Vanilla Convolution 普通卷积
卷积通道数:
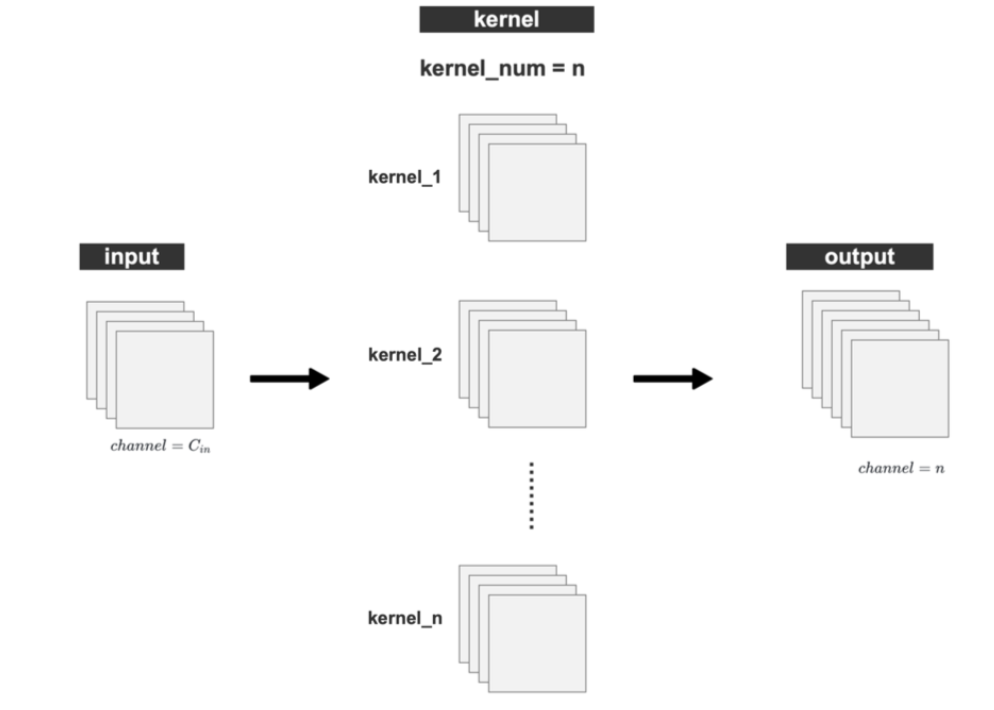
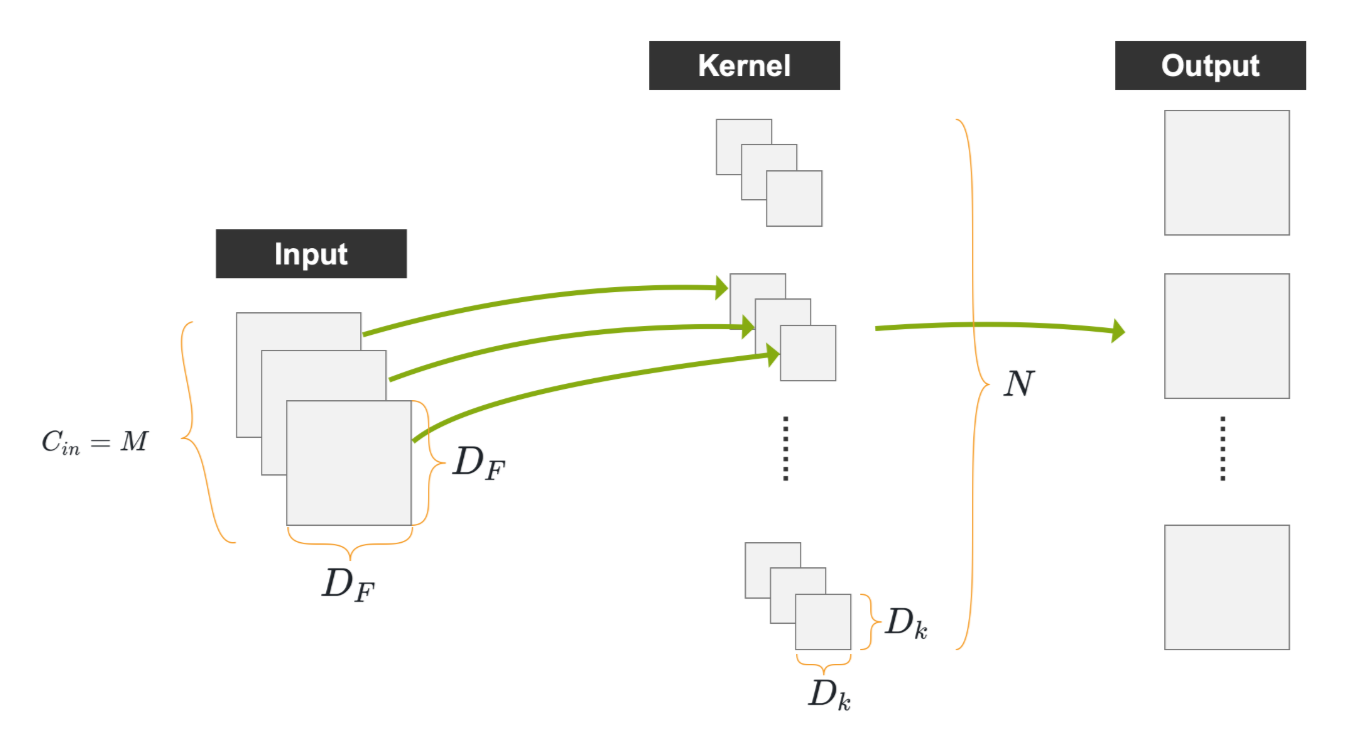
- 卷积核的数量决定输出的张量的通道数nnn,输入的张量和每一个核Kernel做卷积运算得到一个channel的输出。
- 输入通道数CinC_{in}Cin决定每一个卷积核的通道数
卷积输出feature map的尺寸的计算公式:
- W_out=Win+2Pw−KwSw+1W\_out = \frac{W_{in} + 2P_w - K_w}{S_w} + 1W_out=SwWin+2Pw−Kw+1
- H_out=Hin+2Ph−KhSh+1H\_out = \frac{H_{in} + 2P_h - K_h}{S_h} + 1H_out=ShHin+2Ph−Kh+1
其中,输入的尺寸为 (Win,Hin)(W_{\text{in}}, H_{\text{in}})(Win,Hin),卷积核的尺寸为 (Kw,Kh)(K_w, K_h)(Kw,Kh),步幅为 (Sw,Sh)(S_w, S_h)(Sw,Sh),填充为 (Pw,Ph)(P_w, P_h)(Pw,Ph),输出的尺寸为 (Wout,Hout)(W_{\text{out}}, H_{\text{out}})(Wout,Hout)
Group Convolution 分组卷积
Group convolution(分组卷积)最早是在AlexNet(Alex Krizhevsky等人于2012年提出的深度神经网络模型)中引入的。在 AlexNet中,作者们使用了分组卷积来将计算分布到多个GPU上。
计算
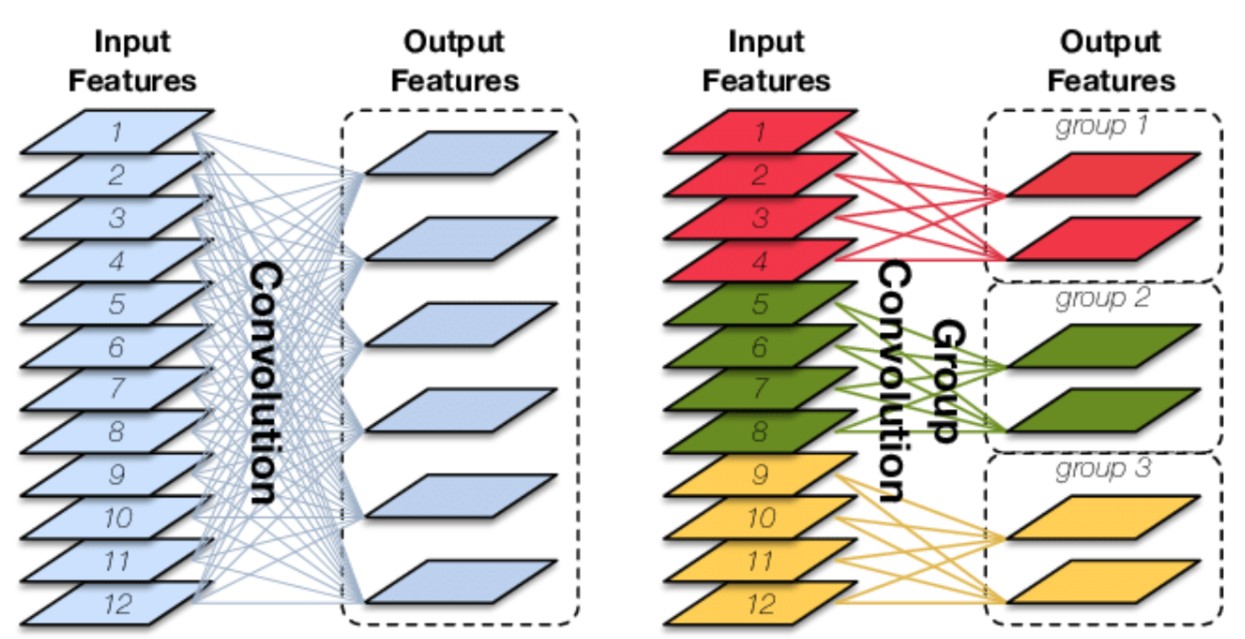
