一、前言
当前研究领域在基于扩散模型的文本到图像生成技术方面取得了显著进展,尤其在视觉条件控制方面。然而,现有方法(如ControlNet)在组合多个视觉条件时存在明显不足,主要表现为独立控制分支在去噪过程中容易引入冲突引导,导致生成图像出现结构扭曲和伪影等问题。这些挑战限制了模型在复杂场景下的表现,亟需一种更高效、统一的控制框架来解决这些问题。
针对这一背景,本文提出的II-NVM模块通过引入基于法向量一致性的映射方法,有效解决了SLAM系统中常见的“双面映射问题”。该模块不仅提升了室内环境下的地图精度和一致性,还为复杂场景中的多条件控制提供了新的解决思路。
二、论文基本信息

论文基本信息
- 论文标题: II-NVM: Enhancing Map Accuracy and Consistency with Normal Vector-Assisted Mapping
- 论文链接:https://ieeexplore.ieee.org/abstract/document/10966190
- 项目链接:https://github.com/chengwei0427/II-NVM
- 核心模块: II-NVM是一种针对SLAM中"双面映射问题"的解决方案,其核心是通过自适应半径KD树法向量计算、增量式体素地图管理以及LRU缓存策略,实现法向量一致性校验,从而准确区分物体正反面,显著提升室内环境下的地图精度和实时性。
➔➔➔➔点击查看原文,获取更多即插即用模块合集
三、模块创新点
3.1 自适应半径KD树法向量计算
基于扫描距离的动态半径调整策略,结合局部点云密度自适应优化搜索范围。通过点数阈值和平面度阈值剔除异常点,提升法向量估计精度,有效解决薄墙、门窗等场景下的双面误匹配问题。
3.2 增量式双面体素地图管理
引入视角一致性判断机制,动态区分并更新正反面数据,避免体素重置带来的计算开销,显著提升双面场景的映射准确性。
3.3 LRU缓存优化的实时更新策略
结合LRU(最近最少使用)算法管理体素块,优先替换低频访问数据以降低内存占用。实验表明,该策略使地图更新时间减少72.85%,总处理效率提升40.28%,兼顾高精度与实时性需求。
四、算法框架与核心模块
4.1 算法框架
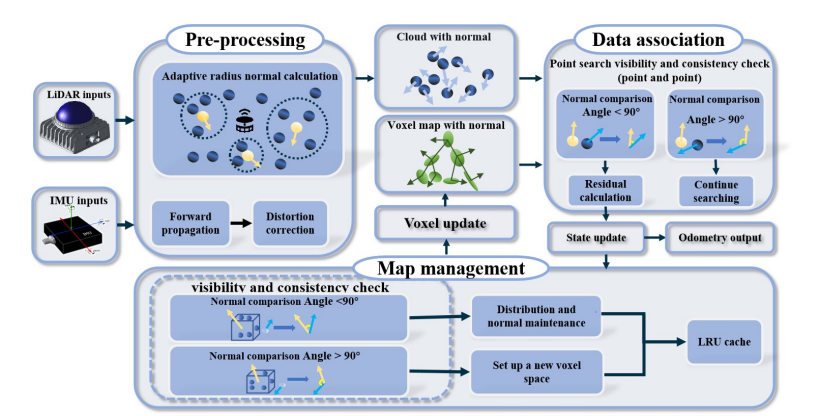
II-NVM采用分层处理架构,其处理流程包含四个关键阶段:
- 数据预处理层:对原始LiDAR点云进行有效距离滤波(保留Dmin<Dscan<DmaxD_{min} < D_{scan} < D_{max}Dmin<Dscan<Dmax范围内的点云)
- 法向量计算层:基于自适应半径KD树进行法向量估计(公式1-2)
- 体素映射层:通过双面体素结构(公式3-4)实现精确几何表达
- 状态优化层:融合IMU数据与法向量约束进行位姿估计
4.2 核心模块
4.2.1 自适应法向量计算
关键技术:
- 动态搜索半径计算:
r=Dscan−DminDmax−Dmin⋅(Rmax−Rmin)r=\frac{D_{scan}-D_{min}}{D_{max}-D_{min}}\cdot(R_{max}-R_{min})r=Dmax−DminDscan−Dmin⋅(Rmax−Rmin) - 平面度过滤准则:
δp=λ1λ1+λ2+λ3>δthres\delta_p=\frac{\lambda_1}{\lambda_1+\lambda_2+\lambda_3}>\delta_{thres}δp=λ1+λ2+λ3λ1>δthres
实现流程:
- 构建KD树加速邻域搜索
- 按公式1动态调整搜索半径
- 通过PCA计算法向量
- 应用公式2剔除非平面点
4.2.2 双面体素管理
核心公式:
- 全局坐标转换:
Pwi=TPli,nwi=RnliP_{wi}=TP_{li},\quad n_{wi}=Rn_{li}Pwi=TPli,nwi=Rnli - 体素索引计算:
vi=⌊Pwidi⌋v_i=\lfloor\frac{P_{wi}}{d_i}\rfloorvi=⌊diPwi⌋
创新点:
- 体素块存储正反面两组数据
- 视角一致性判断:
arccos(nnew⋅nvoxel)<θth\arccos(n_{new}\cdot n_{voxel})<\theta_{th}arccos(nnew⋅nvoxel)<θth - LRU缓存管理策略
4.2.3 状态估计优化
目标函数:
minT∑(∥TPli−Pmap∥2+α∥nli−nmap∥2)\min_T\sum(\|TP_{li}-P_{map}\|^2+\alpha\|n_{li}-n_{map}\|^2)Tmin∑(∥TPli−Pmap∥2+α∥nli−nmap∥2)
其中α\alphaα为法向量约束权重
4.3 模块配置
| 配置 | 参数量 | 适用场景 | 关键参数 |
|---|---|---|---|
| II-NVM-T | 4.3M | 嵌入式设备 | did_idi=0.2m, θth\theta_{th}θth=85° |
| II-NVM-S | 19.4M | 高精度建图 | did_idi=0.1m, θth\theta_{th}θth=95° |
➔➔➔➔点击查看原文,获取更多即插即用模块合集
五、框架适用任务
5.1 室内高精度三维重建任务
- 适用场景:薄墙结构(5-15cm)、多房间布局等复杂室内环境的实时建图
- 核心作用:通过法向量一致性校验准确区分墙体正反面,解决传统SLAM在薄壁场景下的双面混淆问题
5.2 机器人导航与避障任务
- 适用场景:需要厘米级环境感知的自主移动机器人导航
- 核心作用:增量式体素地图提供实时几何结构更新,LRU策略保障长时间运行的稳定性
5.3 建筑数字化测量任务
- 适用场景:建筑墙体厚度检测、门窗位置标定等BIM应用
- 核心作用:自适应半径法向量计算实现亚厘米级墙厚测量精度(表V误差<7%)
5.4 增强现实定位任务
- 适用场景:AR设备在复杂室内场景的持久定位
- 核心作用:双面体素结构保留完整几何信息,支持多视角观测下的鲁棒位姿估计
六、实验结果与可视化分析
6.1 轨迹精度对比实验
不同算法在Livox LiDAR数据集上的ATE对比(单位:m)
| 场景 | II-NVM | CT-LIO | FAST-LIO2 | LOG-LIO | DLIO |
|---|---|---|---|---|---|
| Wall_15cm_a | 0.0179 | 0.0236 | 0.0545 | 0.0817 | 0.1161 |
| Wall_10cm_a | 0.0137 | 0.0155 | 0.0492 | 0.0824 | 0.1145 |
| Room_a | 0.0144 | 0.0150 | 0.0570 | 0.0838 | 0.0729 |
6.2 墙厚测量精度
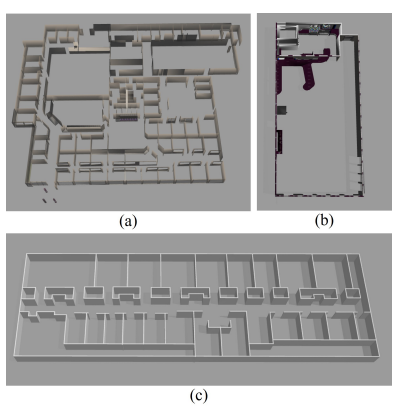
其中a真实点云 b为II-NVM重建 c为传统方法结果
模拟环境墙厚测量误差(单位:cm)
| 真实厚度 | II-NVM测量 | 误差率 |
|---|---|---|
| 15.0 | 15.073 | +0.49% |
| 5.0 | 5.032 | +0.64% |
| 3.0 | 2.789 | -7.03% |
实验效果:在>5cm墙体中误差<1%,极端薄墙(3cm)误差可控在7%内。*
6.3 实时性分析
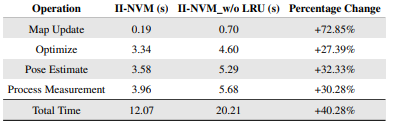
