掌握数字世界的律动:时域离散信号与系统基础
想象一下,你用手机拍了一张照片,或者听了一首MP3歌曲。这些图片和声音,原本都是连续变化的模拟信号,但为什么它们能被你的手机存储和处理呢?秘密就在于“数字化”。在这个过程中,“时域离散信号”和“时域离散系统”扮演了主角。
简单来说,时域离散信号就是“打散”了的信号,它只在特定的、不连续的时间点上有值;而时域离散系统,就是处理这些“打散”信号的机器或算法。理解它们,是推开数字信号处理大门的第一步。
走进数字世界:离散时间信号 (序列)
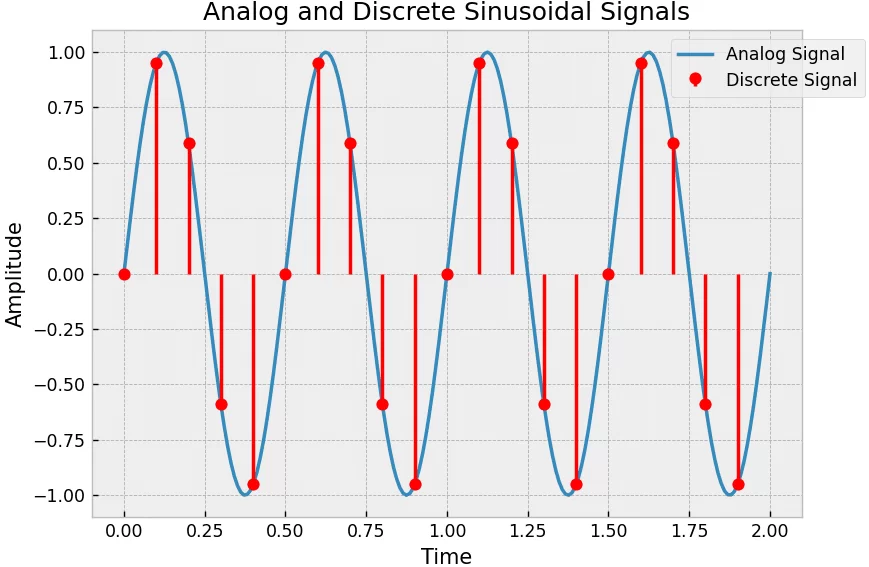
在模拟世界里,信号是连续的,就像一条平滑的曲线,在任何一个时间点上你都能找到它的值。但在数字世界里,我们无法处理无限多的信息,所以必须对信号进行“抽样”,只在特定的时间点上进行测量。这些测量得到的、按照时间顺序排列的数值,就构成了离散时间信号,在DSP中,我们更常用一个更专业的词——序列(Sequence) 来称呼它。
什么是离散时间信号?
一个离散时间信号,通常用 x ( n ) x(n) x(n) 来表示,其中 n n n 是一个整数,代表了时间点。比如,当你每隔一秒测量一次房间的温度,你得到的就是一个离散时间信号: T ( 0 ) T(0) T(0), T ( 1 ) T(1) T(1), T ( 2 ) T(2) T(2), …,这里的 T ( n ) T(n) T(n) 就是在第 n n n 秒测得的温度值。
与模拟信号 x a ( t ) x_a(t) xa(t) 不同, x ( n ) x(n) x(n) 不在任意时间 t t t 上有值,它只在离散的整数时间点 n n n 上有定义。
表示方法:
-
集合法: 直接列出序列中所有有值的点及其对应的取值。
例如: x ( n ) = { . . . , x ( − 1 ) , x ( 0 ) , x ( 1 ) , x ( 2 ) , . . . } x(n) = \{..., x(-1), x(0), x(1), x(2), ...\} x(n)={...,x(−1),x(0),x(1),x(2),...}。
当序列只在有限个点有值时,通常会用一个箭头指示 n = 0 n=0 n=0 处的值,例如: x ( n ) = { 1 , 2 , 3 ‾ , 4 , 5 } x(n) = \{1, 2, \underline{3}, 4, 5\} x(n)={1,2,3,4,5},表示 x ( 0 ) = 3 , x ( − 1 ) = 2 , x ( − 2 ) = 1 , x ( 1 ) = 4 , x ( 2 ) = 5 x(0)=3, x(-1)=2, x(-2)=1, x(1)=4, x(2)=5 x(0)=3,x(−1)=2,x(−2)=1,x(1)=4,x(2)=5。 -
公式法: 使用数学公式来定义序列在每个时间点上的值。
例如: x ( n ) = n 2 u ( n ) x(n) = n^2 u(n) x(n)=n2u(n),其中 u ( n ) u(n) u(n) 是单位阶跃序列。这意味着当 n < 0 n<0 n<0 时, x ( n ) = 0 x(n)=0 x(n)=0;当 n ≥ 0 n \geq 0 n≥0 时, x ( n ) = n 2 x(n)=n^2 x(n)=n2。 -
图形法 (序列波形图): 将序列的每个值绘制在坐标轴上,横轴表示时间 n n n,纵轴表示序列值 x ( n ) x(n) x(n)。通常用垂直的直线或点来表示。
常见序列类型:数字世界的“基本粒子”
就像原子是构成物质的基本单位一样,在数字信号处理中,也有一些基础序列,它们是构成更复杂信号的“基本粒子”。
-
单位脉冲序列 (Unit Impulse Sequence)
- 定义:
δ ( n ) = { 1 , n = 0 0 , n ≠ 0 \delta(n) = \begin{cases} 1, & n = 0 \\ 0, & n \neq 0 \end{cases} δ(n)={1,0,n=0n=0 - 意义:它就像一个瞬时敲击,只在 n = 0 n=0 n=0 时刻有一个非零值。
- 应用:它是系统分析的基石。在DSP中,用一个单位脉冲序列作为输入,得到的输出就叫做单位脉冲响应,它就像一个系统的“指纹”,完全刻画了LTI系统的特性。
- 定义:
-
单位阶跃序列 (Unit Step Sequence)
- 定义:
u ( n ) = { 1 , n ≥ 0 0 , n < 0 u(n) = \begin{cases} 1, & n \geq 0 \\ 0, & n < 0 \end{cases} u(n)={1,0,n≥0n<0 - 意义:它表示一个信号从某个时刻开始出现并保持不变。
- 应用:常用来表示信号的开始或开关动作,很多因果序列(即只在 n ≥ 0 n \geq 0 n≥0 有值的序列)都会乘以 u ( n ) u(n) u(n)。
- 定义:
-
矩形序列 (Rectangular Sequence)
- 定义:
R M ( n ) = { 1 , 0 ≤ n ≤ M − 1 0 , 其他 R_M(n) = \begin{cases} 1, & 0 \leq n \leq M-1 \\ 0, & \text{其他} \end{cases} RM(n)={1,0,0≤n≤M−1其他 - 意义:在一段有限的时间内(长度为 M M M)取值为1,其他时间为0。
- 应用:常用于模拟数据帧、有限持续时间内的信号片段。
- 定义:
-
实指数序列 (Real Exponential Sequence)
- 定义: x ( n ) = a n u ( n ) x(n) = a^n u(n) x(n)=anu(n)
- 意义:如果 ∣ a ∣ > 1 |a|>1 ∣a∣>1,序列会指数增长;如果 ∣ a ∣ < 1 |a|<1 ∣a∣<1,序列会指数衰减。
- 应用:在物理、工程中模拟各种衰减或增长过程。
-
正弦序列 (Sinusoidal Sequence)
- 定义: x ( n ) = A cos ( ω 0 n + ϕ ) x(n) = A \cos(\omega_0 n + \phi) x(n)=Acos(ω0n+ϕ)
- 意义:离散时间下的周期性振荡信号。
- 参数: A A A 为幅度, ω 0 \omega_0 ω0 为数字角频率(单位:弧度/样本), ϕ \phi ϕ 为初始相位。
- 重要提示: 与模拟正弦信号不同,数字正弦序列不一定都是周期的!这是一个非常重要的特性。
-
复指数序列 (Complex Exponential Sequence)
- 定义: x ( n ) = e j ω 0 n = cos ( ω 0 n ) + j sin ( ω 0 n ) x(n) = e^{j\omega_0 n} = \cos(\omega_0 n) + j \sin(\omega_0 n) x(n)=ejω0n=cos(ω0n)+jsin(ω0n)