Group Convolution :将输入的 feature map张量 在 channel 的维度上进行分组,然后再对每个分组 分别进行卷积操作,再将各个输出沿channel维度拼接在一起。
参数量
Group Convolution 优点为可减小参数量。
如下图,假设输入尺寸为 Cin×H×WC_{in} \times H \times WCin×H×W,卷积核尺寸为 K×KK \times KK×K,输出的 Channel 数为 nnn,我们对于相同的输入和输出尺寸,分别使用 普通卷积 和 分组卷积来进行操作,并对比两种卷积方式的参数量。
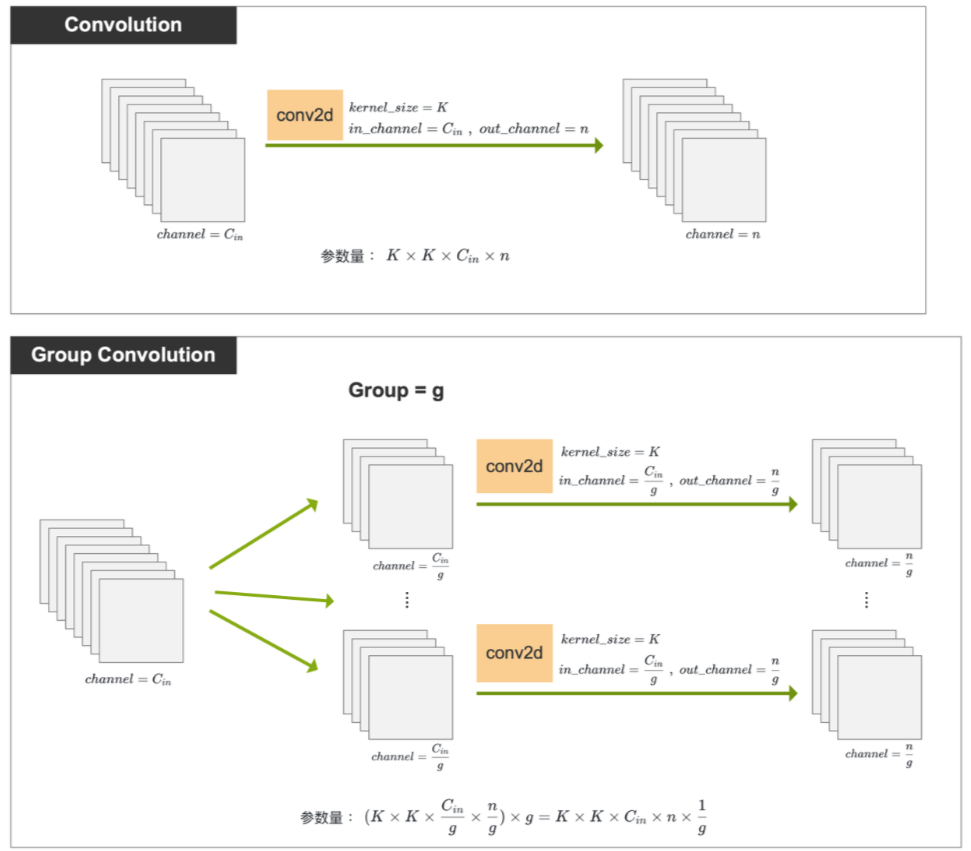
- 普通卷积:每个Kernel参数量为K×K×CinK \times K \times C_{in}K×K×Cin 一共有nnn个Kernel,总共参数量为:
K×K×Cin×nK \times K \times C_{in} \times n K×K×Cin×n - 分组卷积:将输入分为ggg个组,每个组进入普通卷积的channel数为 Cing\frac{C_{in}}{g}gCin,要保证最后沿channel维度拼接后为nnn,所以每个普通卷积的数维度为ng\frac{n}{g}gn,所以每个组用的卷积核参数量为 K×K×Cing×ngK \times K \times \frac{C_{in}}{g} \times \frac{n}{g}K×K×gCin×gn,一共ggg个组,所以总参数量为:
(K×K×Cing×ng)×g=K×K×Cin×ng(K \times K \times \frac{C_{in}}{g} \times \frac{n}{g} ) \times g = K \times K \times C_{in}\times \frac{n}{g} (K×K×gCin×gn)×g=K×K×Cin×gn
所以分组卷积是普通卷积参数量的1g\frac{1}{g}g1。
