哈喽,我是我不是小upper~
今天想跟大家聊聊支持向量机(SVM)。很多初学者对这个算法模型特别感兴趣,它也是初学者在学习过程中非常喜爱的一种模型,更是机器学习领域中极为重要的算法之一!
今天想跟大家深入探讨一下支持向量机(SVM)的细节,咱们主要从以下几个方面来展开~
SVM 的基础内容
-
线性可分 SVM
-
在较为简单且理想的情况下,数据是线性可分的,也就是说,可以通过一个直线(在二维空间中)或平面(在三维空间中)等超平面,将不同类别的数据点完美地分隔开来。
-
最优超平面:我们的目标是找到这样一个超平面,它能够使得最近的数据点(我们把这些数据点称作支持向量)到超平面的距离达到最大值。在二维空间里,超平面就表现为一条直线。
-
数学表达:超平面可以用下面的方程来表示:
其中,w 是超平面的法向量,b 是偏置项。
-
决策规则:基于超平面,我们采用符号函数来进行分类决策,具体如下:
-
优化问题:我们的主要目标是最大化边距,这可以转化为如下的优化问题:

-
-
非线性 SVM 和核方法
-
然而,在现实场景中,数据往往并不是线性可分的。这时,核方法就派上用场了。核方法通过一个非线性映射,将原始特征空间映射到一个更高维的空间。在新的特征空间中,数据可能就变得线性可分了。
-
核函数:常见的核函数有多种,例如多项式核、径向基函数(RBF,也常被称为高斯核)等。
-
核函数的作用:借助核函数,我们能够在原始空间中计算出点积,而无需将数据点显式地表示在高维空间中。这大大简化了计算过程,同时也避免了高维空间带来的计算复杂度问题。
-
-
软间隔和正则化
-
在现实世界的数据中,很少有数据是完全线性可分的。因此,我们引入了软间隔的概念,允许一些数据点可以违反边距规则。
-
松弛变量:为了处理数据点的重叠和非可分情况,我们引入了松弛变量 ξi。
-
正则化参数 C:参数 C 用于控制边距的硬度以及对错误分类样本的惩罚程度,它是一个正则化参数。通过调整 C 的值,我们可以在模型的复杂度和分类准确性之间取得平衡。
-
-
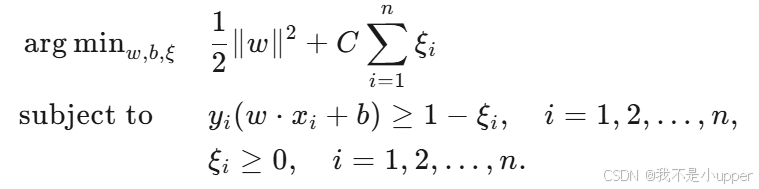
优化问题(软间隔)
-
对于软间隔 SVM,优化问题转变为:
-
以下是对支持向量机(SVM)原理及项目实践的系统化阐述,基于技术细节展开并强化理论与代码的对应关系:
1. SVM 核心原理与数学基础
1.1 线性可分场景:硬间隔 SVM
当样本数据在特征空间中线性可分时,SVM 的目标是寻找一个最优超平面,使得不同类别数据点到超平面的几何间隔最大化。
- 超平面方程:在 n 维空间中,超平面由
表示,其中
为法向量,决定超平面方向;b 为偏置项,决定超平面位置。
- 几何间隔:样本点
到超平面的距离为
,其中
为类别标签。
- 优化目标:最大化所有样本点的最小几何间隔,等价于求解以下凸二次规划问题:
 该问题的解由少数关键样本点(支持向量)决定,这些点位于间隔边界上(
该问题的解由少数关键样本点(支持向量)决定,这些点位于间隔边界上()。
1.2 非线性场景:核方法与特征空间映射
当数据在原始特征空间非线性可分时,SVM 通过核函数将样本映射到更高维的特征空间 ,使数据在
中线性可分。
- 核函数定义:核函数
表示原始空间中样本在高维空间的内积,避免了显式计算高维坐标(如
为映射函数)。
- 常用核函数:
- 线性核:
,适用于线性可分数据。
