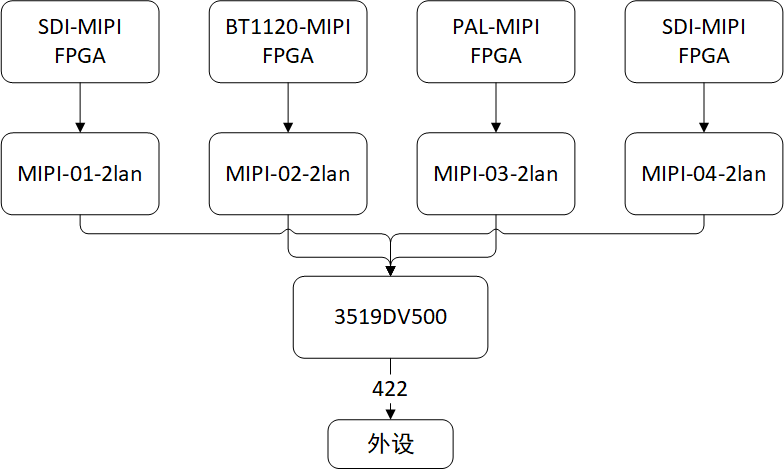
1.项目背景:
使用海思芯片,接收FPGA发送的MIPI数据,不需要ISP处理,YUV图像格式为YUV422。
2.移植MIPI驱动
修改IMX347的驱动远吗,将I2C读写的部分注释,其他的不用再做修改。
int imx347_slave_i2c_init(ot_vi_pipe vi_pipe)
{return 0;if (g_fd[vi_pipe] >= 0) {return TD_SUCCESS;}
#ifdef OT_GPIO_I2Cg_fd[vi_pipe] = open("/dev/gpioi2c_ex", O_RDONLY, S_IRUSR);if (g_fd[vi_pipe] < 0) {isp_err_trace("Open gpioi2c_ex error!\n");return TD_FAILURE;}
#elseint ret;char dev_file[I2C_DEV_FILE_NUM] = {0};td_u8 dev_num;ot_isp_sns_commbus *imx347slavebusinfo = TD_NULL;imx347slavebusinfo = imx347_slave_get_bus_info(vi_pipe);dev_num = imx347slavebusinfo->i2c_dev;if (snprintf_s(dev_file, sizeof(dev_file), sizeof(dev_file) - 1, "/dev/i2c-%u", dev_num) < 0) {isp_err_trace("snprintf_s error!\n");return TD_FAILURE;}g_fd[vi_pipe] = open(dev_file, O_RDWR, S_IRUSR | S_IWUSR);if (g_fd[vi_pipe] < 0) {isp_err_trace("Open /dev/ot_i2c_drv-%u error!\n", dev_num);return TD_FAILURE;}ret = ioctl(g_fd[vi_pipe], OT_I2C_SLAVE_FORCE, (IMX347_SLAVE_I2C_ADDR >> 1));if (ret < 0) {isp_err_trace("I2C_SLAVE_FORCE error!\n");close(g_fd[vi_pipe]);g_fd[vi_pipe] = -1;return ret;}
#endifreturn TD_SUCCESS;
}td_s32 imx347_slave_write_register(ot_vi_pipe vi_pipe, td_u32 addr, td_u32 data)
{return TD_SUCCESS; td_s32 ret;if (g_fd[vi_pipe] < 0) {return TD_SUCCESS;}#ifdef OT_GPIO_I2Ci2c_data.dev_addr = IMX347_SLAVE_I2C_ADDR;i2c_data.reg_addr = addr;i2c_data.addr_byte_num = IMX347_SLAVE_ADDR_BYTE;i2c_data.data = data;i2c_data.data_byte_num = IMX347_SLAVE_DATA_BYTE;ret = ioctl(g_fd[vi_pipe], GPIO_I2C_WRITE, &i2c_data);if (ret) {isp_err_trace("GPIO-I2C write failed!\n");return ret;}
