产品概述
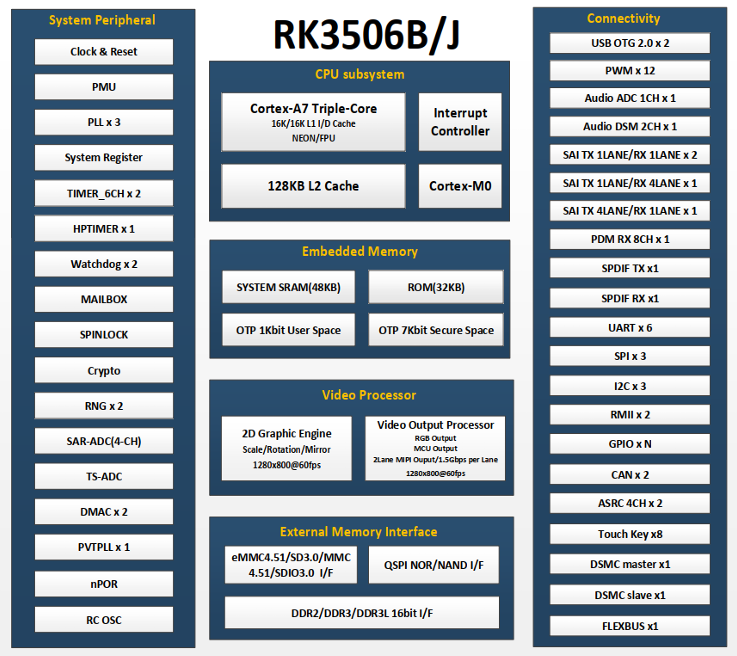
触觉智能RK3506星闪开发板,型号IDO-EVB3506-V1采用 Rockchip RK3506(三核 Cortex-A7+单核Cortex-M0, 主频最高1.5GHz)设计的评估开发板,专为家电显控、显示HMI、手持终端、工业IOT网关、工业控制、PLC等领域而设计。内置2D硬件引擎和显示输出引擎,以最小化CPU负载,满足图像显示需求。 RK3506 SoC 内部组成,如下图所示:
1.1 产品特点
- 搭载瑞芯微SOC RK3506(三核 Cortex-A7+单核Cortex-M0, 主频最高1.5GHz);
- 单路MIPI-DSI(2Lane),支持到1280x1280@60fp ;
- 两路独立的百兆以太网口;
- 支持星闪无线通信通讯模组;
- Linux全新Kernel6.1内核SDK加持,全面支持Ubuntu、Debian以及Buildroot;
1.2 产品外观及尺寸
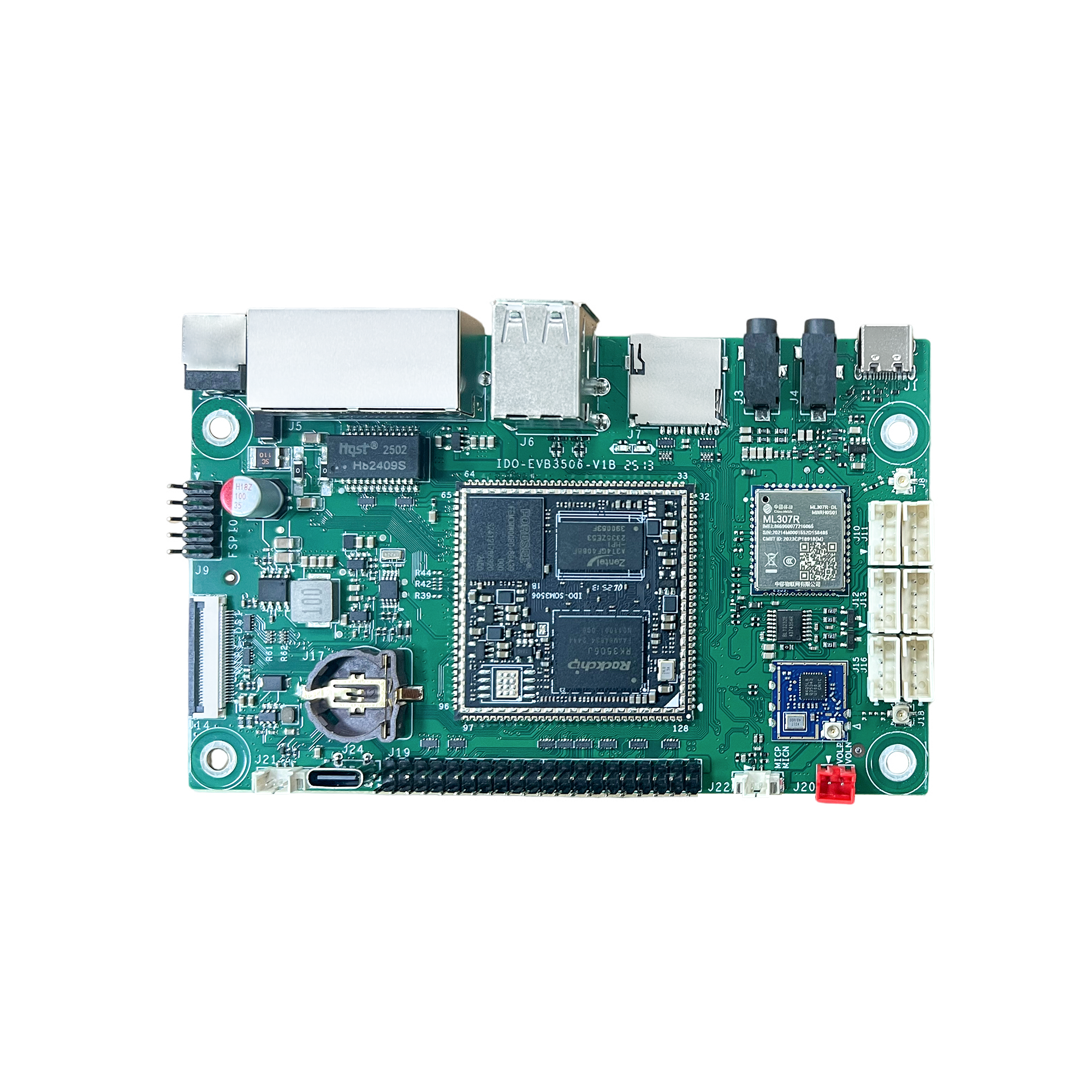
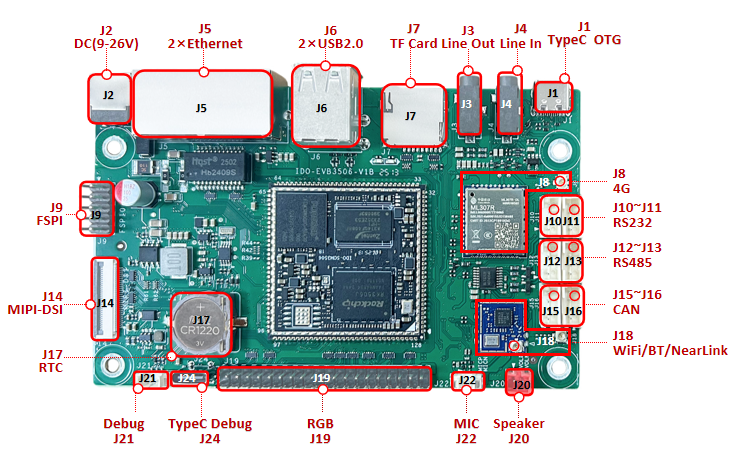
IDO-EVB3506-V1(FLASH版本)正面图,如下图所示:
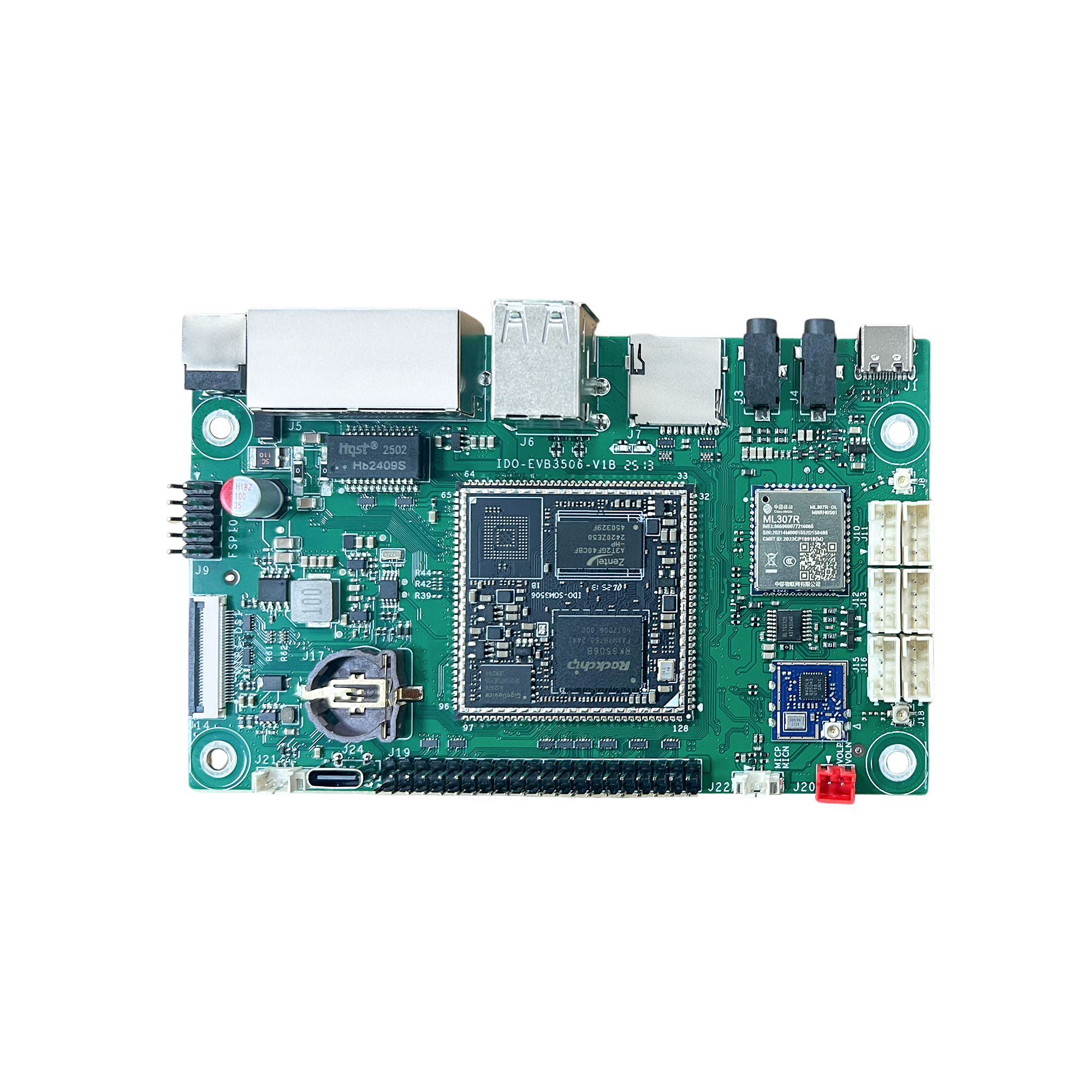
IDO-EVB3506-V1(eMMC版本)正面图,如下图所示:
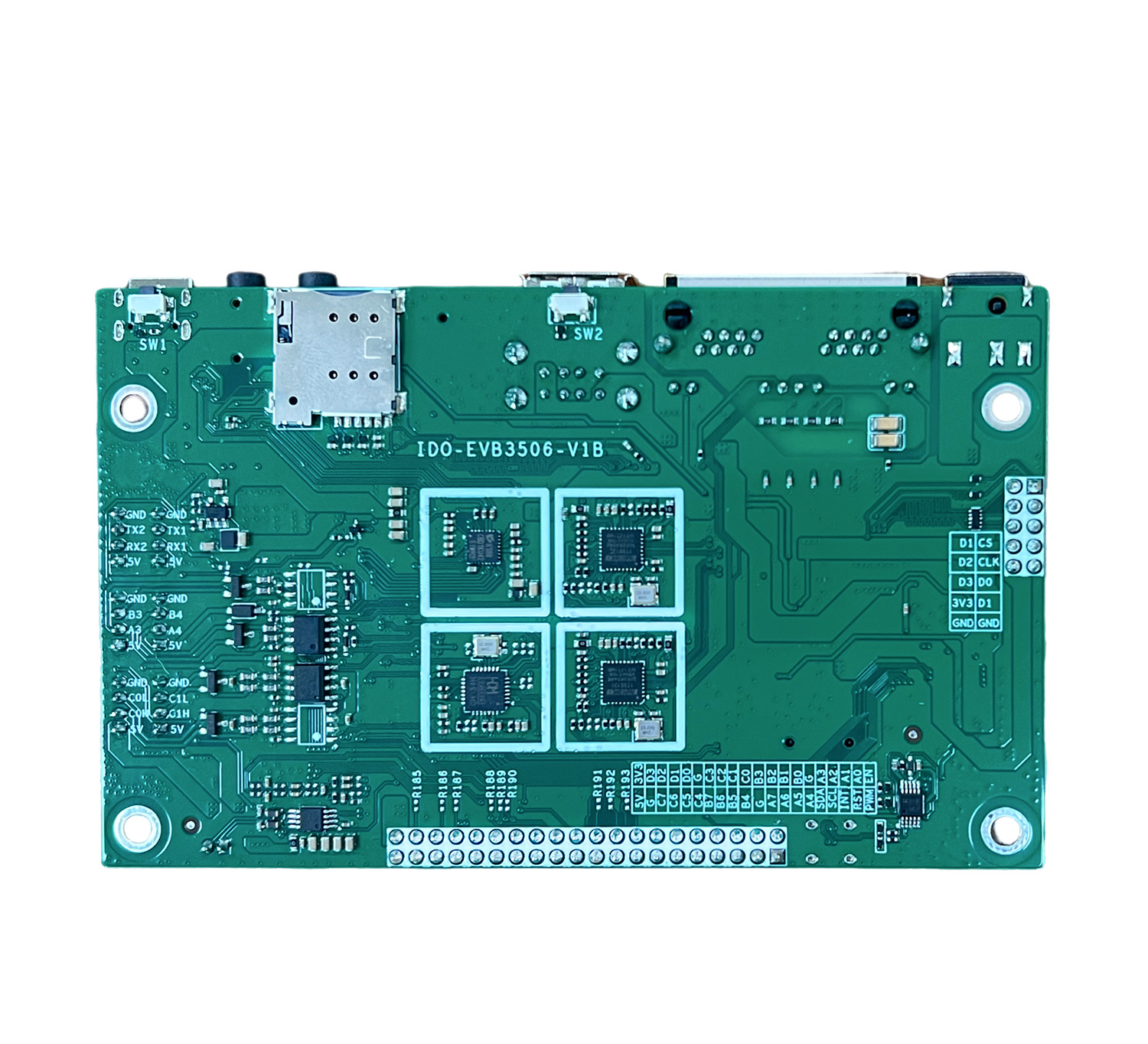
IDO-EVB3506-V1背面图,如下图所示:
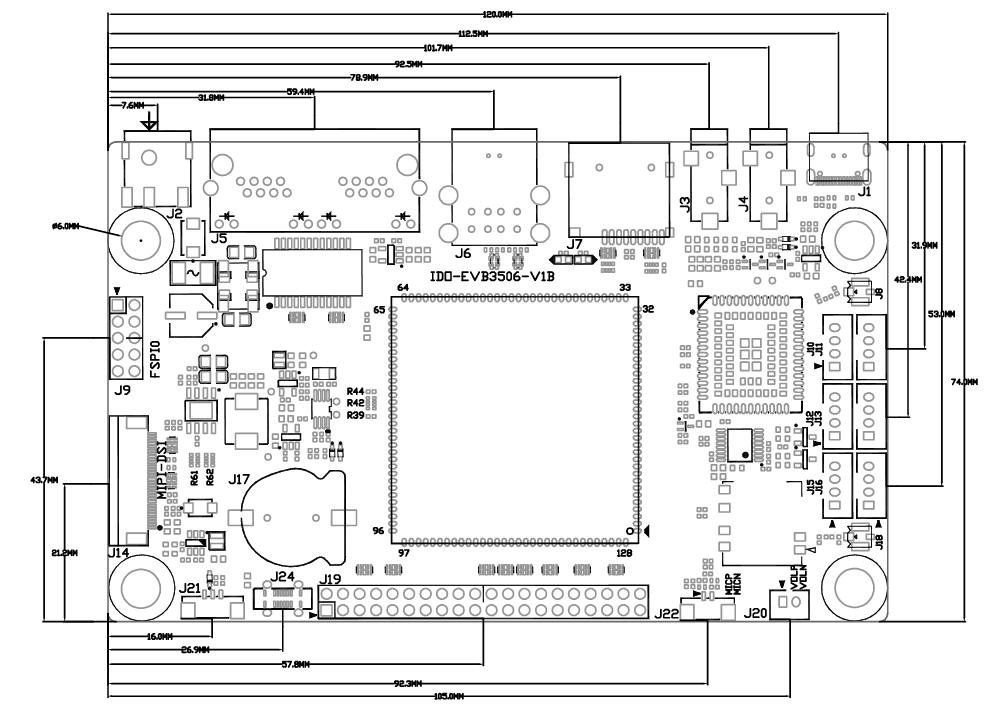
IDO-EVB3506-V1正面尺寸图,如下图所示:
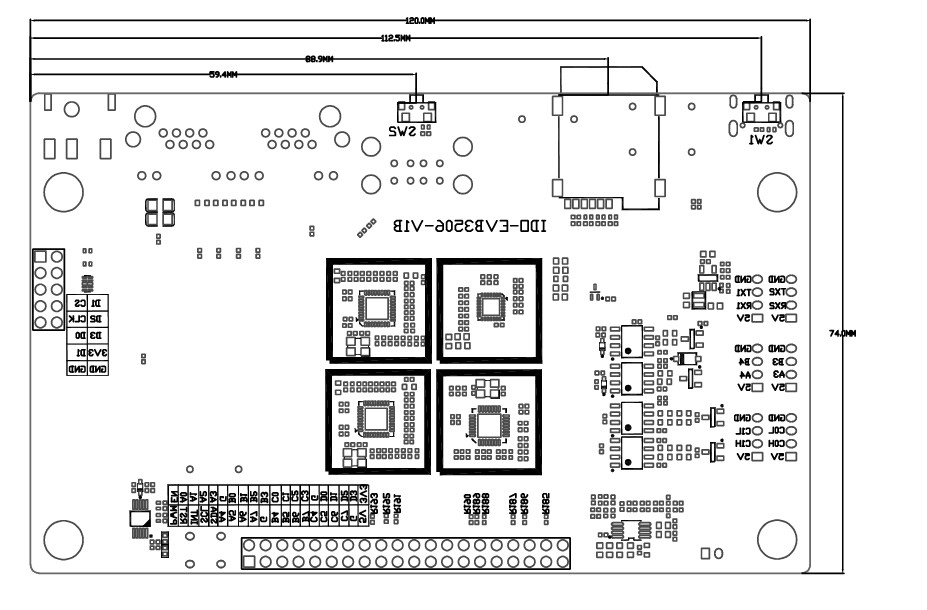
IDO-EVB3506-V1背面尺寸图,如下图所示:
2 技术参数
2.1 硬件参数
硬件参数,如下表所示:
| 基本参数 | |
| SOC | RockChip RK3506B/RK3506J |
| CPU | 三核 Cortex-A7+单核Cortex-M0, 主频最高1.5GHz |
| GPU | 2D Graphic Engine |
| 内存 | 256MB/512MB/1GB DDR3/DDR3L 16bit |
| 存储 |
以上配置二选一 1 × TF-Card Slot(eMMC版本不可用) |
| 硬件参数 | |
| 以太网 | 支持双百兆以太网(100 Mbps) |
| 无线网络 | 支持4G LTE Cat1移动通信 支持2.4GHz WLAN+BLE+SLE |