- 意义:它是正弦序列的更通用形式,是傅里叶分析和Z变换的基石。任何一个离散时间信号都可以被分解成复指数序列的叠加。
- 应用:理论分析和频率域变换的核心。
序列的周期性:数字信号的“循环”
对于一个序列 x ( n ) x(n) x(n),如果存在一个最小的正整数 N 0 N_0 N0,使得 x ( n ) = x ( n + N 0 ) x(n) = x(n+N_0) x(n)=x(n+N0) 对所有 n n n 都成立,那么称 x ( n ) x(n) x(n) 是周期序列, N 0 N_0 N0 称为最小正周期或基波周期。
判断正弦序列 x ( n ) = A cos ( ω 0 n + ϕ ) x(n) = A \cos(\omega_0 n + \phi) x(n)=Acos(ω0n+ϕ) 或复指数序列 x ( n ) = e j ω 0 n x(n) = e^{j\omega_0 n} x(n)=ejω0n 的周期性:
序列要具有周期性,需要满足 ω 0 N 0 = 2 π k \omega_0 N_0 = 2\pi k ω0N0=2πk,其中 k k k 是一个整数。
这意味着 ω 0 / ( 2 π ) = k / N 0 \omega_0 / (2\pi) = k/N_0 ω0/(2π)=k/N0。
因此,数字角频率 ω 0 \omega_0 ω0 必须是 2 π 2\pi 2π 的有理数倍,序列才是周期的。
如果 ω 0 / ( 2 π ) \omega_0 / (2\pi) ω0/(2π) 是一个有理数 k / N k/N k/N(其中 k k k 和 N N N 是互质的整数),那么最小正周期就是 N 0 = N N_0 = N N0=N。
举个例子:
- 序列 x ( n ) = cos ( 3 π 8 n ) x(n) = \cos(\frac{3\pi}{8}n) x(n)=cos(83πn)
这里的 ω 0 = 3 π 8 \omega_0 = \frac{3\pi}{8} ω0=83π。
ω 0 2 π = 3 π / 8 2 π = 3 16 \frac{\omega_0}{2\pi} = \frac{3\pi/8}{2\pi} = \frac{3}{16} 2πω0=2π3π/8=163。
这是一个有理数。 k = 3 , N = 16 k=3, N=16 k=3,N=16。由于 3 3 3 和 16 16 16 互质,所以最小正周期 N 0 = 16 N_0 = 16 N0=16。这个序列是周期的。 - 序列 x ( n ) = sin ( 0.3 n ) x(n) = \sin(0.3n) x(n)=sin(0.3n)
这里的 ω 0 = 0.3 \omega_0 = 0.3 ω0=0.3。
ω 0 2 π = 0.3 2 π = 3 20 π \frac{\omega_0}{2\pi} = \frac{0.3}{2\pi} = \frac{3}{20\pi} 2πω0=2π0.3=20π3。
这是一个无理数(因为含有 π \pi π)。所以这个序列不是周期的。
序列的基本运算:数字信号的“积木”
对序列进行运算是数字信号处理的基础,就像用积木搭建模型一样。
-
加法与乘法:
- 逐点运算,非常直观。
- y ( n ) = x 1 ( n ) + x 2 ( n ) y(n) = x_1(n) + x_2(n) y(n)=x1(n)+x2(n)
- y ( n ) = x 1 ( n ) ⋅ x 2 ( n ) y(n) = x_1(n) \cdot x_2(n) y(n)=x1(n)⋅x2(n)
-
时移 (Time Shift):
- 将序列在时间轴上向左或向右移动。
- y ( n ) = x ( n − n 0 ) y(n) = x(n-n_0) y(n)=x(n−n0)
- 如果 n 0 > 0 n_0 > 0 n0>0,表示将 x ( n ) x(n) x(n) 向右(延迟)移动 n 0 n_0 n0 个单位。
- 如果 n 0 < 0 n_0 < 0 n0<0,表示将 x ( n ) x(n) x(n) 向左(超前)移动 ∣ n 0 ∣ |n_0| ∣n0∣ 个单位。
- 应用:模拟信号的延迟、控制系统中状态的滞后等。
-
翻转 (Folding/Reversal):
- 将序列沿 n = 0 n=0 n=0 轴进行镜像翻转。
- y ( n ) = x ( − n ) y(n) = x(-n) y(n)=x(−n)
-
累加 (Accumulation):
- 将序列从负无穷到当前点的值进行求和。
- y ( n ) = ∑ m = − ∞ n x ( m ) y(n) = \sum_{m=-\infty}^{n} x(m) y(n)=∑m=−∞nx(m)
- 意义:是模拟信号积分的离散对应。例如,对速度序列进行累加可以得到位移序列。
-
差分 (Differencing):
- 计算序列相邻两个点之间的差值。
- y ( n ) = x ( n ) − x ( n − 1 ) y(n) = x(n) - x(n-1) y(n)=x(n)−x(n−1)
- 意义:是模拟信号微分的离散对应。例如,对位移序列进行差分可以得到速度序列。
-
尺度变换 (Scaling):
- 改变序列的“时间”尺度。
- y ( n ) = x ( a n ) y(n) = x(an) y(n)=x(an)
- 重要限制: 只有当 a n an an 为整数时,这个操作才有意义。这意味着,你不能随便“拉伸”或“压缩”一个离散序列,你只能在某些特定的点上“采样”或者“插值”。例如, x ( 2 n ) x(2n) x(2n) 表示每隔一个点取一个值,这相当于对原始信号进行“抽取”;而 x ( n / 2 ) x(n/2) x(n/2) 则需要考虑插值。
-
能量 (Energy):
- 有限能量信号的能量定义为:
E x = ∑ n = − ∞ ∞ ∣ x ( n ) ∣ 2 E_x = \sum_{n=-\infty}^{\infty} |x(n)|^2 Ex=n=−∞∑∞∣x(n)∣2 - 功率 (Power):对周期信号或能量无限的信号,通常定义为平均功率。
P x = lim N → ∞ 1 2 N + 1 ∑ n = − N N ∣ x ( n ) ∣ 2 P_x = \lim_{N \to \infty} \frac{1}{2N+1} \sum_{n=-N}^{N} |x(n)|^2 Px=N→∞lim2N+11n=−N∑N∣x(n)∣2 - 意义:衡量信号的“强度”或“大小”。
- 有限能量信号的能量定义为:
这些基本概念和运算,是理解后续更复杂DSP内容的基础。请务必熟练掌握。
信号的“处理器”:离散时间系统
有了离散时间信号这个“原料”,我们还需要“加工厂”来处理它们。这个“加工厂”就是离散时间系统。
什么是离散时间系统?
