not None:writer.add_histogram(f'grads/{name}', param.grad, global_step) # 梯度分布在 HISTOGRAMS 选项卡中查看不同层的参数分布随训练的变化。监控模型参数(如权重 weights)和梯度(grads)的分布变化,诊断训练问题(如梯度消失 / 爆炸)。
1.8 启动tensorboard
运行代码后,会在指定目录(如 runs/cifar10_mlp_experiment_1)生成 .tfevents 文件,存储所有 TensorBoard 数据。
在终端执行(需进入项目根目录):
tensorboard --logdir=runs # 假设日志目录在 runs/ 下
打开浏览器,输入终端提示的 URL(通常为 http://localhost:6006)。
二、tensorboard实战
2.1 cifar-10 MLP实战
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
import numpy as np
import matplotlib.pyplot as plt
import os# 设置随机种子以确保结果可复现
torch.manual_seed(42)
np.random.seed(42)# 1. 数据预处理
transform = transforms.Compose([transforms.ToTensor(), # 转换为张量transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)) # 标准化处理
])# 2. 加载CIFAR-10数据集
train_dataset = datasets.CIFAR10(root='./data',train=True,download=True,transform=transform
)test_dataset = datasets.CIFAR10(root='./data',train=False,transform=transform
)# 3. 创建数据加载器
batch_size = 64
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=batch_size, shuffle=False)# CIFAR-10的类别名称
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')# 4. 定义MLP模型(适应CIFAR-10的输入尺寸)
class MLP(nn.Module):def __init__(self):super(MLP, self).__init__()self.flatten = nn.Flatten() # 将3x32x32的图像展平为3072维向量self.layer1 = nn.Linear(3072, 512) # 第一层:3072个输入,512个神经元self.relu1 = nn.ReLU()self.dropout1 = nn.Dropout(0.2) # 添加Dropout防止过拟合self.layer2 = nn.Linear(512, 256) # 第二层:512个输入,256个神经元self.relu2 = nn.ReLU()self.dropout2 = nn.Dropout(0.2)self.layer3 = nn.Linear(256, 10) # 输出层:10个类别def forward(self, x):# 第一步:将输入图像展平为一维向量x = self.flatten(x) # 输入尺寸: [batch_size, 3, 32, 32] → [batch_size, 3072]# 第一层全连接 + 激活 + Dropoutx = self.layer1(x) # 线性变换: [batch_size, 3072] → [batch_size, 512]x = self.relu1(x) # 应用ReLU激活函数x = self.dropout1(x) # 训练时随机丢弃部分神经元输出# 第二层全连接 + 激活 + Dropoutx = self.layer2(x) # 线性变换: [batch_size, 512] → [batch_size, 256]x = self.relu2(x) # 应用ReLU激活函数x = self.dropout2(x) # 训练时随机丢弃部分神经元输出# 第三层(输出层)全连接x = self.layer3(x) # 线性变换: [batch_size, 256] → [batch_size, 10]return x # 返回未经过Softmax的logits# 检查GPU是否可用
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")# 初始化模型
model = MLP()
model = model.to(device) # 将模型移至GPU(如果可用)criterion = nn.CrossEntropyLoss() # 交叉熵损失函数
optimizer = optim.Adam(model.parameters(), lr=0.001) # Adam优化器# 创建TensorBoard的SummaryWriter,指定日志保存目录
log_dir = 'runs/cifar10_mlp_experiment'
# 如果目录已存在,添加后缀避免覆盖
if os.path.exists(log_dir):i = 1while os.path.exists(f"{log_dir}_{i}"):i += 1log_dir = f"{log_dir}_{i}"
writer = SummaryWriter(log_dir)# 5. 训练模型(使用TensorBoard记录各种信息)
def train(model, train_loader, test_loader, criterion, optimizer, device, epochs, writer):model.train() # 设置为训练模式# 记录训练开始时间,用于计算训练速度global_step = 0# 可视化模型结构dataiter = iter(train_loader)images, labels = next(dataiter)images = images.to(device)writer.add_graph(model, images) # 添加模型图# 可视化原始图像样本img_grid = torchvision.utils.make_grid(images[:8].cpu())writer.add_image('原始训练图像', img_grid)for epoch in range(epochs):running_loss = 0.0correct = 0total = 0for batch_idx, (data, target) in enumerate(train_loader):data, target = data.to(device), target.to(device) # 