文章目录
- 一、整体思想
- 二、具体误差建模流程
- 三、总结明确(预测值与观测值)
- 四、选点逻辑
- 五、Sonar 数据处理流水线
- 1. ROS Launch 配置(imagenex831l.launch)
- 2. SonarNode 节点(sonar_node.py)
- 3. Subscriber 订阅与回调(Subscriber.cpp)
- 4. 后端优化接入(Estimator.cpp)
- 5. 总结
- 六、Ceres求解
- 阶段 1:定义并初始化参数块
- 阶段 2:构造残差函数(CostFunction)
- 阶段 3:添加到 Problem(联合注册)
- 阶段 4:配置 Solver 选项
- 阶段 5:调用 Solve 执行优化
- 阶段 6:提取并更新结果
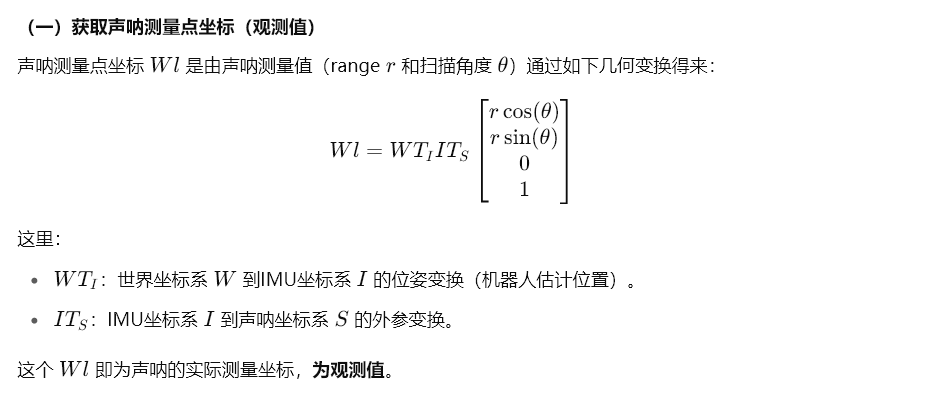
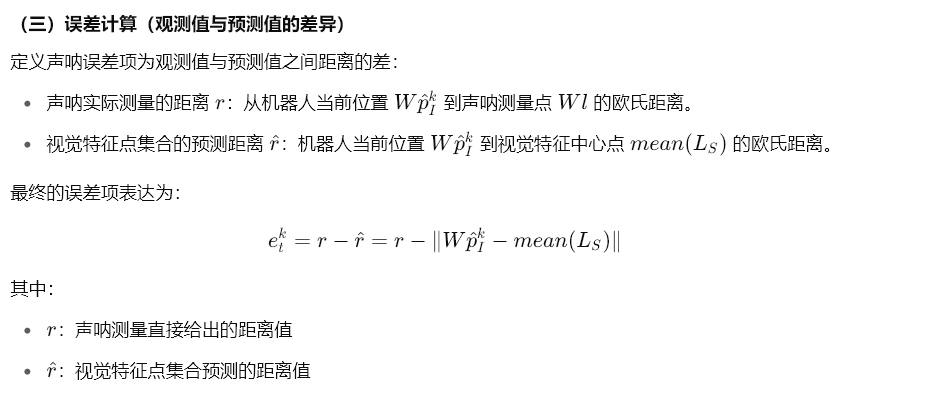
根据论文中给出的DPP-sonar误差计算方法及图示(图6),具体分析声呐误差的计算方式如下:
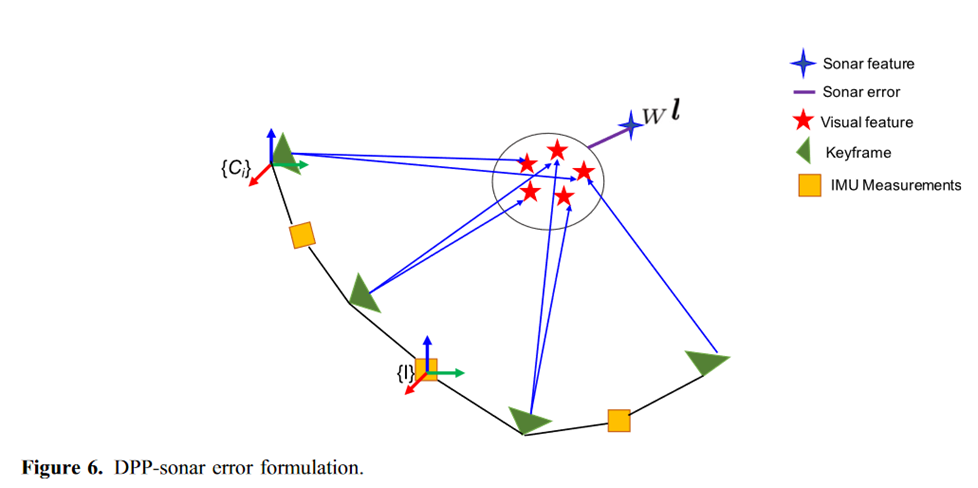
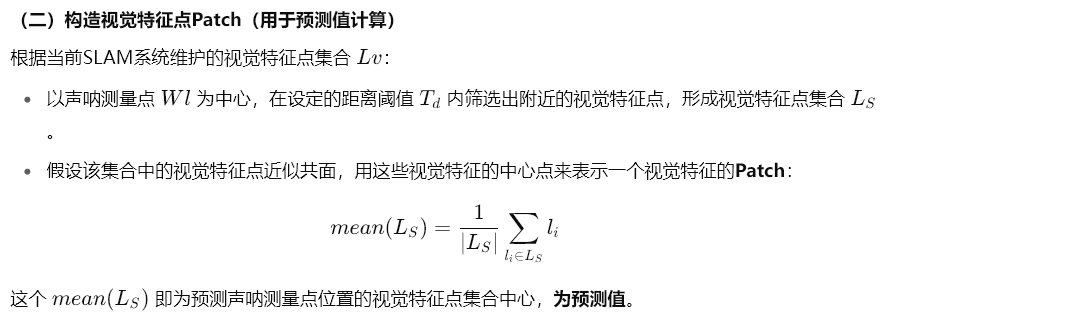