- 多项式核:
,引入多项式特征。
- 高斯核(RBF):
,通过参数
控制局部影响范围。
- 线性核:
1.3 现实场景:软间隔与正则化
由于噪声和数据重叠的普遍存在,SVM 引入软间隔允许部分样本违反间隔约束,通过松弛变量 量化样本的 “违规程度”。
- 优化问题调整:
其中 C > 0 为正则化参数:
- C 越大,对分类错误的惩罚越强,模型复杂度越高(过拟合风险增加);
- C 越小,允许更多分类错误,模型更倾向于最大化间隔(泛化能力增强)。
2. SVM 决策边界可视化与代码实现
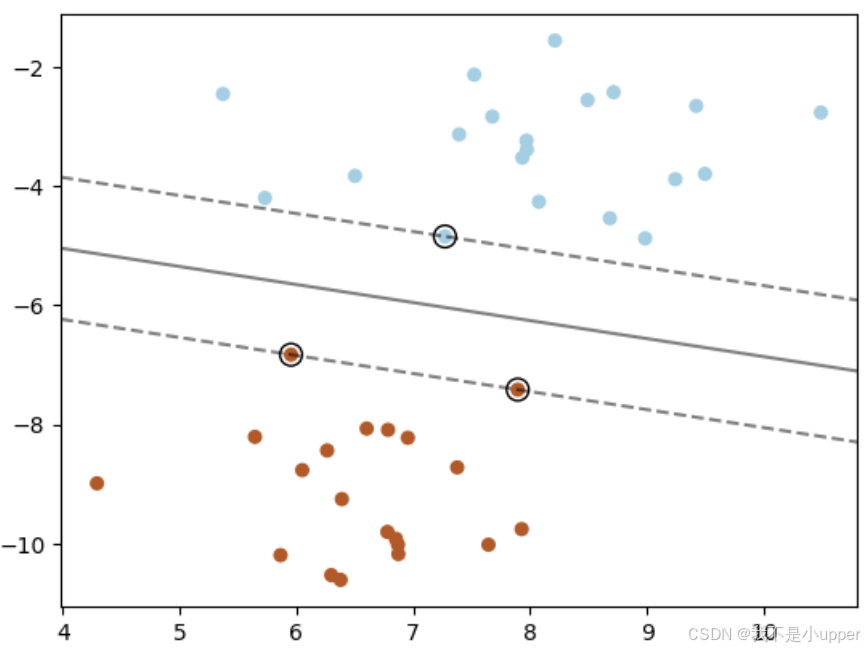
2.1 二维数据决策边界绘制
以下代码基于 sklearn 实现线性 SVM 的决策边界可视化:
import numpy as np
import matplotlib.pyplot as plt
from sklearn import svm
from sklearn.datasets import make_blobs# 创建 2D 数据集
X, y = make_blobs(n_samples=40, centers=2, random_state=6)# 训练 SVM 模型
clf = svm.SVC(kernel='linear', C=1000)
clf.fit(X, y)# 绘制数据点
plt.scatter(X[:, 0], X[:, 1], c=y, s=30, cmap=plt.cm.Paired)# 绘制决策边界
ax = plt.gca()
xlim = ax.get_xlim()
ylim = ax.get_ylim()# 创建网格来评估模型
xx = np.linspace(xlim[0], xlim[1], 30)
yy = np.linspace(ylim[0], ylim[1], 30)
YY, XX = np.meshgrid(yy, xx)
xy = np.vstack([XX.ravel(), YY.ravel()]).T
Z = clf.decision_function(xy).reshape(XX.shape)# 绘制决策边界和边距
ax.contour(XX, YY, Z, colors='k', levels=[-1, 0, 1], alpha=0.5, linestyles=['--', '-', '--'])# 标记支持向量
ax.scatter(clf.support_vectors_[:, 0], clf.support_vectors_[:, 1], s=100, linewidth=1, facecolors='none', edgecolors='k')
plt.show()
关键逻辑:
decision_function返回样本到超平面的有符号距离,通过等高线图可视化决策边界(Z=0)和间隔边界(Z=±1)。- 支持向量为距离超平面最近的样本点,决定了超平面的位置。
2.2 三维超平面与软间隔可视化
对于三维数据,超平面为 ,软间隔允许样本点位于间隔内或错误分类侧。通过调整 C 可控制间隔 “硬度”,但二维代码难以直接扩展至三维,需借助投影或降维技术(如 PCA)间接可视化。
3. 鸢尾花数据集分类项目详解
3.1 数据预处理
from sklearn.datasets import load_iris
