博主介绍:✌全网粉丝50W+,前互联网大厂软件研发、集结硕博英豪成立软件开发工作室,专注于计算机相关专业项目实战6年之久,累计开发项目作品上万套。凭借丰富的经验与专业实力,已帮助成千上万的学生顺利毕业,选择我们,就是选择放心、选择安心毕业✌
> 🍅想要获取完整文章或者源码,或者代做,拉到文章底部即可与我联系了。🍅点击查看作者主页,了解更多项目!
🍅感兴趣的可以先收藏起来,点赞、关注不迷路,大家在毕设选题,项目以及论文编写等相关问题都可以给我留言咨询,希望帮助同学们顺利毕业 。🍅
1、毕业设计:2025年计算机专业毕业设计选题汇总(建议收藏)✅
2、最全计算机专业毕业设计选题大全(建议收藏)✅
1、项目介绍
技术栈:Python语言、YOLOv8、深度学习模型、PySide图形界面、智慧交通、车流实时检测系统
智慧交通车流实时检测系统-深度学习
2、项目界面
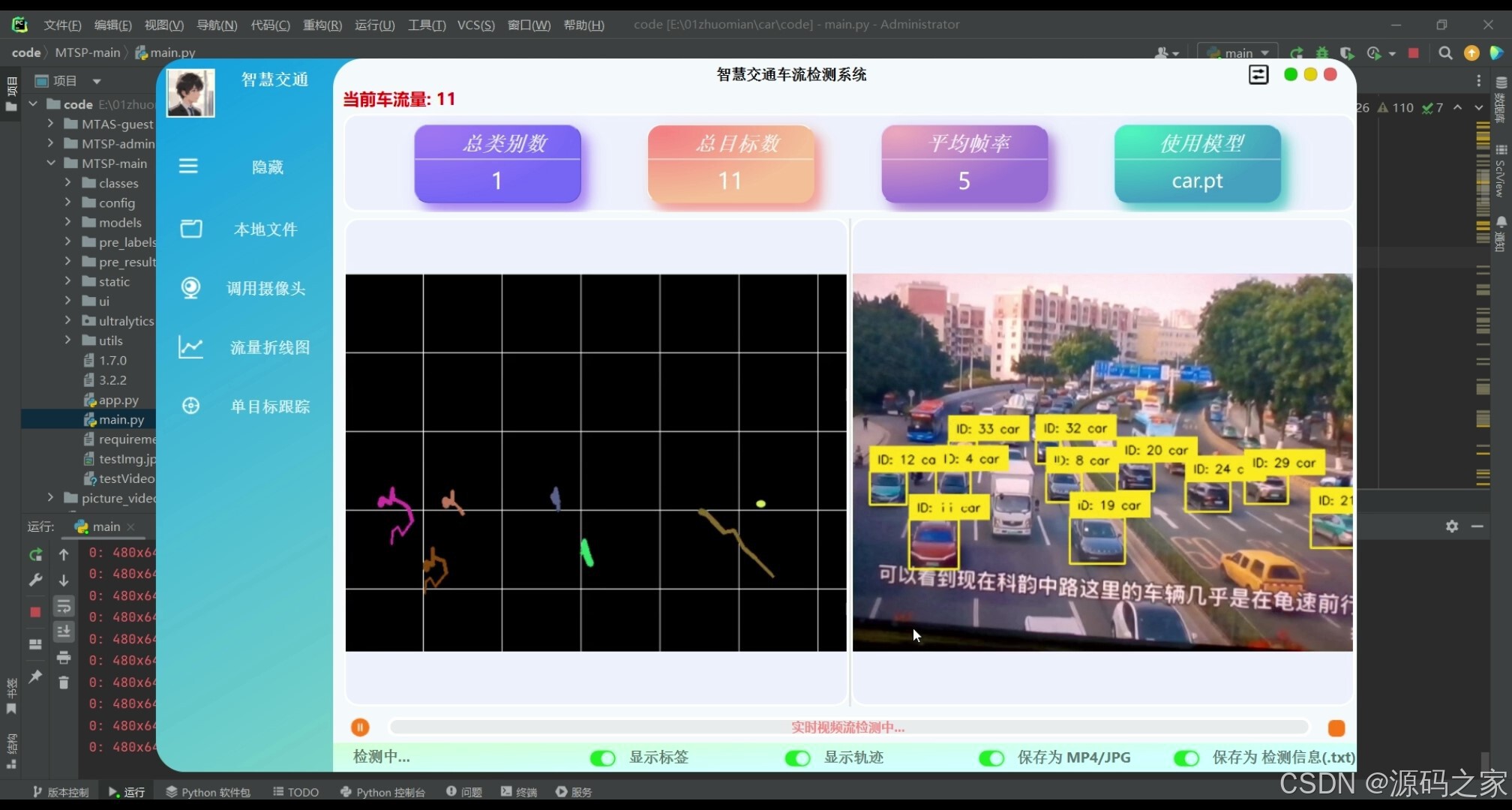
(1)车流量实时检测监控,实时流量检测折线图

(2)车流量轨迹实时跟踪
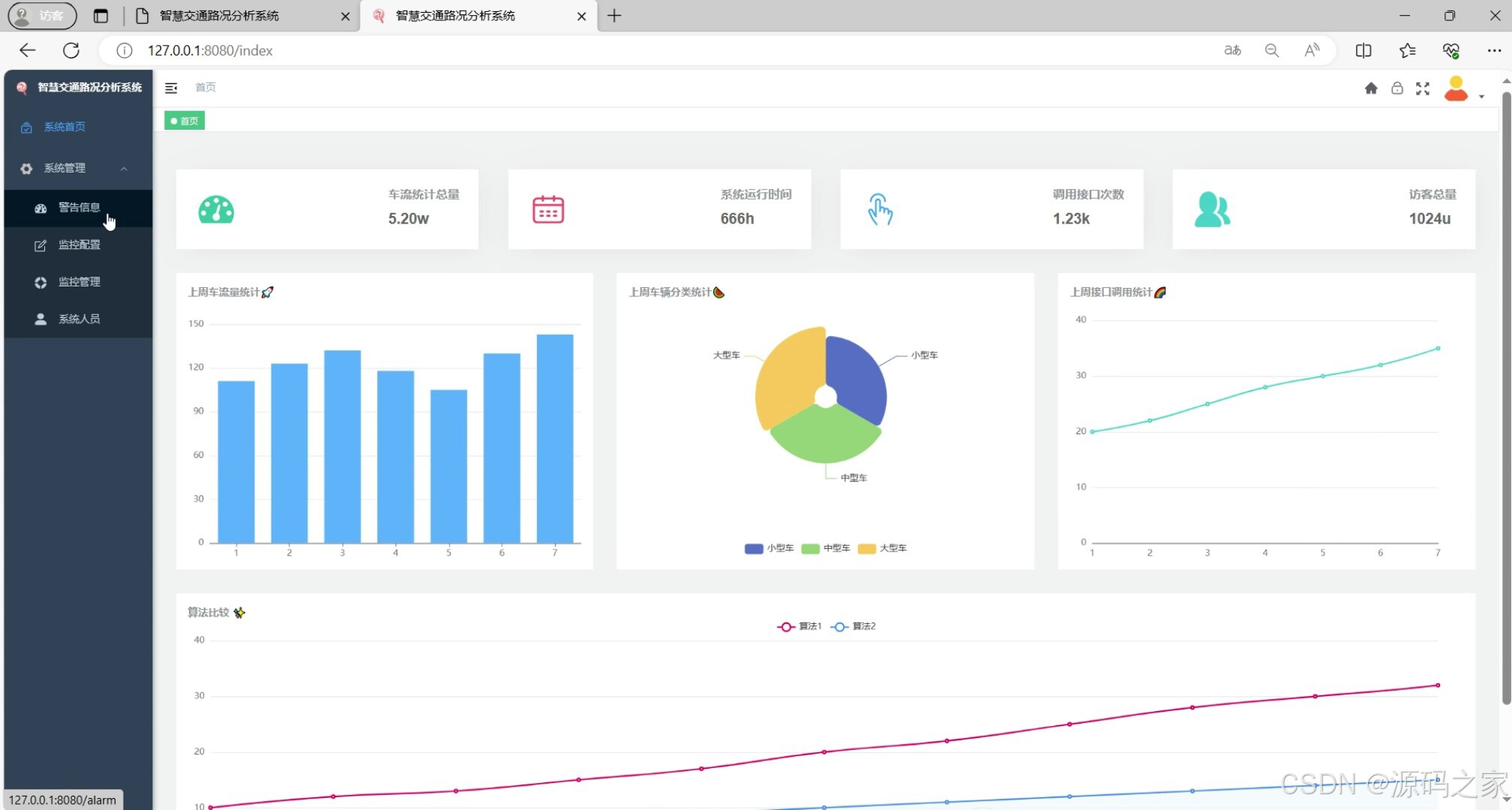
(3)数据监控大屏,大屏数据展示
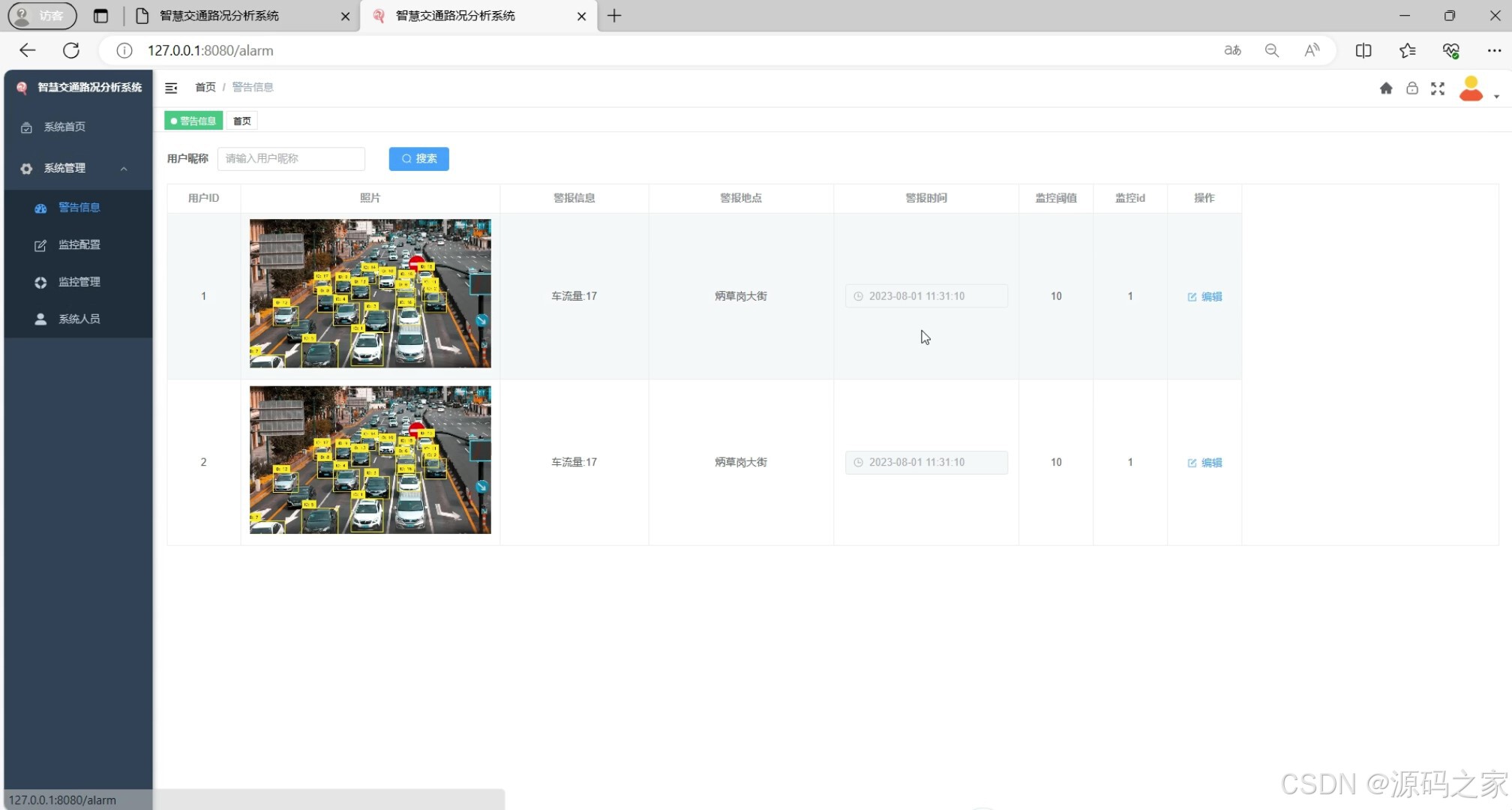
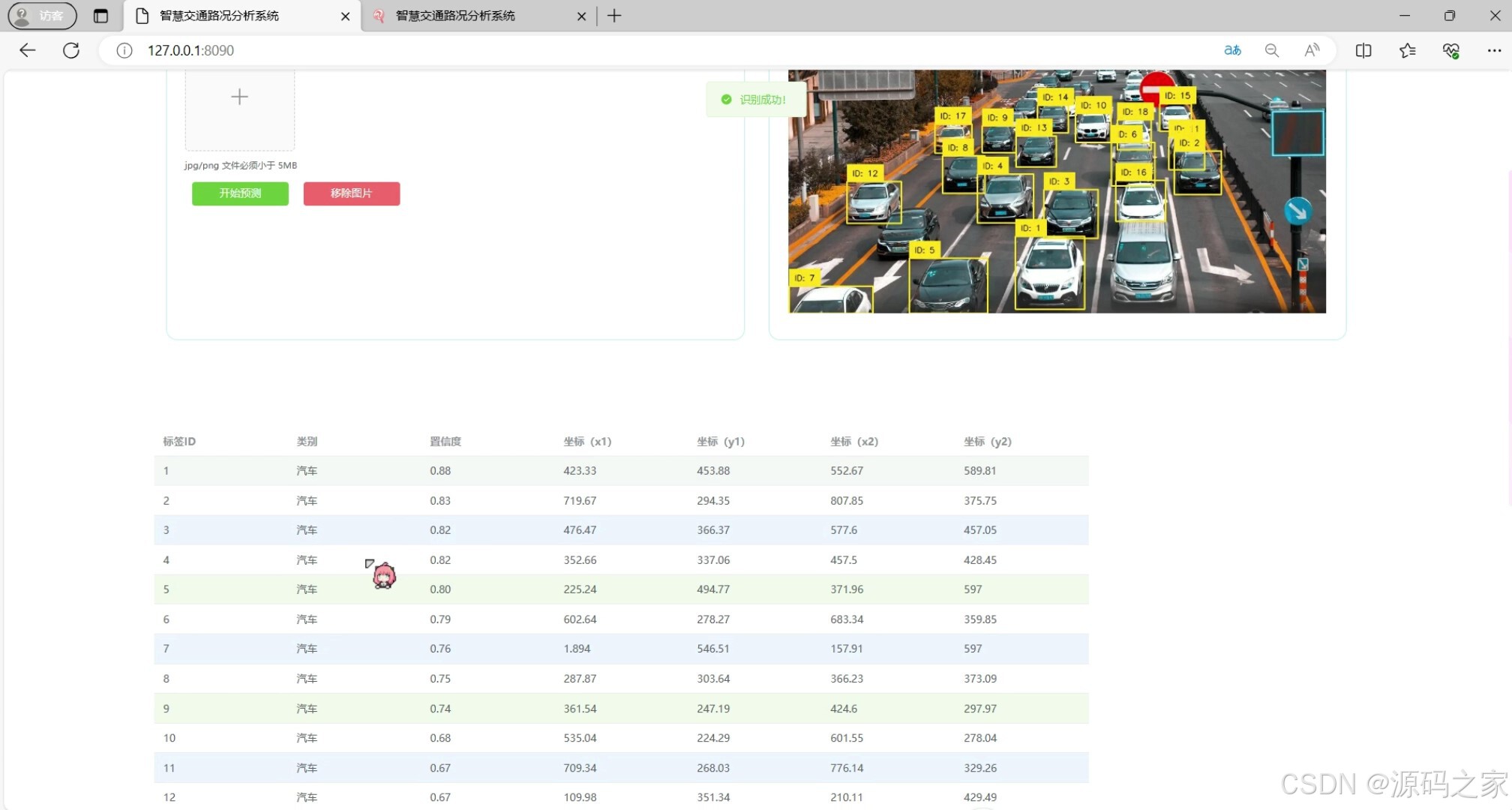
(4)车流量检测识别记录
(5)车流量检测识别2
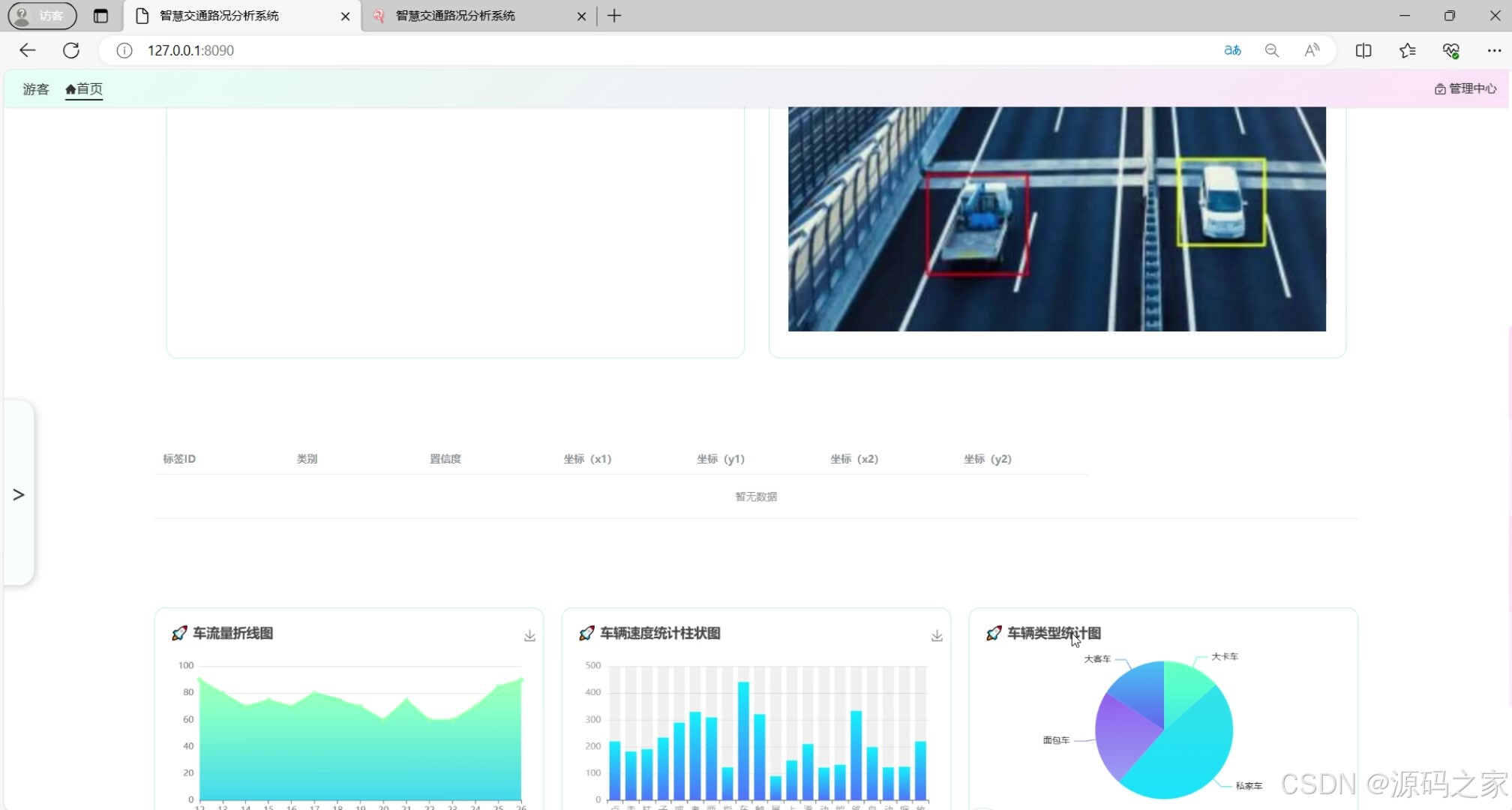
(6)检测识别结果
(7)登录界面
3、项目说明
技术栈:Python语言、YOLOv8、深度学习模型、PySide图形界面、智慧交通、车流实时检测系统
智慧交通车流实时检测系统-深度学习
(一)基本内容
智慧交通车流量检测系统是针对城市交通管理和规划而开发的一种技术应用。随着城市化进程的加快,城市交通问题日益突出,如交通拥堵、交通事故频发等。为了解决这些问题,智慧交通系统应运而生。车流量检测是智慧交通系统的一个重要组成部分。通过对交通流的实时监测和分析,可以及时发现交通拥堵、交通事故等问题,并采取相应的措施进行调整和处理。
YOLOv8算法是一种目标检测算法,能够快速高效地对图像中的物体进行检测和识别。在智慧交通车流量检测系统中,可以利用YOLOv8算法对交通流中的车辆进行实时检测和计数,从而获取车流量的信息。Python语言是一种简单易学、功能强大的编程语言,具有丰富的第三方库和工具,适合进行数据处理和算法实现。在智慧交通车流量检测系统中,可以使用Python语言编写相关的算法和程序,实现对车流量的检测和统计。PySide图形界面是Python的一个GUI开发框架,可以实现用户友好的交互界面。在智慧交通车流量检测系统中,可以使用PySide框架搭建用户界面,方便用户进行系统的配置和操作。
智慧交通车流量检测系统的研究背景是基于城市交通管理和规划的需求,利用先进的信息技术和算法,对交通流进行实时监测和管理,以提高交通效率和安全性。技术栈包括Python语言、YOLOv8算法、PySide图形界面等。
(二)拟解决的主要问题
智慧交通车流量检测系统的研究背景是基于城市交通管理和规划的需求,利用先进的信息技术和算法,对交通流进行实时监测和管理,以提高交通效率和安全性。技术栈包括Python语言、YOLOv8算法、PySide图形界面等。
4、核心代码
# -*- coding: utf-8 -*-# @Description : python main.pyfrom PySide6.QtWidgets import QApplication, QMainWindow, QFileDialog, QMenu
from PySide6.QtGui import QImage, QPixmap, QColor,QCursor
from PySide6.QtCore import QTimer, QThread, Signal, QObject, Qtfrom ui.main_window import Ui_MainWindow
from ui.pop.pop_box import MessageBox
from ui.ui_function import *
from ui.toast.toast import DialogOver
from ui.dialog.rtsp_win import Window
from ui.dialog.id_win import id_Windowfrom utils.main_utils import check_url, check_path
from utils.AtestCamera import Camera
from classes.yolo import YoloPredictor
from classes.main_config import MainConfig
from classes.car_chart import WorkerThreadfrom PIL import Image
import numpy as np
import supervision as sv
import subprocess
import sys
import cv2
import os
import datetimeclass MainWindow(QMainWindow, Ui_MainWindow):# 主窗口向yolo实例发送执行信号main2yolo_begin_sgl = Signal()def __init__(self, parent=None):super(MainWindow, self).