在之前的文章里,我们掌握了无设备树和有设备树这两种 platform 驱动的开发方式。
但实际上有现成的,Linux 内核的 LED 灯驱动采用 platform 框架,我们只需要按照要求在设备树文件中添加相应的 LED 节点即可。
本讲内容,我们就来学习如何使用 Linux 内核自带的 LED 驱动,来驱动 I.MX6U-ALPHA 开发板上的 LED0。
LED 驱动使能
要使用 Linux 内核自带的 LED 灯驱动首先得先配置 Linux 内核,使能自带的 LED 灯驱动。
输入如下命令打开 Linux 配置菜单:
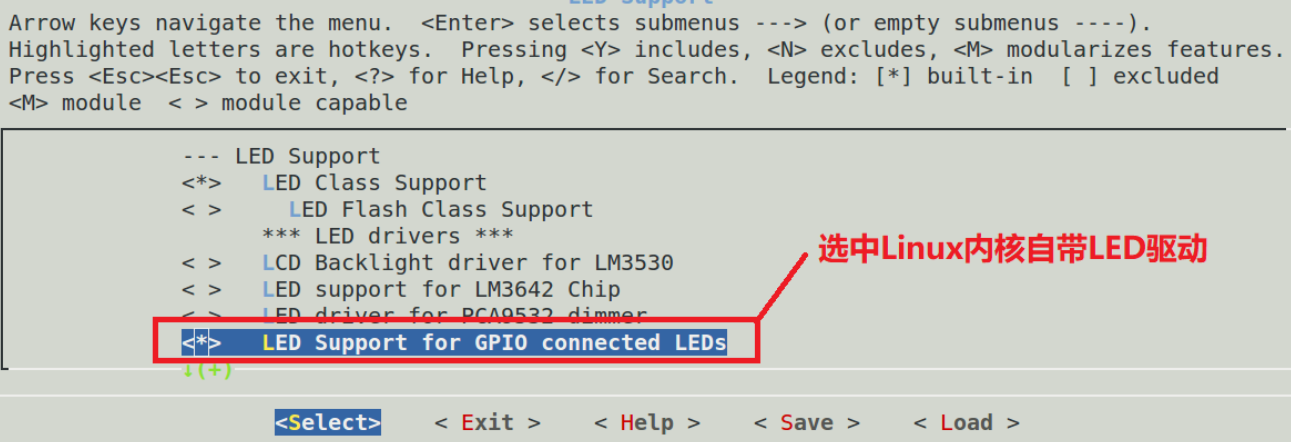
make menuconfig按照如下路径打开 LED 驱动配置项:

选择“LED Support for GPIO connected LEDs”,按下“Y”键,将其编译进 Linux 内核,也即是在此选项上,如图:
在“LED Support for GPIO connected LEDs”上按下‘?’ 可以打开此选项的帮助信息:
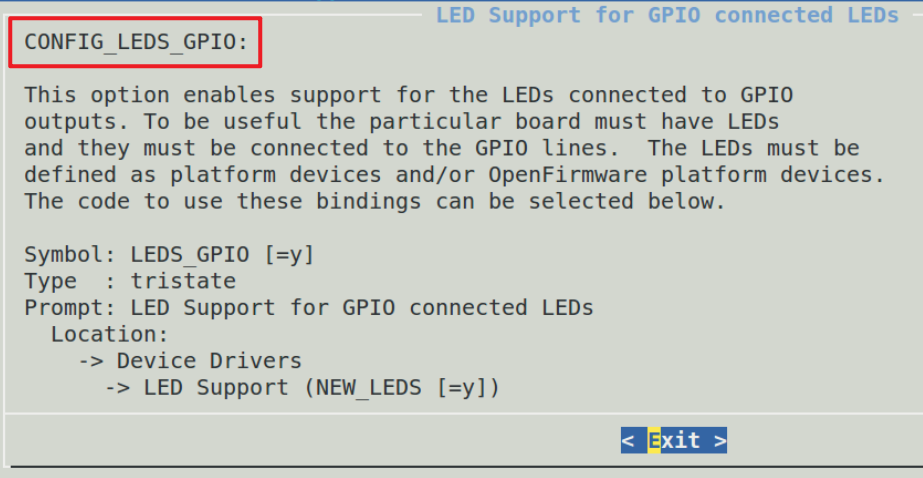
把 Linux 内部自带的LED 灯驱动编译进内核以后 ,CONFIG_LEDS_GPIO 就会等于‘y’。
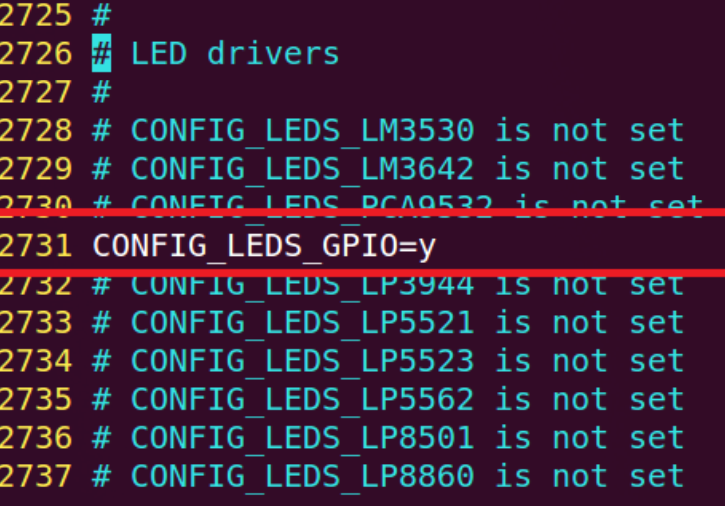
配置好 Linux 内核以后退出配置界面,打开.config 文件,搜索“CONFIG_LEDS_GPIO=y”:
重新编译 Linux 内核,然后使用新编译出来的 zImage 镜像启动开发板。
LED 驱动分析
驱动框架
LED 灯驱动文件为/drivers/leds/leds-gpio.c,打开/drivers/leds/Makefile文件,可以发现:
obj-$(CONFIG_LEDS_GPIO) += leds-gpio.o如果定义了 CONFIG_LEDS_GPIO 的话,就会编译 leds-gpio.c 这个文件,通过图形化界面我们已经使能LED,因此 leds-gpio.c 驱动文件就会被编译。
打开 leds-gpio.c 这个驱动文件,采用了 platform 框架:
static const struct of_device_id of_gpio_leds_match[] = {{ .compatible = "gpio-leds", },{},
};
......static struct platform_driver gpio_led_driver = {.probe = gpio_led_probe,.remove = gpio_led_remove,.driver = {.name = "leds-gpio",.of_match_table = of_gpio_leds_match,},
};module_platform_driver(gpio_led_driver);LED 驱动的匹配表,compatible 内容为“gpio-leds”,因此设备树中的 LED 灯设备节点的 compatible 属性值也要为“gpio-leds”,否则设备和驱动匹配不成功,驱动就没法工作。
probe 函数为 gpio_led_probe,驱动名字为“leds-gpio”,当驱动和设备匹配成功以后 gpio_led_probe 函数就会执行。
在/sys/bus/platform/drivers 目录下,存在一个名为“leds-gpio”的文件,如图:

通过 module_platform_driver 函数,向 Linux 内核注册 gpio_led_driver 这个 platform驱动。
module_platform_driver(gpio_led_driver);module_platform_driver 函数
在 Linux 内核中,会大量采用 module_platform_driver 来完成向 Linux 内核注册 platform 驱动的操作。
module_platform_driver 定义在 include/linux/platform_device.h 文件中,为一个宏,定义如下:
#define module_platform_driver(__platform_driver) \module_driver(__platform_driver, platform_driver_register, \platform_driver_unregister)可以看出, module_platform_driver 依赖 module_driver, module_driver 也是一个宏。
