本文介绍了基于W5500芯片的ARP协议实现方法,详细阐述了ARP请求与回复的工作机制。ARP协议通过广播请求和单播回复实现IP地址与MAC地址的映射,确保局域网设备间的可靠通信。文章提供了完整的STM32F10x开发环境下的代码实现,包括网络初始化、SPI接口配置、ARP请求发送和回复处理等核心功能模块。测试结果表明,该系统能成功完成ARP地址解析,准确获取目标设备的MAC地址,为后续网络通信奠定基础。
1、ARP基础知识
ARP(Address Resolution Protocol)的核心功能是通过IP地址解析其对应的MAC地址,以实现网络层与链路层地址的映射,确保数据包在局域网内能准确传输。
ARP通过广播请求和单播回复,帮助设备在网络中识别彼此的硬件地址,从而实现可靠的数据传输。
在局域网中,设备间的通信依赖数据链路层的MAC地址,而网络层使用的是IP地址,因此,当W5500往外发送信息时,只知道对方的IP地址,还是不知道发送给谁。因为一个IP地址可以对应多个MAC地址,因此链路层只能通过MAC地址识别来是识别设备。
"255.255.255.255"是有限广播地址,用于向本地网络中的所有设备发送广播消息。任何发往该地址的数据包都会被同一网络段内的所有设备接收。
"0.0.0.0"在默认路由中,"0.0.0.0"表示所有IP地址。一个程序选择监听"0.0.0.0",则表示要监听所有可用的IP。
单播回复:与"目标IP地址"匹配的设备会直接将"ARP回复"发送给"ARP请求者",而不是广播到整个网络。
2、ARP请求的过程
1)、"ARP请求者"发起ARP请求:
当主机A想要发送数据给主机B,但A只知道目标IP地址而不知道B的MAC地址时,它会广播一个"ARP请求"到网络上的所有设备。
2)、与目的IP地址匹配的设备发送"ARP回复":
主机B收到"ARP请求"后,会检查请求中的"目标IP地址"是否与自己的IP地址相匹配。如果匹配,它会构造一个"ARP回复",
其中包含自己的MAC地址,然后直接发送给主机A。
3)、"ARP请求者"接收"ARP回复":
主机A收到"ARP回复"后,它会记录"目标IP地址"和与之对应的"MAC地址",然后保存到ARP缓存中。
这样,以后就不需要再次发送ARP查询,就可以直接发送数据帧到主机B。
重点学习下面的结构:
typedef struct _ARPMSG
{
uint8_t dst_mac[6]; //以太网帧中的广播地址,ff.ff.ff.ff.ff.ff
uint8_t src_mac[6]; //发送端MAC地址
uint16_t msg_type; // ARP (0x0806)
uint16_t hw_type; // 硬件类型为以太网(0x0001)
uint16_t pro_type; // 协议类型为IP地址(0x0800)
uint8_t hw_size; // 硬件长度为6
uint8_t pro_size; //协议地址长度为4
uint16_t opcode; //ARP请求为0x0001,ARP应答为0x0002
uint8_t sender_mac[6]; //发送端MAC地址
uint8_t sender_ip[4]; //发送端IP地址
uint8_t tgt_mac[6]; //目的MAC地址,00.00.00.00.00.00
uint8_t tgt_ip[4]; //目的IP地址
uint8_t trailer[22]; // All zeros
} ARPMSG;
3、ioLibrary库下载地址
下载地址:https://gitee.com/wiznet-hk/STM32F10x_W5500_Examples
源文件下载地址:https://gitee.com/wiznet-hk
密码生成工具:https://open.iot.10086.cn/doc/iot_platform/images/tools/token.exe
源工程只能发送ARP请求,对于外部请求,没有写ARP回复。我做了修正。
4、W5500_Variable.c
#include "W5500_Variable.h"
#include "socket.h" // Just include one header for WIZCHIP
#include "stdio.h" //getchar(),putchar(),scanf(),printf(),puts(),gets(),sprintf()
#include "string.h" //使能strcpy(),strlen(),memset()//W5500的网络参数
//本地物理地址:00 08 DC 11 11 11
//本地IP地址:192.168.1.199
//本地子网掩码: 255.255.255.0
//本地网关:192.168.1.1
//DNS服务器IP地址:8.8.8.8
//程序固化IP地址
/* network information */
wiz_NetInfo net_info = {{0x00, 0x08, 0xdc,0x11, 0x11, 0x11},{192, 168, 1, 199},{255,255,255,0},{192, 168, 1, 1},{8,8,8,8},//DNS服务器IPNETINFO_STATIC}; //静态IP,程序固化IP地址
wiz_NetInfo net_info;uint16_t Local_Port=4000;//W5500本地端口为4000uint8_t ethernet_buf[ETHERNET_BUF_MAX_SIZE] = {0};uint8_t Dest_IP[4] = {192, 168, 1, 190};
uint8_t Dest_IP_mqtt_wxkj_com[4] = {199,59,243,228};
uint8_t Dest_MAC[6];//用来保存Dest_IP[]对应的MAC地址
uint16_t Dest_Port=3000;5、W5500_Variable.h
#ifndef _W5500_Variable_H
#define _W5500_Variable_H#include "stm32f10x.h"//使能uint8_t,uint16_t,uint32_t,uint64_t,int8_t,int16_t,int32_t,int64_t
#include "wizchip_conf.h"#define TCP_SOCKET0 0 //W5500使用SOCKET通道0作为TCPextern wiz_NetInfo net_info;
extern uint16_t Local_Port;//W5500本地端口#define ETHERNET_BUF_MAX_SIZE (1024 * 2)
extern uint8_t ethernet_buf[ETHERNET_BUF_MAX_SIZE];extern uint8_t Dest_IP[4];
extern uint8_t Dest_IP_mqtt_wxkj_com[4];
extern uint8_t Dest_MAC[6];
extern uint16_t Dest_Port;#endif6、wiz_platform.c
#include "wiz_platform.h"
#include <stdio.h>
#include <stdint.h>
#include "wizchip_conf.h"
#include "wiz_interface.h"
#include "stm32f10x.h"
#include "delay.h"//函数功能:SPI1初始化
void wiz_spi_init(void)
{GPIO_InitTypeDef GPIO_InitStructure;SPI_InitTypeDef SPI_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA的外设时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE); //使能SPI1的外设时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //选择PIN5,是SPI1的SCLGPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //选择引脚为复用推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置引脚的最高工作速率为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure); //根据GPIO_InitStructure结构指针所指向的参数配置PA5引脚 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //选择PIN6,是SPI1的MISOGPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //选择引脚为输入悬浮GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置引脚的最高工作速率为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure); //根据GPIO_InitStructure结构指针所指向的参数配置PA6引脚GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //选择PIN7,是SPI1的MOSIGPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //选择引脚为复用推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置引脚的最高工作速率为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure); //根据GPIO_InitStructure结构指针所指向的参数配置PA7引脚GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; //选择PIN3,是W5500的片选脚CSGPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择引脚为推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置引脚的最高工作速率为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure); //根据GPIO_InitStructure结构指针所指向的参数配置PA3引脚//设置SPI1的工作模式SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;//SPI设置为双线双向全双工SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置为主SPISPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI发送接收为8位帧结构SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //设置SCK空闲时钟为低电平SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //数据捕获于第1个时钟沿//SCK空闲时钟为低电平,数据捕获于第1个时钟沿,这样就设置了SPI从机在下降沿采集数据了//SPI从机在下降沿采集数据,这要求CPU必须在SCK上升沿输出位值,在SCK为高电平时达到稳定,为数据采集做好准备SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //设置NSS输出由SSI位控制SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2;//设置波特率预分频值为2SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //设置数据传输先从MSB位开始SPI_InitStructure.SPI_CRCPolynomial = 7; //使用CRC7校验SPI_Init(SPI1, &SPI_InitStructure);SPI_Cmd(SPI1, ENABLE); //使能SPI外设
}//函数功能:初始化W5500的RST引脚和INT引脚
void wiz_rst_int_init(void)
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd ( RCC_APB2Periph_GPIOC, ENABLE ); //使能GPIOC外设的高速时钟/* W5500_RST引脚初始化配置(PC5) */GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //选择PC5为W5500的RST引脚GPIO_InitStructure.GPIO_Speed=GPIO_Speed_10MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(GPIOC, &GPIO_InitStructure);GPIO_ResetBits(GPIOC, GPIO_Pin_5);RCC_APB2PeriphClockCmd ( RCC_APB2Periph_GPIOC, ENABLE ); //使能GPIOC外设的高速时钟/* W5500_INT引脚初始化配置(PC4) */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; //选择PC4为W5500的INT引脚GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_Init(GPIOC, &GPIO_InitStructure);
}//函数功能:使能SPI片选
void wizchip_select(void)
{GPIO_ResetBits(GPIOA,GPIO_Pin_4);//输出低电平表示选择W5500
}//函数功能:不使能SPI片选
void wizchip_deselect(void)
{GPIO_SetBits(GPIOA,GPIO_Pin_4);//输出高电平表示不选择W5500
}//函数功能:通过SPI,将dat的值发送给W5500
void wizchip_write_byte(uint8_t dat)
{while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET){//检查SPI1的发送完成标志是否建立}SPI_I2S_SendData(SPI1, dat);//通过SPI,将dat发送给W5500while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET){//检查SPI1的接收完成标志是否建立}SPI_I2S_ReceiveData(SPI1);//读SPI接收数据寄存器
}//函数功能:通过SPI读取1个字节,并返回
uint8_t wizchip_read_byte(void)
{while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET){//检查SPI1的发送完成标志是否建立}SPI_I2S_SendData(SPI1,0xffff);//发送16个移位时钟,为接收数据作准备while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET){//检查SPI1的接收完成标志是否建立}return SPI_I2S_ReceiveData(SPI1);//读SPI接收数据寄存器
}//函数功能:通过SPI,将buf[]中的前len个字节发送给W5500
void wizchip_write_buff(uint8_t *buf, uint16_t len)
{uint16_t idx = 0;for (idx = 0; idx < len; idx++){wizchip_write_byte(buf[idx]);//通过SPI,将buf[idx]的值发送给W5500}
}//函数功能:通过SPI读取len个字节,保存到buf[]中
void wizchip_read_buff(uint8_t *buf, uint16_t len)
{uint16_t idx = 0;for (idx = 0; idx < len; idx++){buf[idx] = wizchip_read_byte();//通过SPI读取1个字节,保存到buf[idx]中}
}//函数功能:W5500使用RST引脚复位
void wizchip_reset(void)
{GPIO_SetBits(GPIOC, GPIO_Pin_5);//复位引脚拉高delay_ms(10);GPIO_ResetBits(GPIOC, GPIO_Pin_5);//复位引脚拉低delay_ms(10);GPIO_SetBits(GPIOC, GPIO_Pin_5);//复位引脚拉高delay_ms(10);
}//函数功能:注册SPI片选函数,单字节读写函数和多字节读写函数
//1.注册SPI片选信号函数
//2.注册SPI读写单一字节函数
//3.注册SPI读写多字节函数
void wizchip_spi_cb_reg(void)
{reg_wizchip_cs_cbfunc(wizchip_select, wizchip_deselect);//注册SPI片选信号函数reg_wizchip_spi_cbfunc(wizchip_read_byte, wizchip_write_byte);//注册SPI读写单一字节函数reg_wizchip_spiburst_cbfunc(wizchip_read_buff, wizchip_write_buff);//注册SPI读写多字节函数
}//函数功能:配置TIM2每毫秒中断一次
void wiz_timer_init(void)
{TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);TIM_TimeBaseStructure.TIM_Period = 1000 - 1;TIM_TimeBaseStructure.TIM_Prescaler = 72 - 1;TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);TIM_ClearFlag(TIM2, TIM_FLAG_Update);TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);TIM_Cmd(TIM2, ENABLE);
}//函数功能:使能TIM2中断
void wiz_tim_irq_enable(void)
{TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
}//函数功能:不使能TIM2中断
void wiz_tim_irq_disable(void)
{TIM_ITConfig(TIM2, TIM_IT_Update, DISABLE);
}//函数功能:TIM2每毫秒中断一次
void TIM2_IRQHandler(void)
{static uint32_t wiz_timer_1ms_count = 0;if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET){wiz_timer_1ms_count++;if (wiz_timer_1ms_count >= 1000){wiz_timer_1ms_count = 0;}TIM_ClearITPendingBit(TIM2, TIM_IT_Update);}
}
7、wiz_interface.c
#include "wiz_interface.h"
#include "wiz_platform.h"
#include "wizchip_conf.h"
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "delay.h"
#include "W5500_Variable.h"
#include "socket.h"void wizchip_initialize(void);
void TCP_network_init(uint8_t *ethernet_buff, wiz_NetInfo *conf_info);void wizchip_version_check(void);
void print_network_information(void);
void wiz_phy_link_check(void);
void wiz_print_phy_info(void);#define W5500_VERSION 0x04
//函数功能:读取芯片版本号码,并检查是否正确
void wizchip_version_check(void)