Here, we assume that the visual-feature based patch is small enough and approximately coplanar with the DPP-sonar point.
在这里,我们假设基于视觉功能的贴片足够小,并且与DPP-Sonar点大约是共面的。
一、整体思想
SVIn2方法使用DPP-sonar声呐传感器来辅助视觉特征,从而提高SLAM的精度和鲁棒性。具体而言:
- 声呐能够提供对障碍物的距离测量,不受视觉条件(如浑浊水体、光照变化)影响。
- 声呐的测量点与视觉特征的测量点之间存在一定空间差异,系统通过结合声呐测量点附近的视觉特征(patch)进行误差建模和优化。
二、具体误差建模流程
流程图示如论文图6所示,其中:
- 蓝色星形:声呐测量点
- 红色星形:视觉特征点
- 紫色线段:声呐测量点到视觉特征点群中心(patch)的误差距离
- 三角形绿色:关键帧(相机位置)
- 黄色方形:IMU测量位置
具体步骤如下:
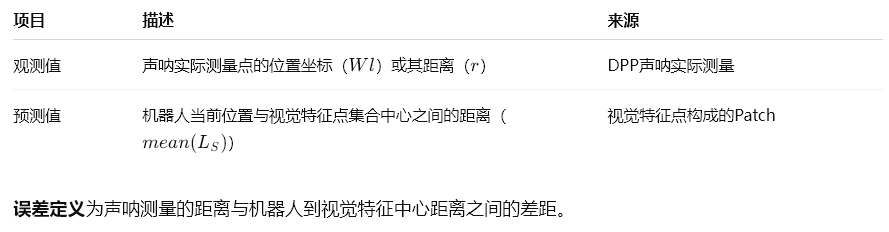
三、总结明确(预测值与观测值)
四、选点逻辑
这整个「从声呐量测→世界坐标下的点→在视觉地标里找候选子集」的逻辑,其实就在 Estimator::addStates(...) 里,当你往 OKVIS 后端里挂声呐因子(SonarError)之前。具体是在这段代码里:
// Estimator::addStates(...)