module_driver 定义在include/linux/device.h 文件中,内容如下:
#define module_driver(__driver, __register, __unregister, ...) \static int __init __driver##_init(void) \{ \return __register(&(__driver), ##__VA_ARGS__); \} \module_init(__driver##_init); \static void __exit __driver##_exit(void) \{ \__unregister(&(__driver), ##__VA_ARGS__); \} \module_exit(__driver##_exit)将module_platform_driver函数完全展开,也就是:
static int __init gpio_led_driver_init(void)
{return platform_driver_register (&(gpio_led_driver));
}
module_init(gpio_led_driver_init);static void __exit gpio_led_driver_exit(void)
{platform_driver_unregister (&(gpio_led_driver) );
}module_exit(gpio_led_driver_exit);因此 module_platform_driver 函数的功能,就是完成 platform 驱动的注册和删除。
gpio_led_probe 函数
当驱动和设备匹配以后 gpio_led_probe 函数就会执行,此函数主要是从设备树中获取 LED灯的 GPIO 信息。
gpio_led_probe 函数,缩减后的函数内容如下所示:
/*** gpio_led_probe - GPIO LED驱动的探测函数* @pdev: 匹配到的平台设备** 此函数在驱动与设备匹配成功后调用,负责初始化LED设备。* 支持传统platform_data和设备树两种配置方式。*/
static int gpio_led_probe(struct platform_device *pdev)
{struct gpio_led_platform_data *pdata = dev_get_platdata(&pdev->dev);struct gpio_leds_priv *priv;int i, ret = 0;/* 检查并使用平台数据(传统非设备树方式) */if (pdata && pdata->num_leds) {/* 获取platform_device信息 */......} else { /* 设备树方式初始化 */priv = gpio_leds_create(pdev);if (IS_ERR(priv))return PTR_ERR(priv);}/* 将私有数据保存到设备结构 */platform_set_drvdata(pdev, priv);return 0;
}如果使用设备树的话,使用 gpio_leds_create 函数从设备树中提取设备信息,获取到的 LED 灯 GPIO 信息保存在返回值中。
gpio_leds_create 函数内容如下:
/*** gpio_leds_create - 从设备树创建GPIO LED设备* @pdev: 平台设备指针** 该函数解析设备树节点,为每个子节点创建对应的LED设备* 返回包含所有LED的私有数据结构,错误时返回ERR_PTR*/
static struct gpio_leds_priv *gpio_leds_create(struct platform_device *pdev)