__init__()self.setupUi(self)# 背景设置为半透明 & 无边框窗口self.setAttribute(Qt.WA_TranslucentBackground) self.setWindowFlags(Qt.FramelessWindowHint)# UI动作(动效)UIFuncitons.uiDefinitions(self)# 变量设置self.car_threshold = 0 # 车辆阈值self.web_flag = True # 可以开启self.server_process = None # 服务器进程self.image_id = 0 # 图片 idself.txt_id = 0 # 标签 id# 设置阴影UIFuncitons.shadow_style(self, self.Class_QF, QColor(162,129,247))UIFuncitons.shadow_style(self, self.Target_QF, QColor(251, 157, 139))UIFuncitons.shadow_style(self, self.Fps_QF, QColor(170, 128, 213))UIFuncitons.shadow_style(self, self.Model_QF, QColor(64, 186, 193))# 设置 为 -- (好看)self.Class_num.setText('--')self.Target_num.setText('--')self.fps_label.setText('--')# 计时器:每2秒监视模型文件更改一次self.Qtimer_ModelBox = QTimer(self)self.Qtimer_ModelBox.timeout.connect(self.ModelBoxRefre)self.Qtimer_ModelBox.start(2000)self.yolo_init() # 实例化YOLOself.model_bind() # 预测参数-数值变动绑定 主页面# 主要功能绑定 @@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@self.main_function_bind()self.load_config() # 配置加载self.model_load() # 模型加载# 画图线程self.is_draw_thread = Falseself.draw_thread = WorkerThread()self.show_status('欢迎使用智能车流分析系统!')# 实例化YOLOdef yolo_init(self):# Yolo-v8 threadself.yolo_predict = YoloPredictor() #实例化yolo检测self.select_model = self.model_box.currentText()self.yolo_thread = QThread()# 显示预测视频(左,右)self.yolo_predict.yolo2main_trail_img.connect(lambda x: self.show_image(x, self.pre_video))self.yolo_predict.yolo2main_box_img.connect(lambda x: self.show_image(x, self.res_video))# 输出信息、FPS、类数、总数self.yolo_predict.yolo2main_status_msg.connect(lambda x: self.show_status(x))self.yolo_predict.yolo2main_fps.connect(lambda x: self.fps_label.setText(x))self.yolo_predict.yolo2main_class_num.connect(lambda x:self.Class_num.setText(str(x)))self.yolo_predict.yolo2main_progress.connect(lambda x: self.progress_bar.setValue(x))# 移动线程里面去(通过main2yolo_begin_sgl信号控制-先要开启yolo_thread线程,才能启动yolo_predict的run方法)self.yolo_predict.moveToThread(self.yolo_thread)self.main2yolo_begin_sgl.connect(self.yolo_predict.run)# 显示总车流量self.yolo_predict.yolo2main_target_num.connect(lambda x:self.Target_setText(x))# 模型加载def model_load(self):# 创建模型文件夹check_path(self.config.models_path)self.model_box.clear()self.pt_list = os.listdir(f'./{self.config.models_path}')self.pt_list = [file for file in self.pt_list if file.endswith('.pt') or file.endswith('.engine')]self.pt_list.sort(key=lambda x: os.path.getsize(f'./{self.config.models_path}/' + x)) #按文件大小排序self.model_box.clear()self.model_box.addItems(self.pt_list)# 主页面各功能绑定def main_function_bind(self):self.src_file_button.clicked.connect(self.open_src_file) # 打开文件夹self.src_cam_button.clicked.connect(self.camera_select) # 摄像头# self.src_rtsp_button.clicked.connect(self.rtsp_seletction) # RTPSself.src_graph_button.clicked.connect(self.show_traffic_graph) # 流量图self.src_lock_button.clicked.connect(self.lock_id_selection) # 单目追踪# self.src_web_button.clicked.connect(self.web_back_end) # 后端开启与关闭self.run_button.clicked.connect(self.run_or_continue) # 开始self.stop_button.clicked.connect(self.stop) # 