{uint8_t error_count = 0;while (1){delay_ms(1000);if (getVERSIONR() != W5500_VERSION){//读取芯片版本号码error_count++;if (error_count > 5){printf("error, %s version is 0x%02x, but read %s version value = 0x%02x\r\n", _WIZCHIP_ID_, W5500_VERSION, _WIZCHIP_ID_, getVERSIONR());while (1);}}else{break;}}
}/*** @brief Print PHY information*/
//函数功能:
//1.读PHY配置寄存器的bit1和bit2
//2.串口输出当前网速为100M/10M
//3.串口输出当前以太网采用全双工通讯/半双工通讯
void wiz_print_phy_info(void)
{uint8_t get_phy_conf;get_phy_conf = getPHYCFGR();//读PHY配置寄存器printf("The current Mbtis speed : %dMbps\r\n", get_phy_conf & 0x02 ? 100 : 10);//PHY配置寄存器,bit1=1表示网速为100M,bit1=0表示网速为10Mprintf("The current Duplex Mode : %s\r\n", get_phy_conf & 0x04 ? "Full-Duplex" : "Half-Duplex");//PHY配置寄存器,bit2=1表示以太网采用全双工通讯,bit2=0表示以太网采用半双工通讯
}//函数功能:
//读PHY配置寄存器的bit[2:0]
//bit0=1表示W5500连接到局域网
//bit1=1表示当前网速为100M,否则为10M
//bit2=1表示当前以太网采用全双工通讯,否则为半双工通讯
void wiz_phy_link_check(void)
{uint8_t phy_link_status;do{delay_ms(1000);ctlwizchip(CW_GET_PHYLINK, (void *)&phy_link_status);//读PH配置寄存器的bit0,保存到phy_link_status中,为1表示连接到局域网if (phy_link_status == PHY_LINK_ON){//W5500连接到局域网printf("PHY link\r\n");wiz_print_phy_info();//1.读PHY配置寄存器的bit1和bit2//2.串口输出当前网速为100M/10M//3.串口输出当前以太网采用全双工通讯/半双工通讯}else{printf("PHY no link\r\n");}} while (phy_link_status == PHY_LINK_OFF);
}//1.注册SPI片选函数,单字节读写函数和多字节读写函数
//2.W5500使用RST引脚复位
//3.读取芯片版本号码,并检查是否正确
//4.读PHY配置寄存器的bit[2:0],bit0=1表示W5500连接到局域网
//bit1=1表示当前网速为100M,否则为10M
//bit2=1表示当前以太网采用全双工通讯,否则为半双工通讯
void wizchip_initialize(void)
{wizchip_spi_cb_reg();//注册SPI片选函数,单字节读写函数和多字节读写函数wizchip_reset();//W5500使用RST引脚复位wizchip_version_check();//读取芯片版本号码,并检查是否正确//Read version registerwiz_phy_link_check();//读PHY配置寄存器的bit[2:0]//bit0=1表示W5500连接到局域网//bit1=1表示当前网速为100M,否则为10M//bit2=1表示当前以太网采用全双工通讯,否则为半双工通讯
}//函数功能:读本地网络参数:MAC地址,GW网关,SN子网掩码,本地IP地址,DNS服务器IP地址,DHCP,然后从串口输出
void print_network_information(void)
{wiz_NetInfo net_info;wizchip_getnetinfo(&net_info);// Get chip configuration information//读本地网络参数:MAC地址,GW网关,SN子网掩码,本地IP地址,DNS服务器IP地址,DHCPif (net_info.dhcp == NETINFO_DHCP){printf("====================================================================================================\r\n");printf(" %s network configuration : DHCP\r\n\r\n", _WIZCHIP_ID_);}else{printf("====================================================================================================\r\n");printf(" %s network configuration : static\r\n\r\n", _WIZCHIP_ID_);}printf(" MAC : %02X:%02X:%02X:%02X:%02X:%02X\r\n", net_info.mac[0], net_info.mac[1], net_info.mac[2], net_info.mac[3], net_info.mac[4], net_info.mac[5]);printf(" IP : %d.%d.%d.%d\r\n", net_info.ip[0], net_info.ip[1], net_info.ip[2], net_info.ip[3]);printf(" Subnet Mask : %d.%d.%d.%d\r\n", net_info.sn[0], net_info.sn[1], net_info.sn[2], net_info.sn[3]);printf(" Gateway : %d.%d.%d.%d\r\n", net_info.gw[0], net_info.gw[1], net_info.gw[2], net_info.gw[3]);printf(" DNS : %d.%d.%d.%d\r\n", net_info.dns[0], net_info.dns[1], net_info.dns[2], net_info.dns[3]);printf("====================================================================================================\r\n\r\n");
}//函数功能:设置本地网络信息
//1.使用"默认网络参数"设置本地网络参数:MAC地址,GW网关,SN子网掩码,本地IP地址,DNS服务器IP地址,DHCP
//2.读本地网络参数:MAC地址,GW网关,SN子网掩码,本地IP地址,DNS服务器IP地址,DHCP,然后从串口输出
void TCP_network_init(uint8_t *ethernet_buff, wiz_NetInfo *conf_info)
{wizchip_setnetinfo(conf_info);//设置本地网络参数:MAC地址,GW网关,SN子网掩码,本地IP地址,DNS服务器IP地址,DHCP模式print_network_information();//读本地网络参数:MAC地址,GW网关,SN子网掩码,本地IP地址,DNS服务器IP地址,DHCP模式,然后从串口输出
}
8、Test_ARP.c
#include "Test_ARP.h"
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "socket.h"
#include "wizchip_conf.h"
#include <stdlib.h>
#include "W5500_Variable.h"
#include "delay.h"uint8_t W5500_ARPReplyFlag;
uint8_t W5500_ARPRequestFlag;void Print_W5500_ethernet_buf(uint16_t len);
void W5500_Send_ARP_Request(uint8_t sn, uint16_t remotePort, uint8_t *remote_ip,uint8_t *buf);
uint8_t W5500_Receive_ARP_Reply(uint8_t sn, uint8_t *remote_ip,uint8_t *buff, uint16_t rlen);
uint8_t W5500_Receive_ARP_Request(uint8_t sn, uint8_t *buff, uint16_t rlen);
void W5500_Send_ARP_Reply(uint8_t sn,uint8_t *buf);void ARP_Init(uint8_t sn);
void W5500_Read_Remote_MAC(uint8_t sn, uint8_t *buf, uint8_t *dest_ip);
void RemoteComputer_Read_W5500_MAC(uint8_t sn, uint8_t *buf);//函数功能:打印ethernet_buf[]的数据;
void Print_W5500_ethernet_buf(uint16_t len)
{uint16_t i;printf("\r\nW5500:"); //将"\r\nW5500:"发送到调试串口,由PC显示;for(i=0;i<len;i++){printf("%02X",ethernet_buf[i]);printf(" ");}printf("\r\n");//将"\r\n"发送到调试串口,由PC显示;
}//函数功能:将d的高8位和低8位交换,并返回交换后的值
static uint16_t swaps(uint16_t d)
{uint16_t ret = 0;ret = (d & 0xFF) << 8;ret |= ((d >> 8) & 0xFF);return ret;
}/*
什么是小端?什么是大端?