#elsetd_u32 idx = 0;td_u8 buf[I2C_BUF_NUM];if (IMX347_SLAVE_ADDR_BYTE == 2) { /* 2 byte */buf[idx] = (addr >> 8) & 0xff; /* shift 8 */idx++;buf[idx] = addr & 0xff;idx++;} else {}if (IMX347_SLAVE_DATA_BYTE == 2) { /* 2 byte */} else {buf[idx] = data & 0xff;idx++;}ret = write(g_fd[vi_pipe], buf, IMX347_SLAVE_ADDR_BYTE + IMX347_SLAVE_DATA_BYTE);if (ret < 0) {isp_err_trace("I2C_WRITE error!\n");return TD_FAILURE;}#endifreturn TD_SUCCESS;
}3.修改VI配置信息
3.1配置MIPI输入参数
3519DV500 mipi接口输入配置参考如下:
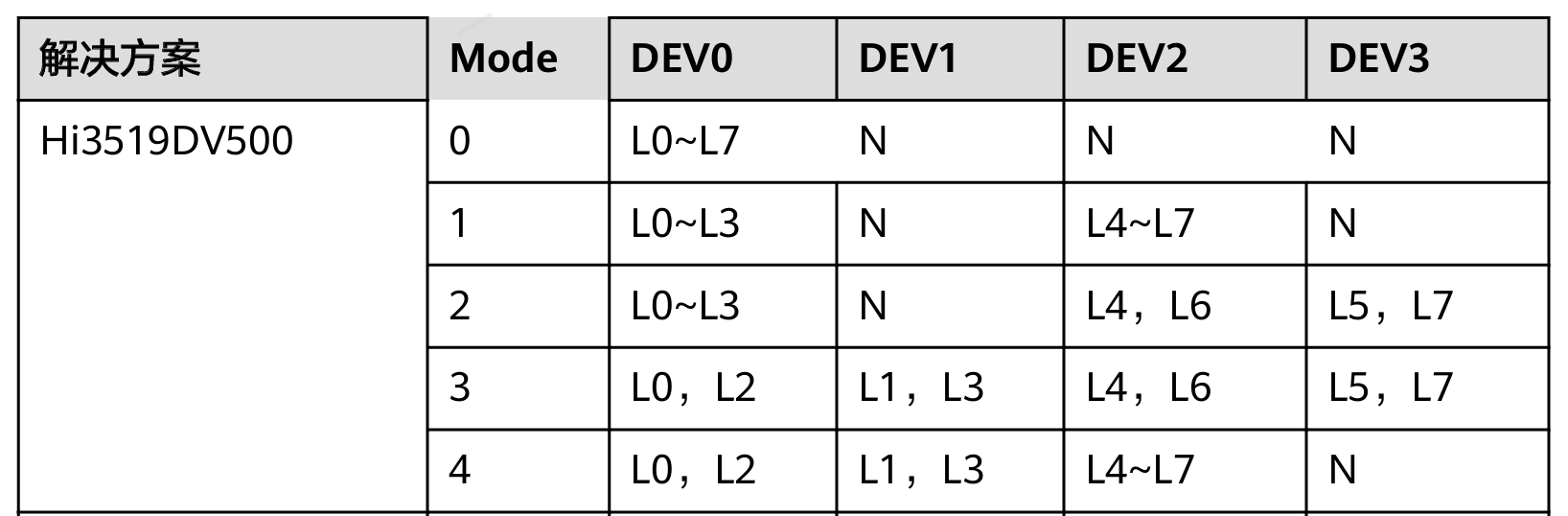
static combo_dev_attr_t g_mipi_4lane_chn0_sensor_imx347_sdi_16bit_2lan_nowdr_attr = {.devno = 0,.input_mode = INPUT_MODE_MIPI,.data_rate = MIPI_DATA_RATE_X1,.img_rect = {0, 0, 1920, 1080},.mipi_attr = {DATA_TYPE_YUV422_8BIT,OT_MIPI_WDR_MODE_NONE,{0, 1, -1, -1, -1, -1, -1, -1}}
};static combo_dev_attr_t g_mipi_4lane_chn0_sensor_imx347_pal_16bit_2lan_nowdr_attr = {.devno = 2,.input_mode = INPUT_MODE_MIPI,.data_rate = MIPI_DATA_RATE_X1,.img_rect = {0, 0, 720, 576},.mipi_attr = {DATA_TYPE_YUV422_8BIT,OT_MIPI_WDR_MODE_NONE,{4, 6, -1, -1, -1, -1, -1, -1}}
};值得注意的是,当接口模式为OT_VI_INTF_MODE_MIPI_YUV420_NORM, OT_VI_INTF_MODE_MIPI_YUV420_LEGACY,OT_VI_INTF_MODE_MIPI_YUV422 时data_reverse必须为TD_FALSE,且掩码的设置必须为component_mask[0] = 0xFF000000,component_mask[1] = 0x00FF0000,即高8bit输入Y数据,低8bit 输入C数据,否则会导致图像异常或无图像等现像。
static ot_vi_dev_attr g_mipi_yuv422_dev_attr = {.intf_mode = OT_VI_INTF_MODE_MIPI_YUV422,/* Invalid argument */.work_mode = OT_VI_WORK_MODE_MULTIPLEX_1,/* mask component */.component_mask = {0xFF000000, 0x00FF0000},.scan_mode = OT_VI_SCAN_PROGRESSIVE,/* Invalid argument */.ad_chn_id = {-1, -1, -1, -1},/* data seq */.data_seq = OT_VI_DATA_SEQ_YUYV,/* sync param */.sync_cfg = {.vsync = OT_VI_VSYNC_FIELD,.vsync_neg = OT_VI_VSYNC_NEG_HIGH,.hsync = OT_VI_HSYNC_VALID_SIG,.hsync_neg = OT_VI_HSYNC_NEG_HIGH,.vsync_valid = OT_VI_VSYNC_VALID_SIG,.vsync_valid_neg = OT_VI_VSYNC_VALID_NEG_HIGH,.timing_blank = {/* hsync_hfb hsync_act hsync_hhb */0, 0, 0,/* vsync0_vhb vsync0_act vsync0_hhb */0, 0, 0,/* vsync1_vhb vsync1_act vsync1_hhb */0, 0, 0}},/* data type */.data_type = OT_VI_DATA_TYPE_YUV,/* data reverse */.data_reverse = TD_FALSE,/* input size */.in_size = {1920, 1080},/* data rate */.data_rate = OT_DATA_RATE_X1,