终止self.save_res_button.toggled.connect(self.is_save_res) # 是否 保存 视频self.save_txt_button.toggled.connect(self.is_save_txt) # 是否 保存 标签self.show_labels_checkbox.toggled.connect(self.is_show_labels) # 是否 显示标签self.show_trace_checkbox.toggled.connect(self.is_show_trace) # 是否 显示轨迹self.ToggleBotton.clicked.connect(lambda: UIFuncitons.toggleMenu(self, True))self.settings_button.clicked.connect(lambda: UIFuncitons.settingBox(self, True))# 模型参数绑定def model_bind(self):self.model_box.currentTextChanged.connect(self.change_model)self.iou_spinbox.valueChanged.connect(lambda x:self.change_val(x, 'iou_spinbox')) # iou boxself.iou_slider.valueChanged.connect(lambda x:self.change_val(x, 'iou_slider')) # iou scroll barself.conf_spinbox.valueChanged.connect(lambda x:self.change_val(x, 'conf_spinbox')) # conf boxself.conf_slider.valueChanged.connect(lambda x:self.change_val(x, 'conf_slider')) # conf scroll barself.speed_spinbox.valueChanged.connect(lambda x:self.change_val(x, 'speed_spinbox'))# speed boxself.speed_slider.valueChanged.connect(lambda x:self.change_val(x, 'speed_slider')) # speed scroll barself.speed_sss.valueChanged.connect(lambda x: self.change_val(x, 'speed_sss')) # speed boxself.speed_nnn.valueChanged.connect(lambda x:self.change_val(x, 'speed_nnn')) # speed scroll bar# JSON配置文件初始化def load_config(self):self.config = MainConfig("./config/config.json")self.save_res_button.setChecked(self.config.save_res)self.save_txt_button.setChecked(self.config.save_txt)self.iou_slider.setValue(self.config.iou * 100)self.conf_slider.setValue(self.config.conf * 100)self.speed_slider.setValue(self.config.rate)self.speed_sss.setValue(self.config.car_threshold)self.yolo_predict.save_txt = self.config.save_txt # 保存标签self.yolo_predict.save_res = self.config.save_res # 保存结果self.yolo_predict.save_txt_path = self.config.save_txt_pathself.yolo_predict.save_res_path = self.config.save_res_pathself.yolo_predict.new_model_name = f"./{self.config.models_path}/%s" % self.select_modelself.yolo_predict.show_trace = self.config.show_trace # 轨迹self.show_trace_checkbox.setChecked(self.config.show_trace) # 轨迹self.yolo_predict.show_labels = self.config.show_labels # 标签self.show_labels_checkbox.setChecked(self.config.show_labels) # 标签self.open_fold = self.config.open_foldself.rtsp_ip = self.config.rtsp_ipself.car_id = self.config.car_idself.run_button.setChecked(False)# 如果超出了车流阈值,那么就变红!!def Target_setText(self, num):num = str(num)self.Target_num.setText(num)self.char_label.setText(f"当前车流量: {num}")if (int(num) > int(self.car_threshold)):self.char_label.setStyleSheet("color: red;")else:self.char_label.setStyleSheet("color: green;")#主窗口显示轨迹图像和检测图像 (缩放在这里)@staticmethoddef show_image(img_src, label):try:# 检查图像的通道数,确定图像是否为彩色图像if len(img_src.shape) == 