小端存储模式,是指"数据的低位"保存在"内存的低地址"中,而"数据的高位"保存在"内存的高地址"中。
大端存储模式,是指"数据的低位"保存在"内存的高地址"中,而"数据的高位"保存在"内存的低地址"中;
*/
//函数功能:将小端存储模式中的数据转换为大端存储模式中的数据,因为MDK-ARM是小端存储模式
//TCP/IP网络字节格式数据是大端存储模式
static uint16_t htons(uint16_t hostshort)
{/**< A 16-bit number in host byte order. */
#if (SYSTEM_ENDIAN == _ENDIAN_LITTLE_)//表示系统采用小端存储模式。return swaps(hostshort);
#elsereturn hostshort;
#endif
}//函数功能:发送ARP请求
//sn表示SOCKET通道sn
//port为本地端口
//remote_ip[]为保存IP地址的数据
void W5500_Send_ARP_Request(uint8_t sn, uint16_t remotePort, uint8_t *remote_ip,uint8_t *buf)
{uint16_t len;uint16_t i;uint8_t broadcast_addr[4] = {0xff, 0xff, 0xff, 0xff};//ARP广播地址ARPMSG *pMSG;pMSG = (ARPMSG *)buf;for (i = 0; i < 6; i++){pMSG->dst_mac[i] = 0xff;//生成以太网帧中的广播地址,Broadcast address in an Ethernet framepMSG->tgt_mac[i] = 0x00;//生成目的MAC地址if (i < 4)//生成目的IP地址{pMSG->tgt_ip[i] = remote_ip[i];}}getSHAR(pMSG->src_mac); //读本地网络参数:MAC地址getSHAR(pMSG->sender_mac); //读本地发送端MAC地址,Fill in the MAC address of the sender in ARPgetSIPR(pMSG->sender_ip); //读本地发送端IP地址 Enter the IP address of the sender in ARPpMSG->msg_type = htons(ARP_TYPE); //添加ARP类型,ARP typepMSG->hw_type = htons(ETHER_TYPE); //添加以太网,Ethernet typepMSG->pro_type = htons(PRO_TYPE); //添加协议类型为IP地址pMSG->hw_size = HW_SIZE; //添加硬件长度为6pMSG->pro_size = PRO_SIZE; //添加协议地址长度为4pMSG->opcode = htons(ARP_REQUEST); //ARP请求为0x0001,ARP应答为0x0002,这里设置为ARP请求len=sendto(sn, (uint8_t *)buf, sizeof(ARPMSG), broadcast_addr, remotePort);//ARP以广播的形式发送请求报文//将W5500_Send_ARPMSG通过SOCKET通道sn发送给广播地址为broadcast_addr,并指定远程端口为remotePortif ( len!= sizeof(ARPMSG)){printf("Fail to send arp request packet.\r\n");}else{if (pMSG->opcode == htons(ARP_REQUEST)){printf("Who has %d.%d.%d.%d ? Tell %d.%d.%d.%d\r\n", pMSG->tgt_ip[0], pMSG->tgt_ip[1], pMSG->tgt_ip[2], pMSG->tgt_ip[3],pMSG->sender_ip[0], pMSG->sender_ip[1], pMSG->sender_ip[2], pMSG->sender_ip[3]);}else{printf("Opcode has wrong value. check opcode!\r\n");}}
}//函数功能:接收ARP应答
//sn表示SOCKET通道sn
//buff[]用来保存接收到的数据
//rlen为要接收的数据长度
uint8_t W5500_Receive_ARP_Reply(uint8_t sn, uint8_t *remote_ip,uint8_t *buff, uint16_t rlen)
{int32_t len;uint8_t i;uint8_t arp_Flag;ARPMSG *pMSG;len=recvfrom(sn,(uint8_t *)buff, rlen, remote_ip, &Dest_Port);//接收来自IP地址为remote_ip的数据,并将读到的端口数值保存到buff中printf("\r\nlen=%d\r\n",len);if(len>0){printf("Receive IP: %d.%d.%d.%d\r\n",remote_ip[0],remote_ip[1],remote_ip[2],remote_ip[3]);printf("Receive Port: %d\r\n",Dest_Port);Print_W5500_ethernet_buf(len);}if (buff[12] == ARP_TYPE_HI && buff[13] == ARP_TYPE_LO)//判断是否为ARP协议数据{pMSG = (ARPMSG *)buff;if ((pMSG->opcode) == htons(ARP_REPLY)){//ARP应答为0x0002arp_Flag = 1;for (i = 0; i < 4; i++){if (pMSG->tgt_ip[i] != net_info.ip[i])//判断这个IP地址是否正确{arp_Flag = 0;break;}}if(arp_Flag==1){printf("\r\ndst_mac is %.2X.%.2X.%.2X.%.2X.%.2X.%.2X\r\n",pMSG->dst_mac[0], pMSG->dst_mac[1], pMSG->dst_mac[2], pMSG->dst_mac[3],pMSG->dst_mac[4], pMSG->dst_mac[5]);printf("src_mac is %.2X.%.2X.%.2X.%.2X.%.2X.