| 显示接口 | 视频输出: 1 x RGB (1280×1280@60fps); 1 x MIPI_DSI_TX(2Lane Ouput/1.5Gbps per Lane,1280×1280@60fps); |
| 音频接口 | 1 × SPEAKER,单声道喇叭输出 1 × LINEIN 1 × LINEOUT 1 × MIC |
| USB | 1 × USB2.0 OTG 2 × USB2.0 HOST |
| 扩展接口 | 1 × Debug UART TTL 1 × RS232(最大支持2路) 1 × RS485(最大支持2路) 1 × CAN(最大支持2路) 1 × I2C 1 × FSPI(NAND FLASH版本不可用) 34 × GPIO(最大) |
| 其他 | |
| 主板尺寸 | 120mm × 73.9mm |
2.2 工作环境
工作环境,如下表所示:
| 工作环境 | |
| 工作温度 | -20~+80℃ |
| 工作湿度 | 0~90% RH 非冷凝 |
| 存储温度 | -40~+85℃ |
2.3 系统支持
系统支持,如下表所示:
| 序号 | 操作系统 | 支持 | 说明 |
| 1 | Buildroot | | / |
| 2 | Ubuntu | | / |
3 接口定义
IDO-EVB3506-V1正面接口位号图,如下图所示:
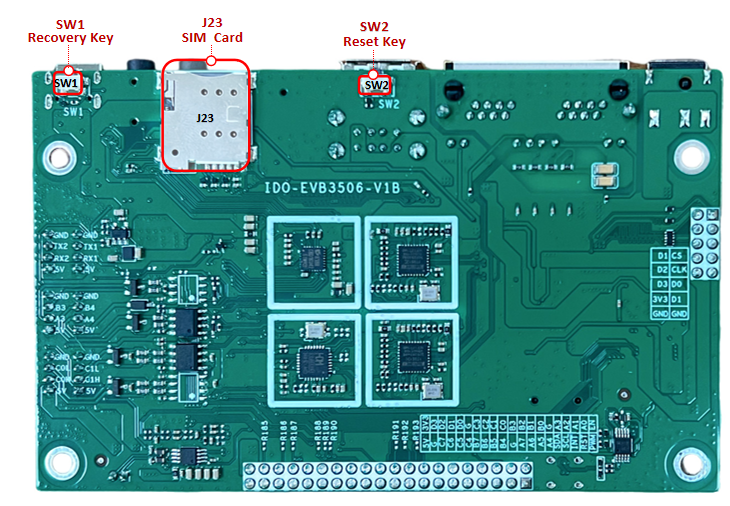
IDO-EVB3506-V1背面接口位号图,如下图所示:
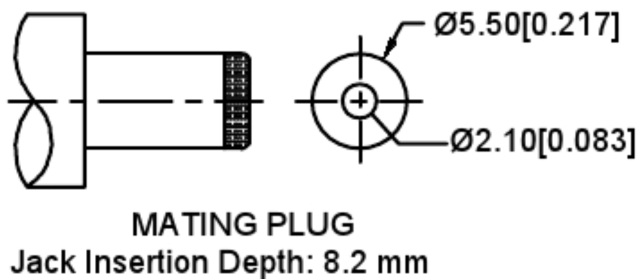
3.1 电源接口
主板额定电压: 12V。
电流要求:不小于1A 。
注意:主板可适应的供电电压范围:DC9V-26V。
通过 J2 DC-042座 (内径2mm,外径6mm) 连接电源适配器,电源插头参考图片,如下图所示:
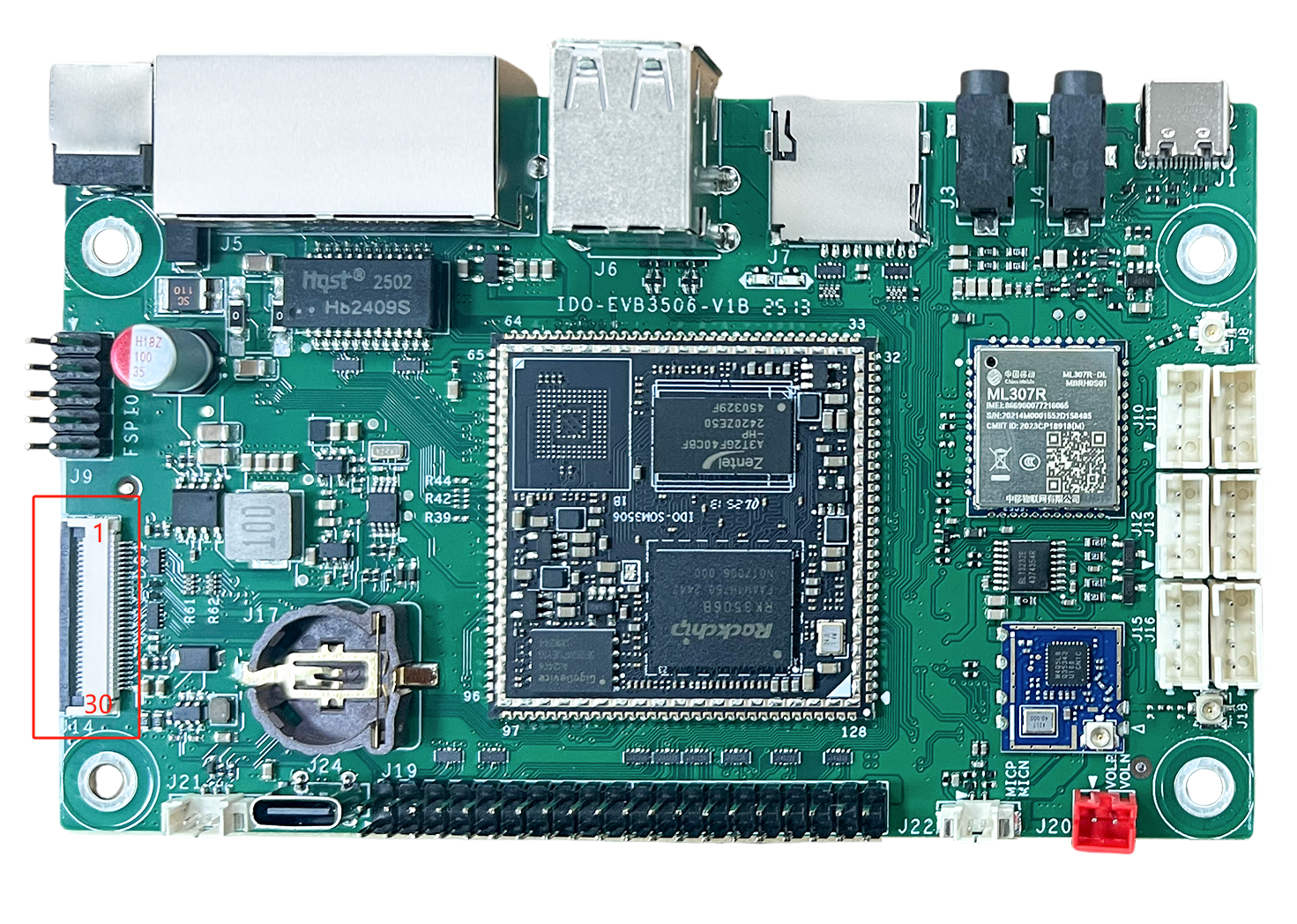
3.2 MIPI-DSI接口
开发板支持1路MIPI-DSI,2-Lane,支持1280x1280@60fp;
(J14) 30Pin FPC 0.5mm 下接,如下图所示:
|
| |||
| 序号 | 定义 | 电平/V | 说明 |
| 1 | VCC_LEDK_TX | / | MIPI-DSI背光源负极 |
| 2 | VCC_LEDK_TX | / | |
| 3 | VCC_LEDA_TX | 30V | MIPI-DSI背光源正极 |
| 4 | GND | GND | 电源地 |
| 5 | MIPI_RST_L | / | MIPI_DSI 复位信号 |
| 6 | GND | / | 电源地 |
| 7 | VCC3V3 | GND | VCC_3.3V供电 |