{struct device *dev = &pdev->dev;struct fwnode_handle *child; // 设备树子节点句柄struct gpio_leds_priv *priv;int count, ret;struct device_node *np;/* 1. 获取子节点数量 */count = device_get_child_node_count(dev);if (!count)return ERR_PTR(-ENODEV); // 无有效子节点/* 2. 分配私有数据结构内存 */priv = devm_kzalloc(dev, sizeof_gpio_leds_priv(count), GFP_KERNEL);if (!priv)return ERR_PTR(-ENOMEM); // 内存分配失败/* 3. 遍历所有子节点 */device_for_each_child_node(dev, child) {struct gpio_led led = {};const char *state = NULL;/* 3.1 获取GPIO描述符 */led.gpiod = devm_get_gpiod_from_child(dev, NULL, child);if (IS_ERR(led.gpiod)) {fwnode_handle_put(child);ret = PTR_ERR(led.gpiod);goto err; // GPIO获取失败跳转错误处理}np = of_node(child); // 获取设备树节点/* 3.2 解析LED名称(label属性优先) */if (fwnode_property_present(child, "label")) {fwnode_property_read_string(child, "label", &led.name);} else {if (IS_ENABLED(CONFIG_OF) && !led.name && np)led.name = np->name; // 使用节点名作为备选if (!led.name)return ERR_PTR(-EINVAL); // 名称无效}/* 3.3 解析默认触发器 */fwnode_property_read_string(child, "linux,default-trigger",&led.default_trigger);/* 3.4 解析默认状态(on/off/keep) */if (!fwnode_property_read_string(child, "default-state", &state)) {if (!strcmp(state, "keep"))led.default_state = LEDS_GPIO_DEFSTATE_KEEP;else if (!strcmp(state, "on"))led.default_state = LEDS_GPIO_DEFSTATE_ON;elseled.default_state = LEDS_GPIO_DEFSTATE_OFF;}/* 3.5 解析电源管理属性 */if (fwnode_property_present(child, "retain-state-suspended"))led.retain_state_suspended = 1;/* 3.6 创建单个LED设备 */ret = create_gpio_led(&led, &priv->leds[priv->num_leds++],dev, NULL);if (ret < 0) {fwnode_handle_put(child);goto err; // LED创建失败跳转错误处理}}return priv; // 成功返回私有数据err:/* 错误处理:逆向清理已创建的LED设备 */for (count = priv->num_leds - 2; count >= 0; count--)delete_gpio_led(&priv->leds[count]);return ERR_PTR(ret); // 返回错误指针
}- 调用 device_get_child_node_count 函数,统计子节点数量,一般在在设备树中创建一个节点表示 LED 灯,然后在这个节点下面为每个 LED 灯创建一个子节点。因此子节点数量也是 LED 灯的数量。
- 遍历每个子节点,获取每个子节点的信息。
- 获取 LED 灯所使用的 GPIO 信息。
- 读取子节点 label 属性值,因为使用 label 属性作为 LED 的名字。
- 获取“linux,default-trigger”属性值,可以通过此属性设置某个 LED 灯在Linux 系统中的默认功能,比如作为系统心跳指示灯等等。
- 获取“default-state”属性值,也就是 LED 灯的默认状态属性。