from sklearn.preprocessing import StandardScaleriris = load_iris()
# 仅保留后两类数据(类别1和2)及前两个特征(简化为二维分类问题)
X_2d = iris.data[iris.target > 0, :2]
y_2d = iris.target[iris.target > 0] - 1 # 转换为0-1标签
# 标准化:使各特征均值为0、方差为1,避免尺度差异影响模型
scaler = StandardScaler()
X_2d = scaler.fit_transform(X_2d)
技术要点:
- 标准化是 SVM 的关键步骤,因 SVM 依赖样本间的距离计算,特征尺度差异会导致模型偏向大尺度特征。
- 二维化处理便于可视化,但实际应用中需保留更多特征以提升分类精度。
3.2 网格搜索与参数调优
from sklearn.model_selection import GridSearchCV, StratifiedShuffleSplit
from sklearn.svm import SVC# 定义参数网格:C(正则化强度)和gamma(RBF核参数)
C_range = np.logspace(-2, 10, 13) # C从1e-2到1e10,共13个值
gamma_range = np.logspace(-9, 3, 13) # gamma从1e-9到1e3,共13个值
param_grid = {'gamma': gamma_range, 'C': C_range}
# 分层交叉验证:保持类别分布均衡,5折拆分,20%数据用于验证
cv = StratifiedShuffleSplit(n_splits=5, test_size=0.2, random_state=42)
grid = GridSearchCV(SVC(kernel='rbf'), param_grid, cv=cv)
grid.fit(X_2d, y_2d)
参数含义:
- C:控制模型对训练数据的拟合程度,小 C 对应更宽的间隔和更强的正则化。
- gamma:在 RBF 核中,控制单个样本的影响范围。小 gamma 使决策边界更平滑(泛化性强),大 gamma 导致过拟合。
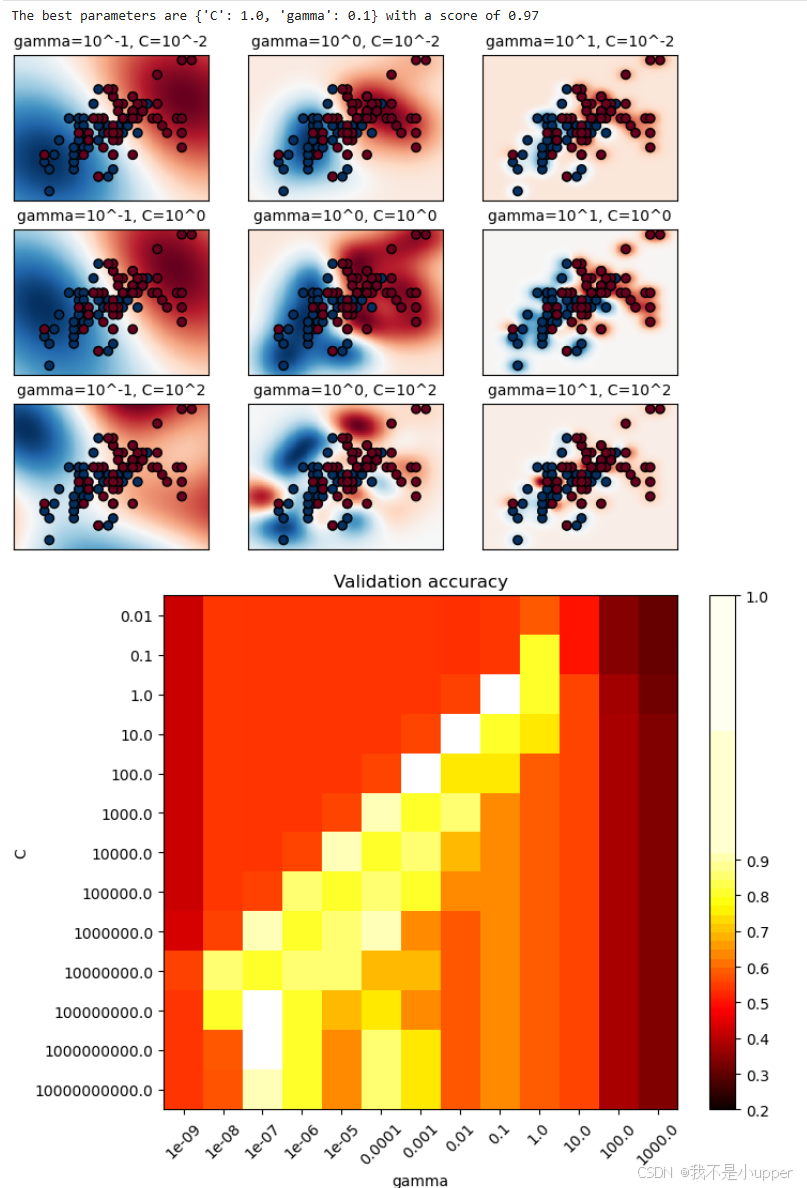
3.3 决策边界与性能可视化
import matplotlib.pyplot as plt
from matplotlib.colors import Normalize# 训练不同参数组合的SVM模型
C_2d_range = [1e-2, 1, 1e2]
gamma_2d_range = [1e-1, 1, 1e1]
classifiers = [(C, gamma, SVC(C=C, gamma=gamma).fit(X_2d, y_2d)) for C in C_2d_range for gamma in gamma_2d_range]# 绘制决策边界子图
plt.figure(figsize=(8, 6))
xx, yy = np.meshgrid(np.linspace(-3, 3, 200), np.linspace(-3, 3, 200))