一个离散时间系统可以看作是一个黑箱子,它接收一个输入序列 x ( n ) x(n) x(n),经过一系列处理,产生一个输出序列 y ( n ) y(n) y(n)。我们可以用 T [ ⋅ ] T[\cdot] T[⋅] 来表示这个系统,即 y ( n ) = T [ x ( n ) ] y(n) = T[x(n)] y(n)=T[x(n)]。
系统通常通过差分方程来描述,例如: y ( n ) = 0.5 x ( n ) + 0.5 x ( n − 1 ) y(n) = 0.5x(n) + 0.5x(n-1) y(n)=0.5x(n)+0.5x(n−1),表示当前输出是当前输入和前一个输入的平均值。
系统的基本特性:数字系统的高效运行法则
在众多系统特性中,线性和时不变性是最重要的两个。如果一个系统同时满足这两者,我们称之为线性时不变系统 (LTI System),它在DSP中具有无与伦比的地位。
-
线性 (Linearity):
线性系统满足叠加原理。这意味着:- 齐次性(Homogeneity): 对输入信号进行放大,输出信号也会按相同的比例放大。
T [ a x ( n ) ] = a T [ x ( n ) ] T[ax(n)] = aT[x(n)] T[ax(n)]=aT[x(n)] - 可加性(Additivity): 多个输入信号之和的输出,等于每个信号单独输入时的输出之和。
T [ x 1 ( n ) + x 2 ( n ) ] = T [ x 1 ( n ) ] + T [ x 2 ( n ) ] T[x_1(n) + x_2(n)] = T[x_1(n)] + T[x_2(n)] T[x1(n)+x2(n)]=T[x1(n)]+T[x2(n)] - 更简洁的验证方式是同时验证: T [ a x 1 ( n ) + b x 2 ( n ) ] = a T [ x 1 ( n ) ] + b T [ x 2 ( n ) ] T[ax_1(n) + bx_2(n)] = aT[x_1(n)] + bT[x_2(n)] T[ax1(n)+bx2(n)]=aT[x1(n)]+bT[x2(n)]。
- 直观理解: 线性系统不会对信号产生“变形扭曲”,它处理信号的方式是“公平”的,不偏不倚。例如,一个音响系统,你把音量调大一倍,声音的“形状”不会变,只是响度大了。但如果你把音量调得太大,导致失真(削波),那它就变得非线性了。
- 齐次性(Homogeneity): 对输入信号进行放大,输出信号也会按相同的比例放大。
-
时不变性 (Time-Invariance):
时不变系统是指,系统的行为不随时间的变化而改变。- 如果输入 x ( n ) x(n) x(n) 产生输出 y ( n ) y(n) y(n),那么将输入延迟 n 0 n_0 n0 个单位时间,即 x ( n − n 0 ) x(n-n_0) x(n−n0),产生的输出也仅仅是 y ( n ) y(n) y(n) 延迟 n 0 n_0 n0 个单位时间,即 y ( n − n 0 ) y(n-n_0) y(n−n0)。
T [ x ( n − n 0 ) ] = y ( n − n 0 ) T[x(n-n_0)] = y(n-n_0) T[x(n−n0)]=y(n−n0) - 直观理解: 一个时不变的信号处理算法,今天用它处理一段语音,明天用它处理同一段语音,结果应该完全一样。例如,一个数字滤波器,它的滤波效果不会因为你是在上午用还是下午用而改变。但如果你家里的老式收音机,随着电池电量下降,信号接收效果变差,那它就是一个时变系统。
- 如果输入 x ( n ) x(n) x(n) 产生输出 y ( n ) y(n) y(n),那么将输入延迟 n 0 n_0 n0 个单位时间,即 x ( n − n 0 ) x(n-n_0) x(n−n0),产生的输出也仅仅是 y ( n ) y(n) y(n) 延迟 n 0 n_0 n0 个单位时间,即 y ( n − n 0 ) y(n-n_0) y(n−n0)。
LTI 系统:数字信号处理的“黄金标准”
由于线性系统和时不变系统具有优秀的数学性质,所以DSP中绝大部分理论和算法都是围绕LTI系统展开的。LTI系统的核心在于,它的行为完全由其单位脉冲响应 h ( n ) h(n) h(n) 来决定。
卷积:LTI 系统的“核心算法”
一个LTI系统最重要的特性是,它的输出 y ( n ) y(n) y(n) 可以通过输入 x ( n ) x(n) x(n) 与其单位脉冲响应 h ( n ) h(n) h(n) 的**卷积(Convolution)**来计算。
-
定义:
y ( n ) = x ( n ) ∗ h ( n ) = ∑ k = − ∞ ∞ x ( k ) h ( n − k ) y(n) = x(n) \ast h(n) = \sum_{k=-\infty}^{\infty} x(k) h(n-k) y(n)=x(n)∗h(n)=k=−∞∑∞x(k)h(n−k)
这个公式也称为卷积和。 -
直观理解:
想象 x ( n ) x(n) x(n) 是一系列“刺激”,而 h ( n ) h(n) h(n) 是系统对一个“瞬时刺激”(单位脉冲)的“反应模式”。卷积运算的意义是:将输入信号 x ( n ) x(n) x(n) 拆解成无数个不同时刻的单位脉冲信号的加权和(每个 x ( k ) δ ( n − k ) x(k)\delta(n-k) x(k)δ(n−k)),然后计算系统对每个单位脉冲的响应(即 x ( k ) h ( n − k ) x(k)h(n-k) x(k)h(n−k)),最后将所有这些响应叠加起来,就得到了总的输出 y ( n ) y(n) y(n)。
这个过程就像你往一个水池里扔石头,每个石头( x ( k ) x(k) x(k))会激起一个涟漪( h ( n − k ) h(n-k) h(n−k)),而最终的水面波动( y ( n ) y(n) y(n))是所有涟漪叠加的结果。
- 卷积性质:
卷积运算具有一些重要的性质,它们使得复杂系统的分析和设计变得更加容易:- 交换律: x ( n ) ∗ h ( n ) = h ( n ) ∗ x ( n ) x(n) \ast h(n) = h(n) \ast x(n) x(n)∗h(n)=h(n)∗x(n)
这表明输入和系统响应的顺序可以互换,结果不变。 - 结合律: ( x ( n ) ∗ h 1 ( n ) ) ∗ h 2 ( n ) = x ( n ) ∗ ( h 1 ( n ) ∗ h 2 ( n ) ) (x(n) \ast h_1(n)) \ast h_2(n) = x(n) \ast (h_1(n) \ast h_2(n)) (x(n)∗h1(n))∗h2(n)=x(n)∗(h1(n)∗h2(n))
