B站 :道传科技上位机 观看教程
一、工业镜头介绍
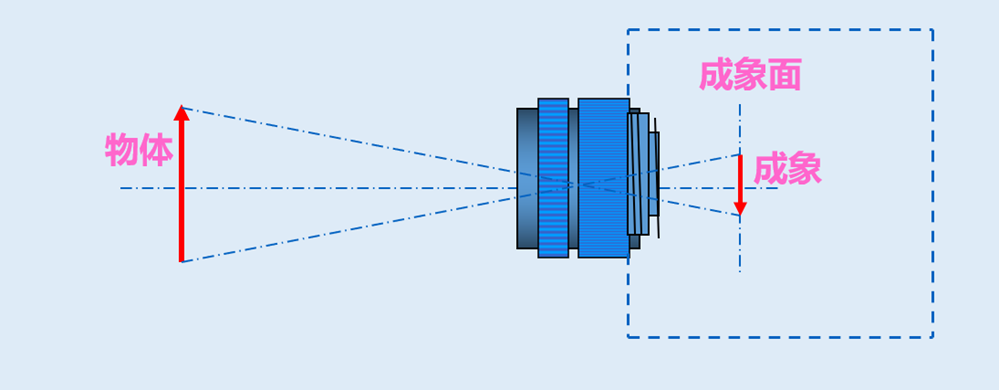
镜头的主要作用是
将目标成像在图像传感器的光敏面上。
下图左一的型号为 焦距 50mm 最大光圈为F1.6 镜头的像面尺寸为2/3英寸(最大能够兼容CCD芯片尺寸)