%.2X\r\n",pMSG->src_mac[0], pMSG->src_mac[1], pMSG->src_mac[2], pMSG->src_mac[3],pMSG->src_mac[4], pMSG->src_mac[5]);printf( "msg_type=0x%04X\r\n",htons(pMSG->msg_type) );printf( "hw_type=0x%04X\r\n",htons(pMSG->hw_type) );printf( "pro_type=0x%04X\r\n",htons(pMSG->pro_type) );printf( "hw_size=0x%02X\r\n",pMSG->hw_size );printf( "pro_size=0x%02X\r\n",pMSG->pro_size );printf( "opcode=0x%04X\r\n",htons(pMSG->opcode) );printf("%d.%d.%d.%d is at %.2X.%.2X.%.2X.%.2X.%.2X.%.2X\r\n",pMSG->sender_ip[0], pMSG->sender_ip[1], pMSG->sender_ip[2], pMSG->sender_ip[3],pMSG->sender_mac[0], pMSG->sender_mac[1], pMSG->sender_mac[2], pMSG->sender_mac[3],pMSG->sender_mac[4], pMSG->sender_mac[5]);printf("%d.%d.%d.%d is at %.2X.%.2X.%.2X.%.2X.%.2X.%.2X\r\n",pMSG->tgt_ip[0], pMSG->tgt_ip[1], pMSG->tgt_ip[2], pMSG->tgt_ip[3],pMSG->tgt_mac[0], pMSG->tgt_mac[1], pMSG->tgt_mac[2], pMSG->tgt_mac[3],pMSG->tgt_mac[4], pMSG->tgt_mac[5]);for (i = 0; i < 4; i++)//保存ARP请求方的IP地址{Dest_IP[i]=pMSG->sender_ip[i];}for (i = 0; i < 6; i++)//保存ARP请求方的MAC地址{Dest_MAC[i]=pMSG->sender_mac[i];}printf("%d.%d.%d.%d is at %.2X.%.2X.%.2X.%.2X.%.2X.%.2X\r\n",Dest_IP[0], Dest_IP[1], Dest_IP[2], Dest_IP[3],Dest_MAC[0], Dest_MAC[1], Dest_MAC[2], Dest_MAC[3],Dest_MAC[4], Dest_MAC[5]);}}else arp_Flag=0;}else{arp_Flag=0;printf("This message is not ARP reply: opcode is not 0x02!\r\n");}return (arp_Flag);
}//函数功能:保存ARP请求方的IP地址到Dest_IP[]中,保存ARP请求方的MAC地址到Dest_MAC[]中
//sn表示SOCKET通道sn
//buff[]用来保存接收到的数据
//rlen为要接收的数据长度
uint8_t W5500_Receive_ARP_Request(uint8_t sn, uint8_t *buff, uint16_t rlen)
{int32_t len;uint8_t broadcast_addr[4] = {0xff, 0xff, 0xff, 0xff};//ARP广播地址uint8_t i;uint8_t arp_Flag;ARPMSG *pMSG;arp_Flag = 0;//假定没有收到ARP请求len=recvfrom(sn,(uint8_t *)buff, rlen, broadcast_addr, &Dest_Port);//接收来自IP地址为remote_ip的数据,并将读到的端口数值保存到buff中printf("\r\nlen=%d\r\n",len);if(len>0){printf("Receive IP: %d.%d.%d.%d\r\n",broadcast_addr[0],broadcast_addr[1],broadcast_addr[2],broadcast_addr[3]);printf("Receive Port: %d\r\n",Dest_Port);Print_W5500_ethernet_buf(len);}if (buff[12] == ARP_TYPE_HI && buff[13] == ARP_TYPE_LO)//判断是否为ARP协议数据{pMSG = (ARPMSG *)buff;if ((pMSG->opcode) == htons(ARP_REQUEST)){//ARP请求为0x0001arp_Flag = 1;//收到ARP请求printf("\r\ndst_mac is %.2X.%.2X.%.2X.%.2X.%.2X.%.2X\r\n",pMSG->dst_mac[0], pMSG->dst_mac[1], pMSG->dst_mac[2], pMSG->dst_mac[3],pMSG->dst_mac[4], pMSG->dst_mac[5]);printf("src_mac is %.2X.%.2X.%.2X.%.2X.%.2X.%.2X\r\n",pMSG->src_mac[0], pMSG->src_mac[1], pMSG->src_mac[2], pMSG->src_mac[3],pMSG->src_mac[4], pMSG->src_mac[5]);printf( "msg_type=0x%04X\r\n",htons(pMSG->msg_type) );printf( "hw_type=0x%04X\r\n",htons(pMSG->hw_type) );printf( "pro_type=0x%04X\r\n",htons(pMSG->pro_type) );printf( "hw_size=0x%02X\r\n",pMSG->hw_size );printf( "pro_size=0x%02X\r\n",pMSG->pro_size );printf( "opcode=0x%04X\r\n",htons(pMSG->opcode) );printf("%d.%d.%d.%d is at %.2X.%.2X.%.2X.%.2X.%.2X.%.2X\r\n",pMSG->sender_ip[0], pMSG->sender_ip[1], pMSG->sender_ip[2], pMSG->sender_ip[3],pMSG->sender_mac[0], pMSG->sender_mac[1], pMSG->sender_mac[2], pMSG->sender_mac[3],pMSG->sender_mac[4], pMSG->sender_mac[5]);printf("%d.