多个LTI系统串联时,它们的整体响应是各个系统响应的卷积。这意味着你可以在分析时先将串联的系统合并为一个等效系统。 - 分配律: x ( n ) ∗ ( h 1 ( n ) + h 2 ( n ) ) = x ( n ) ∗ h 1 ( n ) + x ( n ) ∗ h 2 ( n ) x(n) \ast (h_1(n) + h_2(n)) = x(n) \ast h_1(n) + x(n) \ast h_2(n) x(n)∗(h1(n)+h2(n))=x(n)∗h1(n)+x(n)∗h2(n)
多个LTI系统并联时,它们的总输出是各自输出的叠加。
- 交换律: x ( n ) ∗ h ( n ) = h ( n ) ∗ x ( n ) x(n) \ast h(n) = h(n) \ast x(n) x(n)∗h(n)=h(n)∗x(n)
系统的因果性与稳定性:确保系统“可靠”运行
除了线性和时不变性,因果性和稳定性也是衡量系统好坏的重要指标。
-
因果性 (Causality):
- 一个因果系统,其当前时刻的输出 y ( n ) y(n) y(n) 只取决于当前时刻和过去时刻的输入 x ( k ) x(k) x(k) 以及过去的输出 y ( k ) y(k) y(k)。它不能“预知未来”。
- 对于LTI系统: 因果性的要求是其单位脉冲响应 h ( n ) h(n) h(n) 必须满足 h ( n ) = 0 h(n)=0 h(n)=0 对于 n < 0 n<0 n<0。
- 实际意义: 任何能够实时工作的物理系统都必须是因果的。你不能让一个控制器根据传感器未来的读数来决定现在的动作。
-
稳定性 (Stability):
- 我们最常讨论的是BIBO稳定性 (Bounded Input Bounded Output Stability)。一个BIBO稳定的系统,对于任何有界的输入(输入信号的幅度不发散),其输出信号的幅度也必须是有界的(输出信号的幅度也不发散)。
- 对于LTI系统: BIBO稳定性的条件是其单位脉冲响应 h ( n ) h(n) h(n) 必须是绝对可和的,即:
∑ n = − ∞ ∞ ∣ h ( n ) ∣ < ∞ \sum_{n=-\infty}^{\infty} |h(n)| < \infty n=−∞∑∞∣h(n)∣<∞ - 实际意义: 稳定的系统不会“发散”或“崩溃”。例如,一个控制系统如果不稳定,可能会导致设备振荡加剧,甚至损坏。
差分方程:描述数字系统的“数学语言”
在DSP中,我们通常用线性常系数差分方程 (LCCDE) 来描述LTI系统。这就像在模拟信号处理中用线性常系数微分方程描述系统一样。
线性常系数差分方程的形式
一个典型的N阶LCCDE的形式如下:
∑ k = 0 N a k y ( n − k ) = ∑ m = 0 M b m x ( n − m ) \sum_{k=0}^N a_k y(n-k) = \sum_{m=0}^M b_m x(n-m) k=0∑Naky(n−k)=m=0∑Mbmx(n−m)
其中:
- y ( n ) y(n) y(n) 是当前时刻的输出。
- y ( n − k ) y(n-k) y(n−k) 是过去的输出项。
- x ( n ) x(n) x(n) 是当前时刻的输入。
- x ( n − m ) x(n-m) x(n−m) 是过去的输入项。
- a k a_k ak 和 b m b_m bm 是常数系数。
- N N N 是输出项的最大延迟,称为系统的阶数。
例子:
y ( n ) − 0.5 y ( n − 1 ) = x ( n ) + 0.2 x ( n − 1 ) y(n) - 0.5y(n-1) = x(n) + 0.2x(n-1) y(n)−0.5y(n−1)=x(n)+0.2x(n−1)
这是一个1阶LCCDE。
求解方法
-
递推解法 (Iterative Solution):
当给定输入序列 x ( n ) x(n) x(n) 和系统的初始条件(即 y ( − 1 ) , y ( − 2 ) , … y(-1), y(-2), \dots y(−1),y(−2),…)时,我们可以通过将差分方程改写为递推形式来逐步计算输出 y ( n ) y(n) y(n)。
例如,对于上面的方程,可以改写为: y ( n ) = 0.5 y ( n − 1 ) + x ( n ) + 0.2 x ( n − 1 ) y(n) = 0.5y(n-1) + x(n) + 0.2x(n-1) y(n)=0.5y(n−1)+x(n)+0.2x(n−1)。
这样,你就可以从 n = 0 n=0 n=0 开始,依次计算 y ( 0 ) , y ( 1 ) , y ( 2 ) , … y(0), y(1), y(2), \dots y(0),y(1),y(2),…。求解单位脉冲响应 h ( n ) h(n) h(n):
递推法的一个重要应用就是求解系统的单位脉冲响应 h ( n ) h(n) h(n)。根据定义, h ( n ) h(n) h(n) 是当输入 x ( n ) = δ ( n ) x(n) = \delta(n) x(n)=δ(n) 且所有初始条件为零时系统的输出。
步骤:- 令 x ( n ) = δ ( n ) x(n) = \delta(n) x(n)=δ(n)。
- 设定所有初始条件为零(即 y ( n ) = 0 y(n)=0 y(n)=0 for n < 0 n<0 n<0)。
- 从 n = 0 n=0 n=0 开始,逐点递推计算 y ( n ) y(n) y(n) 的值。
例: 求 y ( n ) − 0.5 y ( n − 1 ) = x ( n ) y(n) - 0.5y(n-1) = x(n) y(n)−0.5y(n−1)=x(n) 的单位脉冲响应 h ( n ) h(n) h(n)。
改写为 y ( n ) = 0.5 y ( n − 1 ) + x ( n ) y(n) = 0.5y(n-1) + x(n) y(n)=0.5y(n−1)+x(n)。
令 y ( − 1 ) = 0 y(-1)=0 y(−1)=0。- n = 0 n=0 n=0 时: h ( 0 ) = 0.5 h ( − 1 ) + δ ( 0 ) = 0.5 × 0 + 1 = 1 h(0) = 0.5h(-1) + \delta(0) = 0.5 \times 0 + 1 = 1 h(0)=0.5h(−1)+δ(0)=0.5×0+1=1
