导读:
随着移动机器人在工业自动化、特种作业及智能服务领域的广泛应用,其路径规划能力越来越依赖机器人操作系统ROS2的通信性能。ROS2通过去中心化架构与数据分发服务中间件显著提升了系统可靠性,但动态复杂环境中路径规划对通信延迟、带宽及稳定性的严苛要求,使中间件性能成为影响实时规划精度的关键瓶颈。近年来针对DDS、Zenoh等中间件的优化研究大量涌现,但仍缺乏对多协议多场景性能指标的跨维度系统性总结。本文综述了近年来核心研究成果,深入剖析了ROS2中间件从通用架构向场景定制化设计的转型趋势;论证了路径规划与通信服务质量的深度耦合机制;总结了嵌入式协同与边缘智能的系统级优化机制。文末提出了目前研究还存在的一些问题。
作者信息:
赵 鹏, 朱克佳:广州软件学院电子信息与控制工程学院,广东 广州
正文
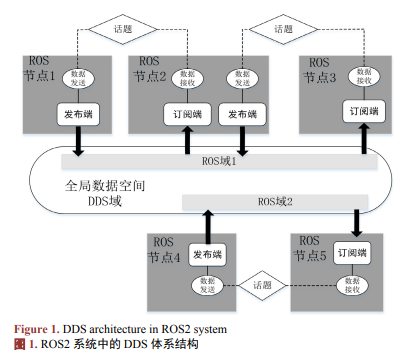
随着机器人技术在工业自动化、特种作业及智能服务领域的广泛应用,移动机器人的路径规划能力已成为其自主导航的核心支撑。机器人操作系统2 (Robot Operating System 2, ROS2)作为新一代分布式通信框架,通过数据分发服务(Data Distribution Service, DDS)中间件(ROS2系统中的DDS体系结构如图1所示)实现了去中心化通信,显著提升了系统的可靠性和扩展性。然而,在动态复杂环境中路径规划算法对通信延迟、带宽和可靠性的敏感性,使ROS2中间件性能成为制约规划效能的关键因素。
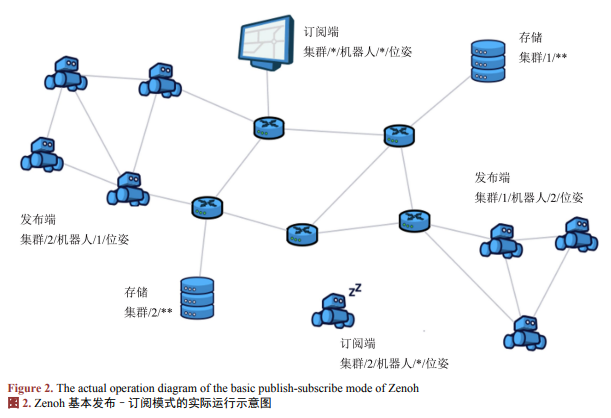
这一挑战催生了轻量化协议的革命性突破,Zenoh协议(Zero Overhead Network Protocol, Zenoh),其实际运行示意图如图2所示,Zenoh基本发布–订阅模式,旨在统一数据在传输、存储与分布式计算场景下的数据抽象,凭借5字节协议头与发布–订阅、地理分布式存储和查询融合机制,在资源受限场景下将端到端延迟显著降低,数据开销明显压缩,其性能优势在边缘计算架构中尤为凸显。
同时国内研究团队在嵌入式实时适配领域取得显著进展,高华实现了极端资源受限环境Micro XRCE-DDS (eXtreme Resource-Constrained Environment, XRCE)在实时操作系统NuttX上的部署;而董利邦通过双重创新,定制服务质量QoS (QualityofService, QoS)通道与基于以数据为中心的发布–订阅模型DCPS (Data-Centric Publish-Subscribe, DCPS)优化,提高了节点间的数据交换效率,实现了多协议数据传输,增强了数据交互的灵活性。这些突破与算法–中间件的深度协同形成呼应,李冰鑫提出的全局信息已知情况下的混沌优化自适应萤火虫路径规划算法能够有效缩短全局路径长度,减少收敛时间,对机器人路径规划的质量和效率具有显著的影响;徐永成提出了深度确定性策略梯度算法(Deep Deterministic Policy Gradient, DDPG)的改进版I-DDPG (Improved-DDPG)加快了训练流程,减少了训练过程中的不稳定因素,所得出的规划路径更短。虽然进展显著,但当前研究仍存不足与改进空间,如动态环境实时性验证仍需深化、资源受限场景适配有待强化等等。