代码实现
- 使用普通卷积方法
torch.nn.conv2d(),通过参数groups指定组数 - 注意:
in_channels和out_channels都必须可以被groups整除,否则会报错, 类似 :ValueError: in_channels must be divisible by groups
import torch
import torch.nn as nnconv = nn.Conv2d(in_channels=10, out_channels=15, kernel_size=3, groups=5, stride=1, padding=1)
output = conv(torch.rand(1, 10, 20, 20))
print(output.shape) # torch.Size([1, 15, 20, 20])
Depth-wise Convolution 逐深度卷积
是分组卷积的特例:当Group Convolution 的分组数量 ggg 最大,等于输入channel 数CinC_{in}Cin时,就变为了 Depth-wise Convolution逐深度卷积。
计算
将输入的每个通道(channel)独立地进行 普通卷积运算(CinC_{in}Cin和CoutC_{out}Cout都为1),每个通道使用一个单独的卷积核进行处理,即为 DWConvolution
具体做法如下:
- 将输入特征图按照 channel 进行分组,每个 channel 一个组,即 g=Cing = C_{in}g=Cin
- 每个 channel (即每个 group ) 使用一个独立的卷积核(大小为 1×k×k1 \times k \times k1×k×k )对其对应通道做卷积运算,输入输出通道均为 1

和Group Convolution的优点一样,参数量和计算量小。
代码实现