移至GPUoptimizer.zero_grad() # 梯度清零output = model(data) # 前向传播loss = criterion(output, target) # 计算损失loss.backward() # 反向传播optimizer.step() # 更新参数# 统计准确率和损失running_loss += loss.item()_, predicted = output.max(1)total += target.size(0)correct += predicted.eq(target).sum().item()# 每100个批次记录一次信息到TensorBoardif (batch_idx + 1) % 100 == 0:batch_loss = loss.item()batch_acc = 100. * correct / total# 记录标量数据(损失、准确率)writer.add_scalar('Train/Batch_Loss', batch_loss, global_step)writer.add_scalar('Train/Batch_Accuracy', batch_acc, global_step)# 记录学习率writer.add_scalar('Train/Learning_Rate', optimizer.param_groups[0]['lr'], global_step)# 每500个批次记录一次直方图(权重和梯度)if (batch_idx + 1) % 500 == 0:for name, param in model.named_parameters():writer.add_histogram(f'weights/{name}', param, global_step)if param.grad is not None:writer.add_histogram(f'grads/{name}', param.grad, global_step)print(f'Epoch: {epoch+1}/{epochs} | Batch: {batch_idx+1}/{len(train_loader)} 'f'| 单Batch损失: {batch_loss:.4f} | 累计平均损失: {running_loss/(batch_idx+1):.4f}')global_step += 1# 计算当前epoch的平均训练损失和准确率epoch_train_loss = running_loss / len(train_loader)epoch_train_acc = 100. * correct / total# 记录每个epoch的训练损失和准确率writer.add_scalar('Train/Epoch_Loss', epoch_train_loss, epoch)writer.add_scalar('Train/Epoch_Accuracy', epoch_train_acc, epoch)# 测试阶段model.eval() # 设置为评估模式test_loss = 0correct_test = 0total_test = 0# 用于存储预测错误的样本wrong_images = []wrong_labels = []wrong_preds = []with torch.no_grad():for data, target in test_loader:data, target = data.to(device), target.to(device)output = model(data)test_loss += criterion(output, target).item()_, predicted = output.max(1)total_test += target.size(0)correct_test += predicted.eq(target).sum().item()# 收集预测错误的样本wrong_mask = (predicted != target).cpu()if wrong_mask.sum() > 0:wrong_batch_images = data[wrong_mask].cpu()wrong_batch_labels = target[wrong_mask].cpu()wrong_batch_preds = predicted[wrong_mask].cpu()wrong_images.extend(wrong_batch_images)wrong_labels.extend(wrong_batch_labels)wrong_preds.extend(wrong_batch_preds)epoch_test_loss = test_loss / len(test_loader)epoch_test_acc = 100. * correct_test / total_test# 记录每个epoch的测试损失和准确率writer.add_scalar('Test/Loss', epoch_test_loss, epoch)writer.add_scalar('Test/Accuracy', epoch_test_acc, epoch)# 计算并记录训练速度(每秒处理的样本数)# 这里简化处理,假设每个epoch的时间相同samples_per_epoch = len(train_loader.dataset)# 实际应用中应该使用time.time()来计算真实时间print(f'Epoch {epoch+1}/{epochs} 完成 | 训练准确率: {epoch_train_acc:.2f}% | 测试准确率: {epoch_test_acc:.2f}%')# 可视化预测错误的样本(只在最后一个epoch进行)if epoch == epochs - 1 and len(wrong_images) > 0:# 最多显示8个错误样本display_count = min(8, len(wrong_images))wrong_img_grid = torchvision.utils.make_grid(wrong_images[:display_count])# 创建错误预测的标签文本wrong_text = []for i in range(display_count):true_label = classes[wrong_labels[i]]pred_label = classes[wrong_preds[i]]wrong_text.append(f'True: {true_label}, Pred: {pred_label}')writer.add_image('错误预测样本', wrong_img_grid)writer.add_text('错误预测标签', '\n'.join(wrong_text), epoch)# 关闭TensorBoard写入器writer.close()return epoch_test_acc # 返回最终测试准确率# 6. 执行训练和测试
epochs = 20 # 训练轮次
print("开始训练模型...")
print(f"TensorBoard日志保存在: {log_dir}")
print("训练完成后,使用命令 `tensorboard --logdir=runs` 启动TensorBoard查看可视化结果")final_accuracy = train(model, train_loader, test_loader, criterion, optimizer, device, epochs, writer)
print(f"训练完成!最终测试准确率: {final_accuracy:.2f}%")TensorBoard日志保存在: runs/cifar10_mlp_experiment_1 可以在命令行中进入目前的环境,然后通过tensorboard --logdir=xxxx(目录)即可调出本地链接,点进去就是目前的训练信息,可以不断F5刷新来查看变化。
在TensorBoard界面中,你可以看到:
- SCALARS 选项卡:展示损失曲线、准确率变化、学习率等标量数据----Scalar意思是标量,指只有大小、没有方向的量。
- IMAGES 选项卡:展示原始训练图像和错误预测的样本
- GRAPHS 选项卡:展示模型的计算图结构
- HISTOGRAMS 选项卡:展示模型参数和梯度的分布直方图
2.2 cifar-10 CNN实战
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
import numpy as np
import matplotlib.pyplot as plt
import os# 设置随机种子以确保结果可复现
torch.manual_seed(42)
np.random.seed(42)# 1. 数据预处理
transform = transforms.Compose([transforms.ToTensor(), # 转换为张量transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)) # 标准化处理
])# 2. 加载CIFAR-10数据集
train_dataset = datasets.CIFAR10(root='./data',train=True,download=True,transform=transform
)test_dataset = datasets.CIFAR10(root='./data',train=False,transform=transform
)# 3. 创建数据加载器
batch_size = 64
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=batch_size, shuffle=False)# CIFAR-10的类别名称
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')# 4. 定义MLP模型(适应CIFAR-10的输入尺寸)
class MLP(nn.Module):def __init__(self):super(MLP, self).__init__()self.flatten = nn.Flatten() # 将3x32x32的图像展平为3072维向量self.layer1 = nn.Linear(3072, 512) # 第一层:3072个输入,512个神经元self.relu1 = nn.ReLU()self.dropout1 = nn.Dropout(0.2) # 添加Dropout防止过拟合self.layer2 = nn.Linear(512, 256) # 第二层:512个输入,256个神经元self.relu2 = nn.ReLU()self.dropout2 = nn.Dropout(0.2)self.layer3 = nn.Linear(256, 10) # 输出层:10个类别def forward(self, x):# 第一步:将输入图像展平为一维向量x = self.flatten(x) # 输入尺寸: [batch_size, 3, 32, 32] → [batch_size, 3072]# 第一层全连接 + 激活 + Dropoutx = self.layer1(x) # 线性变换: [batch_size, 3072] → [batch_size, 512]x = self.relu1(x) # 应用ReLU激活函数x = self.dropout1(x) # 训练时随机丢弃部分神经元输出# 第二层全连接 + 激活 + Dropoutx = self.layer2(x) # 线性变换: [batch_size, 512] → [batch_size, 256]x = self.relu2(x) # 应用ReLU激活函数x = self.dropout2(x) # 训练时随机丢弃部分神经元输出# 第三层(输出层)全连接x = self.layer3(x) # 线性变换: [batch_size, 256] → [batch_size, 10]return x # 返回未经过Softmax的logits# 检查GPU是否可用
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")# 初始化模型
model = MLP()
