我们在GNSS抗干扰天线的选型、测试方法以及为什么不能做RTK?(抗干扰内容全集)中提到的抗干扰天线,针对的是GPS压制式干扰。对于GPS欺骗式干扰,抗干扰天线是无能为力的。
简单来说,压制式干扰是通过发射强功率的噪声信号,把真实的GPS信号淹没,最终使得GPS接收机不能正常定位。
欺骗式干扰恰恰相反,欺骗式干扰的发射功率一般都比较低,实际工程要求:欺骗信号功率需比真实信号高 3-10 dB。
欺骗式干扰是生成一种虚假的信号。这种虚假的信号从信号格式、相位关系上看起来和真实的GPS信号完全相同。GPS接收机接收到这种虚假信号之后,会被诱骗并锁定到虚假信号上,从而导致GPS接收机计算出一个错误的位置、速度和时间。
而这个错误的位置、速度和时间正是攻击者期望的。
欺骗式干扰的三阶段工作流程
欺骗式干扰一般包括三个核心技术步骤:
-
信号同步与锁定:
伪造欺骗性GPS信号的第一步是完整捕捉真实GPS信号并提取其信息:
-
• 干扰发生器自带GPS接收机,能够接收空中GPS信号;
-
• 捕捉并复制信号中的:
-
• 卫星PRN码(伪随机码)
-
• 载波频率
-
• 导航电文内容(星历、时间、轨道参数)
-
开始阶段,干扰器生成的信号功率非常低,避免引起接收机注意。
2. 功率压制与无缝接管:
干扰器逐步提升生成信号的功率:
-
• 通常要求比真实GPS信号高出 3~10 dB;
-
• 根据经验:
-
• 初始阶段:比真实信号高0~1 dB
-
• 接管阶段:提升至真实信号+6 dB
-
• 稳定阶段:维持+3 dB
-
• 上限不超过接收机AGC(自动增益控制器)的阈值(通常为+15 dB)
-
由于GPS接收机默认“锁定最强信号”。由于欺骗信号与真实信号结构一致、码相位同步,接收机会自动切换至欺骗信号,而不会失锁也不会发出告警。
这个过程是无缝的、隐蔽的。
3. 诱导“漂移”,欺骗数据注入 :
一旦GPS接收机锁定在欺骗信号上,干扰发射器就可以逐渐“牵引”其解算结果:
-
• 微调码相位 ⇒ 伪造伪距 ⇒ 改变位置
-
• 修改电文中的星历信息 ⇒ 让接收机“相信”卫星在别处
-
• 操控多普勒频率 ⇒ 欺骗速度和方向
这个“诱导”的过程非常缓慢和平滑,以避免触发GPS接收机内部的合理性检查算法:
-
• 接收机的速度/加速度异常检测算法
-
• RAIM(接收机自主完好性监控)机制
-
• 电文一致性校验逻辑
从而让无人机在毫不知情的情况下,按照干扰发生器设定的轨迹飞行。
举个现实场景的例子:
无人机在高空飞行,地面干扰器逐渐“牵引”它的导航数据,让它“以为”自己偏离了航向,从而引导其进入指定区域降落或偏离航线 —— 无人机毫无觉察,甚至仍在上报“正常运行”。
为什么简单的“射频转发式干扰”无效
很多人误以为,使用射频转发器就能实现GPS欺骗。
射频转发器的基本原理是:室外天线接收微弱的GPS卫星信号,通过线缆传输至室内的主机进行放大和滤波,再通过室内天线将增强后的信号发射出去。用于室内的GPS接收机定位。
如果把射频转发器搬到室外,GPS接收机既能接收真实GPS信号,又能接收转发器的信号,那么GPS接收机会被转发器的信号欺骗吗?