// (前面省略了 IMU、深度、视觉部分)// ———— Sonar ————
if (sonarMeasurements.size() != 0) {auto last_sonarMeasurement_it = sonarMeasurements.rbegin();double range = last_sonarMeasurement_it->measurement.range;double heading = last_sonarMeasurement_it->measurement.heading;// 1) 把声呐读数〈range, heading〉变成声呐坐标系下的点okvis::kinematics::Transformation sonar_point(Eigen::Vector3d(range * cos(heading),range * sin(heading),0.0),Eigen::Quaterniond(1.0, 0.0, 0.0, 0.0));// 2) 把它从声呐坐标系 T_SSo 換到世界坐标系okvis::kinematics::Transformation T_WSo = T_WS * params.sonar.T_SSo;okvis::kinematics::Transformation T_WSo_point = T_WSo * sonar_point;Eigen::Vector3d sonar_landmark = T_WSo_point.r(); // ← 这就是“世界系下的声呐点”// 3) 在所有视觉地标里找“x,y,z 三个方向都离它不到 0.1m” 的那些点std::vector<Eigen::Vector3d> landmarkSubset;for (auto rit = landmarksMap_.rbegin(); rit != landmarksMap_.rend(); ++rit) {// 把每个视觉地标从齐次坐标转成 3DEigen::Vector3d visual_landmark =(rit->second.point / rit->second.point[3]).head<3>();if (fabs(sonar_landmark[0] - visual_landmark[0]) < 0.1 &&fabs(sonar_landmark[1] - visual_landmark[1]) < 0.1 &&fabs(sonar_landmark[2] - visual_landmark[2]) < 0.1) {landmarkSubset.push_back(visual_landmark);}}// 4) 如果找到了不止一个,就把它们打包,构造一个 SonarErrorif (!landmarkSubset.empty()) {double information_sonar = 1.0;auto sonarError = std::make_shared<ceres::SonarError>(params, range, heading, information_sonar, landmarkSubset);mapPtr_->addResidualBlock(sonarError, NULL, poseParameterBlock);}
}
-
构造世界系下的声呐点:
okvis::kinematics::Transformation sonar_point(...); T_WSo_point = T_WS * params.sonar.T_SSo * sonar_point; Eigen::Vector3d sonar_landmark = T_WSo_point.r(); -
从一个点变成一组候选点:
就是上面对于landmarksMap_的那一小段for循环,所有离sonar_landmark足够近的视觉地标都被 push 进了landmarkSubset。
五、Sonar 数据处理流水线
1. ROS Launch 配置(imagenex831l.launch)
- 功能:启动
imagenex831l/sonar_node.py节点。 - 关键配置:
respawn="true":节点意外退出后自动重启。respawn_delay="30":重启前等待 30s。
2. SonarNode 节点(sonar_node.py)
- 初始化
rospy.init_node('imagenex831l')- 发布两个话题:
imagenex831l/range(处理后数据,ProcessedRange)imagenex831l/range_raw(原始数据,RawRange)
- 启动
dynamic_reconfigure服务器,支持运行时修改驱动参数。
- 参数回调
- 在
parameters_callback()中,将config下发给驱动并返回更新后的配置。
- 在
- 主循环 (
spin())- 按设定频率
poll_frequency读传感器:- 调用
sensor.send_request()和sensor.read_data()获取原始字节。 - 发布
RawRange:填充header、data。 - 调用
sensor.interpret_data()解析成ProcessedRange。 - 发布到
imagenex831l/range。
- 调用
- 若多次读取异常且超过
RESET_TIMEOUT,调用rospy.signal_shutdown()。
- 按设定频率
- 清理
- 节点退出前,调用
sensor.close_connection()关闭串口或网络。
- 节点退出前,调用
3. Subscriber 订阅与回调(Subscriber.cpp)
- 在
setNodeHandle()中:- 订阅
/imagenex831l/range(ProcessedRange)并绑定sonarCallback()。 - 仅在配置
vioParameters_.sensorList.isSonarUsed == true时启用。
- 订阅
- 回调