model = model.to(device) # 将模型移至GPU(如果可用)criterion = nn.CrossEntropyLoss() # 交叉熵损失函数
optimizer = optim.Adam(model.parameters(), lr=0.001) # Adam优化器# 创建TensorBoard的SummaryWriter,指定日志保存目录
log_dir = 'runs/cifar10_mlp_experiment'
# 如果目录已存在,添加后缀避免覆盖
if os.path.exists(log_dir):i = 1while os.path.exists(f"{log_dir}_{i}"):i += 1log_dir = f"{log_dir}_{i}"
writer = SummaryWriter(log_dir)# 5. 训练模型(使用TensorBoard记录各种信息)
def train(model, train_loader, test_loader, criterion, optimizer, device, epochs, writer):model.train() # 设置为训练模式# 记录训练开始时间,用于计算训练速度global_step = 0# 可视化模型结构dataiter = iter(train_loader)images, labels = next(dataiter)images = images.to(device)writer.add_graph(model, images) # 添加模型图# 可视化原始图像样本img_grid = torchvision.utils.make_grid(images[:8].cpu())writer.add_image('原始训练图像', img_grid)for epoch in range(epochs):running_loss = 0.0correct = 0total = 0for batch_idx, (data, target) in enumerate(train_loader):data, target = data.to(device), target.to(device) # 移至GPUoptimizer.zero_grad() # 梯度清零output = model(data) # 前向传播loss = criterion(output, target) # 计算损失loss.backward() # 反向传播optimizer.step() # 更新参数# 统计准确率和损失running_loss += loss.item()_, predicted = output.max(1)total += target.size(0)correct += predicted.eq(target).sum().item()# 每100个批次记录一次信息到TensorBoardif (batch_idx + 1) % 100 == 0:batch_loss = loss.item()batch_acc = 100. * correct / total# 记录标量数据(损失、准确率)writer.add_scalar('Train/Batch_Loss', batch_loss, global_step)writer.add_scalar('Train/Batch_Accuracy', batch_acc, global_step)# 记录学习率writer.add_scalar('Train/Learning_Rate', optimizer.param_groups[0]['lr'], global_step)# 每500个批次记录一次直方图(权重和梯度)if (batch_idx + 1) % 500 == 0:for name, param in model.named_parameters():writer.add_histogram(f'weights/{name}', param, global_step)if param.grad is not None:writer.add_histogram(f'grads/{name}', param.grad, global_step)print(f'Epoch: {epoch+1}/{epochs} | Batch: {batch_idx+1}/{len(train_loader)} 'f'| 单Batch损失: {batch_loss:.4f} | 累计平均损失: {running_loss/(batch_idx+1):.4f}')global_step += 1# 计算当前epoch的平均训练损失和准确率epoch_train_loss = running_loss / len(train_loader)epoch_train_acc = 100. * correct / total# 记录每个epoch的训练损失和准确率writer.add_scalar('Train/Epoch_Loss', epoch_train_loss, epoch)writer.add_scalar('Train/Epoch_Accuracy', epoch_train_acc, epoch)# 测试阶段model.eval() # 设置为评估模式test_loss = 