%d.%d.%d is at %.2X.%.2X.%.2X.%.2X.%.2X.%.2X\r\n",pMSG->tgt_ip[0], pMSG->tgt_ip[1], pMSG->tgt_ip[2], pMSG->tgt_ip[3],pMSG->tgt_mac[0], pMSG->tgt_mac[1], pMSG->tgt_mac[2], pMSG->tgt_mac[3],pMSG->tgt_mac[4], pMSG->tgt_mac[5]);for (i = 0; i < 4; i++)//保存ARP请求方的IP地址{Dest_IP[i]=pMSG->sender_ip[i];}for (i = 0; i < 6; i++)//保存ARP请求方的MAC地址{Dest_MAC[i]=pMSG->sender_mac[i];}}}else{printf("This message is not ARP reply: opcode is not 0x02!\r\n");}//如果只是测试,可以将下面的for循环屏蔽
//如果是正式使用,则要判断ARP请求是不是我,此时for循环就需要了。for (i = 0; i < 4; i++)//查看目的IP地址是不是这个W5500{if (pMSG->tgt_ip[i] != net_info.ip[i])//判断这个IP地址是否正确{arp_Flag = 0;break;}}return (arp_Flag);
}//函数功能:发送ARP应答
//sn表示SOCKET通道sn
//port为本地端口
//remote_ip[]为保存IP地址的数据
void W5500_Send_ARP_Reply(uint8_t sn,uint8_t *buf)
{uint16_t len;uint16_t i;ARPMSG *pMSG;
// uint8_t Dest_IP[4] = {192, 168, 1, 201};pMSG = (ARPMSG *)buf;for (i = 0; i < 6; i++){pMSG->dst_mac[i] = Dest_MAC[i];//生成以太网帧中的广播地址,Broadcast address in an Ethernet framepMSG->tgt_mac[i] = Dest_MAC[i];//生成目的MAC地址if (i < 4)//生成目的IP地址{pMSG->tgt_ip[i] = Dest_IP[i];}}getSHAR(pMSG->src_mac); //读本地网络参数:MAC地址getSHAR(pMSG->sender_mac); //读本地发送端MAC地址,Fill in the MAC address of the sender in ARPgetSIPR(pMSG->sender_ip); //读本地发送端IP地址 Enter the IP address of the sender in ARPpMSG->msg_type = htons(ARP_TYPE); //添加ARP类型,ARP typepMSG->hw_type = htons(ETHER_TYPE); //添加以太网,Ethernet typepMSG->pro_type = htons(PRO_TYPE); //添加协议类型为IP地址pMSG->hw_size = HW_SIZE; //添加硬件长度为6pMSG->pro_size = PRO_SIZE; //添加协议地址长度为4pMSG->opcode = htons(ARP_REPLY); //ARP请求为0x0001,ARP应答为0x0002,这里设置为ARP应答len=sendto(sn, (uint8_t *)buf, sizeof(ARPMSG), Dest_IP, Dest_Port);//将W5500_Send_ARPMSG通过SOCKET通道sn发送给广播地址为broadcast_addr,并指定远程端口为Dest_Portif ( len!= sizeof(ARPMSG)){printf("Fail to send arp request packet.\r\n");}else{printf("\r\ndst_mac is %.2X.%.2X.%.2X.%.2X.%.2X.%.2X\r\n",pMSG->dst_mac[0], pMSG->dst_mac[1], pMSG->dst_mac[2], pMSG->dst_mac[3],pMSG->dst_mac[4], pMSG->dst_mac[5]);printf("src_mac is %.2X.%.2X.%.2X.%.2X.%.2X.%.2X\r\n",pMSG->src_mac[0], pMSG->src_mac[1], pMSG->src_mac[2], pMSG->src_mac[3],pMSG->src_mac[4], pMSG->src_mac[5]);printf( "msg_type=0x%04X\r\n",htons(pMSG->msg_type) );printf( "hw_type=0x%04X\r\n",htons(pMSG->hw_type) );printf( "pro_type=0x%04X\r\n",htons(pMSG->pro_type) );printf( "hw_size=0x%02X\r\n",pMSG->hw_size );printf( "pro_size=0x%02X\r\n",pMSG->pro_size );printf( "opcode=0x%04X\r\n",htons(pMSG->opcode) );printf("%d.%d.%d.%d is at %.2X.%.2X.%.2X.%.2X.%.2X.%.2X\r\n",pMSG->sender_ip[0], pMSG->sender_ip[1], pMSG->sender_ip[2], pMSG->sender_ip[3],pMSG->sender_mac[0], pMSG->sender_mac[1], pMSG->sender_mac[2], pMSG->sender_mac[3],pMSG->sender_mac[4], pMSG->sender_mac[5]);printf("%d.%d.%d.%d is at %.2X.%.2X.%.2X.%.2X.%.2X.%.2X\r\n",pMSG->tgt_ip[0], pMSG->tgt_ip[1], pMSG->tgt_ip[2], pMSG->tgt_ip[3],pMSG->tgt_mac[0], pMSG->tgt_mac[1], pMSG->tgt_mac[2], pMSG->tgt_mac[3],pMSG->tgt_mac[4], pMSG->tgt_mac[5]);}
}//函数功能:将SOCKET通道sn配置为MACRAW模式