3:ih, iw, _ = img_src.shapeif len(img_src.shape) == 2:ih, iw = img_src.shape# 根据标签窗口的大小调整图像的大小w = label.geometry().width()h = label.geometry().height()# 根据图像宽高比例进行缩放if iw / w > ih / h:scal = w / iwnw = wnh = int(scal * ih)img_src_ = cv2.resize(img_src, (nw, nh))else:scal = h / ihnw = int(scal * iw)nh = himg_src_ = cv2.resize(img_src, (nw, nh))# 将OpenCV图像从BGR格式转换为RGB格式,并创建QImage对象frame = cv2.cvtColor(img_src_, cv2.COLOR_BGR2RGB)img = QImage(frame.data, frame.shape[1], frame.shape[0], frame.shape[2] * frame.shape[1],QImage.Format_RGB888)# 在标签窗口中显示图像label.setPixmap(QPixmap.fromImage(img))except Exception as e:print(repr(e))#控制开始|暂停def run_or_continue(self):# 检测是否有模型if self.yolo_predict.new_model_name == '' or self.yolo_predict.new_model_name == None:DialogOver(parent=self, text="请检测模型", title="运行失败", flags="danger")self.run_button.setChecked(False)return# 检测输入源if self.yolo_predict.source == '' or self.yolo_predict.source == None:self.show_status('请在检测前选择输入源...')self.run_button.setChecked(False)DialogOver(parent=self, text="请检测输入源", title="运行失败", flags="danger")returnself.yolo_predict.stop_dtc = False # 线程开始# 开始if self.run_button.isChecked():# 图片预测file_extension = self.yolo_predict.source[-3:].lower()if file_extension == 'png' or file_extension == 'jpg':self.img_predict()return# 视频预测DialogOver(parent=self, text="开始检测...", title="运行成功", flags="success")self.run_button.setChecked(True)self.draw_thread.run_continue() # 折线图开始# 不可再改变设置(config动态调整 关闭)self.save_txt_button.setEnabled(False)self.save_res_button.setEnabled(False)self.conf_slider.setEnabled(False)self.iou_slider.setEnabled(False)self.speed_slider.setEnabled(False)self.show_status('检测中...')if '0' in self.yolo_predict.source or 'rtsp' in self.yolo_predict.source:self.progress_bar.setFormat('实时视频流检测中...')if 'avi' in self.yolo_predict.source or 'mp4' in self.yolo_predict.source:self.progress_bar.setFormat("当前检测进度:%p%")self.yolo_predict.continue_dtc = True# 开始检测if not self.yolo_thread.isRunning():self.yolo_thread.start()self.main2yolo_begin_sgl.emit()# 暂停else:self.draw_thread.pause() # 折线图暂停self.yolo_predict.continue_dtc = Falseself.show_status("暂停...")DialogOver(parent=self, text="已暂停检测", title="运行暂停", flags="warning")self.run_button.setChecked(False)# 显示状态 (底部栏def show_status(self, msg):self.status_bar.setText(msg) # 显示输出if msg == '检测完成':self.save_res_button.setEnabled(True)self.save_txt_button.setEnabled(True)self.run_button.setChecked(False) self.progress_bar.setValue(0)# 终止yolo线程if self.yolo_thread.isRunning():self.yolo_thread.quit()# 修改画图线程状态self.draw_thread.stop()self.is_draw_thread = Falseelif msg == '检测终止':self.save_res_button.setEnabled(True)self.save_txt_button.setEnabled(True)self.run_button.setChecked(False) self.progress_bar.setValue(0)# 