sonarCallback(const ProcessedRange::ConstPtr& msg):- 量化:
rangeResolution = msg->max_range / msg->intensity.size()。 - 峰值筛选:在前
size-100个 bin 中找最大强度max及其索引maxIndex。 - 距离计算:
range = (maxIndex + 1) * rangeResolution,heading = deg2rad(msg->head_position)。 - 过滤条件:
range < 4.5m且max > 10。 - 注入后端:
vioInterface_->addSonarMeasurement(timestamp, range, heading)。
- 量化:
- 线程同步
- 在
ThreadedKFVio::startThreads()中根据sensorList.isSonarUsed启动sonarConsumerThread_。 - 在
sonarConsumerLoop()中,通过队列sonarMeasurementsReceived_异步消费测量,等待同步器sonarFrameSynchronizer_配合多帧时间戳。
- 在
4. 后端优化接入(Estimator.cpp)
-
状态添加 (
addStates())-
取当前 pose
T_WS。 -
从
sonarMeasurements提取最新一条测量(range, heading)。 -
将测量点转换到世界坐标:
T_WSo = T_WS * params.sonar.T_SSo; point_local = [range*cos(heading), range*sin(heading), 0]; sonar_landmark = (T_WSo * point_local).r(); -
在视觉地标
landmarksMap_中寻找附近(误差 < 0.1m)的关键点集合landmarkSubset。 -
构建
SonarError残差块并mapPtr_->addResidualBlock(sonarError, nullptr, poseBlock)。
-
-
SonarError 类
-
保存:
range_,heading_, 信息矩阵information_, 以及参考地标landmarkSubset_。 -
Evaluate():
-
计算地标几何中心
mean。 -
预测距离
range_pred = ‖T_WS.r() - mean‖。 -
残差
e = range_ - range_pred,加权sqrtInfo * e。 -
计算雅可比:
∂ e / ∂ t = ( T W S . r ( ) − s o n a r _ l a n d m a r k ) / r a n g e \partial e/\partial t = (T_WS.r() - sonar\_landmark)/range ∂e/∂t=(TWS.r()−sonar_landmark)/range
-
-
5. 总结
- 发布层面(
sonar_node)负责串口/网络 I/O 与格式封装。 - 订阅层面(
Subscriber)完成 ROS 消息转换、滤波与后端注入。 - 后端层面(
Estimator)将声纳测量融入滑动窗口的非线性优化,通过SonarError将声纳对 pose 产生的约束与视觉、IMU 共同优化。
六、Ceres求解
阶段 1:定义并初始化参数块
主要内容
- 把所有待估计量(相机位姿、IMU 速度-偏置、3D 地标……)封装成 Ceres 的 ParameterBlock。
- 为每种变量选择合适的参数化:四元数形式的位姿、齐次坐标形式的地标等。
方法论
- 调用对应的 ParameterBlock 构造函数(如
PoseParameterBlock、HomogeneousPointParameterBlock)。 - 用
mapPtr_->addParameterBlock(...)将它们注册到统一的 Ceres Problem(OKVIS 封装在mapPtr_中)。
目的
- 将所有待优化的自由变量集中管理,Ceres 才能在同一次求解中联合调整它们。
对应代码段
// 1. 添加相机位姿 ParameterBlock(6DoF Pose)
auto posePB = std::make_shared<okvis::ceres::PoseParameterBlock>(T_WS, // 初始世界到载体位姿poseId, // 唯一 IDtimestamp);
mapPtr_->addParameterBlock(posePB, okvis::ceres::Map::Pose6d);// 2. 添加齐次坐标地标 ParameterBlock (4D homogeneous point)
Eigen::Vector4d lm4d(lx, ly, lz, 1.0);
auto lmPB = std::make_shared<okvis::ceres::HomogeneousPointParameterBlock>(lm4d, // [x,y,z,1]lmId); // 唯一 ID
mapPtr_->addParameterBlock(lmPB, okvis::ceres::Map::HomogeneousPoint);
阶段 2:构造残差函数(CostFunction)
主要内容
- 针对每种传感器观测(视觉重投影、IMU 预积分、Sonar 距离、Depth 深度…)实现一个残差模型:误差值和雅可比。
方法论
- 自定义或继承 Ceres 的
SizedCostFunction/AnalyticCostFunction,在Evaluate()(或operator()) 中完成残差计算和对依赖参数的导数计算。
目的
- 把测量值和当前变量估计联系起来,以残差形式告诉优化器“该如何调整参数来减小测量误差”。
对应代码段
// 视觉重投影残差
auto reprojError = std::make_shared<okvis::ceres::ReprojectionError>(cameraModel, keypoint, intrinsics, extrinsics);// IMU 预积分残差