void ARP_Init(uint8_t sn)
{W5500_ARPReplyFlag=0;W5500_ARPRequestFlag=0;close(sn);socket(sn, Sn_MR_MACRAW, Local_Port, 0x00);//令SOCKET端口sn工作在MACRAW模式,并设置MACRAW模式端口为Local_Port
}//函数功能:读远程IP地址为remote_ip[]对应的的MAC地址
//sn表示SOCKET通道sn
//buf[]用来保存接收到的数据
//remote_ip[]为远程IP地址
void W5500_Read_Remote_MAC(uint8_t sn, uint8_t *buf, uint8_t *remote_ip)
{uint8_t Sn_SR_Value;uint16_t rlen = 0;uint16_t cnt = 0;while(W5500_ARPReplyFlag==0){Sn_SR_Value=getSn_SR(sn);//获取W5500SOCKET通道sn的状态寄存器switch (Sn_SR_Value){case SOCK_CLOSED:close(sn);socket(sn, Sn_MR_MACRAW, Local_Port, 0x00);//令SOCKET端口sn工作在MACRAW模式,并设置MACRAW模式端口为Local_Portbreak;case SOCK_MACRAW:W5500_Send_ARP_Request(sn, Dest_Port,remote_ip,buf);//发送ARP请求while (1){rlen = getSn_RX_RSR(sn);//getSn_RX_RSR()读S0OCKET通道sn的Sn_RX_RSR寄存器,获取该端口的接收缓冲区的数据长度if (rlen> 0){W5500_ARPReplyFlag=W5500_Receive_ARP_Reply(sn, remote_ip,buf, rlen);if(W5500_ARPReplyFlag==1) break;}if (cnt > 1000){printf("Request Time out.\r\n");cnt = 0;break;}else{cnt++;delay_ms(5);}}break;}}
}//函数功能:读远程IP地址为remote_ip[]对应的的MAC地址
//sn表示SOCKET通道sn
//buf[]用来保存接收到的数据
//remote_ip[]为远程IP地址
void RemoteComputer_Read_W5500_MAC(uint8_t sn, uint8_t *buf)
{uint8_t Sn_SR_Value;uint16_t rlen = 0;uint16_t cnt = 0;while(W5500_ARPRequestFlag==0){Sn_SR_Value=getSn_SR(sn);//获取W5500SOCKET通道sn的状态寄存器switch (Sn_SR_Value){case SOCK_CLOSED:close(sn);socket(sn, Sn_MR_MACRAW, Local_Port, 0x00);//令SOCKET端口sn工作在MACRAW模式,并设置MACRAW模式端口为Local_Portbreak;case SOCK_MACRAW:rlen = getSn_RX_RSR(sn);//getSn_RX_RSR()读S0OCKET通道sn的Sn_RX_RSR寄存器,获取该端口的接收缓冲区的数据长度if (rlen> 0){W5500_ARPRequestFlag=W5500_Receive_ARP_Request(sn, buf, rlen);//保存ARP请求方的IP地址到Dest_IP[]中,保存ARP请求方的MAC地址到Dest_MAC[]中if(W5500_ARPRequestFlag==1)W5500_Send_ARP_Reply(sn,buf);//发送ARP应答}if (cnt > 1000){W5500_ARPRequestFlag=2;//超时printf("Request Time out.\r\n");cnt = 0;}else{cnt++;delay_ms(5);}break;}}
}
9、Test_ARP.h
#ifndef _Test_ARP_H_
#define _Test_ARP_H_#include <stdint.h>#define ARP_TYPE 0x0806
#define ARP_TYPE_HI 0x08
#define ARP_TYPE_LO 0x06#define ETHER_TYPE 0x0001
#define PRO_TYPE 0x0800
#define HW_SIZE 6
#define PRO_SIZE 4
#define ARP_REQUEST 0x0001
#define ARP_REPLY 0x0002typedef struct _ARPMSG
{uint8_t dst_mac[6]; //以太网帧中的广播地址,ff.ff.ff.ff.ff.ffuint8_t src_mac[6]; //发送端MAC地址uint16_t msg_type; // ARP (0x0806)uint16_t hw_type; // 硬件类型为以太网(0x0001)uint16_t pro_type; // 协议类型为IP地址(0x0800)uint8_t hw_size; // 硬件长度为6uint8_t pro_size; //协议地址长度为4uint16_t opcode; //ARP请求为0x0001,ARP应答为0x0002uint8_t sender_mac[6]; //发送端MAC地址uint8_t sender_ip[4]; //发送端IP地址uint8_t tgt_mac[6]; //目的MAC地址,00.00.00.00.00.00uint8_t tgt_ip[4]; //目的IP地址uint8_t trailer[22]; // All zeros
} ARPMSG;extern void ARP_Init(uint8_t sn);
extern void W5500_Read_Remote_MAC(uint8_t sn, uint8_t *buf, uint8_t *dest_ip);
extern uint8_t W5500_Receive_ARP_Request(uint8_t sn, uint8_t *buff, uint16_t rlen);
extern void RemoteComputer_Read_W5500_MAC(uint8_t sn, uint8_t *buf);
#endif
10、main.c
#include "stm32f10x.h"//使能uint8_t,uint16_t,uint32_t,uint64_t,int8_t,int16_t,int32_t,int64_t