| 8 | GND | / | MIPI_DSI_TX_D1信号对 |
| 9 | VCC3V3 | / | VCC_3.3V供电 |
| 10 | GND | GND | 电源地 |
| 11 | MIPI_DSI_D0P | / | MIPI_DSI_D0信号对 |
| 12 | MIPI_DSI_D0N | / | |
| 13 | GND | GND | 电源地 |
| 14 | MIPI_DSI_D1P | / | MIPI_DSI_D1信号对 |
| 15 | MIPI_DSI_D1N | / | |
| 16 | GND | GND | 电源地 |
| 17 | MIPI_DSI_CLKP | / | MIPI_DSI_TX_D3信号对 |
| 18 | MIPI_DSI_CLKN | / | |
| 19 | GND | GND | 电源地 |
| 20 | GND | GND | 电源地 |
| 21 | GND | GND | 电源地 |
| 22 | GND | GND | 电源地 |
| 23 | GND | GND | 电源地 |
| 24 | GND | GND | 电源地 |
| 25 | TP_INT | 3.3V | TP中断信号 |
| 26 | TP_SDA | 3.3V | I2C总线信号 |
| 27 | TP_SCL | 3.3V | |
| 28 | TP_RST | 3.3V | TP复位信号 |
| 29 | VCC3V3 | 3.3V | 3.3V电源 |
| 30 | GND | GND | 电源地 |
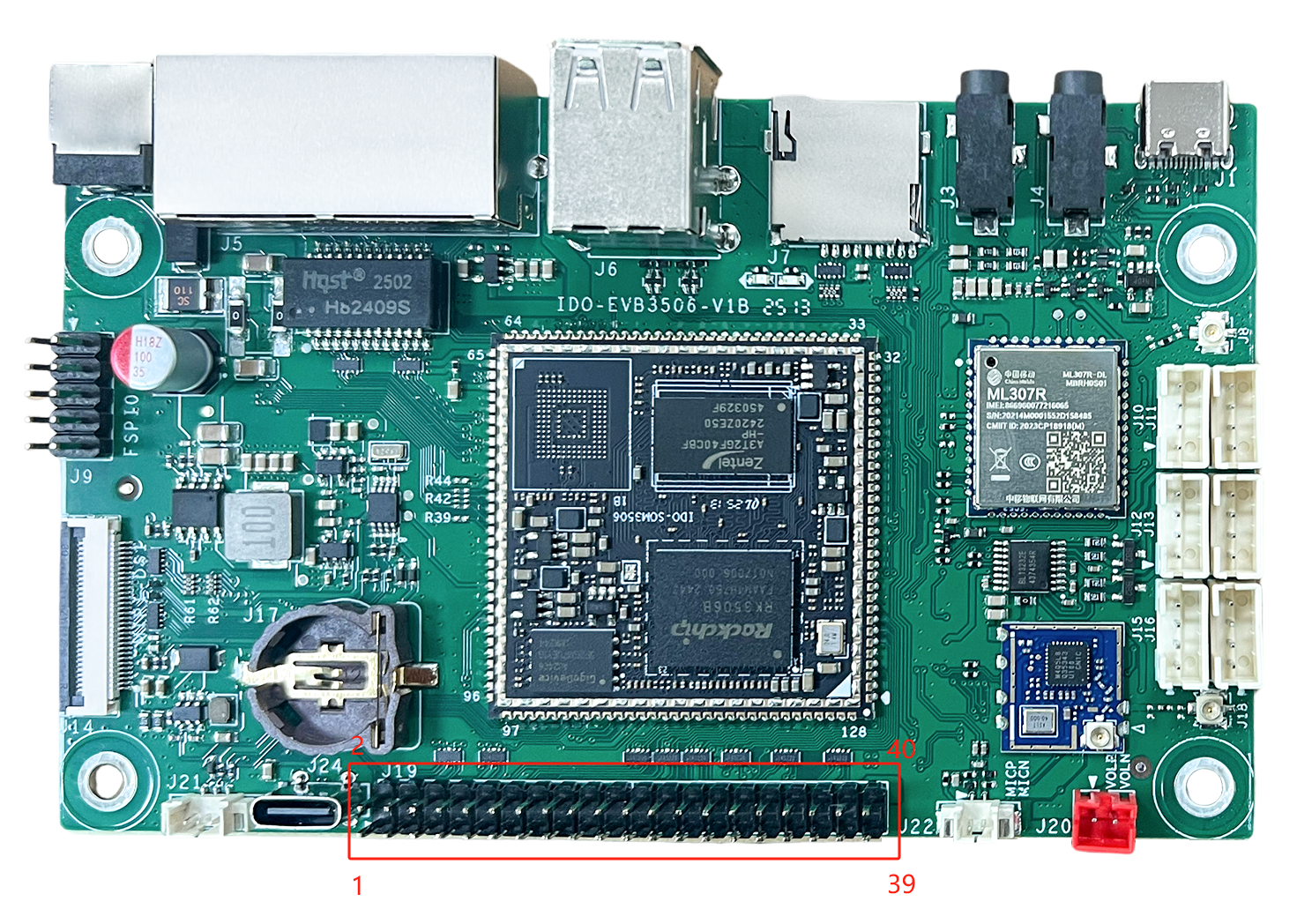
3.3 RGB接口
注意:主板预留1路RGB888显示输出接口,分辨率最大支持 1280×1280@60fps(和UART2、UART4以及其他GPIO复用,主板默认无RGB输出) ;
(J19) 2X20P 2.54mm间距 双排针 直针 黑色,如下图所示:
|
| |||
| 序号 | 定义 | 电平/V | 说明 |
| 1 | RGB_PWM | / | |
| 2 | LCD_PWREN_H_ | / | |
| 3 | TP_RST0 | / | |
| 4 | VO_LCDC_DEN/GPIO1_A0 | / | |
| 5 | TP_INT0 | / | |
| 6 | VO_LCDC_VSYNC/GPIO1_A1 | / | |
| 7 | TP_SCL0 | / | |
| 8 | VO_LCDC_HSYNC/GPIO1_A2 | / | |
| 9 | TP_SDA0 | / | |
| 10 | VO_LCDC_CLK/GPIO1_A3 | / | |