终止yolo线程if self.yolo_thread.isRunning():self.yolo_thread.quit()# 修改画图线程状态self.draw_thread.stop()self.is_draw_thread = Falseself.pre_video.clear() self.res_video.clear() self.Class_num.setText('--')self.Target_num.setText('--')self.fps_label.setText('--')# 打开文件def open_src_file(self):name, _ = QFileDialog.getOpenFileName(self, 'Video/image', self.open_fold, "Pic File(*.mp4 *.mkv *.avi *.flv *.jpg *.png)")if name:self.yolo_predict.source = nameself.show_status('加载文件:{}'.format(os.path.basename(name)))self.open_fold = os.path.dirname(name)# 终止事件self.stop()DialogOver(parent=self, text=f"文件路径: {name}", title="加载成功", flags="success")# camera选择def camera_select(self):#try:# 关闭YOLO线程self.stop()#获取本地摄像头数量_, cams = Camera().get_cam_num()popMenu = QMenu()popMenu.setFixedWidth(self.src_cam_button.width())popMenu.setStyleSheet('''QMenu {font-size: 20px;font-family: "Microsoft YaHei UI";font-weight: light;color:white;padding-left: 5px;padding-right: 5px;padding-top: 4px;padding-bottom: 4px;border-style: solid;border-width: 0px;border-color: rgba(255, 212, 255, 255);border-radius: 3px;background-color: rgba(16,155,226,50);}''')for cam in cams:exec("action_%s = QAction('%s 号摄像头')" % (cam, cam))exec("popMenu.addAction(action_%s)" % cam)pos = QCursor.pos()action = popMenu.exec(pos)# 设置摄像头来源if action:str_temp = ''selected_stream_source = str_temp.join(filter(str.isdigit, action.text())) #获取摄像头号,去除非数字字符self.yolo_predict.source = selected_stream_sourceself.show_status(f'摄像头设备:{action.text()}')DialogOver(parent=self, text=f"当前摄像头为: {action.text()}", title="摄像头选择成功", flags="success")# 1、选择rtspdef rtsp_seletction(self):self.rtsp_window = Window()self.rtsp_window.rtspEdit.setText(self.rtsp_ip)self.rtsp_window.show()# 如果点击则加载RTSPself.rtsp_window.rtspButton.clicked.connect(lambda: self.load_rtsp(self.rtsp_window.rtspEdit.text()))# 2、加载RTSPdef load_rtsp(self, ip):MessageBox(self.close_button, title='提示', text='加载 rtsp...', time=1000, auto=True).exec()self.stop() # 关闭YOLO线程self.yolo_predict.source = ipself.rtsp_ip = ip # 写会ipself.rtsp_window.close()#状态显示self.show_status(f'加载rtsp地址:{ip}')DialogOver(parent=self, text=f"rtsp地址为: {ip}", title="RTSP加载成功", flags="success")# 1、设置 单目标def lock_id_selection(self):self.yolo_predict.lock_id = Noneself.id_window = id_Window()self.id_window.idEdit.setText(str(self.car_id))self.id_window.show()self.id_window.idButton.clicked.connect(lambda: self.set_lock_id(self.id_window.idEdit.text()))# 2、设置 单目标 IDdef set_lock_id(self,lock_id):self.yolo_predict.lock_id = Noneself.yolo_predict.lock_id = lock_idself.car_id = lock_id # 写回lock_idself.show_status('加载ID:{}'.format(lock_id))self.id_window.close()#加载流量折线图def show_traffic_graph(self):# 没有开始检测if not