- n = 1 n=1 n=1 时: h ( 1 ) = 0.5 h ( 0 ) + δ ( 1 ) = 0.5 × 1 + 0 = 0.5 h(1) = 0.5h(0) + \delta(1) = 0.5 \times 1 + 0 = 0.5 h(1)=0.5h(0)+δ(1)=0.5×1+0=0.5
- n = 2 n=2 n=2 时: h ( 2 ) = 0.5 h ( 1 ) + δ ( 2 ) = 0.5 × 0.5 + 0 = 0.25 h(2) = 0.5h(1) + \delta(2) = 0.5 \times 0.5 + 0 = 0.25 h(2)=0.5h(1)+δ(2)=0.5×0.5+0=0.25
- n = 3 n=3 n=3 时: h ( 3 ) = 0.5 h ( 2 ) + δ ( 3 ) = 0.5 × 0.25 + 0 = 0.125 h(3) = 0.5h(2) + \delta(3) = 0.5 \times 0.25 + 0 = 0.125 h(3)=0.5h(2)+δ(3)=0.5×0.25+0=0.125
依此类推,得到 h ( n ) = ( 0.5 ) n u ( n ) h(n) = (0.5)^n u(n) h(n)=(0.5)nu(n)。
-
经典解法 (齐次解 + 特解):
与微分方程类似,解差分方程也可以分为求解齐次方程的解(系统的自由响应)和特解(系统的受迫响应),然后叠加。这种方法在手算时比较复杂,不如 Z 变换法常用。 -
变换域解法 (Z 变换):
这是最强大、最常用的方法。通过将差分方程转换为Z域的代数方程来求解,大大简化了计算。我们将在第二章详细介绍。
从模拟到数字:信号的“数字化之旅”
现在我们已经了解了离散时间信号和系统本身,但现实世界中的信号往往是模拟的。如何将这些模拟信号“送入”数字系统进行处理呢?这就涉及到了模数转换 (A/D Conversion) 和 数模转换 (D/A Conversion)。
A/D 转换:现实世界的“扫描仪”
A/D 转换器(ADC)是连接模拟世界和数字世界的桥梁。它将连续时间的模拟信号 x a ( t ) x_a(t) xa(t) 转换为离散时间的数字信号 x ( n ) x(n) x(n)。这个过程通常包含三个关键步骤:
-
采样 (Sampling):
这是模数转换的第一步,也是最重要的一步。它以固定的时间间隔 T T T(采样周期)对模拟信号的幅度进行测量。
如果采样频率为 f s = 1 / T f_s = 1/T fs=1/T,那么采样序列就是 x ( n ) = x a ( n T ) x(n) = x_a(nT) x(n)=xa(nT)。采样定理 (Nyquist-Shannon Sampling Theorem):
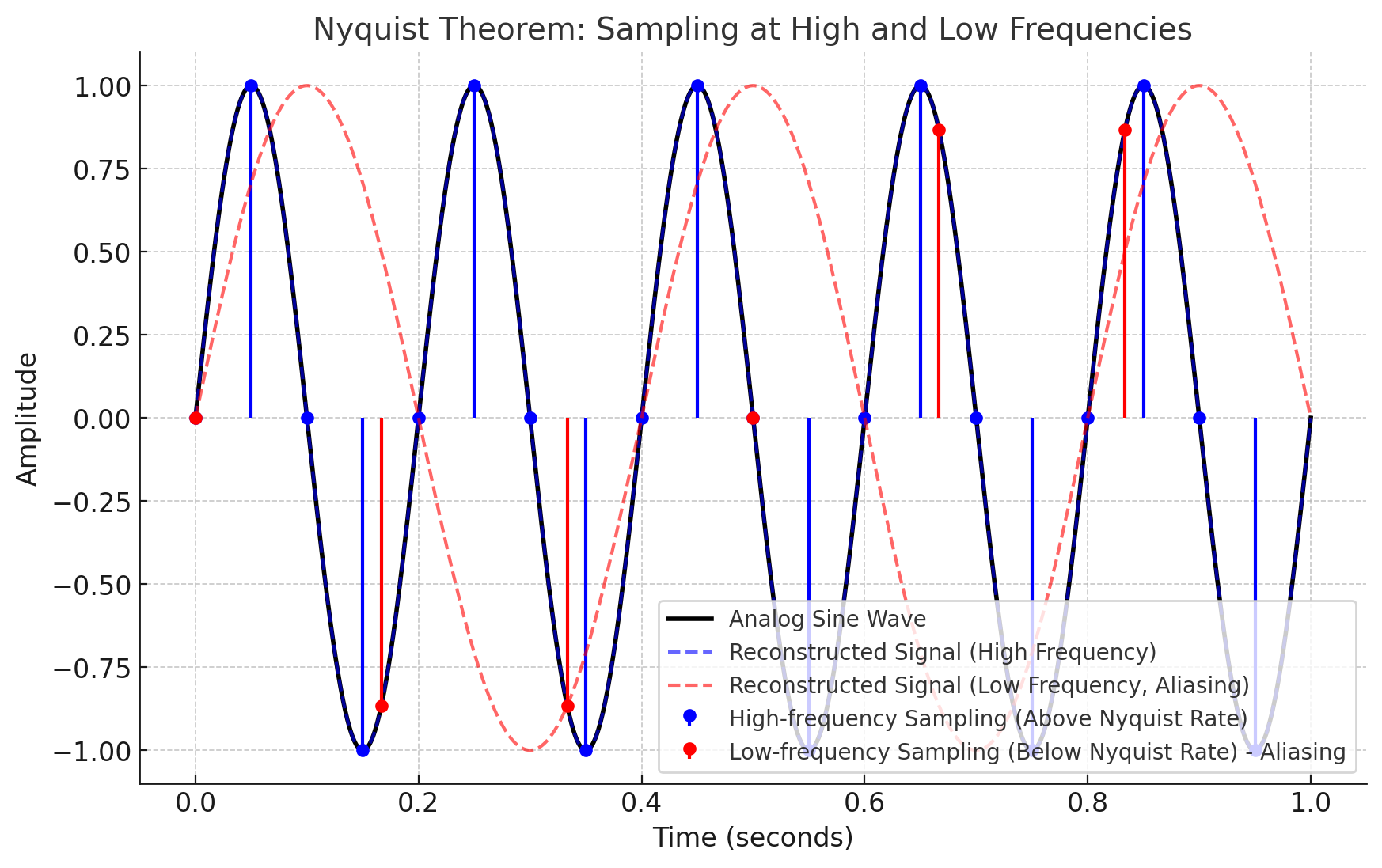
这是DSP中的“黄金法则”!它告诉我们,为了能够从采样序列中无失真地恢复原始模拟信号,采样频率 f s f_s fs 必须至少是模拟信号中最高频率 f c f_c fc 的两倍。
即: f s ≥ 2 f c f_s \geq 2f_c fs≥2fc如果采样频率低于 2 f c 2f_c 2fc,就会发生混叠 (Aliasing) 现象。混叠是指高频分量被错误地映射到低频区域,导致信号失真,且这种失真无法通过后续处理消除。
例如,你用摄像机拍摄一个高速旋转的车轮,如果帧率(采样频率)不够高,车轮可能看起来在缓慢地向后转动,这就是一种视觉上的混叠。在数字域,频率 ω \omega ω 与模拟域频率 Ω \Omega Ω 的关系是 ω = Ω T = Ω / f s \omega = \Omega T = \Omega / f_s ω=ΩT=Ω/fs。
根据采样定理,最高模拟频率 f c f_c fc 对应数字频率 ω c = 2 π f c / f s ≤ π \omega_c = 2\pi f_c / f_s \leq \pi ωc=2πfc/fs≤π。
因此,数字频率通常位于范围 [ − π , π ) [-\pi, \pi) [−π,π) 或 [ 0 , 2 π ) [0, 2\pi) [0,2π) 之间。
-
量化 (Quantization):
采样的结果仍然是连续的幅度值(虽然时间是离散的)。量化是将这些连续的幅度值转换为有限的、离散的幅度值。
例如,一个声音信号的采样值可能是 0.325V,如果用8位量化,它可能被量化为 0.32V。这个过程会引入量化误差或量化噪声。量化位数越多,量化误差越小,但所需的存储空间和计算资源也越多。 -
编码 (Coding):
量化后的离散幅度值需要被转换为二进制代码,以便数字电路和计算机进行存储和处理。这是从“离散值”到“数字代码”的最终步骤。
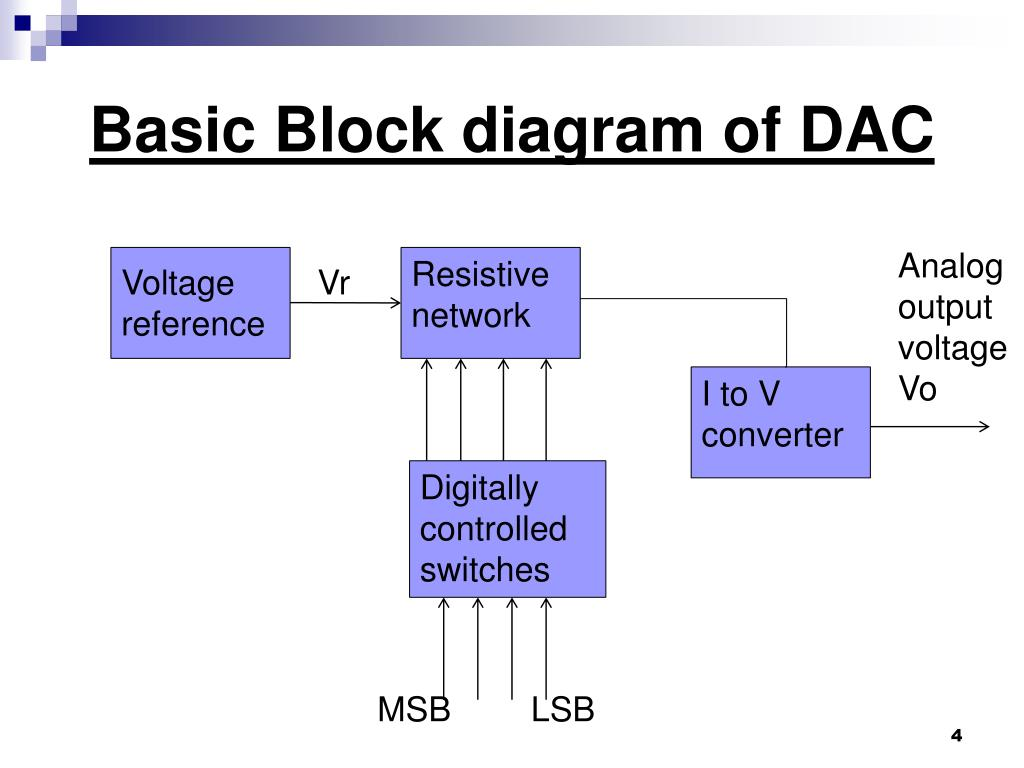
D/A 转换:数字信号的“复原师”
D/A 转换器(DAC)是模数转换的逆过程,它将数字信号 x ( n ) x(n) x(n) 转换为模拟信号 y a ( t ) y_a(t) ya(t)。
- 数字到模拟的转换: DAC 接收二进制代码,并将其转换为对应的模拟幅度值(通常是电压或电流)。
- 重建滤波器 (Reconstruction Filter):
DAC 输出的模拟信号通常是一个“阶梯状”的信号,它由一系列在采样点上跳变的离散电平组成。为了得到平滑的、接近原始的模拟信号,我们需要使用一个重建滤波器,通常是一个低通滤波器。
这个滤波器会滤除数字信号中采样带来的高频成分(例如,零阶保持器输出的“台阶”之间的矩形脉冲),从而“平滑”信号,使其恢复到接近原始模拟信号的形态。
在实际应用中,模数转换和数模转换的质量直接影响着数字信号处理系统的性能。优秀的ADC和DAC是高性能DSP系统的基础。
总结与展望
在这一章中,我们踏入了数字信号处理的大门,认识了最基本的“砖块”和“工具”:
- 离散时间信号(序列):理解它们如何表示,常见的类型有哪些,以及它们的基本运算和周期性。
- 离散时间系统:学习了系统的基本属性——线性、时不变性、因果性和稳定性。其中,LTI系统因其特性优良而成为DSP的焦点,而卷积则是描述LTI系统核心行为的数学工具。
- 线性常系数差分方程:这是描述LTI系统的数学语言,我们了解了其形式及基本的递推求解方法。
- 模数/数模转换:理解了信号从模拟世界进入数字世界(采样、量化、编码)和从数字世界返回模拟世界(DAC、重建滤波)的关键过程,以及采样定理的重要性。
这些知识点就像是DSP大厦的地基。虽然现在你可能觉得有些概念还比较抽象,但请相信,随着我们学习的深入,你会越来越体会到它们的重要性。下一章,我们将介绍一种更强大的数学工具——Z变换,它能将时域的卷积运算转化为Z域的简单乘法,极大地简化LTI系统的分析和设计。敬请期待!