for k, (C, gamma, clf) in enumerate(classifiers):Z = clf.decision_function(np.c_[xx.ravel(), yy.ravel()]).reshape(xx.shape)plt.subplot(3, 3, k+1)# 绘制决策区域:-Z的色彩映射表示分类置信度plt.pcolormesh(xx, yy, -Z, cmap=plt.cm.RdBu, norm=Normalize(-1, 1))# 绘制样本点:颜色表示类别,黑色边框表示支持向量plt.scatter(X_2d[:, 0], X_2d[:, 1], c=y_2d, cmap=plt.cm.RdBu_r, edgecolors='k')plt.title(f'gamma=10^{np.log10(gamma):.0f}, C=10^{np.log10(C):.0f}')
可视化解读:
- 决策区域:颜色越深表示分类置信度越高,白色区域为分类边界附近(低置信度)。
- 参数影响:
- 当 C 固定时,增大
- 当
- 当 C 固定时,增大
3.4 热图分析参数组合性能
scores = grid.cv_results_['mean_test_score'].reshape(len(C_range), len(gamma_range))
plt.figure(figsize=(8, 6))
# 自定义归一化:中点设为0.92,突出高分数区域
norm = MidpointNormalize(vmin=0.2, midpoint=0.92)
plt.imshow(scores, interpolation='nearest', cmap='hot', norm=norm)
plt.xlabel('gamma (log10 scale)')
plt.ylabel('C (log10 scale)')
plt.colorbar(label='Validation Accuracy')
plt.xticks(np.arange(len(gamma_range)), gamma_range.round(2), rotation=45)
plt.yticks(np.arange(len(C_range)), C_range.round(2))
性能趋势:
- 高分数区域集中在 C 和
,
),表明过强或过弱的正则化均会降低泛化能力。
- 热图可辅助选择最优参数组合,避免手动调参的盲目性。
4. SVM 关键特性总结
- 边际最大化:通过几何间隔最大化提升模型泛化能力,决策仅依赖支持向量,降低对噪声的敏感度。
- 核技巧的本质:将非线性分类问题转化为高维空间的线性问题,核心是核函数的选择与参数调优。
- 正则化机制:参数 C 平衡间隔宽度与分类误差,需通过交叉验证确定最优值。
- 数据依赖性:适用于特征维度高、样本量中等的场景(如文本分类),对大规模数据(百万级样本)需结合近似算法(如 SVMlight)。
此项目通过鸢尾花数据集的实践,系统性展示了 SVM 从理论到实现的完整流程,重点体现了参数对模型行为的定量影响,为复杂场景下的模型调优提供了可复用的方法论。



:Spring Boot + AI + DeepSeek 打造智能成语接龙游戏(附完整源码))

 中创建多级目录或文件,可以使用鸿蒙的文件系统 API】)


单例模式)