self.run_button.isChecked():DialogOver(parent=self, text="请先开始目标检测!", title="开启失败", flags="danger")return# 避免重复开启if self.is_draw_thread:DialogOver(parent=self, text="流量图已经开启啦!", title="不能重复开启", flags="danger")returnself.draw_thread.start()self.is_draw_thread = True# 开启Web后端def web_back_end(self):# 终止事件self.stop()base_dir = os.path.dirname(os.path.abspath(__file__))flask_app_path = os.path.join(base_dir, 'app.py')# True是可以开启# if (self.web_flag):# self.server_process = subprocess.Popen(['python', flask_app_path])# MessageBox(self.close_button, title='提示', text='正在开启网页端...', time=2000, auto=True).exec()## # 检查子进程是否启动# try:# if self.server_process.pid is not None:# self.src_web_button.setText("关闭网页端")# self.web_flag = False# DialogOver(parent=self, text="网页端已开启", title="开启成功", flags="success")# except Exception as e:# DialogOver(parent=self, text=str(e), title="开启失败", flags="danger")### # False是关闭后端# else:# try:# self.server_process.terminate()# MessageBox(self.close_button, title='提示', text='正在关闭网页端...', time=2000, auto=True).exec()## self.src_web_button.setText("开启网页端")# self.web_flag = True# DialogOver(parent=self, text="网页端已关闭", title="关闭成功", flags="success")# except Exception as e:# DialogOver(parent=self, text=str(e), title="关闭失败", flags="danger")#保存提示(MP4)def is_save_res(self):if self.save_res_button.checkState() == Qt.CheckState.Unchecked:self.show_status('提示: 监测结果不会被保存')self.yolo_predict.save_res = Falseelif self.save_res_button.checkState() == Qt.CheckState.Checked:self.show_status('提示: 监测结果将会被保存')self.yolo_predict.save_res = True#保存提示(txt)def is_save_txt(self):if self.save_txt_button.checkState() == Qt.CheckState.Unchecked:self.show_status('提示: 标签信息不会被保存')self.yolo_predict.save_txt = Falseelif self.save_txt_button.checkState() == Qt.CheckState.Checked:self.show_status('提示: 标签信息将会被保存')self.yolo_predict.save_txt = True# 是否显示 标签def is_show_labels(self):if self.show_labels_checkbox.checkState() == Qt.CheckState.Unchecked:self.yolo_predict.show_labels = Falseself.show_status('提示: 不再显示标签')elif self.show_labels_checkbox.checkState() == Qt.CheckState.Checked:self.yolo_predict.show_labels = Trueself.show_status('提示: 显示标签')# 是否显示 轨迹def is_show_trace(self):if self.show_trace_checkbox.checkState() == Qt.CheckState.Unchecked:self.yolo_predict.show_trace = Falseself.show_status('提示: 不再显示轨迹')elif self.show_trace_checkbox.checkState() == Qt.CheckState.Checked:self.yolo_predict.show_trace = Trueself.show_status('提示: 显示轨迹')#终止事件(按下终止按钮 or 输入源更换的时候)def stop(self):try:# 摄像头释放self.yolo_predict.release_capture() # 这里是为了终止使用摄像头检测函数的线程,改了yolo源码# 结束线程self.yolo_thread.quit()except:passself.yolo_predict.stop_dtc = Trueself.run_button.setChecked(False) #恢复按钮状态# 