习题
学以致用,下面是几道练习题,帮助你巩固本章的知识点。
1. 序列周期性判断:
判断以下序列是否是周期的,如果是,请计算其最小正周期 N 0 N_0 N0。
a) x ( n ) = cos ( 3 π 8 n ) x(n) = \cos(\frac{3\pi}{8}n) x(n)=cos(83πn)
b) x ( n ) = sin ( 0.3 n ) x(n) = \sin(0.3n) x(n)=sin(0.3n)
c) x ( n ) = e j 2 π 5 n + e j 4 π 7 n x(n) = e^{j\frac{2\pi}{5}n} + e^{j\frac{4\pi}{7}n} x(n)=ej52πn+ej74πn
2. 系统特性判断 (线性与时不变性):
判断以下系统是否是线性的,是否是时不变的。给出你的判断依据。
a) y ( n ) = x ( n 2 ) y(n) = x(n^2) y(n)=x(n2)
b) y ( n ) = x ( n ) + x ( n − 1 ) y(n) = x(n) + x(n-1) y(n)=x(n)+x(n−1)
c) y ( n ) = x ( n ) + n y(n) = x(n) + n y(n)=x(n)+n
3. 卷积运算:
已知序列 x ( n ) = { 1 , 2 , 3 } x(n) = \{1, 2, 3\} x(n)={1,2,3} (从 n = 0 n=0 n=0 开始) 和 h ( n ) = { 1 , 1 } h(n) = \{1, 1\} h(n)={1,1} (从 n = 0 n=0 n=0 开始)。计算 y ( n ) = x ( n ) ∗ h ( n ) y(n) = x(n) \ast h(n) y(n)=x(n)∗h(n)。
提示:可以使用卷积和的定义 y ( n ) = ∑ k = − ∞ ∞ x ( k ) h ( n − k ) y(n) = \sum_{k=-\infty}^{\infty} x(k) h(n-k) y(n)=∑k=−∞∞x(k)h(n−k)。
4. 递推法求解差分方程和单位脉冲响应:
一个因果 LTI 系统由差分方程描述: y ( n ) − 0.5 y ( n − 1 ) = x ( n ) y(n) - 0.5y(n-1) = x(n) y(n)−0.5y(n−1)=x(n)。
a) 用递推法计算当输入 x ( n ) = δ ( n ) x(n) = \delta(n) x(n)=δ(n) 且初始条件为零时的输出 y ( n ) y(n) y(n),即系统的单位脉冲响应 h ( n ) h(n) h(n) 的前5个值 ( h ( 0 ) h(0) h(0) 到 h ( 4 ) h(4) h(4))。
b) 判断该系统是否稳定,是否因果。
答案
1. 序列周期性判断:
a) 对于 x ( n ) = cos ( 3 π 8 n ) x(n) = \cos(\frac{3\pi}{8}n) x(n)=cos(83πn),数字角频率 ω 0 = 3 π 8 \omega_0 = \frac{3\pi}{8} ω0=83π。
ω 0 2 π = 3 π / 8 2 π = 3 16 \frac{\omega_0}{2\pi} = \frac{3\pi/8}{2\pi} = \frac{3}{16} 2πω0=2π3π/8=163。这是一个有理数。因为 k = 3 , N = 16 k=3, N=16 k=3,N=16 且 gcd ( 3 , 16 ) = 1 \text{gcd}(3,16)=1 gcd(3,16)=1,所以序列是周期的,最小正周期 N 0 = 16 N_0 = 16 N0=16。
b) 对于 x ( n ) = sin ( 0.3 n ) x(n) = \sin(0.3n) x(n)=sin(0.3n),数字角频率 ω 0 = 0.3 \omega_0 = 0.3 ω0=0.3。
ω 0 2 π = 0.3 2 π = 3 20 π \frac{\omega_0}{2\pi} = \frac{0.3}{2\pi} = \frac{3}{20\pi} 2πω0=2π0.3=20π3。这是一个无理数(含有 π \pi π),所以序列不是周期的。
c) 对于 x ( n ) = e j 2 π 5 n + e j 4 π 7 n x(n) = e^{j\frac{2\pi}{5}n} + e^{j\frac{4\pi}{7}n} x(n)=ej52πn+ej74πn,这是一个复合序列。
第一个分量 x 1 ( n ) = e j 2 π 5 n x_1(n) = e^{j\frac{2\pi}{5}n} x1(n)=ej52πn 的周期 N 1 = 5 N_1 = 5 N1=5 (因为 2 π / 5 2 π = 1 5 \frac{2\pi/5}{2\pi} = \frac{1}{5} 2π2π/5=51)。
第二个分量 x 2 ( n ) = e j 4 π 7 n x_2(n) = e^{j\frac{4\pi}{7}n} x2(n)=ej74πn 的周期 N 2 = 7 N_2 = 7 N2=7 (因为 4 π / 7 2 π = 2 7 \frac{4\pi/7}{2\pi} = \frac{2}{7} 2π4π/7=72, gcd ( 2 , 7 ) = 1 \text{gcd}(2,7)=1 gcd(2,7)=1, N 2 = 7 N_2 = 7 N2=7)。
复合序列的周期是两个分量周期的最小公倍数: N 0 = lcm ( N 1 , N 2 ) = lcm ( 5 , 7 ) = 35 N_0 = \text{lcm}(N_1, N_2) = \text{lcm}(5, 7) = 35 N0=lcm(N1,N2)=lcm(5,7)=35。
所以序列是周期的,最小正周期 N 0 = 35 N_0 = 35 N0=35。
2. 系统特性判断 (线性与时不变性):
a) y ( n ) = x ( n 2 ) y(n) = x(n^2) y(n)=x(n2)
- 线性: 设 x ( n ) = a x 1 ( n ) + b x 2 ( n ) x(n) = ax_1(n) + bx_2(n) x(n)=ax1(n)+bx2(n)。
y ( n ) = T [ a x 1 ( n ) + b x 2 ( n ) ] = ( a x 1 ( n ) + b x 2 ( n 2 ) ) = a x 1 ( n 2 ) + b x 2 ( n 2 ) = a T [ x 1 ( n ) ] + b T [ x 2 ( n ) ] y(n) = T[ax_1(n) + bx_2(n)] = (ax_1(n) + bx_2(n^2)) = ax_1(n^2) + bx_2(n^2) = aT[x_1(n)] + bT[x_2(n)] y(n)=T[ax1(n)+bx2(n)]=(ax1(n)+bx2(n2))=ax1(n2)+bx2(n2)=aT[x1(n)]+bT[x2(n)]。
所以是线性的。 - 时不变性: 设 y ( n ) = x ( n 2 ) y(n) = x(n^2) y(n)=x(n2)。
延迟输入: x ′ ( n ) = x ( n − n 0 ) x'(n) = x(n-n_0) x′(n)=x(n−n0)。则 y ′ ( n ) = T [ x ( n − n 0 ) ] = x ( ( n − n 0 ) 2 ) y'(n) = T[x(n-n_0)] = x((n-n_0)^2) y′(n)=T[x(n−n0)]=x((n−n0)2)。