nn.Conv2d 的参数 out_channels 和 groups 都设置为等于 in_channels
import torch
import torch.nn as nnconv = nn.Conv2d(in_channels=10, out_channels=10, kernel_size=3, groups=10, stride=1, padding=1)
output = conv(torch.rand(1, 10, 20, 20))
print(output.shape) # torch.Size([1, 10, 20, 20])
Point-wise Convolution 逐点卷积
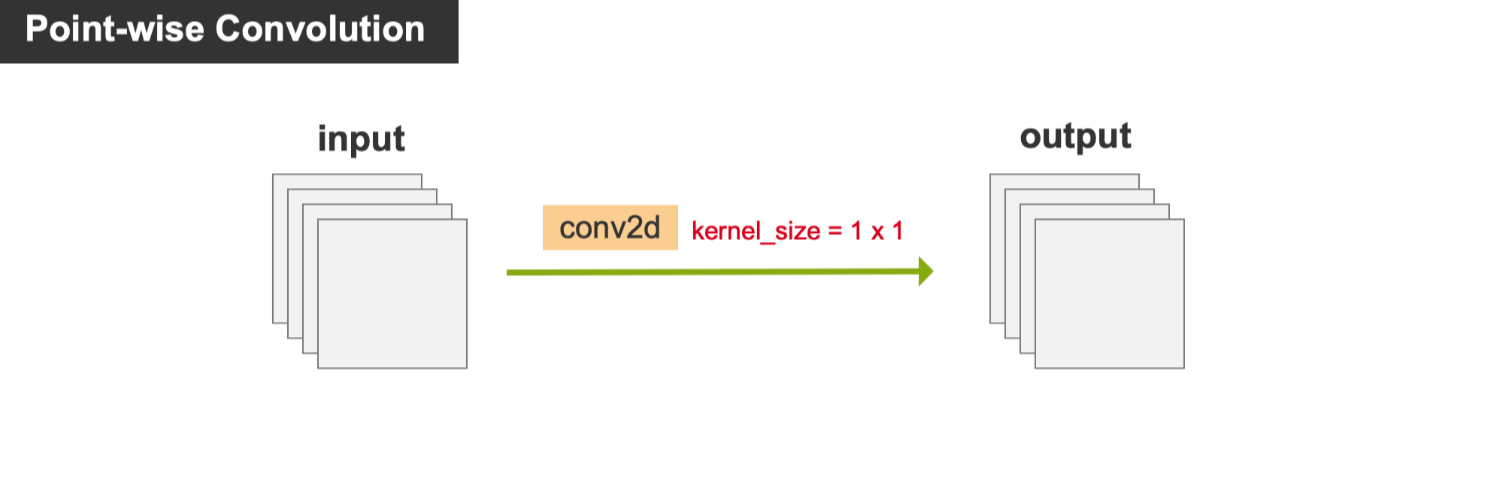
是特殊的普通卷积,kernel_size=1x1,也就是我们经常看到的一乘一卷积 conv 1x1,
因为感受野是1x1,没有融合垂直于channl维度的平面上的信息,所以它通常用来组合每个像素各个通道之间的特征信息。
优点 :参数量和计算量小
代码实现:将 nn.Conv2d 的参数 kernel_size 设置为等于 1
import torch
import torch.nn as nnconv = nn.Conv2d(in_channels=10, out_channels=10, kernel_size=1, stride=1)
output = conv(torch.rand(1, 10, 20, 20))
print(output.shape) # torch.Size([1, 10, 20, 20])
Depth-wise Separable Convolution 深度可分离卷积
提出背景
Depth-wise Separable Convolution(深度可分离卷积)最早是由Google的研究团队在2014年提出的。该方法首次出现在论文《MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications》中。