auto imuError = std::make_shared<okvis::ceres::ImuError>(imuMeasurements, imuParams, priorState);// Sonar 距离残差
double info = 1.0;
auto sonarError = std::make_shared<okvis::ceres::SonarError>(params, range, heading, info, landmarkSubset);
阶段 3:添加到 Problem(联合注册)
主要内容
- 将所有 ParameterBlock 和 CostFunction(ResidualBlock)绑定到同一个 Ceres Problem 中(OKVIS 用
mapPtr_封装)。 - 指定每个残差块依赖哪些参数块,Ceres 内部自动构建稀疏雅可比结构。
方法论
- 调用
mapPtr_->addResidualBlock(residual, lossFunction, parameterBlockIds...),将观测残差和对应变量挂钩。
目的
- 构建完整的非线性最小二乘问题,让优化器在所有约束下同时调整所有自由变量。
对应代码段
// 视觉重投影:优化 pose 和 landmark
mapPtr_->addResidualBlock(reprojError, // 残差模型lossFunctionPtr, // 可选的 robust lossposePB->id(), // 依赖的参数块 IDlmPB->id());// IMU 预积分:连接前后两帧的 pose+bias
mapPtr_->addResidualBlock(imuError,nullptr, // 不使用 robust lossprevPosePB->id(), prevBiasPB->id(),currPosePB->id(), currBiasPB->id());// Sonar 距离:只优化当前帧位姿
mapPtr_->addResidualBlock(sonarError,nullptr,posePB->id());
阶段 4:配置 Solver 选项
主要内容
- 设定线性求解器类型(如
SPARSE_SCHUR)、信赖域策略(DOGLEG/ Levenberg–Marquardt)、最大迭代次数、并行线程数、日志输出等。
方法论
- 通过
mapPtr_->options修改ceres::Solver::Options。
目的
- 根据问题规模和实时性要求,选择最合适的求解策略以保证性能和收敛性。
对应代码段
mapPtr_->options.linear_solver_type = ceres::SPARSE_SCHUR;
mapPtr_->options.trust_region_strategy_type = ceres::DOGLEG;
mapPtr_->options.max_num_iterations = 20;
mapPtr_->options.num_threads = 4;
mapPtr_->options.minimizer_progress_to_stdout = false;
阶段 5:调用 Solve 执行优化
主要内容
- 触发底层
Problem::Solve(options, &summary),Ceres 会迭代地最小化所有残差平方和。
方法论
- OKVIS 封装了一个
Estimator::optimize(...)接口,内部调用mapPtr_->solve()。
目的
- 联合优化所有 ParameterBlock 中的变量,实现多源信息融合的非线性最小二乘解。
对应代码段
void Estimator::optimize(size_t numIter, size_t numThreads, bool verbose) {// 设置并行线程数和迭代次数mapPtr_->options.num_threads = numThreads;mapPtr_->options.max_num_iterations = numIter;mapPtr_->options.minimizer_progress_to_stdout = verbose;// 真正调用 Ceres solvermapPtr_->solve();
}
阶段 6:提取并更新结果
主要内容
- 优化完成后,从每个 ParameterBlock 中读取
.estimate(),并将结果回写到 SLAM / VIO 的状态中(位姿、速度-偏置、地图点等)。
方法论
- 对 PoseParameterBlock,调用 OKVIS 的
estimator_.get_T_WS(...); - 对地标,通过
HomogeneousPointParameterBlock->estimate()拿到最新坐标。
目的
- 将优化后的值推送到系统其他模块(里程计输出、地图维护、回环检测、可视化等),完成一次优化闭环。
对应代码段
// 1. 更新当前帧位姿
okvis::kinematics::Transformation T_WS_opt;
estimator_.get_T_WS(frameId, T_WS_opt);// 2. 更新所有地图点
for (auto &kv : landmarksMap_) {uint64_t lmId = kv.first;auto pb = std::static_pointer_cast<okvis::ceres::HomogeneousPointParameterBlock>(mapPtr_->parameterBlockPtr(lmId));kv.second.point = pb->estimate(); // 新的 [x,y,z,1]
}




![[特殊字符] 使用增量同步+MQ机制将用户数据同步到Elasticsearch](http://pic.xiahunao.cn/[特殊字符] 使用增量同步+MQ机制将用户数据同步到Elasticsearch)













)