延迟输出: y ( n − n 0 ) = x ( ( n − n 0 ) 2 ) y(n-n_0) = x((n-n_0)^2) y(n−n0)=x((n−n0)2)。
这两个不相等,例如,当 n 0 = 1 n_0=1 n0=1, y ( n − 1 ) = x ( ( n − 1 ) 2 ) y(n-1) = x((n-1)^2) y(n−1)=x((n−1)2),而 y ′ ( n ) = x ( n 2 − 2 n 0 + n 0 2 ) y'(n) = x(n^2-2n_0+n_0^2) y′(n)=x(n2−2n0+n02) 不等于 x ( ( n − n 0 ) 2 ) x((n-n_0)^2) x((n−n0)2)。
举例: x ( n ) = δ ( n ) x(n)=\delta(n) x(n)=δ(n), y ( n ) = δ ( n 2 ) = δ ( n ) y(n)=\delta(n^2)=\delta(n) y(n)=δ(n2)=δ(n)。
x ( n − 1 ) = δ ( n − 1 ) x(n-1)=\delta(n-1) x(n−1)=δ(n−1), y ′ ( n ) = δ ( ( n − 1 ) 2 ) y'(n)=\delta((n-1)^2) y′(n)=δ((n−1)2) 只在 n = 1 n=1 n=1 有值。
y ( n − 1 ) = δ ( n − 1 ) y(n-1)=\delta(n-1) y(n−1)=δ(n−1)。
显然 y ′ ( n ) ≠ y ( n − 1 ) y'(n) \neq y(n-1) y′(n)=y(n−1)。所以是时变的。
结论:线性,时变。
b) y ( n ) = x ( n ) + x ( n − 1 ) y(n) = x(n) + x(n-1) y(n)=x(n)+x(n−1)
- 线性: 设 x ( n ) = a x 1 ( n ) + b x 2 ( n ) x(n) = ax_1(n) + bx_2(n) x(n)=ax1(n)+bx2(n)。
y ( n ) = ( a x 1 ( n ) + b x 2 ( n ) ) + ( a x 1 ( n − 1 ) + b x 2 ( n − 1 ) ) y(n) = (ax_1(n) + bx_2(n)) + (ax_1(n-1) + bx_2(n-1)) y(n)=(ax1(n)+bx2(n))+(ax1(n−1)+bx2(n−1))
y ( n ) = a ( x 1 ( n ) + x 1 ( n − 1 ) ) + b ( x 2 ( n ) + x 2 ( n − 1 ) ) y(n) = a(x_1(n) + x_1(n-1)) + b(x_2(n) + x_2(n-1)) y(n)=a(x1(n)+x1(n−1))+b(x2(n)+x2(n−1))
y ( n ) = a T [ x 1 ( n ) ] + b T [ x 2 ( n ) ] y(n) = aT[x_1(n)] + bT[x_2(n)] y(n)=aT[x1(n)]+bT[x2(n)]。
所以是线性的。 - 时不变性: 设 y ( n ) = x ( n ) + x ( n − 1 ) y(n) = x(n) + x(n-1) y(n)=x(n)+x(n−1)。
延迟输入: x ′ ( n ) = x ( n − n 0 ) x'(n) = x(n-n_0) x′(n)=x(n−n0)。则 y ′ ( n ) = T [ x ( n − n 0 ) ] = x ( n − n 0 ) + x ( n − n 0 − 1 ) y'(n) = T[x(n-n_0)] = x(n-n_0) + x(n-n_0-1) y′(n)=T[x(n−n0)]=x(n−n0)+x(n−n0−1)。
延迟输出: y ( n − n 0 ) = x ( n − n 0 ) + x ( n − n 0 − 1 ) y(n-n_0) = x(n-n_0) + x(n-n_0-1) y(n−n0)=x(n−n0)+x(n−n0−1)。
y ′ ( n ) = y ( n − n 0 ) y'(n) = y(n-n_0) y′(n)=y(n−n0)。所以是时不变的。
结论:线性,时不变。
c) y ( n ) = x ( n ) + n y(n) = x(n) + n y(n)=x(n)+n
- 线性: 设 x ( n ) = a x 1 ( n ) + b x 2 ( n ) x(n) = ax_1(n) + bx_2(n) x(n)=ax1(n)+bx2(n)。
y ( n ) = ( a x 1 ( n ) + b x 2 ( n ) ) + n y(n) = (ax_1(n) + bx_2(n)) + n y(n)=(ax1(n)+bx2(n))+n。
而 a T [ x 1 ( n ) ] + b T [ x 2 ( n ) ] = a ( x 1 ( n ) + n ) + b ( x 2 ( n ) + n ) = a x 1 ( n ) + b x 2 ( n ) + ( a + b ) n aT[x_1(n)] + bT[x_2(n)] = a(x_1(n)+n) + b(x_2(n)+n) = ax_1(n) + bx_2(n) + (a+b)n aT[x1(n)]+bT[x2(n)]=a(x1(n)+n)+b(x2(n)+n)=ax1(n)+bx2(n)+(a+b)n。
由于 n n n 项的存在,如果 a + b ≠ 1 a+b \neq 1 a+b=1,则不满足线性。例如,取 a = 1 , b = 1 a=1, b=1 a=1,b=1,则 y ( n ) = x 1 ( n ) + x 2 ( n ) + n y(n) = x_1(n)+x_2(n)+n y(n)=x1(n)+x2(n)+n,而 T [ x 1 ( n ) ] + T [ x 2 ( n ) ] = x 1 ( n ) + n + x 2 ( n ) + n = x 1 ( n ) + x 2 ( n ) + 2 n T[x_1(n)]+T[x_2(n)] = x_1(n)+n + x_2(n)+n = x_1(n)+x_2(n)+2n T[x1(n)]+T[x2(n)]=x1(n)+n+x2(n)+n=x1(n)+x2(n)+2n。所以不满足线性。 - 时不变性: 设 y ( n ) = x ( n ) + n y(n) = x(n) + n y(n)=x(n)+n。
延迟输入: x ′ ( n ) = x ( n − n 0 ) x'(n) = x(n-n_0) x′(n)=x(n−n0)。则 y ′ ( n ) = T [ x ( n − n 0 ) ] = x ( n − n 0 ) + n y'(n) = T[x(n-n_0)] = x(n-n_0) + n y′(n)=T[x(n−n0)]=x(n−n0)+n。
延迟输出: y ( n − n 0 ) = x ( n − n 0 ) + ( n − n 0 ) y(n-n_0) = x(n-n_0) + (n-n_0) y(n−n0)=x(n−n0)+(n−n0)。
由于 n n n 项变为 n − n 0 n-n_0 n−n0,所以 y ′ ( n ) ≠ y ( n − n 0 ) y'(n) \neq y(n-n_0) y′(n)=y(n−n0)。所以是时变的。
结论:非线性,时变。
3. 卷积运算:
x ( n ) = { 1 , 2 , 3 } x(n) = \{1, 2, 3\} x(n)={1,2,3} (从 n = 0 n=0 n=0 开始),即 x ( 0 ) = 1 , x ( 1 ) = 2 , x ( 2 ) = 3 x(0)=1, x(1)=2, x(2)=3 x(0)=1,x(1)=2,x(2)=3。