二、工业镜头的分类
镜头的主要分类是
按功能分类:定焦镜头、变焦镜头
按视角分类:标准镜头、广角镜头、远摄镜头
按焦距分类:短焦距镜头、中焦距镜头、长焦距镜头
按用途分类:普通镜头、微距镜头、远心镜头
三、关键参数讲解
镜头工作距离(WD)
一般是指 镜头物方端面 到 被拍摄物体表面 的物理距离。
光源工作距离(LWD)
一般是指 光源物方端面 到 被照射物体表面 的物理距离。
视场(FOV)
也称视野,是指能被视觉系统观察到的物方可视范围大小
对于镜头而言,可观察到的视场跟镜头放大倍率及相机芯片选择有关。因此通常建议根据被观察物体的尺寸,先确定所需的视场,再确定相机芯片尺寸及镜头放大倍率。在实际工程项目中,考虑到机械误差等问题,视场通常要大于待观测物体的实际尺寸,以确保在机械误差的范围内,物体始终位于视觉系统的可视范围内。
光学放大倍率
机器视觉行业里提到的镜头光学放大倍率通常是指垂轴放大倍率,即像和物的大小之比,计算方法如下:
光学放大倍率=感光芯片长边/视野长边
可见,光学放大倍率和所选相机芯片及所需视场相关。
如:已知相机芯片为2/3英寸(8.8mm*6.6mm),
视场长宽为:10mm* 8mm。
如用长边计算,放大倍率=8.8mm/10mm=0.88x;
如用短边计算,放大倍率=6.6mm/8mm=0.825x;
此时应取小的倍率0.825x 作为待选镜头的光学放大倍率。否则,短边视场将不能满足要求。(若取0.88倍,则短边视场=6.6mm/0.88x=7.5mm<8mm)
四、关键参数讲解
相机芯片尺寸
在前面描述放大倍率和镜头像面尺寸时都涉及到相机芯片尺寸。通常相机厂商是以英寸的形式表示的,但在实际计算时,需要换算成各边以毫米为单位的计量方式。
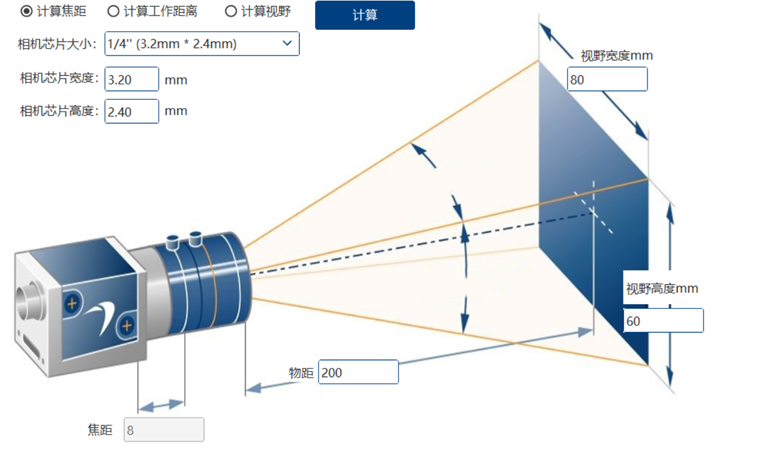
工业镜头的焦距(f mm)可以根据FOV(视场), WD(工作距离) 和CCD芯片尺寸计算出来:
焦距计算公式
焦距f = WD × CCD芯片尺寸( h or v) / FOV( H or V)
下面是常见的CCD芯片
1.1英寸——靶面尺寸为宽12mm*高12mm,对角线17mm
1英寸 ——靶面尺寸为宽12.7mm*高9.6mm,对角线16mm
2/3英寸——靶面尺寸为宽8.8mm*高6.6mm,对角线11mm
1/1.8英寸——靶面尺寸为宽7.2mm*高5.4mm,对角线9mm
1/2英寸——靶面尺寸为宽6.4mm*高4.8mm,对角线8mm
1/3英寸——靶面尺寸为宽4.8mm*高3.6mm,对角线6mm
1/4英寸——靶面尺寸为宽3.2mm*高2.4mm,对角线4m
f:镜头焦距 H: FOV高度尺寸 V: FOV宽度尺寸 WD:镜头至景物距离 v: CCD芯片宽度尺寸 h: CCD芯片高度尺寸
五、关键参数讲解
畸变
镜头在成像时,特别是用短焦距镜头拍摄大视场,图像会产生形变,这种情况叫做镜头的畸变,这是由于镜头的光学结构和成像特性导致的,原因是由于视野中局部放大倍数不一致造成的图像扭曲。拍摄的视场越大,所用的镜头的焦距越短,畸变的程度就越明显,一般有桶型畸变和枕型畸变两种,可以通过图像标定减弱这种平面畸变的影响。
景深
景深则是镜头另一个重要的外部参数。它表示满足图像清晰度要求的最远位置与最近位置的差值,景深的计算可能会相对麻烦一些。它与镜头焦距、光圈值、工作距离和允许弥散斑的最大直径有关。由于允许弥散斑的最大直径是个相对量,它的可接受直径很大程度上取决于应用,因此在实际视觉应用中以实验和参考镜头给出的参考值为主。
简单的说:光圈越小,景深越深;焦距越短,景深越深;对焦距离(工作距离)越远,景深越深;
视场角
以镜头为顶点,被测目标物像可通过镜头的最大范围的两条边缘构成的夹角,称为视场角。它决定了光学仪器(如相机、显微镜等)的视野范围。
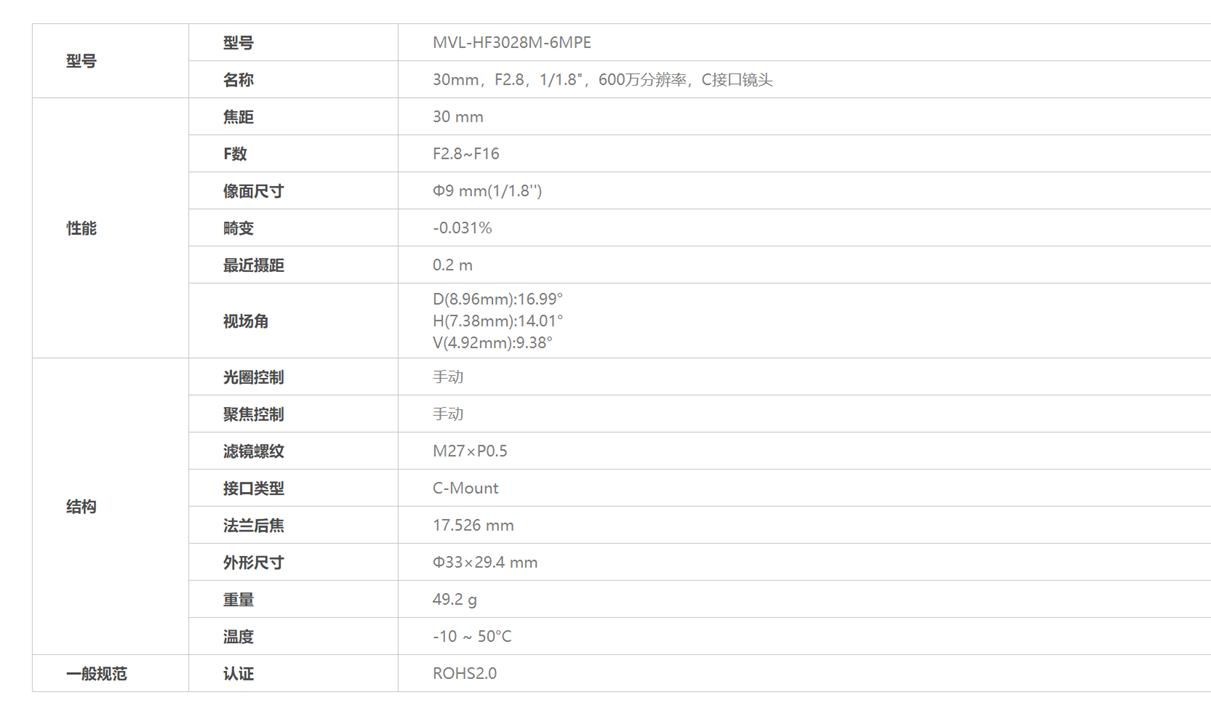
六、镜头的详细硬件参数
七、镜头的接口
按接口的不同,镜头可分为 C - MOUNT 和 CS - MOUNT 。