0correct_test = 0total_test = 0# 用于存储预测错误的样本wrong_images = []wrong_labels = []wrong_preds = []with torch.no_grad():for data, target in test_loader:data, target = data.to(device), target.to(device)output = model(data)test_loss += criterion(output, target).item()_, predicted = output.max(1)total_test += target.size(0)correct_test += predicted.eq(target).sum().item()# 收集预测错误的样本wrong_mask = (predicted != target).cpu()if wrong_mask.sum() > 0:wrong_batch_images = data[wrong_mask].cpu()wrong_batch_labels = target[wrong_mask].cpu()wrong_batch_preds = predicted[wrong_mask].cpu()wrong_images.extend(wrong_batch_images)wrong_labels.extend(wrong_batch_labels)wrong_preds.extend(wrong_batch_preds)epoch_test_loss = test_loss / len(test_loader)epoch_test_acc = 100. * correct_test / total_test# 记录每个epoch的测试损失和准确率writer.add_scalar('Test/Loss', epoch_test_loss, epoch)writer.add_scalar('Test/Accuracy', epoch_test_acc, epoch)# 计算并记录训练速度(每秒处理的样本数)# 这里简化处理,假设每个epoch的时间相同samples_per_epoch = len(train_loader.dataset)# 实际应用中应该使用time.time()来计算真实时间print(f'Epoch {epoch+1}/{epochs} 完成 | 训练准确率: {epoch_train_acc:.2f}% | 测试准确率: {epoch_test_acc:.2f}%')# 可视化预测错误的样本(只在最后一个epoch进行)if epoch == epochs - 1 and len(wrong_images) > 0:# 最多显示8个错误样本display_count = min(8, len(wrong_images))wrong_img_grid = torchvision.utils.make_grid(wrong_images[:display_count])# 创建错误预测的标签文本wrong_text = []for i in range(display_count):true_label = classes[wrong_labels[i]]pred_label = classes[wrong_preds[i]]wrong_text.append(f'True: {true_label}, Pred: {pred_label}')writer.add_image('错误预测样本', wrong_img_grid)writer.add_text('错误预测标签', '\n'.join(wrong_text), epoch)# 关闭TensorBoard写入器writer.close()return epoch_test_acc # 返回最终测试准确率# 6. 执行训练和测试
epochs = 20 # 训练轮次
print("开始训练模型...")
print(f"TensorBoard日志保存在: {log_dir}")
print("训练完成后,使用命令 `tensorboard --logdir=runs` 启动TensorBoard查看可视化结果")final_accuracy = train(model, train_loader, test_loader, criterion, optimizer, device, epochs, writer)
print(f"训练完成!最终测试准确率: {final_accuracy:.2f}%")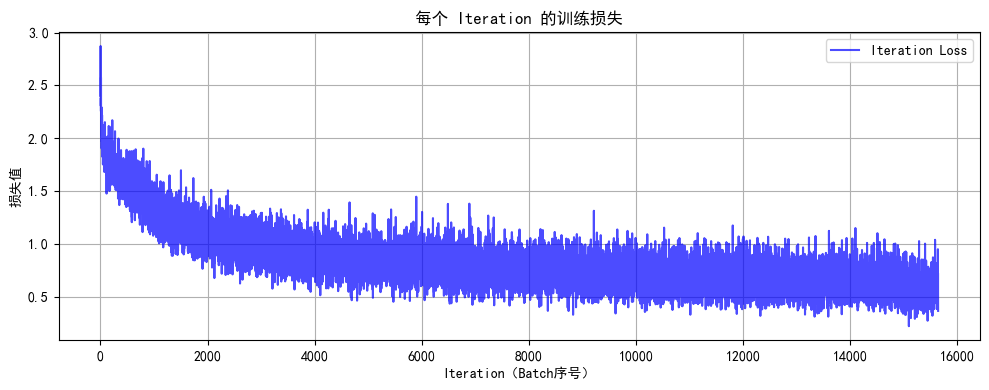
由于已近搭载了tensorboard,上述代码中一些之前可视化的冗余部分可以删除了。
tensorboard的代码还有有一定的记忆量,实际上深度学习的经典代码都是类似于八股文,看多了就习惯了,难度远远小于考研数学等需要思考的内容
实际上对目前的ai而言,你只需要先完成最简单的demo,然后让他给你加上tensorboard需要打印的部分即可。---核心是弄懂tensorboard可以打印什么信息,以及如何看可视化后的结果,把ai当成记忆大师用到的时候通过它来调取对应的代码即可。






——云存储RDS)






)





)