#include "stdio.h" //getchar(),putchar(),scanf(),printf(),puts(),gets(),sprintf()
#include "string.h" //使能strcpy(),strlen(),memset()
#include "delay.h"
#include "USART4.h"
#include "LED.h"
#include "socket.h"
#include "Test_ARP.h"/*
ARP(Address Resolution Protocol)的核心功能是通过IP地址解析其对应的MAC地址,
以实现网络层与链路层地址的映射,确保数据包在局域网内能准确传输。
ARP通过广播请求和单播回复,帮助设备在网络中识别彼此的硬件地址,从而实现可靠的数据传输。
在局域网中,设备间的通信依赖数据链路层的MAC地址,而网络层使用的是IP地址,因此,当W5500往
外发送信息时,只知道对方的IP地址,还是不知道发送给谁。因为一个IP地址可以对应多个
MAC地址,因此链路层只能通过MAC地址识别来是识别设备。
"255.255.255.255"是有限广播地址,用于向本地网络中的所有设备发送广播消息。
任何发往该地址的数据包都会被同一网络段内的所有设备接收。
"0.0.0.0"在默认路由中,"0.0.0.0"表示所有IP地址。一个程序选择监听"0.0.0.0",则表示要监听所有可用的IP。
单播回复:与"目标IP地址"匹配的设备会直接将"ARP回复"发送给"ARP请求者",而不是广播到整个网络。
ARP请求的过程
1)、"ARP请求者"发起ARP请求:
当主机A想要发送数据给主机B,但A只知道目标IP地址而不知道B的MAC地址时,它会广播一个"ARP请求"到网络上的所有设备。
2)、与目的IP地址匹配的设备发送"ARP回复":
主机B收到"ARP请求"后,会检查请求中的"目标IP地址"是否与自己的IP地址相匹配。如果匹配,它会构造一个"ARP回复",
其中包含自己的MAC地址,然后直接发送给主机A。
3)、"ARP请求者"接收"ARP回复":
主机A收到"ARP回复"后,它会记录"目标IP地址"和与之对应的"MAC地址",然后保存到ARP缓存中。
这样,以后就不需要再次发送ARP查询,就可以直接发送数据帧到主机B。
*/
//ioLibrary库下载地址
//下载地址:https://gitee.com/wiznet-hk/STM32F10x_W5500_Examples
//源文件下载地址:https://gitee.com/wiznet-hk
//密码生成工具:https://open.iot.10086.cn/doc/iot_platform/images/tools/token.exe
#include "wiz_platform.h"
#include "wizchip_conf.h"
#include "wiz_interface.h"
#include "W5500_Variable.h"
//#include "Do_DNS.h"const char CPU_Reset_REG[]="\r\nCPU reset!\r\n";
int main(void)
{// SCB->VTOR = 0x8000000;//中断向量表重定义// SystemInit();delay_init();//延时函数初始化NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组4USART4_Serial_Interface_Enable(115200);printf("%s",CPU_Reset_REG);//调试串口输出"\r\nCPU reset!\r\n"LED_Init();LED0_ON();wiz_timer_init(); //配置TIM2每毫秒中断一次wiz_spi_init(); //SPI1初始化wiz_rst_int_init();//初始化W5500的RST引脚和INT引脚printf("%s network install example\r\n",_WIZCHIP_ID_);wizchip_initialize();//1.注册SPI片选函数,单字节读写函数和多字节读写函数//2.W5500使用RST引脚复位//3.读取芯片版本号码,并检查是否正确//4.读PHY配置寄存器的bit[2:0],bit0=1表示W5500连接到局域网//bit1=1表示当前网速为100M,否则为10M//bit2=1表示当前以太网采用全双工通讯,否则为半双工通讯TCP_network_init(ethernet_buf, &net_info);
//设置本地网络信息
//1.使用"默认网络参数"设置本地网络参数:MAC地址,GW网关,SN子网掩码,本地IP地址,DNS服务器IP地址,DHCP模式
//2.读本地网络参数:MAC地址,GW网关,SN子网掩码,本地IP地址,DNS服务器IP地址,DHCP模式,然后从串口输出socket(TCP_SOCKET0, Sn_MR_TCP, Local_Port, 0x00);//令SOCKET端口0工作在TCP模式,并设置TCP端口为Local_PortsetSn_KPALVTR(TCP_SOCKET0, 6); // 30s keepalive//Socket在线时间寄存器,在线验证心跳包传输时间,他只在TCP模式下生效,在其他模式下将会被忽略,单位时间为5秒。//因此心跳包传输时间为6*5=30秒ARP_Init(TCP_SOCKET0);//将SOCKET通道0配置为MACRAW模式W5500_Read_Remote_MAC(TCP_SOCKET0, ethernet_buf, Dest_IP);//读远程IP地址为Dest_IP[]对应的的MAC地址RemoteComputer_Read_W5500_MAC(TCP_SOCKET0, ethernet_buf);socket(TCP_SOCKET0, Sn_MR_TCP, Local_Port, 0x00);//令SOCKET端口0工作在TCP模式,并设置TCP端口为Local_PortsetSn_KPALVTR(TCP_SOCKET0, 6); // 30s keepalive//Socket在线时间寄存器,在线验证心跳包传输时间,他只在TCP模式下生效,在其他模式下将会被忽略,单位时间为5秒。//因此心跳包传输时间为6*5=30秒while(1){LED0=!LED0;delay_ms(500);}
}
11、测试结果
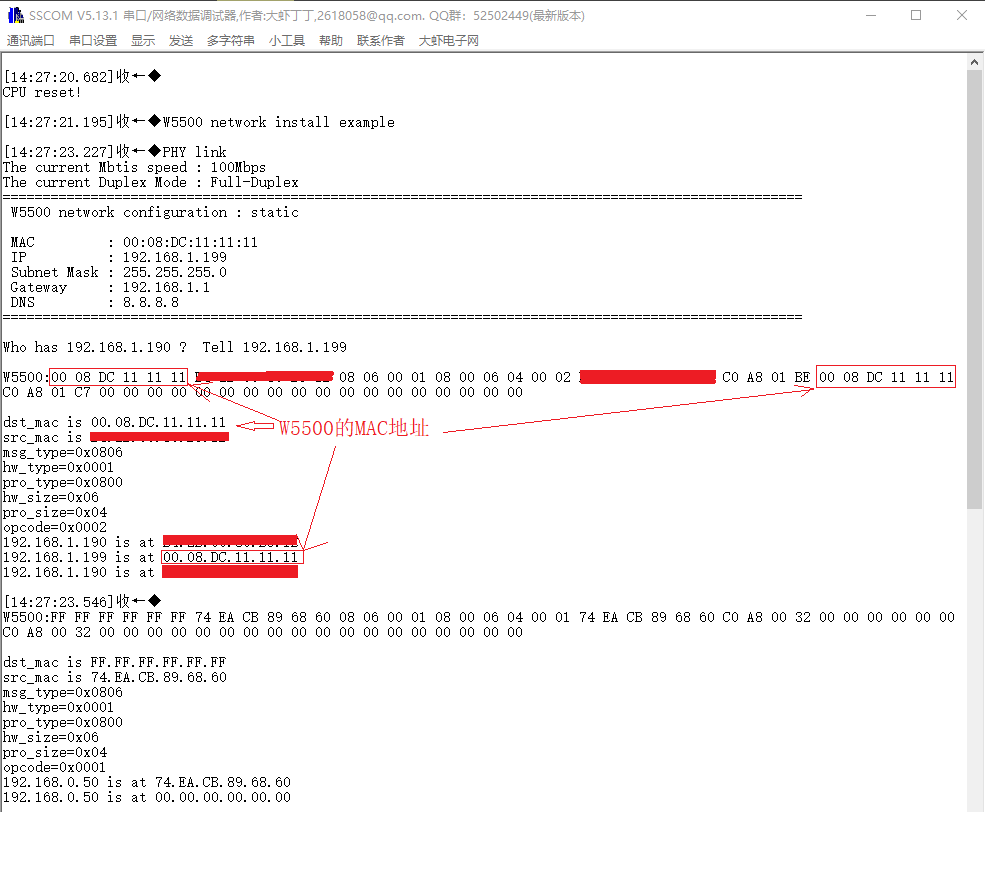



)












![[10-2]MPU6050简介 江协科技学习笔记(22个知识点)](http://pic.xiahunao.cn/[10-2]MPU6050简介 江协科技学习笔记(22个知识点))


)