( 1) C - MOUNT
C - MOUNT 即 C 接口镜头,是目前机器视觉系统中使用最广泛的镜头、具有重量轻、体积小、价廉、品种多等优点,它的接口螺纹参数为:公称直径=1英寸,爆距=32牙(1-32UN)。
(2) CS - MOUNT
CS - MOUNT 即 CS 接口,是为新的 CCD 相机而设计的。随着 CCD 集成度越来越高,相同分辨率的光敏阵列越来越小,设计的 CS - MOUNT 更适用于有效光敏传感器尺寸更小的相机。
除了普遍的 C 接口和 CS 接口外,还有用于大分辨率面阵相机及线阵相机的 F 接M2接口,M72接口及用于靶面较大或特殊镜头的 V 接口。 F 接口是尼康镜头的接口标准,又称尼康口,一般靶面尺寸大约为1英寸的工业相机需要用 F 接口的镜头。
C 接口和 CS 接口的区别仅仅在于镜头的安装基准面到焦点的距离不同。 C 接口的距离是17.526 mm ,而 CS 接口是12.5mm。它们之间相差约5mm。因此,具有 CS 接口的相机,可以与 C 接口或 CS 接口的镜头连接,但使用 C 接口镜头时需加装一个接圈;具有 C 接口的相机只能与 C 接口的镜头连接,而不能与 CS 接口的镜头连接,否则不但不能获得良好的聚焦,还有可能损坏 CCD 靶面(部分 C 接口相机可以拧掉接圈转换成 CS 接口)。但有一个例外,即 C 接口的3CCD相机不能和 C 接口的镜头协同工作。
八、远心镜头
远心镜头( Telecentric )主要是为纠正传统工业镜头视差而设计的,它可以在一定的物距范围内,使得到的图像放大倍数不会变化,这对被测物体不在同一物面上的情况是非常重要的。远心镜头由于其特有的平行光路设计,一直被对镜头畸变要求很高的机器视觉应用场合所青睐。设计远心镜头的目的是消除由于被测物体(或 CCD 芯片)与镜头距离不一致,造成放大倍率不同的影响。
远心镜头的选择
远心镜头和相机的匹配选择原则和普通工业镜头相同,只要其镜头的规格大于或等于相机的靶面即可。使用过程中需注意,在远心镜头的物镜垂直下方区域内的像都是远心成像,而超出此区域的像就不是严格意义上的远心成像了,这点在实际的使用中一定要注意,否则会产生不必要的偏差。基于远心镜头的原理特征及独特优势,在以下六种情况下,最好选用远心镜头:
(1)需要检测有厚度的物体(厚度>FOV直径/10)
(2)需要检测不在同一平面的物体。
(3)物体到镜头的距离未知。
(4)需要检测带孔径的三维物体。
(5)需要低畸变率且图像的亮度完全一致。
(6)缺陷只在同一方向平行照明下才能检测到。
根据使用情况(物体尺寸和需要的分辨率)选择物方尺寸(拍摄范围)合适的物方镜头和 CCD 或 CMOS 相机,同时结合像方尺寸(使用 CCD 的靶面大小)即可计算出放大倍数,然后选择合适的像方镜头。在选择过程中,还应注意景深指标的影响,因为像/物倍数越大,景深越小。为了得到合适的景深,可能还需要重新选择镜头。
九、选型案例
案例分析:
已知条件:工业相机型号已经选择好,具体参数:工业相机芯片尺寸为2/3",C接口,5百万像素;
视野是100*100mm, 工作距离:500mm;
根据以上条件,我们来选择合适的工业镜头;
镜头接口: 首先工业镜头要和工业相机接口一致,所以这里也选择C接口;
镜头大小: 遵循镜头大小要大于相机的芯片大小,所以这里镜头尺寸最少支持2/3";
镜头分辨率: 镜头的分辨率要高于相机的分辨率,所以选择5百万像素以上;
焦距: 500(工作距离)× 8.8(芯片水平长度)/ 100(视野)=44mm;
镜头放大倍率: 8.8(芯片水平长度)/ 100=0.088
B站 :道传科技上位机 观看教程视频


![2025年渗透测试面试题总结-天翼电子公司[社招]安全运营岗(题目+回答)](http://pic.xiahunao.cn/2025年渗透测试面试题总结-天翼电子公司[社招]安全运营岗(题目+回答))

之浏览器渲染应用及内存释放的关联与应用)


)








算法类cv::cuda::OpticalFlowDual_TVL1)