答案是:正常的GPS接收机不会被转发器发射的信号欺骗。
原因很简单,因为GPS射频转发器的功能是“接收-放大-滤波-发射”,整个过程(从室外接收天线到室内发射天线)存在一个固定的系统延迟T。
GPS信号经过转发器之后,传播延时比直达信号增加了这个固定延迟T。假设转发器的延时是100ns,相当于经过转发器的每一路卫星信号,在接收机看来,伪距都被认为增加了30m。
我们在GNSS接收机的定位合集:定位原理,误差来源,定位精度分析中介绍过GPS接收机定位原理,GPS接收机会用被“集体拉长30m”的伪距去解算方程组,

定位方程
由于存在固定延迟T,所有伪造卫星信号的伪距都被同等增大了约30米。这种‘**共性误差’**在定位解算中,在定位解算的时候,接收机会将这种“整体漂移”归为自身时钟偏差,导致定位结果出现一个巨大的、不连续的位置跳变或者时间跳变。
具备RAIM(接收机自主完好性监测)功能的GPS接收机很容易检测到这种所有卫星同时出现的异常,从而触发告警并丢弃定位结果。
因此,这种简单的转发式干扰,对大多数现代接收机是无效的。
成功欺骗GPS接收机所需的信号特征
要让GPS接收机信以为真,虚假的欺骗信号具备具备一下的关键特征:
-
• 功率略高于真实GPS信号
欺骗信号在GPS接收机天线处的功率必须显大于真实GPS信号,但也不过分地高于真实的GPS信号,否则会被GPS接收机的AGC功能检测出来;
-
• 信号结构一致
欺骗信号的结构必须与真实的GPS信号的结构完全一致。这里主要包括
- 伪随机码一致
- 导航电文的调制格式,数据帧结构,电文所在的位置一致;
- 载波频率一致
-
• 欺骗信号的码相位和真实信号的码相位偏差非常小
这是成功“接管”GPS接收机跟踪环路的关键。欺骗信号的码相位和真实信号的码相位的初始偏差必须非常小,否则会导致GPS接收机失锁或者没法接管GPS接收机。工程上要求:
| 偏差量级 | 接收机响应 |
| >0.3码片 | 相关器无法锁定 |
| 0.1-0.3码片 | 可能引起失锁告警 |
| <0.1码片 | 可无缝接管 |
-
• 时空一致性
干扰发生器伪造的多个(比如6个,8个)GPS卫星信号必须指向同一个(错误的)时空点,否则会被识别为矛盾数据而被剔除。
