 我们新建capture_drv.c
我们新建capture_drv.c
#include <stdint.h>
#include <stdio.h>
#include "gd32f30x.h"
#include "delay.h"static void GpioInit(void)
{rcu_periph_clock_enable(RCU_GPIOA);gpio_init(GPIOA,GPIO_MODE_IN_FLOATING,GPIO_OSPEED_10MHZ,GPIO_PIN_0);
}static void TimerInit()
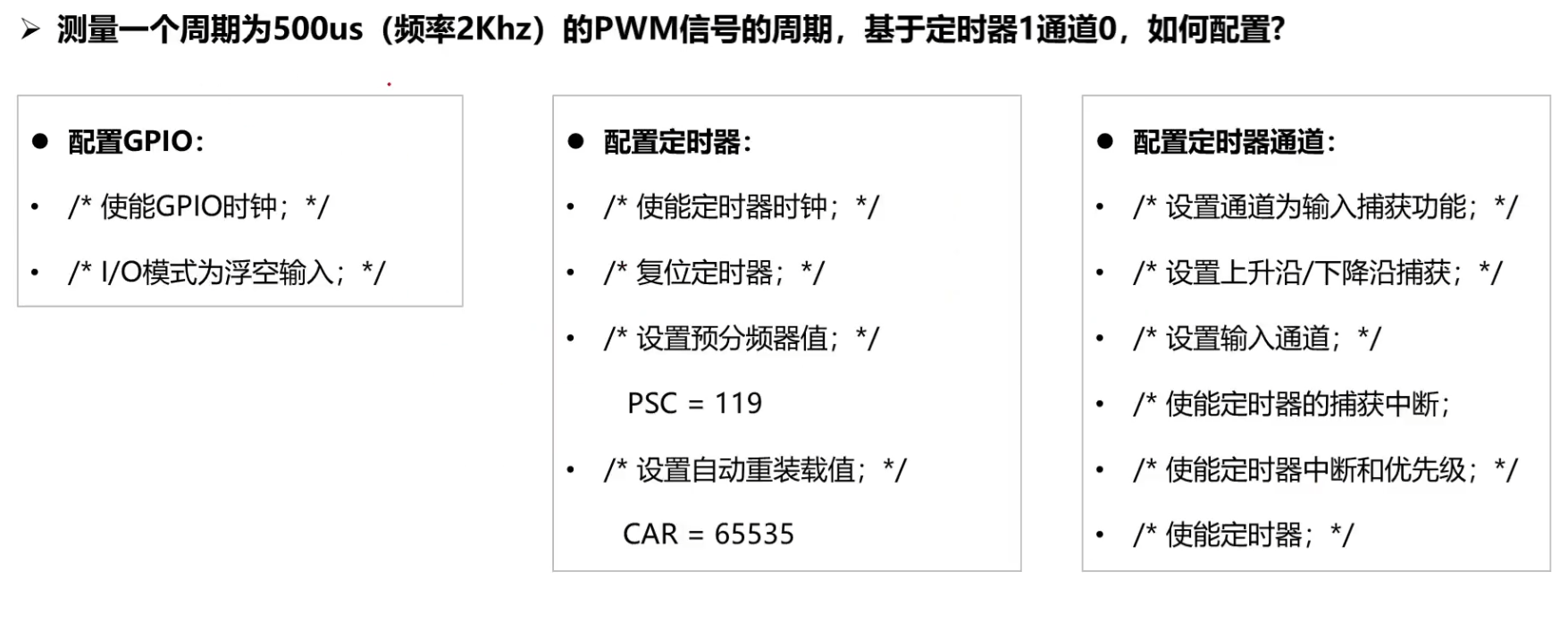
{timer_parameter_struct timerInitPara;timer_struct_para_init(&timerInitPara);//给定时器结构体赋初值/*使能定时器时钟*/rcu_periph_clock_enable(RCU_TIMER1);/*复位定时器*/timer_deinit(TIMER1);/*设置预分频值*/timerInitPara.prescaler = 120 - 1;//时钟频率为1Mhz,周期为1us/*设置自动重装载值*/timerInitPara.period = 65535;/*初始化定时器*/timer_init(TIMER1,&timerInitPara);//给定时器结构体赋初值timer_ic_parameter_struct icInitPara;timer_channel_input_struct_para_init(&icInitPara);/*设置上升沿/下降沿捕获*/icInitPara.icpolarity = TIMER_IC_POLARITY_RISING;/*设置输入通道*/icInitPara.icselection = TIMER_IC_SELECTION_DIRECTTI;timer_input_capture_config(TIMER1,TIMER_CH_0,&icInitPara);/*使能定时器的捕获中断*/timer_interrupt_flag_clear(TIMER1 ,TIMER_INT_FLAG_CH0);//清除中断标志位timer_interrupt_enable(TIMER1,TIMER_INT_CH0);/*使能定时器中断优先级*/nvic_irq_enable(TIMER1_IRQn, 0, 0);/*使能定时器*/timer_enable(TIMER1);
}static uint32_t g_icValue;//1 = 1us
void TIMER1_IRQHandler()
{if(timer_interrupt_flag_get(TIMER1 , TIMER_INT_FLAG_CH0) == SET)//判断是否产生中断{timer_interrupt_flag_clear(TIMER1 , TIMER_INT_FLAG_CH0);//清除中断标志位g_icValue = timer_channel_capture_value_register_read(TIMER1, TIMER_CH_0) + 1;//读取计数值timer_counter_value_config(TIMER1 , 0);//计数器清零}
}void CaptureDrvInit()
{GpioInit();TimerInit();
}void CaptunreDrvTest(void)//测试函数
{printf("period is %d us.\n",g_icValue);DelayNms(500);
}
capture_drv.h
#ifndef _CAPTURE_DRV_H_
#define _CAPTURE_DRV_H_void CaptureDrvInit();
void CaptunreDrvTest(void);//测试函数#endif


![【题解 | 两种做法】洛谷 P4208 [JSOI2008] 最小生成树计数 [矩阵树/枚举]](http://pic.xiahunao.cn/【题解 | 两种做法】洛谷 P4208 [JSOI2008] 最小生成树计数 [矩阵树/枚举])









+ AI:智能工业的未来趋势全解析)