终止后才可以修改设置self.save_res_button.setEnabled(True) #把保存按钮设置为可用self.save_txt_button.setEnabled(True) #把保存按钮设置为可用self.iou_slider.setEnabled(True) #把滑块设置为可用self.conf_slider.setEnabled(True) #把滑块设置为可用self.speed_slider.setEnabled(True) #把滑块设置为可用self.pre_video.clear() #清空视频显示self.res_video.clear() #清空视频显示self.progress_bar.setValue(0) #进度条清零self.Class_num.setText('--')self.Target_num.setText('--')self.fps_label.setText('--')#检测参数设置def change_val(self, x, flag):# 交互比if flag == 'iou_spinbox':self.iou_slider.setValue(int(x*100)) elif flag == 'iou_slider':self.iou_spinbox.setValue(x/100) self.show_status('IOU Threshold: %s' % str(x/100))self.yolo_predict.iou_thres = x/100# 置信度elif flag == 'conf_spinbox':self.conf_slider.setValue(int(x*100))elif flag == 'conf_slider':self.conf_spinbox.setValue(x/100)self.show_status('Conf Threshold: %s' % str(x/100))self.yolo_predict.conf_thres = x/100# 延时elif flag == 'speed_spinbox':self.speed_slider.setValue(x)elif flag == 'speed_slider':self.speed_spinbox.setValue(x)self.show_status('Delay: %s ms' % str(x))self.yolo_predict.speed_thres = x # ms# 车辆数预测警报elif flag == 'speed_nnn':self.speed_sss.setValue(x)elif flag == 'speed_sss':self.speed_nnn.setValue(x)self.show_status('流量阈值设置: %s 辆' % str(x))self.car_threshold = x # ms#模型更换def change_model(self,x):self.select_model = self.model_box.currentText()self.yolo_predict.new_model_name = f"./{self.config.models_path}/%s" % self.select_modelself.show_status('更改模型:%s' % self.select_model)self.Model_name.setText(self.select_model)#循环监测文件夹的文件变化def ModelBoxRefre(self):pt_list = os.listdir(f'./{self.config.models_path}')pt_list = [file for file in pt_list if file.endswith('.pt') or file.endswith('.engine')]pt_list.sort(key=lambda x: os.path.getsize(f'./{self.config.models_path}/' + x))#必须排序后再比较,否则列表会一直刷新if pt_list != self.pt_list:self.pt_list = pt_listself.model_box.clear()self.model_box.addItems(self.pt_list)#获取鼠标位置(用于按住标题栏拖动窗口)def mousePressEvent(self, event):p = event.globalPosition()globalPos = p.toPoint()self.dragPos = globalPos#拖动窗口大小时优化调整def resizeEvent(self, event):# Update Size GripsUIFuncitons.resize_grips(self)# 退出时退出线程,保存设置def closeEvent(self, event):try:self.stop()# 检测画图线程self.draw_thread.close_exec()# self.draw_thread.deleteLater()# config.jsonself.config.save_res = self.yolo_predict.save_resself.config.save_txt = self.yolo_predict.save_txtself.config.show_labels = self.yolo_predict.show_labelsself.config.show_trace = self.yolo_predict.show_traceself.config.iou = self.yolo_predict.iou_thresself.config.conf = self.yolo_predict.conf_thresself.config.rate = self.yolo_predict.speed_thresself.config.car_threshold = self.car_threshold # 车辆警报 阈值self.config.rtsp_ip = self.rtsp_ipself.config.car_id = self.car_idself.config.open_fold = self.open_foldself.config.save_config() # 保存设置# 