2. ROS2中间件架构的演进与性能特征
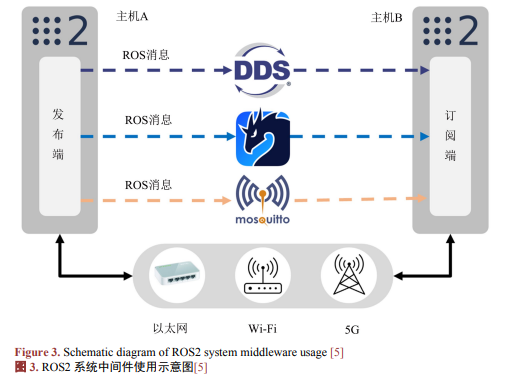
近年来研究表明,ROS2中间件架构已从通用型DDS实现转向场景定制化设计,ROS2系统中间件使用示意图如图3所示。
3. 路径规划算法与中间件的深度耦合机制
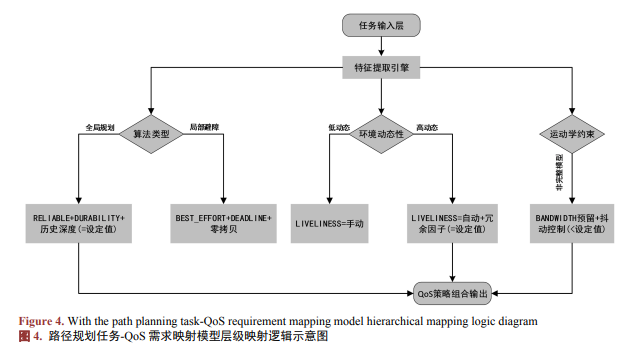
纵观近年研究,我们可以定义一个移动机器人路径规划任务-QoS需求的映射模型,如图4路径规划任务-QoS需求映射模型层级映射逻辑示意图所示,该模型通过解构路径规划任务的算法类型、环境动态性、机器人运动学约束等多维特征,建立与通信数据流QoS策略的定量映射关系。其核心在于根据任务感知的全局规划算法或局部避障算法动态适配机制、环境动态性、机器人运动学约束等因素,最终输出分层QoS策略组合,实现通信资源与算法需求的最优匹配。
4. 嵌入式协同与边缘智能的系统级优化机制
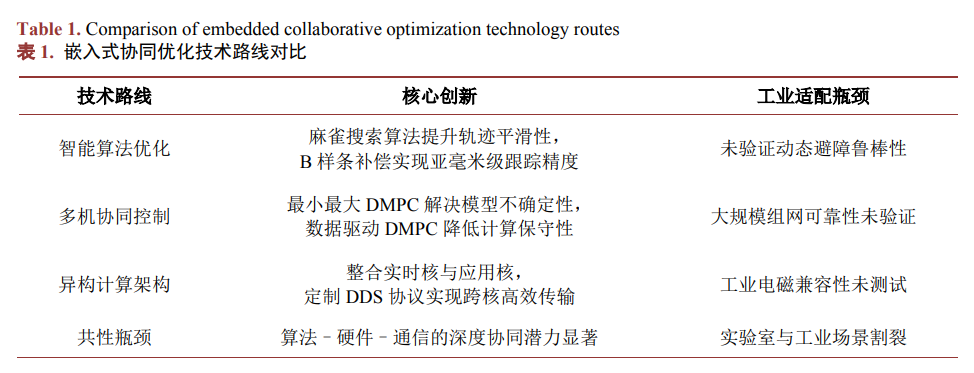
当前嵌入式协同与边缘智能优化虽在算法–硬件协同层面取得突破,却因工业场景验证缺失与跨模态仲裁机制空白而面临可靠性瓶颈。嵌入式协同优化技术路线对比如表1所示,这些系统性短板亟待通过动态QoS引擎、实时微内核架构及语义通信范式的创新实现范式跃迁,从而支撑高动态环境下“感知–决策–控制”链路的极致鲁棒性。
5. 创新方向与技术展望
综合分析,未来突破将聚焦三个维度:在动态适应性方面,环境感知的QoS引擎成为关键,需开发带宽–延迟–可靠性的自适应调节算法,结合李宏提出的延迟预测模型,实现复杂场景的鲁棒控制。嵌入式方向,高华与王文重的研究指向ROS2-RTOS微内核架构,需解决实时任务调度与内存保护的矛盾,尤其针对Cortex-M系列微控制器的资源约束优化。安全领域则需融合TEE可信执行环境与数据分发机制,建立轻量化认证协议。值得关注的是,命名数据网络NDN (Named Data Networking, NDN)与ROS2的语义融合可能重构通信范式,通过命名数据路由替代传统地址寻址,预计可以大大减少协议转换开销。这些创新将推动移动机器人在智能制造、特种环境作业等场景实现从“功能实现”到“极致可靠”的跨越。
基金项目:
广州软件学院科研项目(KY202411):基于ROS系统室内移动机器人的路径规划技术研究。
更多内容请点击原文链接:https://doi.org/10.12677/csa.2025.158197



)
![学习:JS[8]本地存储+正则表达式](http://pic.xiahunao.cn/学习:JS[8]本地存储+正则表达式)



![[学习] CORDIC算法详解:从数学原理到反正切计算实战](http://pic.xiahunao.cn/[学习] CORDIC算法详解:从数学原理到反正切计算实战)








的定义与使用)

)