此外,虚拟信号的多普勒频移也必须符合这个虚假运动状态的物理规律,否则触发异常速度检测。
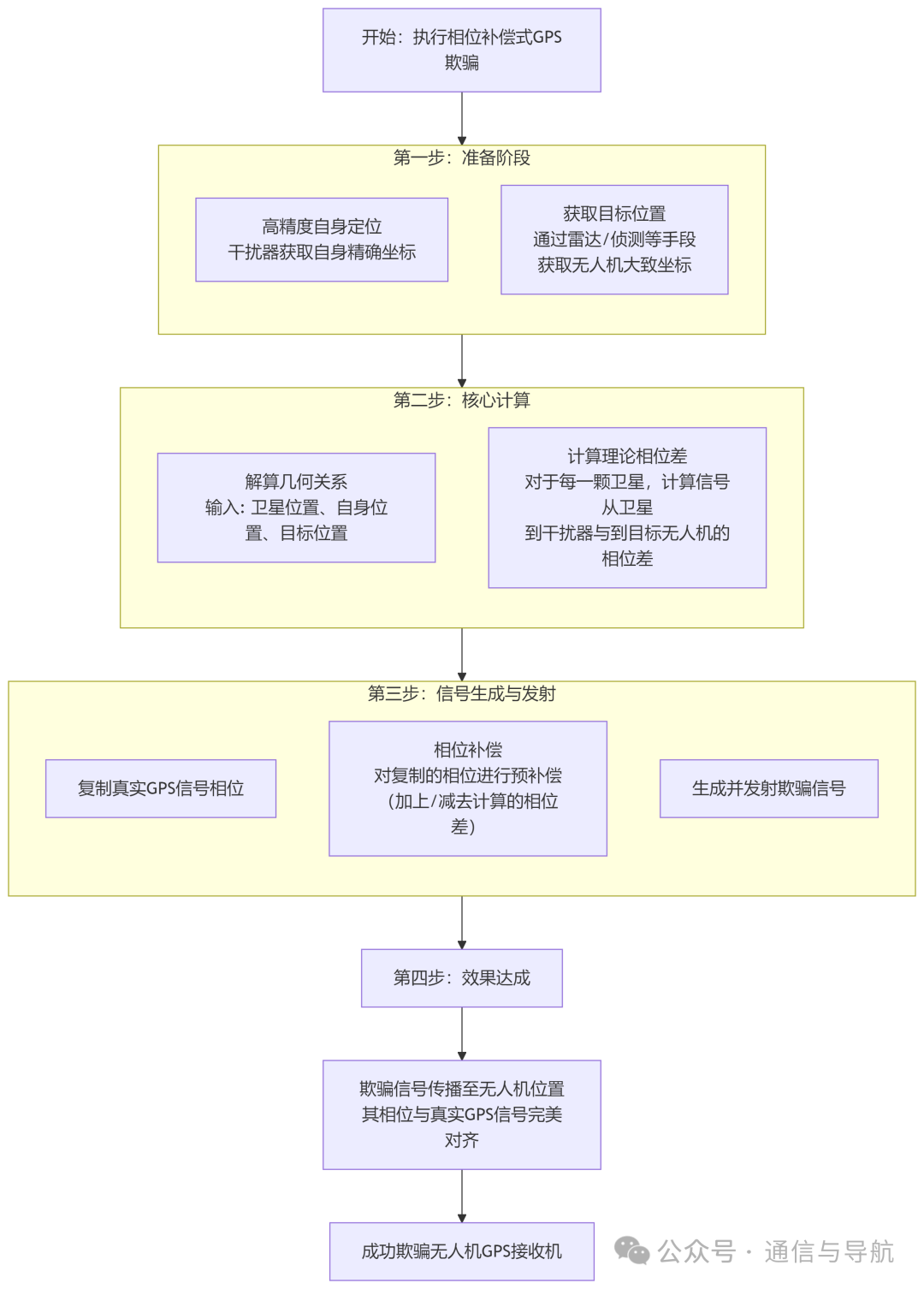
空间距离影响下的欺骗策略
如果干扰发生器与目标设备(如无人机)有一定距离,必须考虑空间传播路径对信号的影响,干扰发生器必须主动计算并补偿两者之间的空间相位差。
实现方式:
1. 高精度自身定位:干扰发生器必须首先通过某首先获得自己的高精度位置坐标。
2. 获取目标位置:通过雷达、无线电测向或其他侦测手段,实时获取目标无人机的高精度位置。这个是欺骗式干扰的难点和关键点,获取的目标位置精度越差,后续相位补偿的误差就越大,欺骗成功的概率就越低。
3. 解算几何关系:利用已知的卫星位置(从导航电文中获得)、自身的精确位置和无人机的大致位置,实时计算出对于每一颗卫星,信号在干扰发生器位置和无人机位置之间的理论相位差。
4. 相位补偿 :在生成欺骗信号时,干扰发生器不再是简单复制它接收到的相位,而是在复制的相位基础上,主动地加上或减去一个经过计算的相位补偿值。
5. 精确同步:经过这样“相位补偿”之后的欺骗信号,在经过一段距离的传播、到达无人机位置时,其携带的相位恰好就能与那一瞬间到达无人机的真实GPS信号相位完美对齐。
6. 从而达到了欺骗无人机上GPS接收机的目的。
信号的工作流程如下:
总结
GPS欺骗的核心在于:
1. 不摧毁接收机,而是“诱导”它接收错误的信息;
2. 欺骗信号在形式上与真信号几乎不可分辨;
3. 接收机不会失锁、不会报警、继续输出“正常但错误”的数据;
4. 攻击者可以远程操控设备行为,甚至实施“软劫持”;
5. 检测困难、防御门槛高,普通抗干扰天线无效
码字不易,大家觉得文章不错,就安排一下一键三连吧:点赞、分享、推荐。
推荐阅读:
GNSS抗干扰天线的选型、测试方法以及为什么不能做RTK?(抗干扰内容全集)
GNSS接收机的定位合集:定位原理,误差来源,定位精度分析
![[PV]AXI R/W/RW带宽计算的tcl脚本](http://pic.xiahunao.cn/[PV]AXI R/W/RW带宽计算的tcl脚本)

)











技术的发展历史)