- 调用 create_gpio_led 函数,创建 LED 相关的 io,其实就是设置 LED 所使用的 io为输出之类的。 create_gpio_led 函数主要是初始化 led_dat 这个 gpio_led_data 结构体类型变量, led_dat 保存了 LED 的操作函数等内容。
总结,gpio_led_probe 函数主要功能就是获取 LED 灯的设备信息,然后根据这些信息来初始化对应的 IO,设置为输出等。
设备树节点编写
打开文档 Documentation/devicetree/bindings/leds/leds-gpio.txt,文档详细地讲解了 Linux 自带驱动对应的设备树节点该如何编写。
我们在编写设备节点的时候要注意以下几点:
- 创建一个节点表示 LED 灯设备,比如 dtsleds,如果板子上有多个 LED 灯的话每个 LED灯都作为 dtsleds 的子节点。
- dtsleds 节点的 compatible 属性值一定要为“gpio-leds”。
- 设置 label 属性,此属性为可选,每个子节点都有一个 label 属性, label 属性一般表示LED 灯的名字,比如以颜色区分的话就是 red、 green 等等。
- 每个子节点必须要设置 gpios 属性值,表示此 LED 所使用的 GPIO 引脚。
- 可以设置“linux,default-trigger”属性值,也就是设置 LED 灯的默认功能。
- 可以设置“default-state”属性值,可以设置为 on、 off 或 keep,为 on 的时候 LED 灯默认打开,为 off 的话 LED 灯默认关闭,为 keep 的话 LED 灯保持当前模式。
其中,LED 灯的默认功能,可以查阅Documentation/devicetree/bindings/leds/common.txt 这个文档来查看可选功能,比如:
- backlight: LED 灯作为背光。
- default-on: LED 灯打开。
- heartbeat: LED 灯作为心跳指示灯,可以作为系统运行提示灯。
- ide-disk: LED 灯作为硬盘活动指示灯。
- timer: LED 灯周期性闪烁,由定时器驱动,闪烁频率可以修改。
按照上面描述,打开 imx6ull-alientek-emmc.dts文件, 添加如下所示 LED 灯设备节点:
dtsleds {compatible = "gpio-leds";led0 {label = "red";gpios = <&gpio1 3 GPIO_ACTIVE_LOW>;default-state = "off";};
};在 dtsleds 这个节点下只,有一个子节点led0, LED0 名字为 red,默认关闭。
修改完成以后保存,并重新编译设备树:make dtbs,然后用新的设备树启动开发板。
运行测试
用新的zImage 和 imx6ull-alientek-emmc.dtb 启动开发板 , 启动以后查 看/sys/bus/platform/devices/dtsleds 这个目录是否存在。
如果存在的话,进入该目录,如图:

继续进入到 leds 目录中,如图:

可以看出,在 leds 目录下有一个名为“red”子目录,这个子目录的名字就是我们在设备树中设置的 label 属性值。
查看一下系统中有没有“sys/class/leds/red/brightness”这个文件,存在就说明运行正常,输入如下命令测试LED灯:
echo 1 > /sys/class/leds/red/brightness //打开 LED0
echo 0 > /sys/class/leds/red/brightness //关闭 LED0我们也可以设置 LED0 作为系统指示灯,修改设备树文件:在 dtsleds 这个设备节点中加入“linux,default-trigger”属性信息即可,属性值为“heartbeat”,
dtsleds {compatible = "gpio-leds";led0 {label = "red";gpios = <&gpio1 3 GPIO_ACTIVE_LOW>;linux,default-trigger = "heartbeat";default-state = "on";};
};重新编译设备树,使用新的设备树启动 Linux 系统。
启动以后 LED0 就会闪烁,作为系统心跳指示灯,表示系统正在运行。






等级考试试卷-实操题(2021年12月))












、自动目录(修改字体类型)】)