| 11 | VO_LCDC_D23/GPIO1_A4 | / | |
| 12 | GND | GND | |
| 13 | VO_LCDC_D22/GPIO1_A5 | / | |
| 14 | VO_LCDC_D19/GPIO1_B0 | / | |
| 15 | VO_LCDC_D21/GPIO1_A6 | / | |
| 16 | VO_LCDC_D18/UART2_TX/GPIO1_B1 | / | |
| 17 | VO_LCDC_D20/GPIO1_A7 | / | |
| 18 | VO_LCDC_D17/CAN0_TX/GPIO1_B2 | / | |
| 19 | GND | GND | |
| 20 | VO_LCDC_D16/CAN0_RX/GPIO1_B3 | / | |
| 21 | VO_LCDC_D15/GPIO1_B4 | / | |
| 22 | VO_LCDC_D11/GPIO1_C0 | / | |
| 23 | VO_LCDC_D14/GPIO1_B5 | / | |
| 24 | VO_LCDC_D10/DSM_AUD_RN/GPIO1_C1 | / | |
| 25 | VO_LCDC_D13/GPIO1_B6 | / | |
| 26 | VO_LCDC_D9/DSM_AUD_RP/GPIO1_C2 | / | |
| 27 | VO_LCDC_D12/GPIO1_B7 | / | |
| 28 | VO_LCDC_D8/UART2_RX/GPIO1_C3 | / | |
| 29 | VO_LCDC_D7/GPIO1_C4 | / | |
| 30 | GND | GND | |
| 31 | VO_LCDC_D6/GPIO1_C5 | / | |
| 32 | VO_LCDC_D3/GPIO1_D0 | / | |
| 33 | VO_LCDC_D5/GPIO1_C6 | / | |
| 34 | VO_LCDC_D2/UART4_RTSN/GPIO1_D1 | / | |
| 35 | VO_LCDC_D4/GPIO1_C7 | / | |
| 36 | VO_LCDC_D1/UART4_RX/GPIO1_D2 | / | |
| 37 | GND | GND | |
| 38 | VO_LCDC_D0/UART4_TX/GPIO1_D3 | / | |
| 39 | VCC5V0 | 5V | |
| 40 | VCC3V3 | 3V3 | |
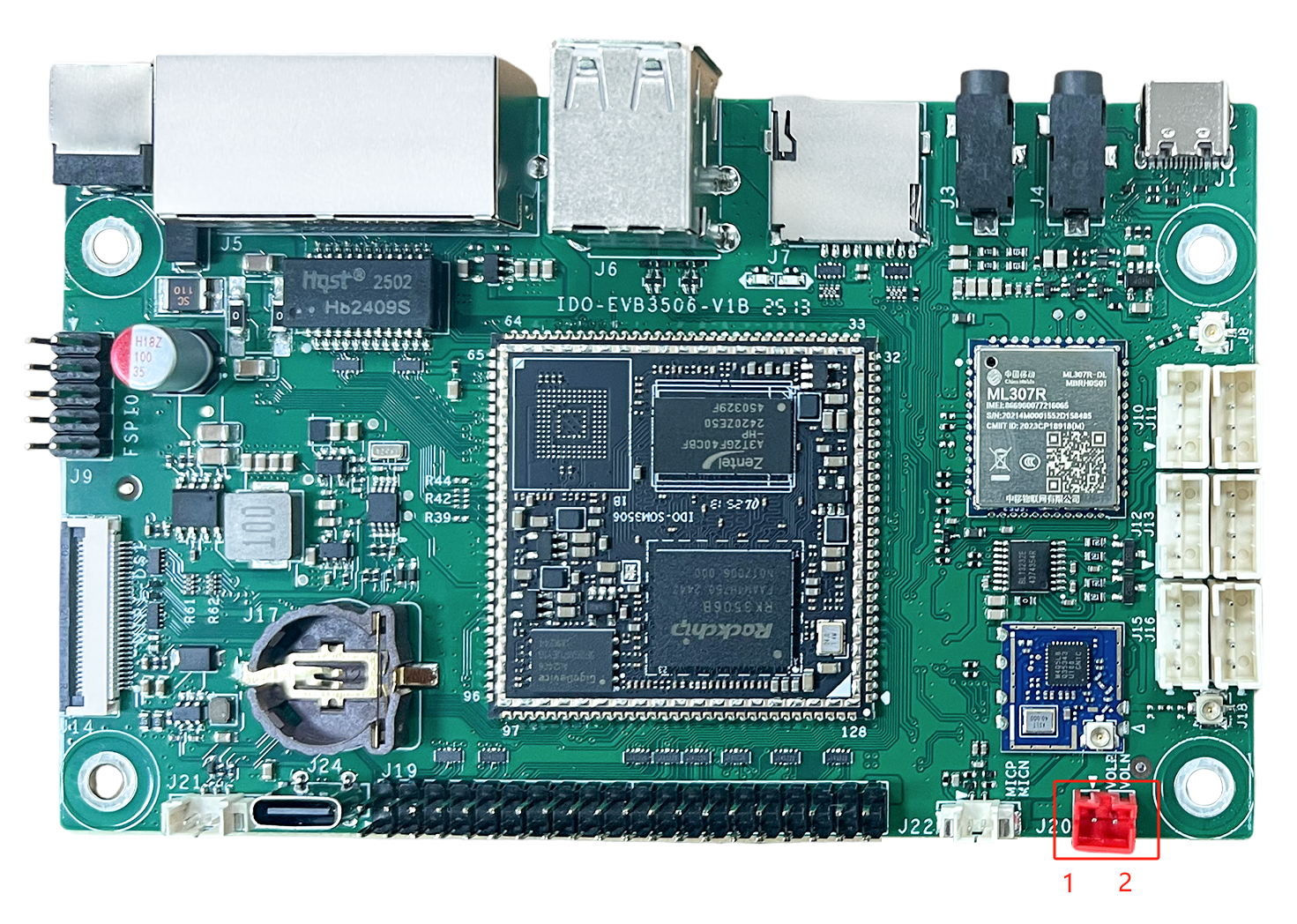
3.4 Speaker接口
(J20) PH2.0-2P 米白色 直针,单声道扬声器接口,支持4Ω 3W输出,如下图所示:
| 序号 | 定义 | 电平/V | 说明 |
| 1 | VOLP | / | 喇叭驱动输出差分信号P |
| 2 | VOLN | / | 喇叭驱动输出差分信号N |
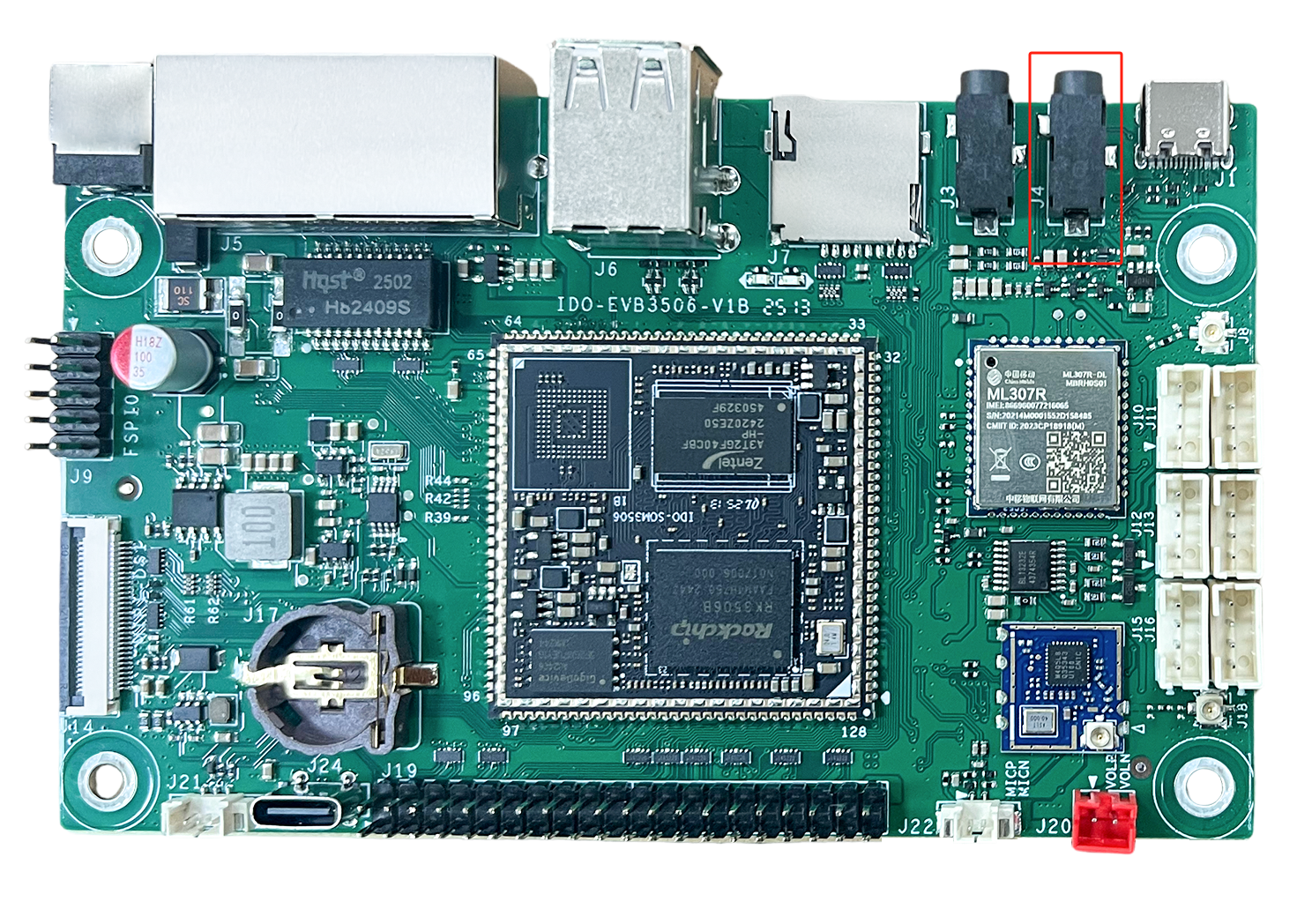
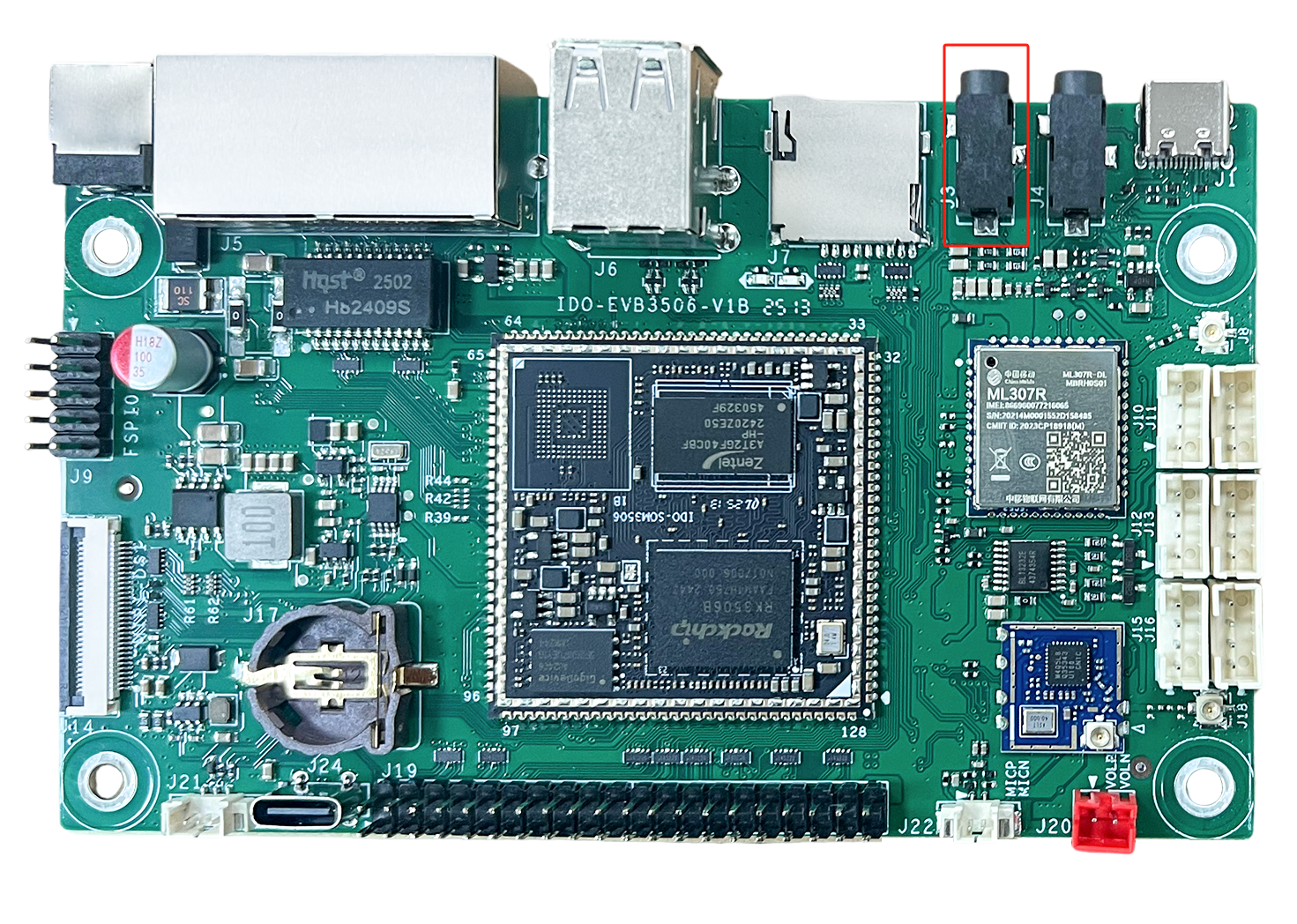
3.5 LINEIN接口
(J4) 支持1路3.5mm三节耳机座,用于输入来自其他音频设备的音频信号,如下图所示:
3.6 LINEOUT接口
(J3) 支持1路3.5mm三节耳机座,用于输出音频信号到其他的音频接收设备,如下图所示:
3.7 MIC接口
(J22) MX1.25-2P 立贴 米白色 单麦克风录音接口,支持驻极体麦克风输入,如下图所示:
|
| |||
| 序号 | 定义 | 电平/V | 说明 |
| 1 | ACODEC_ADC_INP | / | 麦克风音频输入差分信号N |
| 2 | ACODEC_ADC_INN | / | 麦克风音频输入差分信号P |
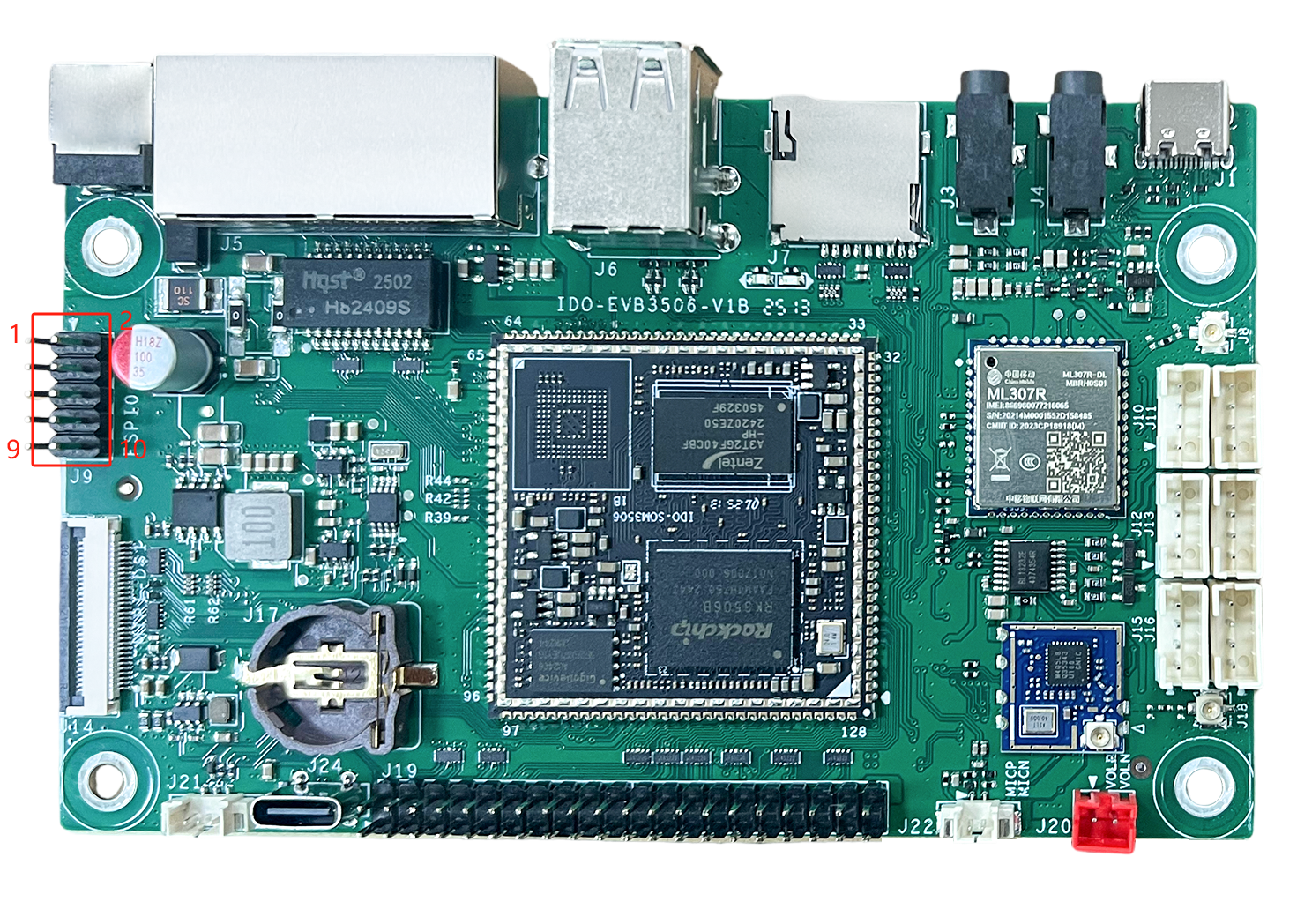
3.8 FSPI接口
注意:支持1路FSPI接口(和NAND FLASH复用,NAND FLASH版本默认无FSPI接口功能);
(J9) 2X5P 2.54mm间距 双排针 直针 黑色,如下图所示:
|
| |||
| 序号 | 定义 | 电平/V | 说明 |
| 1 | FSPI_CSN | 3.3V | FSPI信号组 |
| 2 | FSPI_D1 | 3.3V | |
| 3 | FSPI_CLK | 3.3V | |
| 4 | FSPI_D2 | 3.3V | |
| 5 | FSPI_D0 | 3.3V | |
| 6 | FSPI_D3 | 3.3V | |
| 7 | VCC5V0 | 5V | 3.3V电源输出 |
| 8 | VCC3V3 | 3.3V | 5V电源输出 |
| 9 | GND | GND | 电源地 |
| 10 | GND | GND | 电源地 |
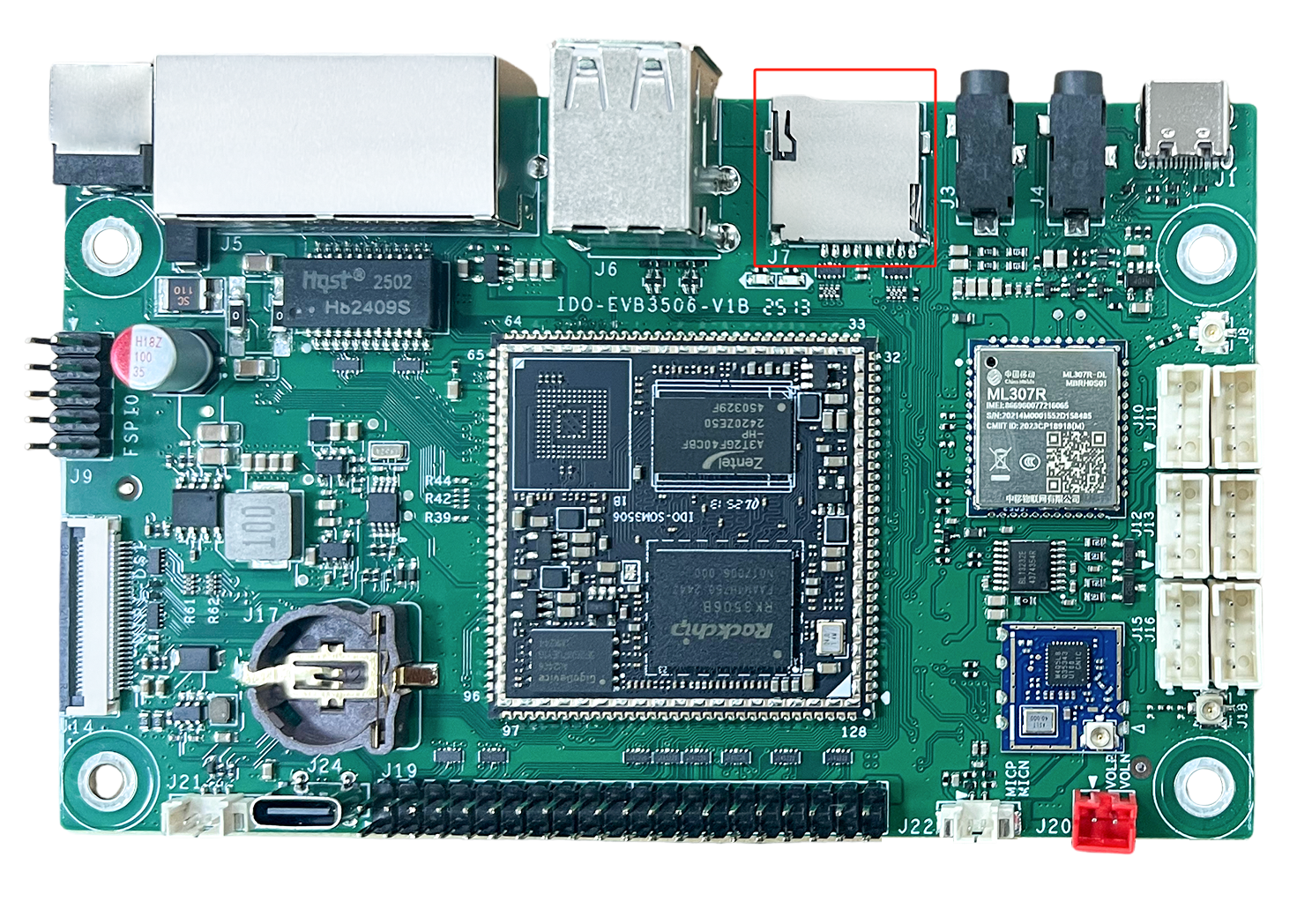
3.9 TF卡接口
注意:支持1路高速SD卡扩展(和eMMC复用,eMMC版本默认无SD卡功能);
(J7) TF卡座支持高速SD卡,如下图所示:
3.10 USB接口
开发板支持3个USB2.0接口,1个TypeC接口,2个USB2.0 TYPEA接口,USB对外总供电应小于2A。
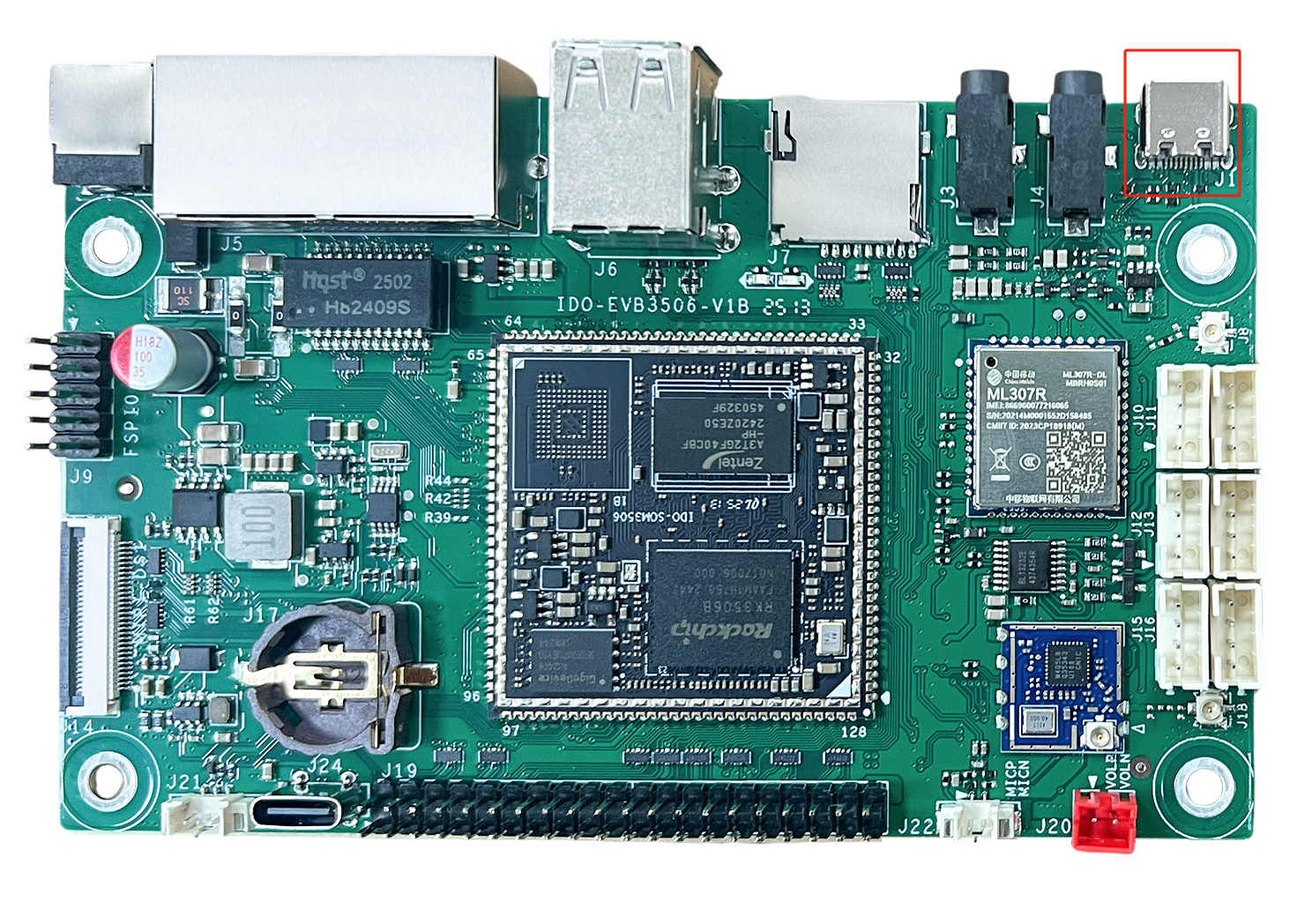
3.10.1 Type-C接口
(J1) 主板支持1个Type-C接口(USB2.0 OTG),可用来下载固件,如下图所示:
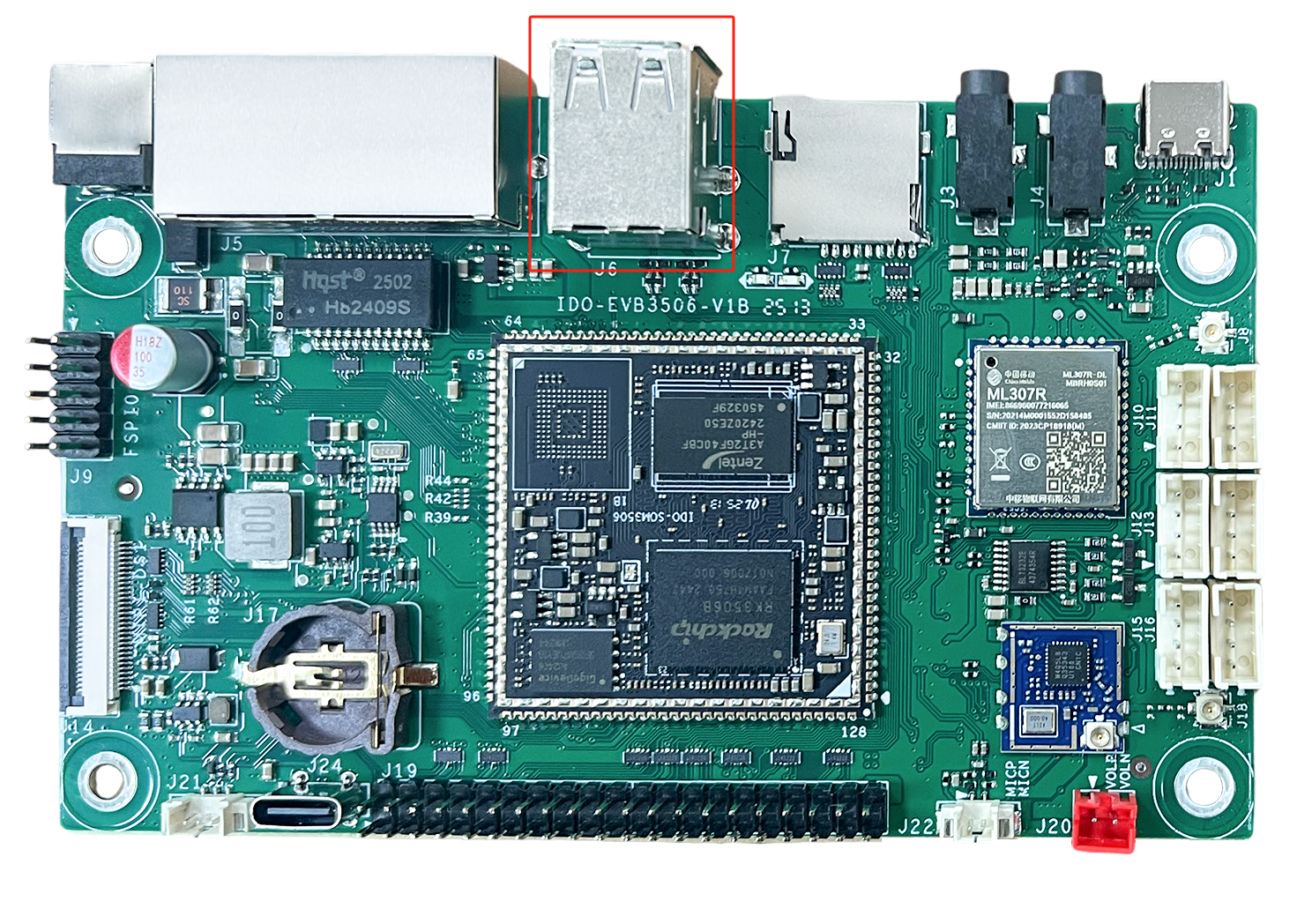
3.10.2 Type-A接口
(J6)主板默认支持2个USB2.0接口,USB接口默认提供5V@1A的驱动能力。
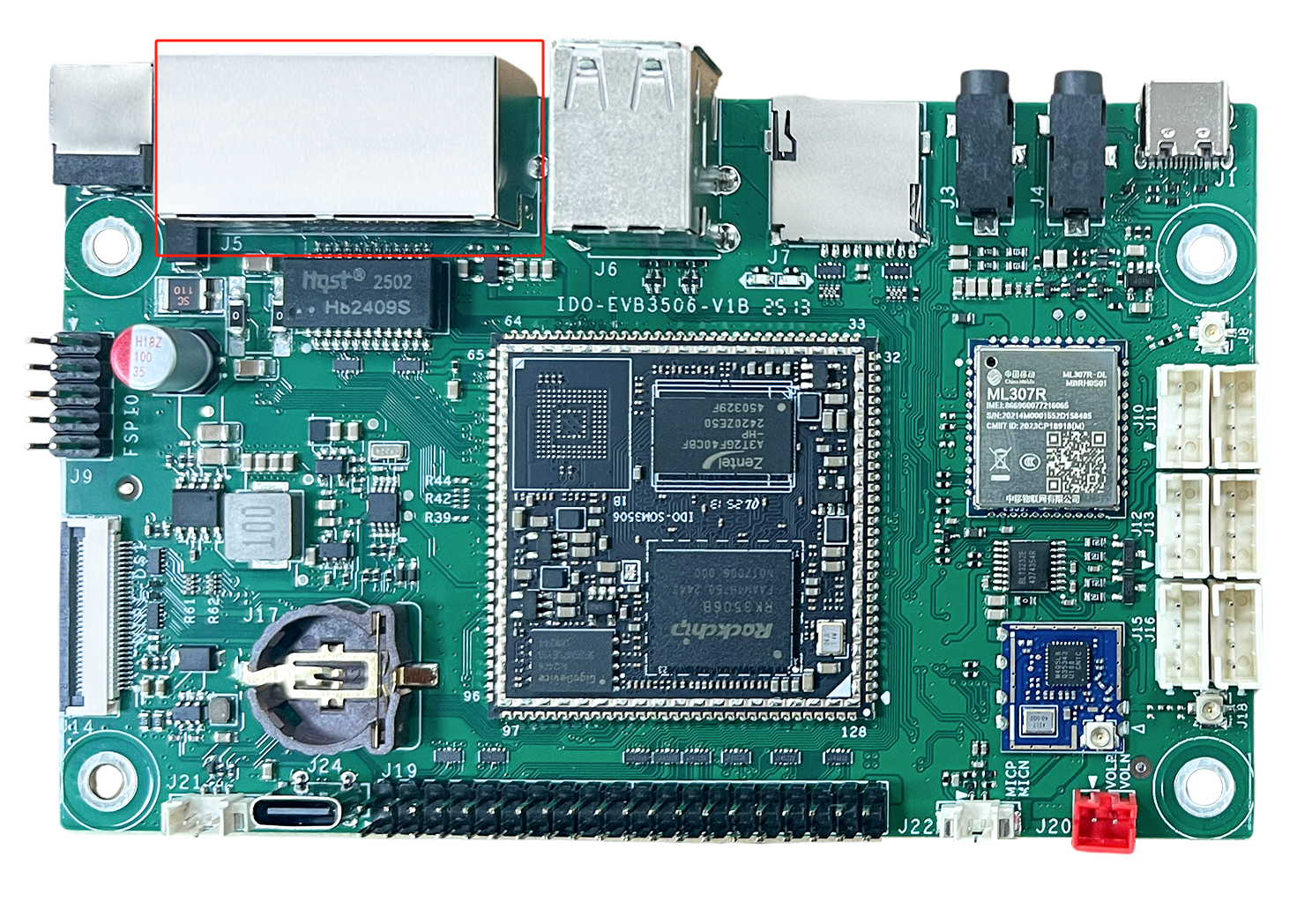
3.11 Ethernet接口
(J5)适应双百兆网口,支持WAN口+LAN口 双IP,如下图所示:
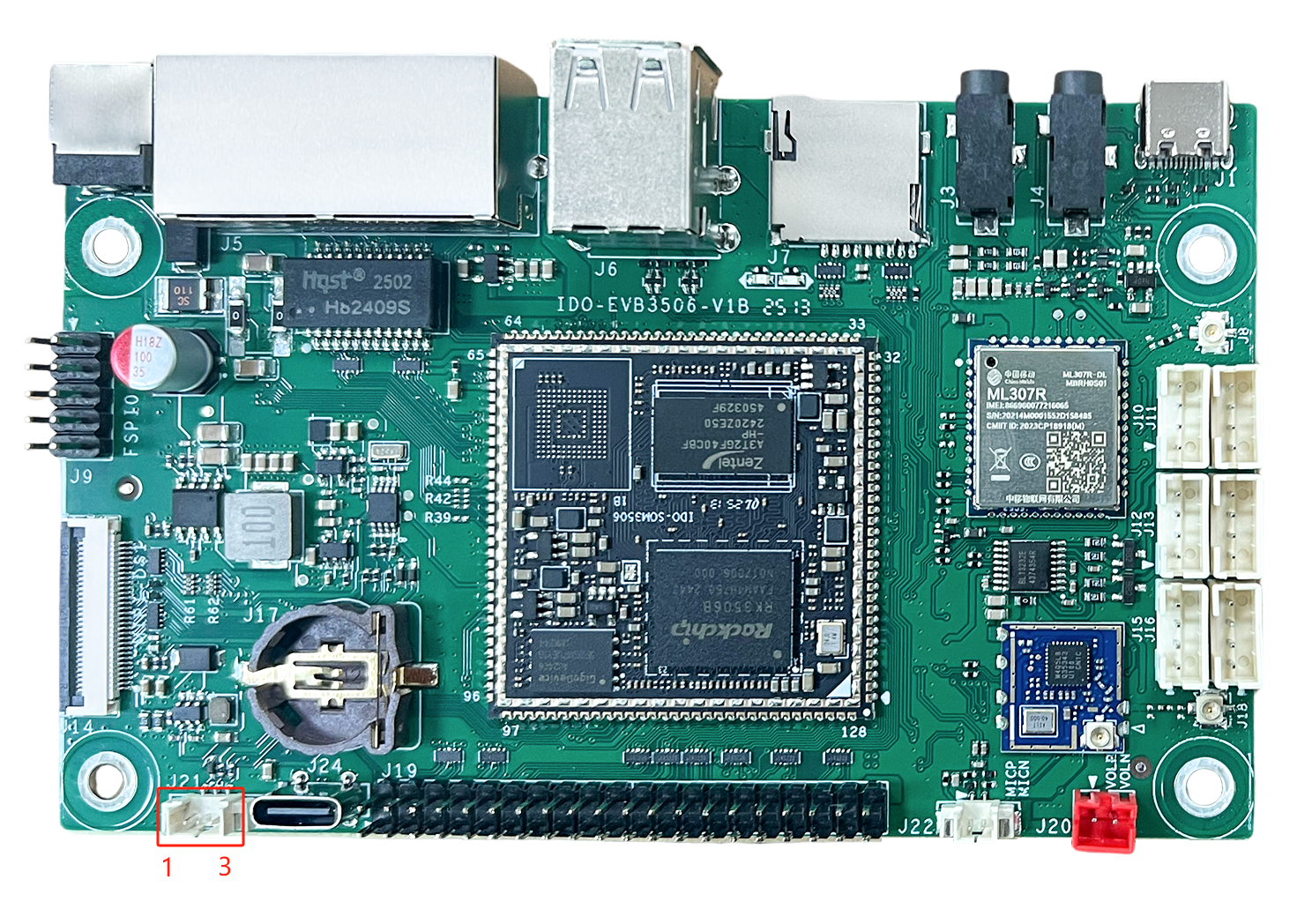
3.12 调试串口
(J21) 1.25T 3P 立贴 米白色,如下图所示:
|
| |||
| 序号 | 定义 | 电平/V | 说明 |
| 1 | UART0_RX_Debug | 3.3V TTL | 默认1.5Mbps波特率 |
| 2 | UART0_TX_Debug | 3.3V TTL | |
| 3 | GND | GND | 电源地 |
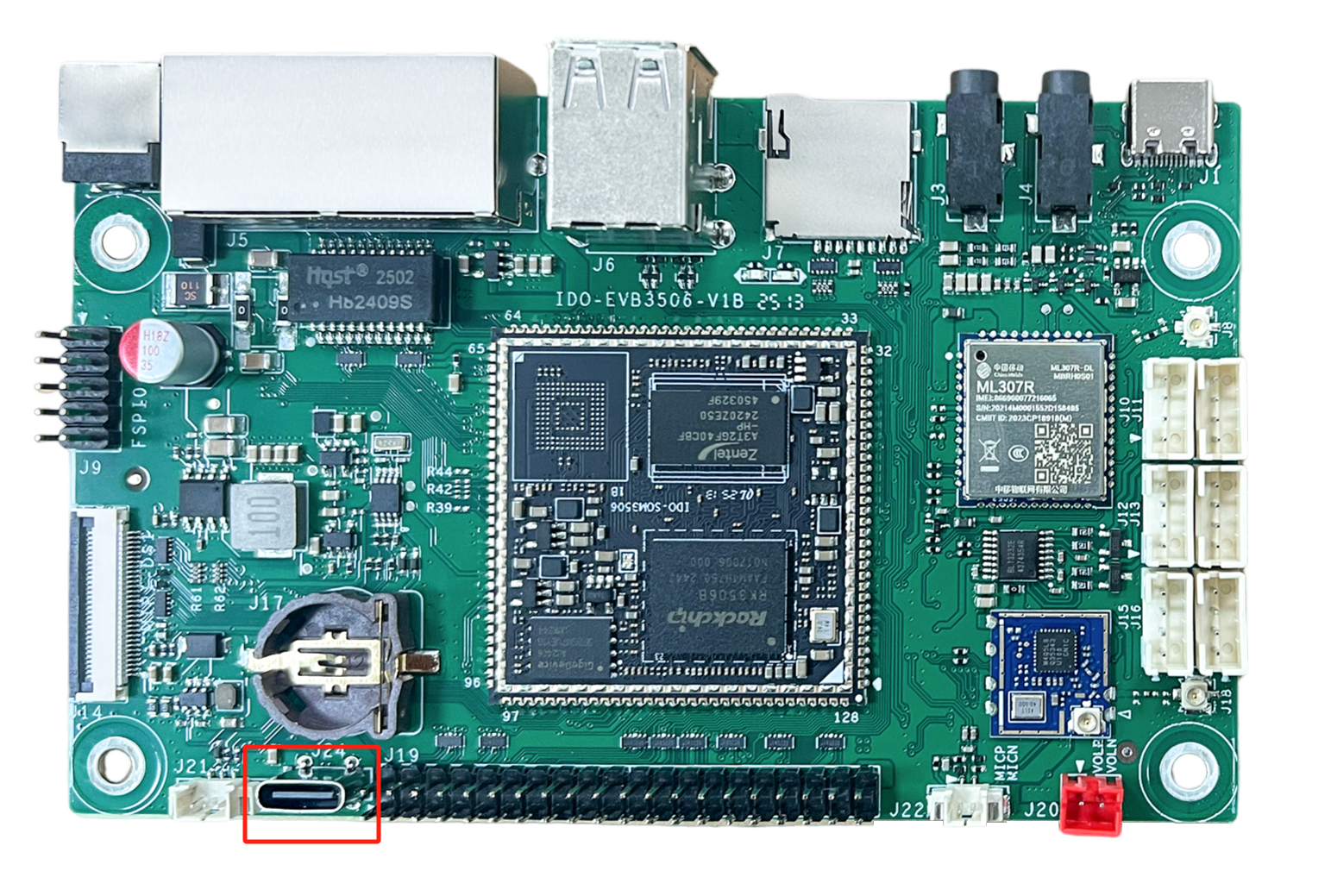
(J24) TypeC 立贴调试口,如下图所示:
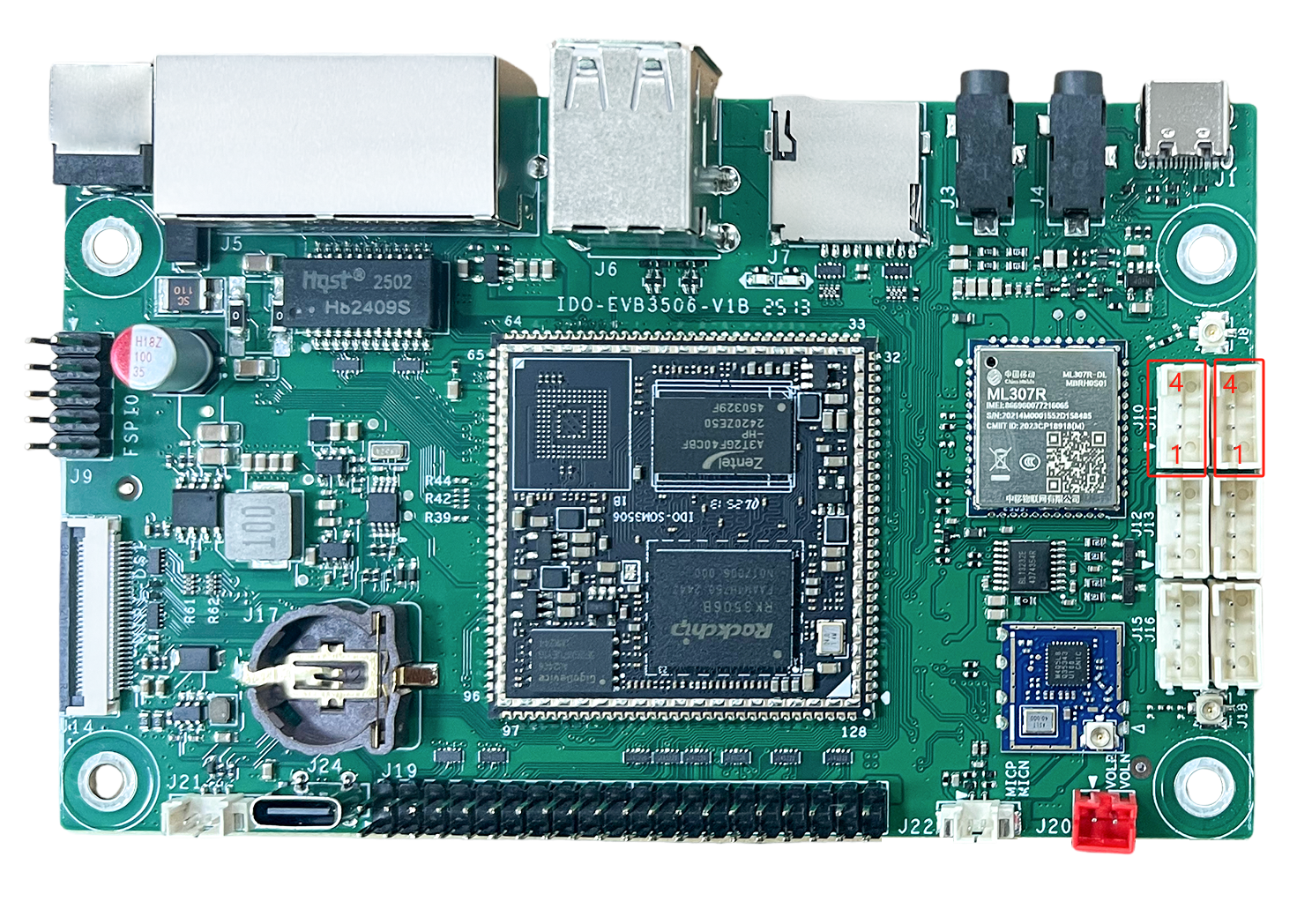
3.13 串口通信
IDO-EVB3506-V1主板一共扩展4路通信串口(不含调试UART),4路串口通过4个PH2.0-4P米白色座子接出(2路RS232和2路RS485),其中 UART2和 UART4与RGB屏幕复用, 接RGB屏幕时J11和J13不可用。
3.13.1 RS232
(J10、J11) PH2.0-4P 米白色 直针,如下图所示:
|
| ||||
| 连接器 | 序号 | 定义 | 电平/V | 说明 |
| J10 | 1 | VCC | 5V | 5V供电输出 |
| 2 | RS232_RX1 | / | 设备节点(/dev/ttyS1) | |
| 3 | RS232_TX1 | / | ||
| 4 | GND | GND | 电源地 | |
| J11(默认不使用) | 1 | VCC | 5V | 5V供电输出 |
| 2 | RS232_RX2 | / | 设备节点(/dev/ttyS2) | |
| 3 | RS232_TX2 | / | ||
| 4 | GND | GND | 电源地 | |
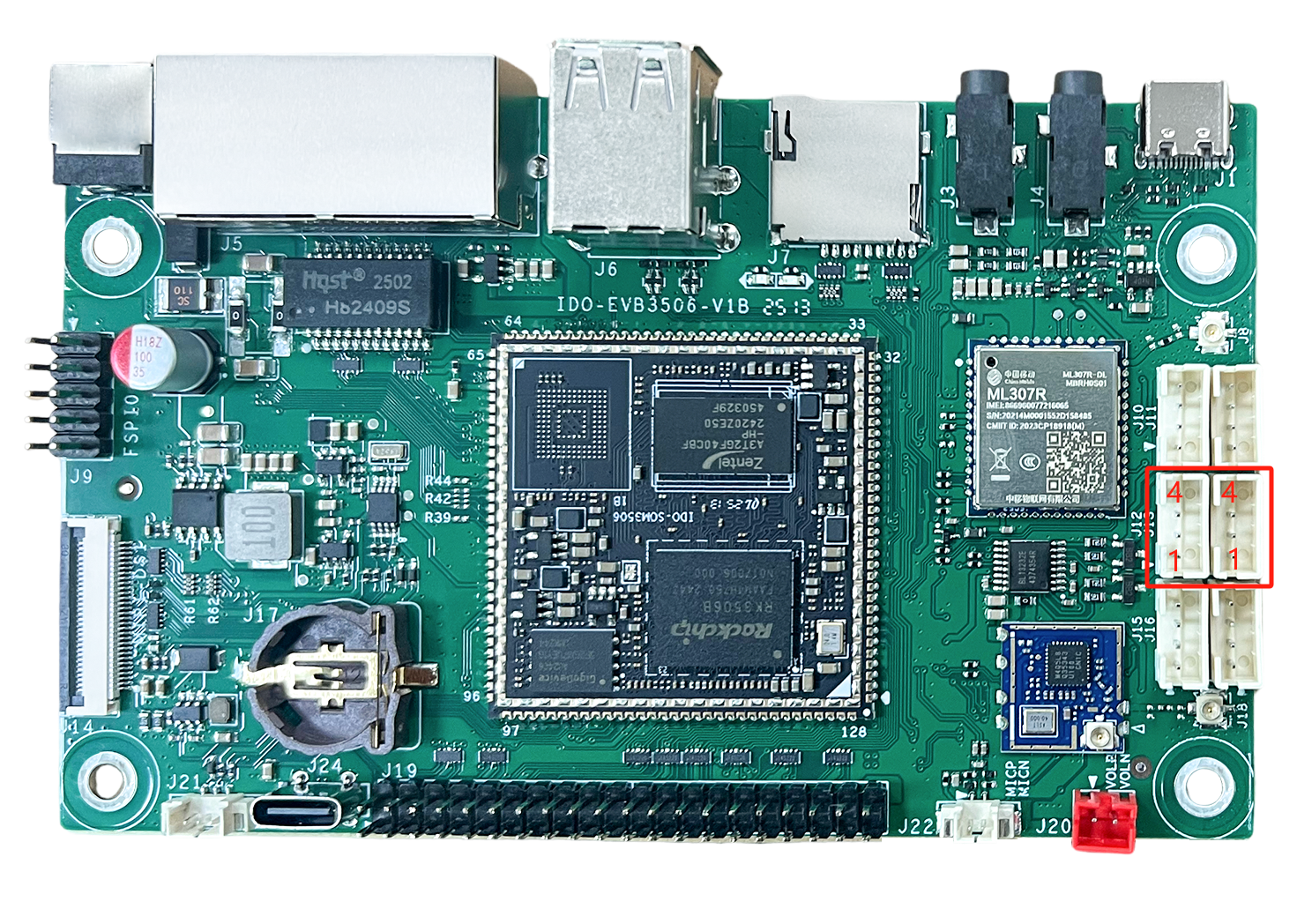
3.13.2 RS485
(J12、J13) PH2.0-4P 米白色 直针,如下图所示:
|
| ||||
| 连接器 | 序号 | 定义 | 电平/V | 说明 |
| J12 | 1 | VCC | 5V | 5V供电输出 |
