涉水救援机器人设计
摘 要
随着城市化进度的加快,各种水上游乐设备的增多,水上灾害和溺水事件频繁发生,水上救援任务困难重重,特别是在一些水流湍急的环境下进行救援。传统的水上救援工作比较缓慢,大多数是通过投射救生圈或者等待专业的救援人员到来才能展开救援,积大的降低了救援的效率,严重危害着溺水者的生命。在这样的研究背景下,本文提出了一种新型的涉水救援机器人装逼,通过远程遥控和自动巡检两种工作方式对落水人员进行营救,不仅减少了救援难度,同时也提高了溺水者获救的概率。
本文在研究调查了现有水上救援机器人设备的前提下,设计了一种新型的救援设备,涉水救援机器人,其主要是由机械结构和控制系统两部分组成。本文主要完成了救援机器人的机械结构的设计,主要包括行走机构、救援机构和船体的设计,对机器人喷水推进器的基本结构和原理特点进行了详细的论述,完成了水面机器人的阻力分析。同时也完成了救援机器人控制系统的初步设计,使用三维的CAD软件完成来了涉水救援机器人的三维模型的绘制,采用ansys对救援机器人的主要零部件进行有限元分析,确保设计的救援机器人可以在水中稳定的前进,完成救援任务。
目 录
1 绪论 1
1.1 选题的背景及意义 1
1. 2 研究的现状 1
1.2.1 国内的研究现状 2
1.2.2 国外的研究现状 3
1.3 本次设计主要研究内容 4
2 涉水救援机器人的总体设计方案 6
2.1 设计要求 6
2.2 总体的设计方案 6
2.3 本章小结 7
3 涉水救援机器人的机械结构设计 8
3.1 设计方法和设计原则 8
3.2 机体结构的设计 8
3.2.1 船体结构设计 8
3.2.2 船体的排水量和吃水深度 9
3.3 行走装置的设计 9
3.3.1 机器人受到的阻力 10
3.3.2 推进器的选型 11
3.3.3 喷水推进器的工作原理 12
3.3.4 喷水推进器的优点 12
3.3.5 喷水推进器推力的影响因素 13
3.3.6 喷水电机的选型 14
3.3.7 电池的选型 15
3.4 救援装置的设计 15
3.4.1 救援网救援装置的设计 15
3.4.2 救生圈救援装置的设计 21
3.5 本章小结 22
4 涉水救援机器人的控制系统的设计 23
4.1 硬件电路的设计 23
4.1.1 晶振电路模块 23
4.1.2 复位电路模块 24
4.1.3 无线控制模块 24
4.1.4 遥控控制模块 24
4.1.5 电机控制模块 25
4.1.6 测距模块 26
4.1.7 摄像头模块 26
4.2 软件系统的设计 27
4.2.1 总体设计方案 27
4.2.2 执行机构的软件设计 28
4.3 本章小结 29
5 涉水救援机器人的建模和仿真 30
5.1 Solidworks简介 30
5.2 主要零部件三维模型 30
5.3 关键零部件有的限元分析 32
5.3.1 Ansys workbench 32
5.3.2 分析的目的 33
5.3.3 静力学分析基础 33
5.3.4 船体材料的选择 33
5.3.5 网格的划分 33
5.3.6 变形应力云图 34
5.4 涉水救援机器人的工艺性分析 35
5.5 涉水救援机器人经济成本分析 35
5.6 本章小结 36
6 总结和展望 37
6.1 总结 37
6.2 展望 37
致 谢 38
文 献 参 考 39
1 绪论
1.1 选题的背景及意义
长期以来,各种水上灾害的发生威胁着人们的生命,水上灾害不仅仅出现在洪水等自然灾害发生的时候,也出现在日常生活中,遍布于游泳馆、河流和湖泊之中。人们的日常生活离不开水,但是水也给人们带来了巨大的灾难。据统计,每年大约有50000人死于溺水[1]。同时由于我国居民的可支配收入增加,人们致力于各种水上游乐项目,同时各种安全问题层出不穷,也会遭遇死亡的威胁。不过,其中最为突出的是未能及时发现溺水者,若能及时发现溺水人员,则最少有30%的改了可以成功营救溺水者,减少不必要的伤亡[2]。