退出弹窗 2sMessageBox(self.close_button, title='Note', text='退出中,请等待...', time=2000, auto=True).exec()# 检查服务器进程是否启动if self.server_process is not None:if self.server_process.pid is not None:self.server_process.terminate() # 服务器进程关闭sys.exit(0)except Exception as e:print(e)sys.exit(0)# 预测图片def img_predict(self):if check_url(self.yolo_predict.source):DialogOver(parent=self, text="目标路径含有中文!", title="程序取消", flags="danger")returnself.run_button.setChecked(False) # 按钮# 读取照片image = cv2.imread(self.yolo_predict.source)org_img = image.copy()# 加载模型model = self.yolo_predict.load_yolo_model()# 获取数据源iter_model = iter(model.track(source=image, show=False))result = next(iter_model) # 这里是检测的核心,# 如果没有目标if result.boxes.id is None:DialogOver(parent=self, text="该图片中没有要检测的目标哟!", title="运行完成", flags="warning")self.show_image(image, self.pre_video)self.show_image(image, self.res_video)self.yolo_predict.source = ''return# 如果有目标detections = sv.Detections.from_yolov8(result)detections.tracker_id = result.boxes.id.cpu().numpy().astype(int)# 画标签labels_write, img_box = self.yolo_predict.creat_labels(detections, image, model)# 显示信息 —— 类别数 & 总数self.Class_num.setText(str(self.yolo_predict.get_class_number(detections)))self.Target_num.setText(str(len(detections.tracker_id)))# 显示图片self.show_image(org_img, self.pre_video) # leftself.show_image(img_box, self.res_video) # rightself.yolo_predict.source = ''DialogOver(parent=self, text="图片检测完成", title="运行成功", flags="success")# 保存图片if self.yolo_predict.save_res:check_path(self.config.save_res_path) # 检查保存路径# 存在同名文件,自增 self.image_id 直至文件不存在while os.path.exists(f"{self.config.save_res_path}/image_result_{self.image_id}.jpg"):self.image_id += 1# 将 BGR 格式的 frame 转换为 RGB 格式rgb_frame = cv2.cvtColor(img_box, cv2.COLOR_BGR2RGB)# 把 rgb_frame 转换为 numpy格式 就行了numpy_frame = np.array(rgb_frame)Image.fromarray(numpy_frame).save(f"./{self.config.save_res_path}/image_result_{self.image_id}.jpg")# 存储labels里的信息if self.yolo_predict.save_txt:check_path(self.config.save_txt_path) # 检查保存路径# 存在同名文件,自增 self.txt_id 直至文件不存在while os.path.exists(f"{self.config.save_txt_path}/result_{self.txt_id}.jpg"):self.txt_id += 1with open(f'{self.config.save_txt_path}/result_{self.txt_id}.txt', 'a') as f:f.write('当前时刻屏幕信息:' +str(labels_write) +f'检测时间: {datetime.datetime.now().strftime("%Y-%m-%d-%H:%M:%S")}' +f' 路段通过的目标总数: {len(detections.tracker_id)}')f.write('\n')returnif __name__ == "__main__":app = QApplication(sys.argv)Home = MainWindow()Home.show()sys.exit(app.exec())
🍅✌感兴趣的可以先收藏起来,点赞关注不迷路,想学习更多项目可以查看主页,大家在毕设选题,项目编程以及论文编写等相关问题都可以给我留言咨询,希望可以帮助同学们顺利毕业!🍅✌
5、源码获取方式
🍅由于篇幅限制,获取完整文章或源码、代做项目的,拉到文章底部即可看到个人联系方式。🍅
点赞、收藏、关注,不迷路,下方查看👇🏻获取联系方式👇🏻
保姆级教学)




)





)
---ERROR 1040(00000):Too many connections)
:大模型强化学习的高效进化)