| 2 | RS485_A4 | / | 设备节点(/dev/ttyS4) | |
| 3 | RS485_B4 | / | ||
| 4 | GND | GND | 电源地 | |
| J13(默认不使用) | 1 | VCC | 5V | 5V供电输出 |
| 2 | RS485_A3 | / | 设备节点(/dev/ttyS3) | |
| 3 | RS485_B3 | / | ||
| 4 | GND | GND | 电源地 | |
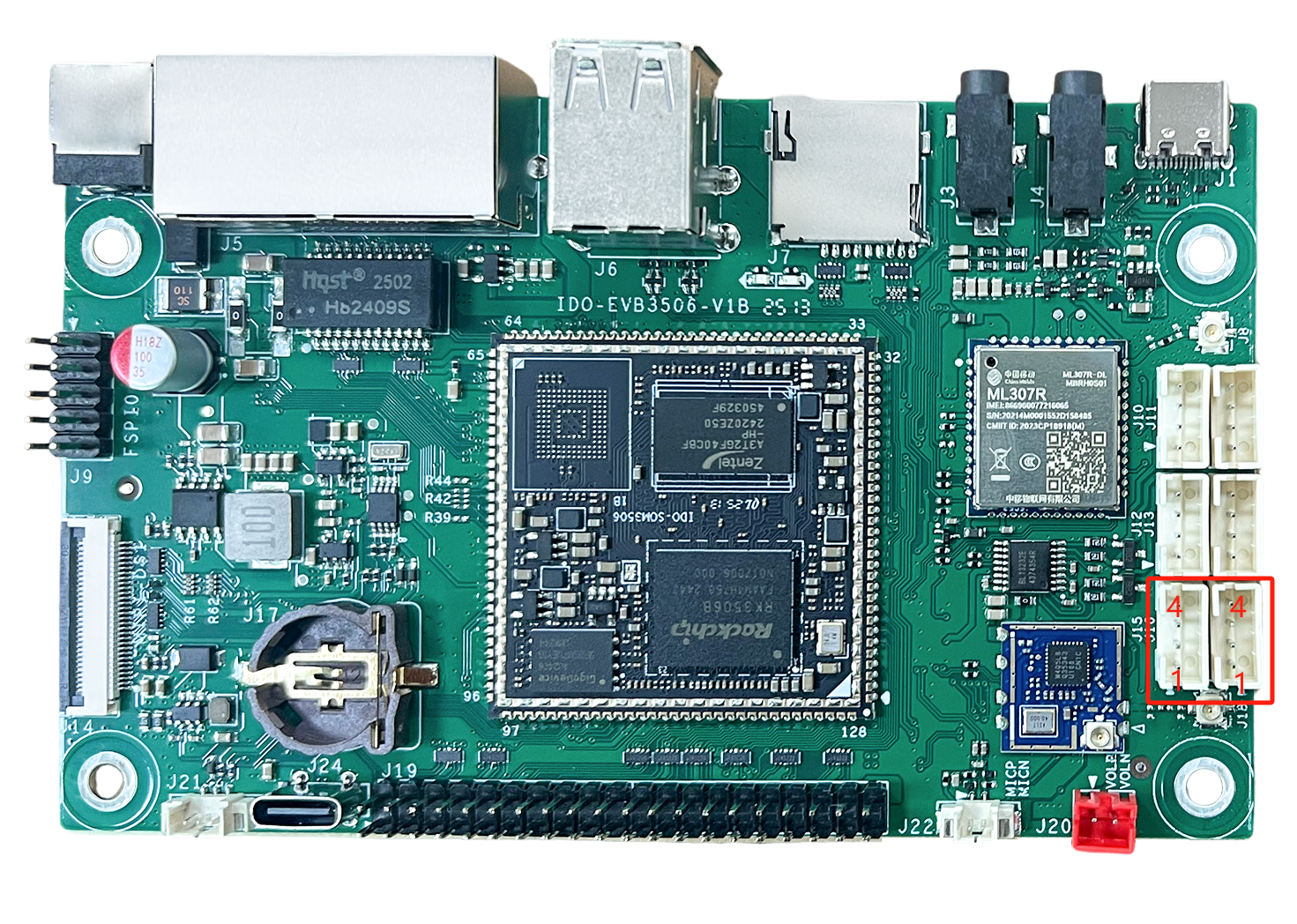
3.14 CAN接口
IDO-EVB3506-V1主板一共扩展2路CAN接口,2路CAN接口通过2个PH2.0-4P米白色座子接出,其中 CAN0与RGB屏幕复用, 接RGB屏幕时CAN0不可用。
(J15、J16) PH2.0-4P 米白色 直针,如下图所示:
|
| ||||
| 序号 | 定义 | 电平/V | 说明 | |
| J15 | 5 | VCC | 5V | 5V供电输出 |
| 6 | CAN1_H | / | CAN信号 | |
| 7 | CAN1_L | / | ||
| 8 | GND | GND | 电源地 | |
| J16(默认不使用) | 1 | VCC | 5V | 5V供电输出 |
| 2 | CAN0_H | / | CAN信号 | |
| 3 | CAN0_L | / | ||
| 4 | GND | GND | 电源地 | |
3.15 WLAN+BLE+SLE
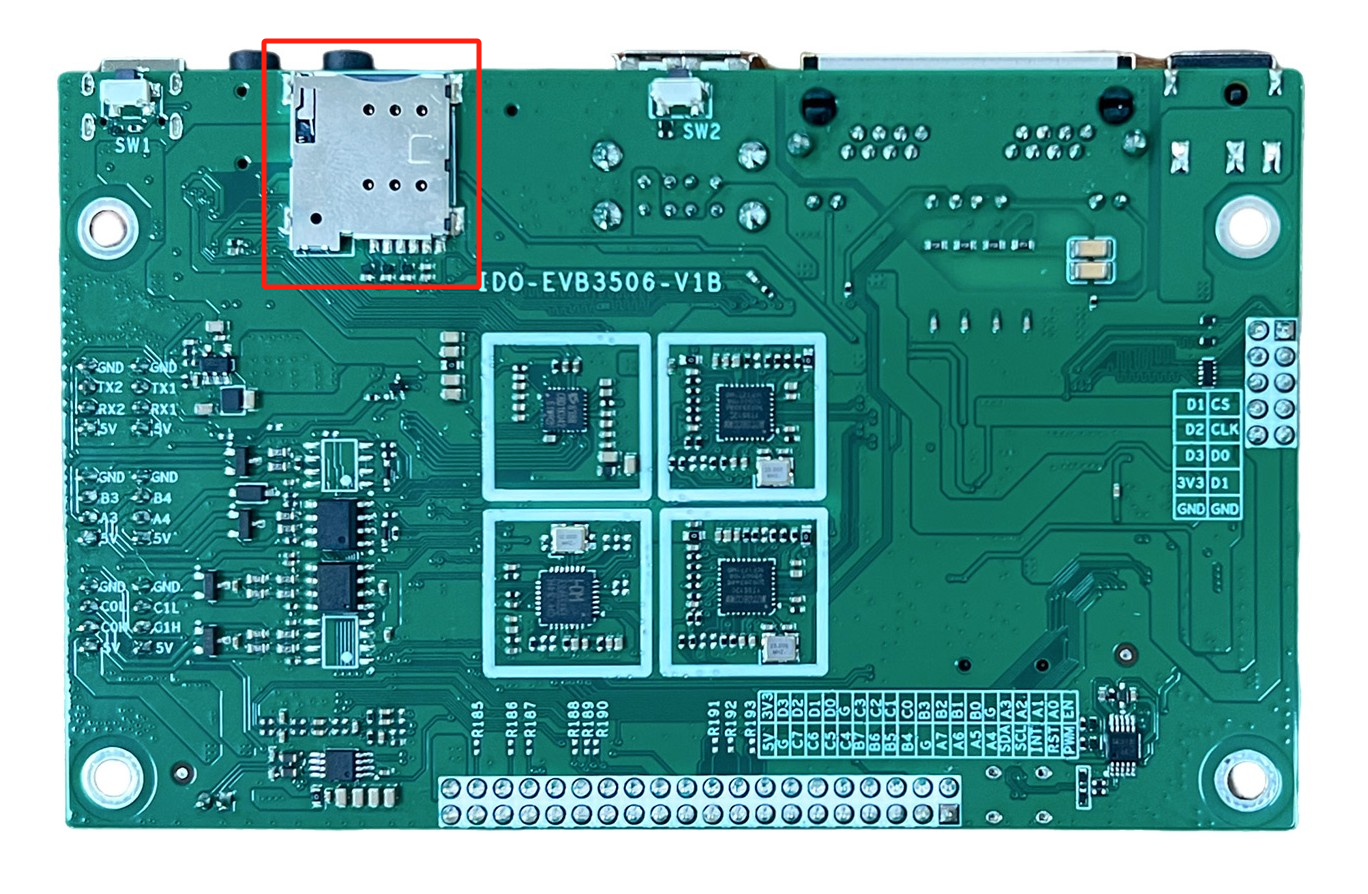
(J18) 默认板载星闪模组,支持2.4GHz WLAN+BLE+SLE,外置1个IPEX一代天线座,如下图所示:
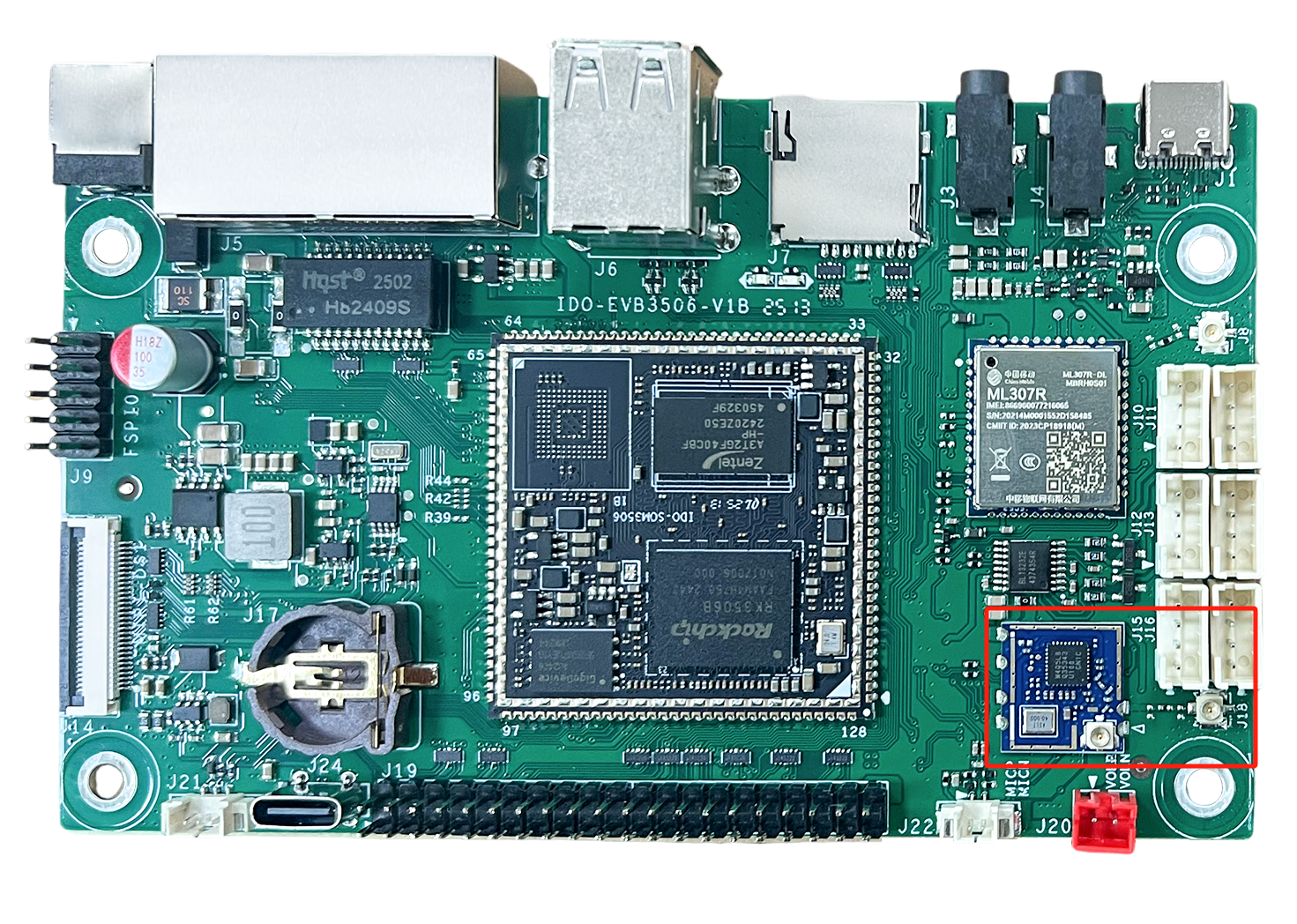
IDO-EVB3506-V1 IPEX天线座一代示意图,如下图所示:
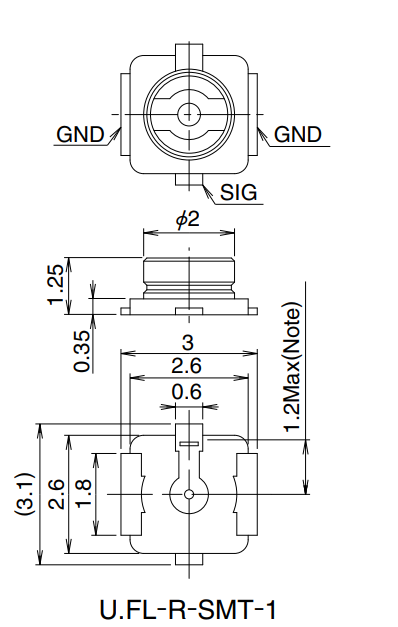
3.16 4G LTE Cat1
开发板板载中移4G LTE Cat1模组(ML307R-DC),上行速率最大支持5Mbps,下行速率最大支持10Mbps,如下图所示:
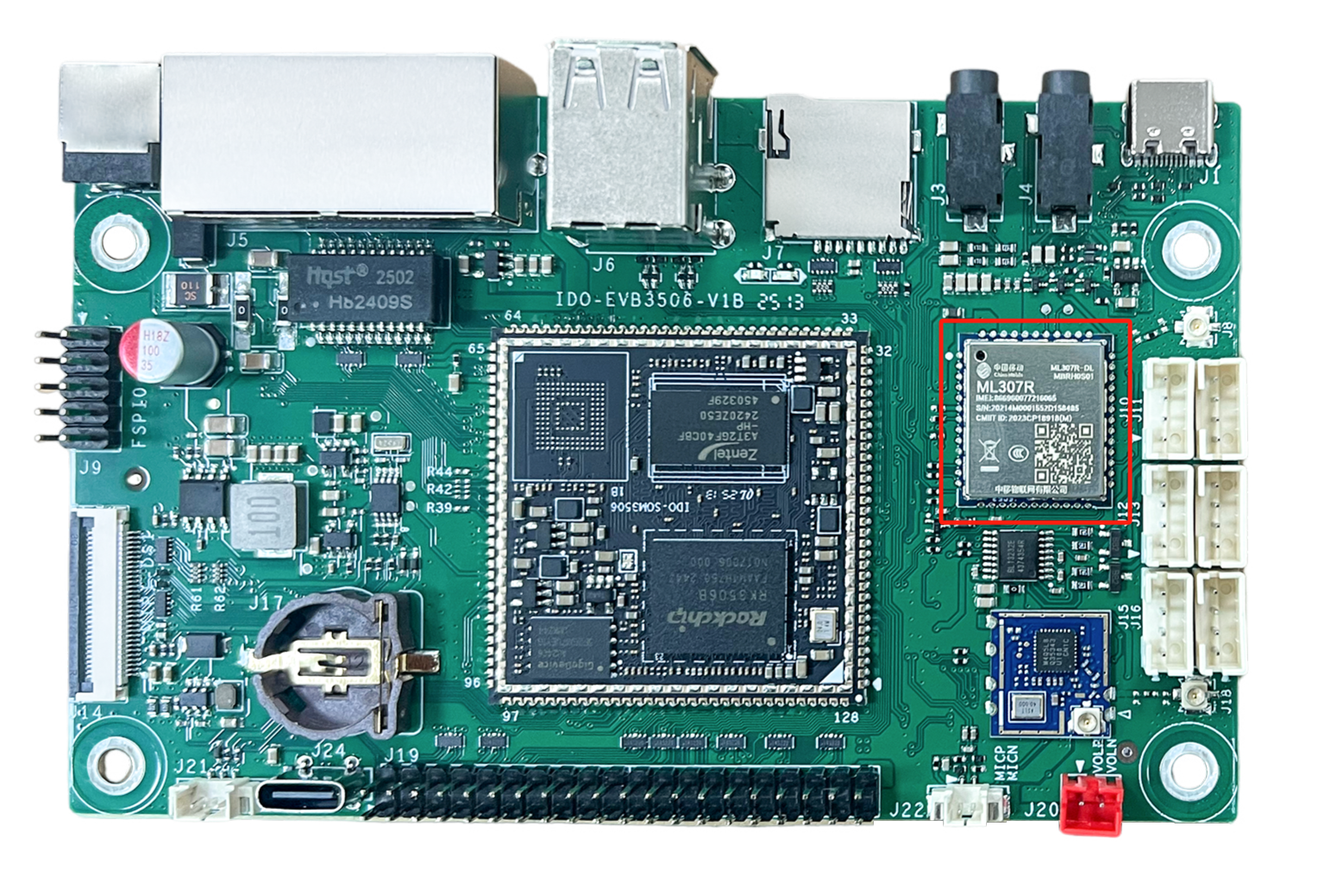
3.17 SIM卡座
(J23) SIM卡座位于主板背面,将标准尺寸SIM卡放入卡槽,如下表所示:
|
| |||
| 序号 | 名称 | 图片 | |
| 1 | NANO SIM卡 |
| |

3.18 RTC电池
(J17) 主板留有一个CR1220纽扣电池给RTC供电,保证主板在断电情况下,时间保持正常运作,如下图所示:
3.19 LED指示灯