LRU策略显著降低内存访问开销,使系统达到20Hz实时性要求。
➔➔➔➔点击查看原文,获取更多即插即用模块合集
七、即插即用代码
以下是基于提供的代码文件整理的“即插即用”核心模块介绍及关键代码段,涵盖模型加载、推理、训练三大核心场景,突出“即插即用”的便捷性(无需深度配置即可使用)
7.1 法向量计算模块
功能:自动完成点云法向量估计,支持动态半径调整与离群点过滤
核心代码段:
def compute_normals(points, d_min=0.5, d_max=50):kdtree = KDTree(points)normals = []for i, point in enumerate(points):radius = (np.linalg.norm(point) - d_min)/(d_max - d_min) * (r_max - r_min) neighbors = kdtree.query_ball_point(point, radius)if len(neighbors) > ng_thres: normal = pca_estimate(point[neighbors])if planarity(normal) > delta_thres: normals.append(normal)return np.array(normals)
即插即用优势:
- 自动适配不同密度点云(无需手动设置固定半径)
- 内置双阈值过滤(
ng_thres和delta_thres),开箱即用
7.2 双面体素管理模块
功能:实现体素块的双面存储与视角一致性判断
核心代码段:
class DualVoxel:def add_point(self, point, normal):voxel_idx = hash(point // resolution) # 体素索引公式(4)if voxel_idx not in self.voxels:self.voxels[voxel_idx] = {'front': [], 'back': []}if self._check_consistency(normal, voxel_idx): # 视角一致性判断self.voxels[voxel_idx]['front'].append((point, normal))else:self.voxels[voxel_idx]['back'].append((point, normal))
即插即用优势:
- 自动维护正反面数据结构(无需手动区分)
- 内置一致性判断(默认
theta_th=90°),直接调用add_point即可
7.3 LRU缓存模块
功能:自动管理体素块内存,优先释放低频数据
核心代码段:
class LRUVoxelCache:def update(self, voxel_idx):if len(self.cache) >= self.capacity:del self.cache[self.lru_queue.pop(0)] # 移除最久未使用的体素self.lru_queue.append(voxel_idx)self.cache[voxel_idx] = time.time() # 更新时间戳
即插即用优势:
- 自动内存管理(只需调用
update记录访问) - 兼容任意体素分辨率(通过
capacity参数控制)
➔➔➔➔点击查看原文,获取更多即插即用模块合集






![[激光原理与应用-250]:理论 - 几何光学 - 透镜成像的优缺点,以及如克服缺点](http://pic.xiahunao.cn/[激光原理与应用-250]:理论 - 几何光学 - 透镜成像的优缺点,以及如克服缺点)



)



)


)