};3.2 配置VI设备通道参数
td_void sample_comm_vi_get_default_pipe_info(sample_sns_type sns_type, ot_vi_bind_pipe *bind_pipe,sample_vi_pipe_info pipe_info[])
{td_u32 i;ot_size size;sample_comm_vi_get_size_by_sns_type(sns_type, &size);for (i = 0; i < bind_pipe->pipe_num; i++) {/* pipe attr */pipe_info[i].pipe_attr.pipe_bypass_mode = OT_VI_PIPE_BYPASS_NONE;pipe_info[i].pipe_attr.isp_bypass = TD_TRUE;pipe_info[i].pipe_attr.size.width = size.width;pipe_info[i].pipe_attr.size.height = size.height;pipe_info[i].pipe_attr.pixel_format = OT_PIXEL_FORMAT_YVU_SEMIPLANAR_422;pipe_info[i].pipe_attr.compress_mode = OT_COMPRESS_MODE_NONE;pipe_info[i].pipe_attr.frame_rate_ctrl.src_frame_rate = -1;pipe_info[i].pipe_attr.frame_rate_ctrl.dst_frame_rate = -1;if (sns_type == GST_412C_SLAVE_THERMO_T3_384_288_30FPS_14BIT) {pipe_info[i].pipe_attr.compress_mode = OT_COMPRESS_MODE_NONE;pipe_info[i].pipe_attr.pixel_format = OT_PIXEL_FORMAT_RGB_BAYER_14BPP;}pipe_info[i].pipe_need_start = TD_TRUE;pipe_info[i].isp_need_run = TD_TRUE;pipe_info[i].isp_quick_start = TD_FALSE;if (i == 0) {pipe_info[i].is_master_pipe = TD_TRUE;}/* pub attr */sample_comm_isp_get_pub_attr_by_sns(sns_type, &pipe_info[i].isp_info.isp_pub_attr);pipe_info[i].nr_attr.enable = TD_TRUE;pipe_info[i].nr_attr.compress_mode = OT_COMPRESS_MODE_FRAME;pipe_info[i].nr_attr.nr_type = OT_NR_TYPE_VIDEO_NORM;pipe_info[i].nr_attr.nr_motion_mode = OT_NR_MOTION_MODE_NORM;/* chn info */pipe_info[i].chn_num = 1;pipe_info[i].chn_info[0].vi_chn = 0;pipe_info[i].chn_info[0].fmu_mode = OT_FMU_MODE_OFF;pipe_info[i].chn_info[0].chn_attr.size.width = size.width;pipe_info[i].chn_info[0].chn_attr.size.height = size.height;pipe_info[i].chn_info[0].chn_attr.pixel_format = OT_PIXEL_FORMAT_YVU_SEMIPLANAR_422;pipe_info[i].chn_info[0].chn_attr.dynamic_range = OT_DYNAMIC_RANGE_SDR8;pipe_info[i].chn_info[0].chn_attr.video_format = OT_VIDEO_FORMAT_LINEAR;pipe_info[i].chn_info[0].chn_attr.compress_mode = OT_COMPRESS_MODE_NONE;pipe_info[i].chn_info[0].chn_attr.mirror_en = TD_FALSE;pipe_info[i].chn_info[0].chn_attr.flip_en = TD_FALSE;pipe_info[i].chn_info[0].chn_attr.depth = 1;pipe_info[i].chn_info[0].chn_attr.frame_rate_ctrl.src_frame_rate = -1;pipe_info[i].chn_info[0].chn_attr.frame_rate_ctrl.dst_frame_rate = -1;if (sns_type == GST_412C_SLAVE_THERMO_T3_384_288_30FPS_14BIT) {pipe_info[i].chn_info[0].chn_attr.compress_mode = OT_COMPRESS_MODE_NONE;}}
}重要参数说明:
不使用ISP图像调整: pipe_info[i].pipe_attr.isp_bypass = TD_TRUE;
VI组通道使用YUV422格式:
pipe_info[i].pipe_attr.pixel_format = OT_PIXEL_FORMAT_YVU_SEMIPLANAR_422;
pipe_info[i].chn_info[0].chn_attr.pixel_format = OT_PIXEL_FORMAT_YVU_SEMIPLANAR_422;
4.修改VPSS配置信息
td_void sample_comm_vpss_get_default_grp_attr(ot_vpss_grp_attr *grp_attr)
{grp_attr->ie_en = TD_FALSE;grp_attr->dci_en = TD_FALSE;grp_attr->buf_share_en = TD_FALSE;grp_attr->mcf_en = TD_FALSE;grp_attr->max_width = VPSS_DEFAULT_WIDTH;grp_attr->max_height = VPSS_DEFAULT_HEIGHT;grp_attr->max_dei_width = 0;grp_attr->max_dei_height = 0;grp_attr->dynamic_range = OT_DYNAMIC_RANGE_SDR8;grp_attr->pixel_format = OT_PIXEL_FORMAT_YVU_SEMIPLANAR_422;grp_attr->dei_mode = OT_VPSS_DEI_MODE_OFF;grp_attr->buf_share_chn = OT_VPSS_CHN0;grp_attr->frame_rate.src_frame_rate = -1;grp_attr->frame_rate.dst_frame_rate = -1;
}5.遇到问题
5.1图像为绿色
原因:YUV422数据位错误
解决办法:和FPGA工程师沟通一下,明确输入的MIPI数据YUV格式是,YUYV、YVYU等。
5.2 图像出现错位
原因:MIPI时钟和FPGA时钟不匹配
解决办法:检查syscfg的时钟配置。
5.2 其他错误
原因:就是硬件不行
解决办法:甩锅给硬件。






)