随着科技的发展,人们发明了各种各样的救援装置,但是仍然存在一定的问题,在传统的救援工作中,如果溺水者离工作人员很远,救生圈离溺水者距离远的时候,传统的救援方式作用就微乎其微[3]。常见的可以用于水上救援的设备主要有救生艇、救生衣和救生圈,和陆地相比,水上的救援工作显得更为困难,同时研究机构并没有在水上救援投入大量的研究工作,因此一种新型的救援装置的出现就显得格外重要[4]。
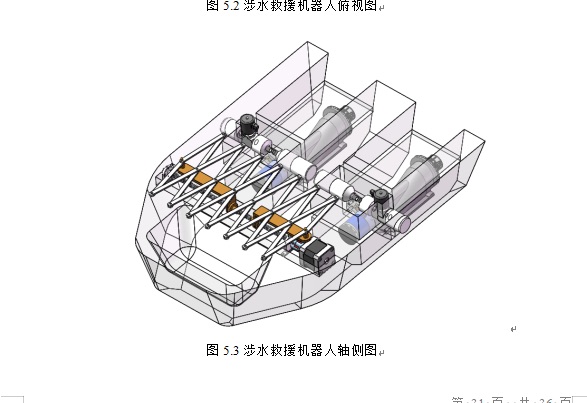
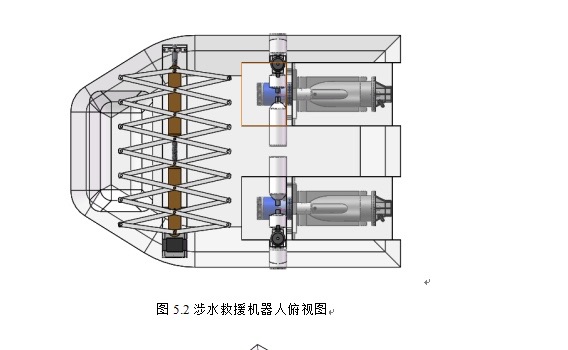
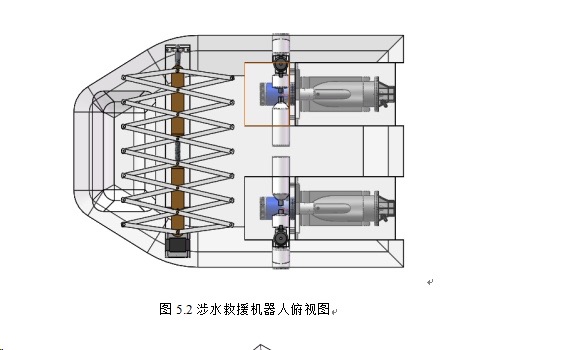
针对上述问题,本文提出了一种新型的涉水救援机器人装置,其可以实现远程遥控和自主运行两种不同的工作模式,其主要是由机械结构和电子控制两部分组成,大致可以分成四个部分[5],分别是起支撑作用的船体部分,起推进作用的船用水下喷气推进器,救援网装置和弹射救生圈装置,弹射装置将救生圈弹体发射出去后,当弹体接触到水后,弹体扩大,变成救生圈大小,方便溺水人员的自救。积大的提高了溺水人员救援的效率[6]。
1.2 研究的现状
从上世纪70年代开始,随着计算机技术的发展,各种电子传感技术的发展,各种救援机器人应运而生,其中最常见的是履带式救援机器人,其履带的运动特点,路面适应能力强,可以广泛的完成各种救援工作,随着技术的发展,救援机器人开始被细化[7]。随着世界科技的发展,救援机器人在未来将具有巨大的发展潜力,将推动世界经济的发展,带来一场新的科技革命,机器人技术在未来将会应用到各个领域,推动世界的发展[8][9]。
1.2.1 国内的研究现状
伴随着我国科技的进步,传统的救援设备已经无法满足救援任务的需要[9]。为避免溺水事故的发生,降低因为溺水导致的死亡事故,各个国家的科技人员都在进行水上救援设备的研发,水上救援设备也向着多元化的方向发展,主要是向着水上救援装置和弹射救援机器人两个方向展开看深入的研究[10]。
关于水上救援机器人的研发基本都是在我国的高校实验室内部研发的,我刚著名的高校,华东交通大学经过多年的发展,主要研究的是水上搜救机器人[11],该学校实验室研制的水面搜寻机器人已经应用到实际的搜救工作中,极大的提高了溺水人员获救的概率,其主要是通过抛投的方式将救援设备送到溺水人员的身边,救援机器人才能展开救援,也正是因为该款救援机器人需要在溺水者的附近才能发挥作用,因此其不能大范围的推广。为缓解这种现象,研发了一款自动搜寻机器人,如下图1.1所示[12]。
图1.1水上救援机器人
上图所示的救援机器人主要应用的场合有两个,一个是在普通的水面湖面的旁边,主要是用来进行避险,另外一个是安装在船上,当船上的人员出现溺水时,可以快速准确的进行救援,避免溺水人员在水中浪费体力。如果救援机器人投掷的时候,角度出现问题,可以通过远程遥控进行控制机器人想着溺水者的方向运动,直至溺水者被救起[13][14]。
除了有关水上救援机器人的研发工作之外,我国关于救生圈弹射装置的研发也取得了一定的成就。我国的山东大学和华中科技大学联合共同研发的一种新型的救生圈弹射装置,如下图1.2所示[15]。采用类似枪的发射装置,使得救生圈获得一定的动量,弹射出去,该装置最大的优点是弹射装置的射程远,可以将救生圈发射到50米之外,极大的提高了溺水者获救的概率[16][17]。



















)