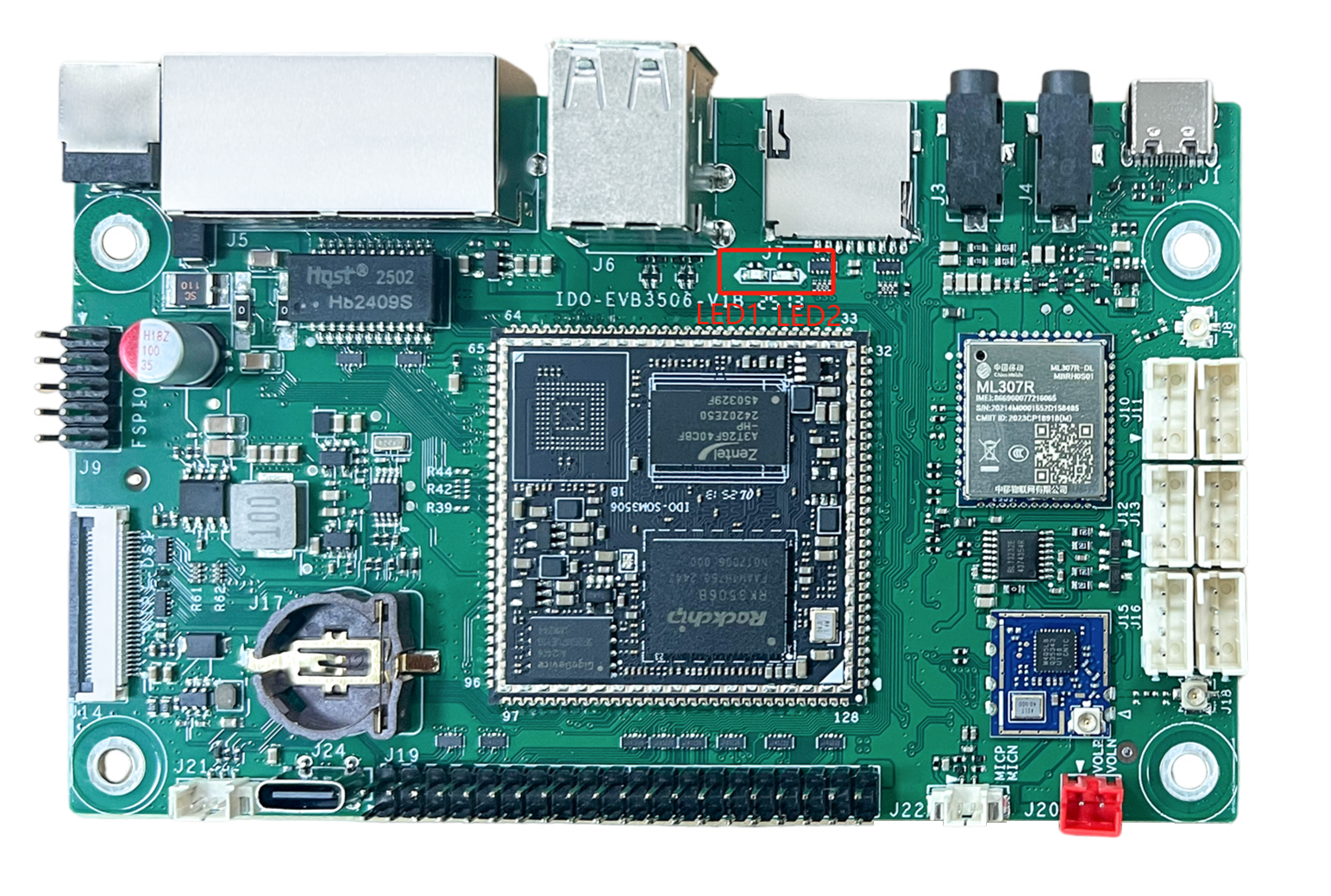
LED指示灯如下图所示:
|
| |||
| 序号 | 定义 | 电平/V | 说明 |
| 蓝灯(LED1) | POWER_LED | 3.3V | 上电常亮指示灯 |
| 蓝灯(LED2) | 4G_LED | 3.3V | 4G模块的工作指示灯 |
3.20 按键
主板提供了2种按键(Recovery按键、Reset按键),方便开发调试使用。
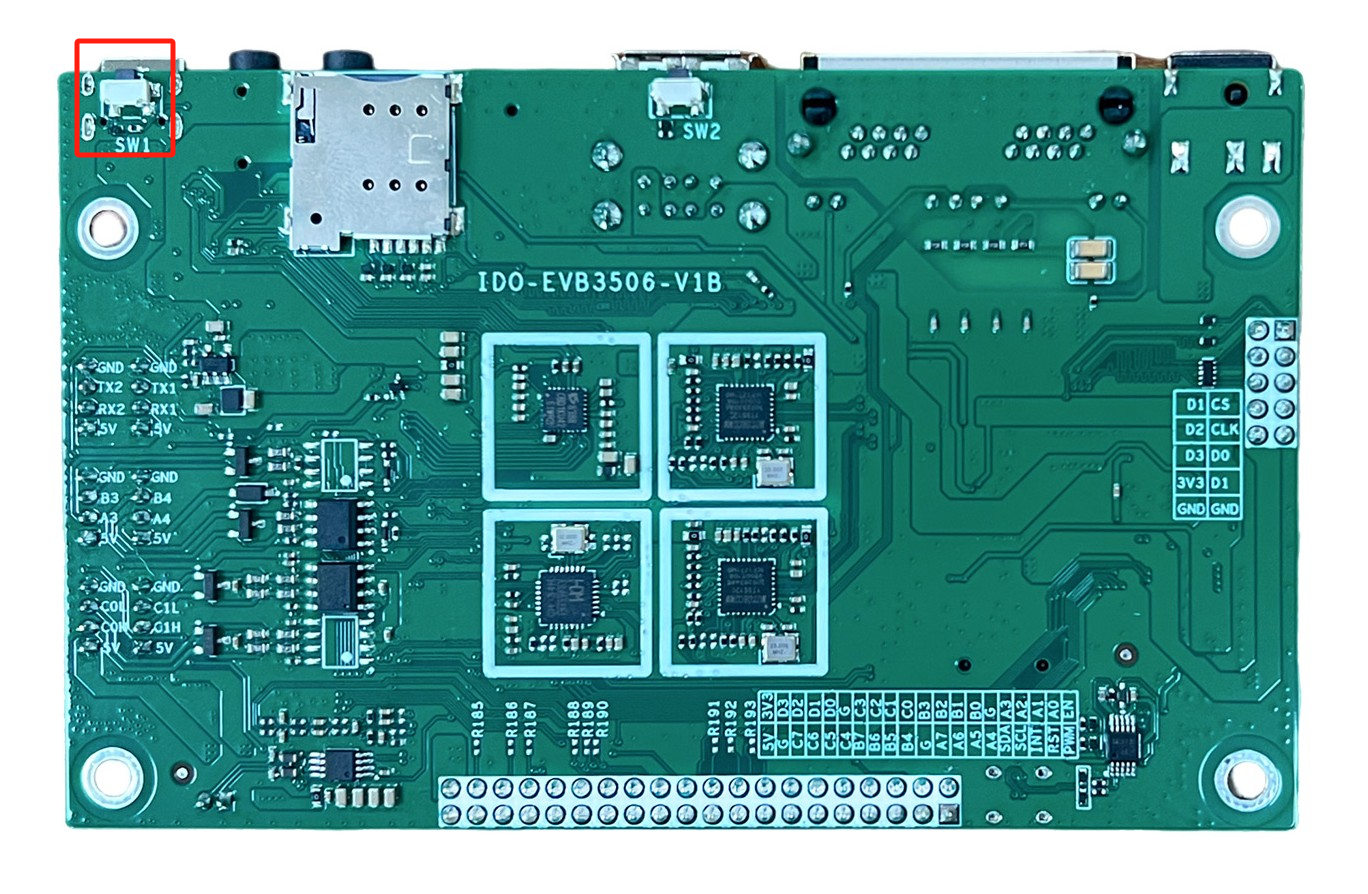
3.20.1 Recovery按键
(SW1) Recovery按键默认为高电平(1.8V),
关机状态下:在没有按键动作且系统已经烧录固件的前提下,上电直接进入系统;若系统启动时 Recovery 按键处于按下状态,且电脑通过USB线连接主板TypeC接口,则RK3506进入 Loader 烧写模式,当PC 识别到USB 设备时,松开按键恢复为高电平(1.8V),即可进行固件烧写,系统开机后此按键为音量+键。
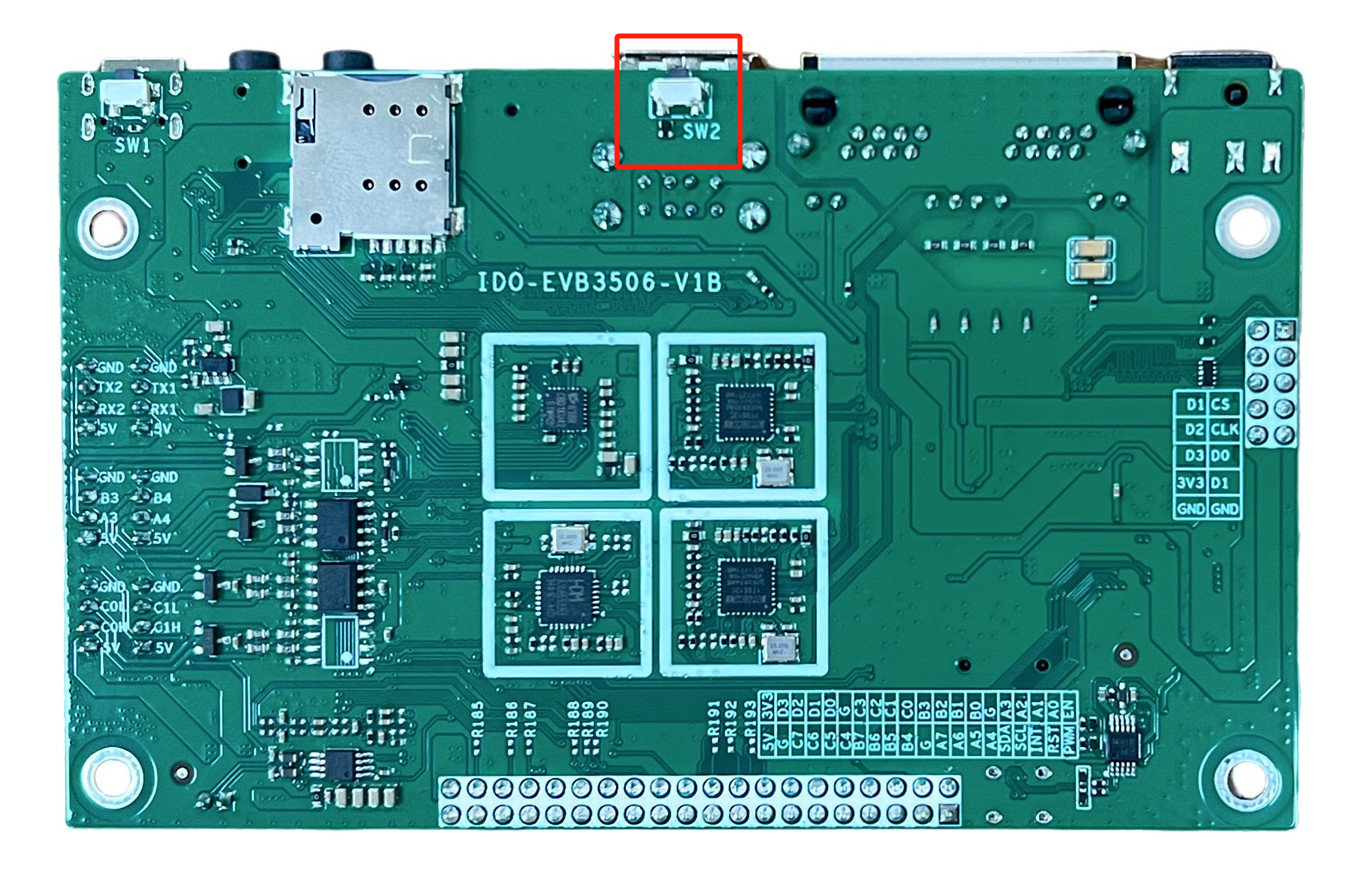
3.20.2 Reset按键
(SW2) 开机状态下,按下Reset按键,系统复位。如下图所示:
4 电气性能
4.1 标准电源
标准电源性能,如下图所示:
| 属性 | 最小 | 典型 | 最大 | |
| 标准电源 | 电压 | 9V | 12V | 26V |
| 纹波 | / | / | 100mV | |
| 电流 | 0.5A | / | / | |
4.2 裸板工作电流
裸板工作电流:不接任何外设下的工作电流,如下表所示:
| 属性 | 最小 | 典型 | 最大 | |
| 标准电源 (12V适配器) | 静态桌面工作电流 | / | 70mA | 80mA |
| 关机电流 | / | |||
| CPU负载工作电流 | / | |||
4.3 USB供电
USB供电,如下表所示:
| 属性 | 电压 | 典型电流 | 最大电流 | |
| 标准电源 | TYPEC2.0 OTG | / | / | 1000mA |
| USB2.0 HOST | / | / | 1000mA | |
注意:USB 外设总电流建议不超过 2000mA ,否则会导致机器无法正常运转。
4.4 MIPI屏工作电流
MIPI屏工作电流,如下表所示:
| 属性 | 最小 | 典型 | 最大 | |
| MIPI屏工作电流 | 3.3V工作电流 | / | 400mA | 800mA |
| 5V工作电流 | / | / | / | |
| 12V工作电流 | / | / | / | |









,HDMI)









)