h ( n ) = { 1 , 1 } h(n) = \{1, 1\} h(n)={1,1} (从 n = 0 n=0 n=0 开始),即 h ( 0 ) = 1 , h ( 1 ) = 1 h(0)=1, h(1)=1 h(0)=1,h(1)=1。
卷积长度 L = ( 3 − 1 ) + ( 2 − 1 ) + 1 = 2 + 1 + 1 = 4 L = (3-1) + (2-1) + 1 = 2+1+1 = 4 L=(3−1)+(2−1)+1=2+1+1=4。
y ( n ) = ∑ k = − ∞ ∞ x ( k ) h ( n − k ) y(n) = \sum_{k=-\infty}^{\infty} x(k) h(n-k) y(n)=∑k=−∞∞x(k)h(n−k)
- y ( 0 ) = x ( 0 ) h ( 0 ) = 1 ⋅ 1 = 1 y(0) = x(0)h(0) = 1 \cdot 1 = 1 y(0)=x(0)h(0)=1⋅1=1
- y ( 1 ) = x ( 0 ) h ( 1 ) + x ( 1 ) h ( 0 ) = 1 ⋅ 1 + 2 ⋅ 1 = 3 y(1) = x(0)h(1) + x(1)h(0) = 1 \cdot 1 + 2 \cdot 1 = 3 y(1)=x(0)h(1)+x(1)h(0)=1⋅1+2⋅1=3
- y ( 2 ) = x ( 0 ) h ( 2 ) + x ( 1 ) h ( 1 ) + x ( 2 ) h ( 0 ) = 1 ⋅ 0 + 2 ⋅ 1 + 3 ⋅ 1 = 5 y(2) = x(0)h(2) + x(1)h(1) + x(2)h(0) = 1 \cdot 0 + 2 \cdot 1 + 3 \cdot 1 = 5 y(2)=x(0)h(2)+x(1)h(1)+x(2)h(0)=1⋅0+2⋅1+3⋅1=5
- y ( 3 ) = x ( 1 ) h ( 2 ) + x ( 2 ) h ( 1 ) = 2 ⋅ 0 + 3 ⋅ 1 = 3 y(3) = x(1)h(2) + x(2)h(1) = 2 \cdot 0 + 3 \cdot 1 = 3 y(3)=x(1)h(2)+x(2)h(1)=2⋅0+3⋅1=3
- 对于其他 n n n 值, y ( n ) = 0 y(n)=0 y(n)=0。
所以, y ( n ) = { 1 , 3 , 5 , 3 } y(n) = \{1, 3, 5, 3\} y(n)={1,3,5,3} (从 n = 0 n=0 n=0 开始)。
4. 递推法求解差分方程和单位脉冲响应:
差分方程: y ( n ) − 0.5 y ( n − 1 ) = x ( n ) y(n) - 0.5y(n-1) = x(n) y(n)−0.5y(n−1)=x(n)
a) 求单位脉冲响应 h ( n ) h(n) h(n):令 x ( n ) = δ ( n ) x(n) = \delta(n) x(n)=δ(n),且初始条件为零(即 y ( − 1 ) = 0 y(-1)=0 y(−1)=0)。
将方程改写为递推形式: y ( n ) = 0.5 y ( n − 1 ) + x ( n ) y(n) = 0.5y(n-1) + x(n) y(n)=0.5y(n−1)+x(n)。
- n = 0 n=0 n=0 时: h ( 0 ) = 0.5 h ( − 1 ) + δ ( 0 ) = 0.5 ⋅ 0 + 1 = 1 h(0) = 0.5h(-1) + \delta(0) = 0.5 \cdot 0 + 1 = 1 h(0)=0.5h(−1)+δ(0)=0.5⋅0+1=1
- n = 1 n=1 n=1 时: h ( 1 ) = 0.5 h ( 0 ) + δ ( 1 ) = 0.5 ⋅ 1 + 0 = 0.5 h(1) = 0.5h(0) + \delta(1) = 0.5 \cdot 1 + 0 = 0.5 h(1)=0.5h(0)+δ(1)=0.5⋅1+0=0.5
- n = 2 n=2 n=2 时: h ( 2 ) = 0.5 h ( 1 ) + δ ( 2 ) = 0.5 ⋅ 0.5 + 0 = 0.25 h(2) = 0.5h(1) + \delta(2) = 0.5 \cdot 0.5 + 0 = 0.25 h(2)=0.5h(1)+δ(2)=0.5⋅0.5+0=0.25
- n = 3 n=3 n=3 时: h ( 3 ) = 0.5 h ( 2 ) + δ ( 3 ) = 0.5 ⋅ 0.25 + 0 = 0.125 h(3) = 0.5h(2) + \delta(3) = 0.5 \cdot 0.25 + 0 = 0.125 h(3)=0.5h(2)+δ(3)=0.5⋅0.25+0=0.125
- n = 4 n=4 n=4 时: h ( 4 ) = 0.5 h ( 3 ) + δ ( 4 ) = 0.5 ⋅ 0.125 + 0 = 0.0625 h(4) = 0.5h(3) + \delta(4) = 0.5 \cdot 0.125 + 0 = 0.0625 h(4)=0.5h(3)+δ(4)=0.5⋅0.125+0=0.0625
所以, h ( 0 ) = 1 , h ( 1 ) = 0.5 , h ( 2 ) = 0.25 , h ( 3 ) = 0.125 , h ( 4 ) = 0.0625 h(0)=1, h(1)=0.5, h(2)=0.25, h(3)=0.125, h(4)=0.0625 h(0)=1,h(1)=0.5,h(2)=0.25,h(3)=0.125,h(4)=0.0625。
(事实上, h ( n ) = ( 0.5 ) n u ( n ) h(n) = (0.5)^n u(n) h(n)=(0.5)nu(n))
b) 判断该系统是否稳定,是否因果。
- 因果性: 从 h ( n ) = ( 0.5 ) n u ( n ) h(n) = (0.5)^n u(n) h(n)=(0.5)nu(n) 可以看出,当 n < 0 n<0 n<0 时, h ( n ) = 0 h(n)=0 h(n)=0。所以系统是因果的。
(根据差分方程,当前输出 y ( n ) y(n) y(n) 只依赖于当前输入 x ( n ) x(n) x(n) 和过去的输出 y ( n − 1 ) y(n-1) y(n−1),因此也是因果的。) - 稳定性: 检查单位脉冲响应是否绝对可和:
∑ n = − ∞ ∞ ∣ h ( n ) ∣ = ∑ n = 0 ∞ ∣ ( 0.5 ) n ∣ = ∑ n = 0 ∞ ( 0.5 ) n \sum_{n=-\infty}^{\infty} |h(n)| = \sum_{n=0}^{\infty} |(0.5)^n| = \sum_{n=0}^{\infty} (0.5)^n ∑n=−∞∞∣h(n)∣=∑n=0∞∣(0.5)n∣=∑n=0∞(0.5)n
这是一个几何级数求和,当公比 ∣ 0.5 ∣ < 1 |0.5|<1 ∣0.5∣<1 时,和为 1 1 − 0.5 = 1 0.5 = 2 \frac{1}{1-0.5} = \frac{1}{0.5} = 2 1−0.51=0.51=2。
因为 ∑ n = − ∞ ∞ ∣ h ( n ) ∣ = 2 < ∞ \sum_{n=-\infty}^{\infty} |h(n)| = 2 < \infty ∑n=−∞∞∣h(n)∣=2<∞,所以系统是稳定的。
结论:稳定且因果。















)