计算
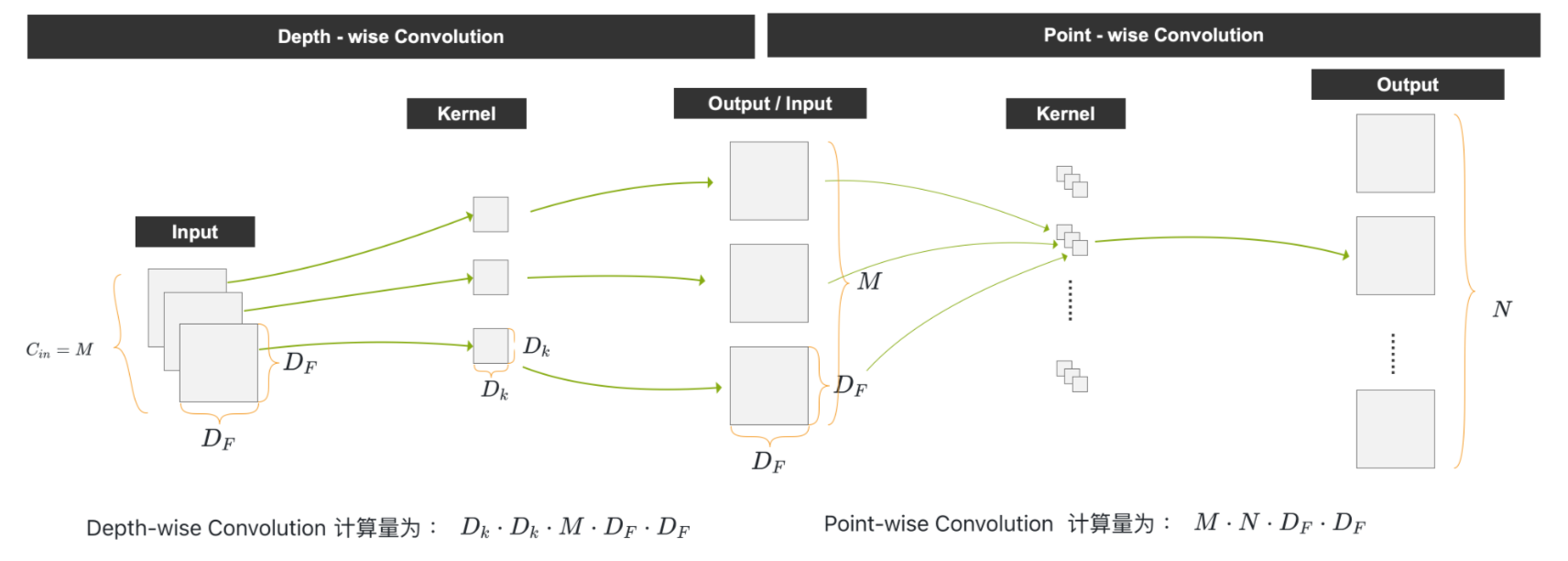
Depth-wise Separable Convolution 是
- 先做一个 Depth-wise Convolution ,后面再做一个 Point-wise Convolution
- 或者 先做一个 Depth-wise Convolution ,后面再做一个 Point-wise Convolution
计算量
Depth-wise Separable Convolution 的优势是 极大的减小了卷积的计算量。
这里还是对于相同的输入和输出尺寸,对比普通卷积核深度可分离卷积的计算量。
输入尺寸DF×DF×MD_F\times D_F \times MDF×DF×M,输出通道数为NNN
1、普通卷积计算量
对于普通卷积,计算量公式:
Dk⋅Dk⋅M⋅N⋅DF⋅DF(1)D_k \cdot D_k \cdot M \cdot N \cdot D_F \cdot D_F \tag{1} Dk⋅Dk⋅M⋅N⋅DF⋅DF(1)
2、深度可分离卷积(Depth-wise Separable Convolution)计算量
计算量分为两部分:
- Depth-wise 卷积:计算量为 Dk⋅Dk⋅M⋅DF⋅DFD_k \cdot D_k \cdot M \cdot D_F \cdot D_FDk⋅Dk⋅M⋅DF⋅DF
- Point-wise 卷积:计算量为 (1⋅1⋅M⋅DF⋅DF)⋅N(1\cdot 1\cdot M \cdot D_F \cdot D_F) \cdot N(1⋅1⋅M⋅DF⋅DF)⋅N
深度可分离卷积计算量公式:
Dk⋅Dk⋅M⋅DF⋅DF+M⋅N⋅DF⋅DF(2)D_k \cdot D_k \cdot M \cdot D_F \cdot D_F + M \cdot N \cdot D_F \cdot D_F \tag{2} Dk⋅Dk⋅M⋅DF⋅DF+M⋅N⋅DF⋅DF(2)
3、计算量对比(公式(2) ÷ 公式(1))
为对比普通卷积与深度可分离卷积的计算量,用作商法比大小,将公式(2)除以公式(1),推导得:
Dk⋅Dk⋅M⋅DF⋅DF+M⋅N⋅DF⋅DFDk⋅Dk⋅M⋅N⋅DF⋅DF=1N+1Dk2(3)\frac{D_k \cdot D_k \cdot M \cdot D_F \cdot D_F + M \cdot N \cdot D_F \cdot D_F}{D_k \cdot D_k \cdot M \cdot N \cdot D_F \cdot D_F} = \frac{1}{N} + \frac{1}{D_k^2} \tag{3} Dk⋅Dk⋅M⋅N⋅DF⋅DFDk⋅Dk⋅M⋅DF⋅DF+M⋅N⋅DF⋅DF=N1+Dk21(3)
4、典型场景(Dk=3D_k = 3Dk=3,即 3×3 卷积)
实际常用 3×3 卷积(Dk=3D_k = 3Dk=3 ),代入公式(3)得:
1N+1Dk2=1N+19\frac{1}{N} + \frac{1}{D_k^2} = \frac{1}{N} + \frac{1}{9} N1+Dk21=N1+91
5、结论
理论上,普通卷积计算量是深度可分离卷积的 8~9 倍(因NNN为输出channel数往往很大,所以 1N\frac{1}{N}N1 通常很小,主导项为 $ \frac{1}{9} $ ,故整体约为 9 倍 )。
Dilation/Atrous Convolution 膨胀卷积/空洞卷积
计算与代码实现
- 普通卷积输出的每个像素是输入的连续的像素与卷积核运算得到的。
- 膨胀卷积输出的每个像素是输入的有间隔的像素与Kernel运算得到的。
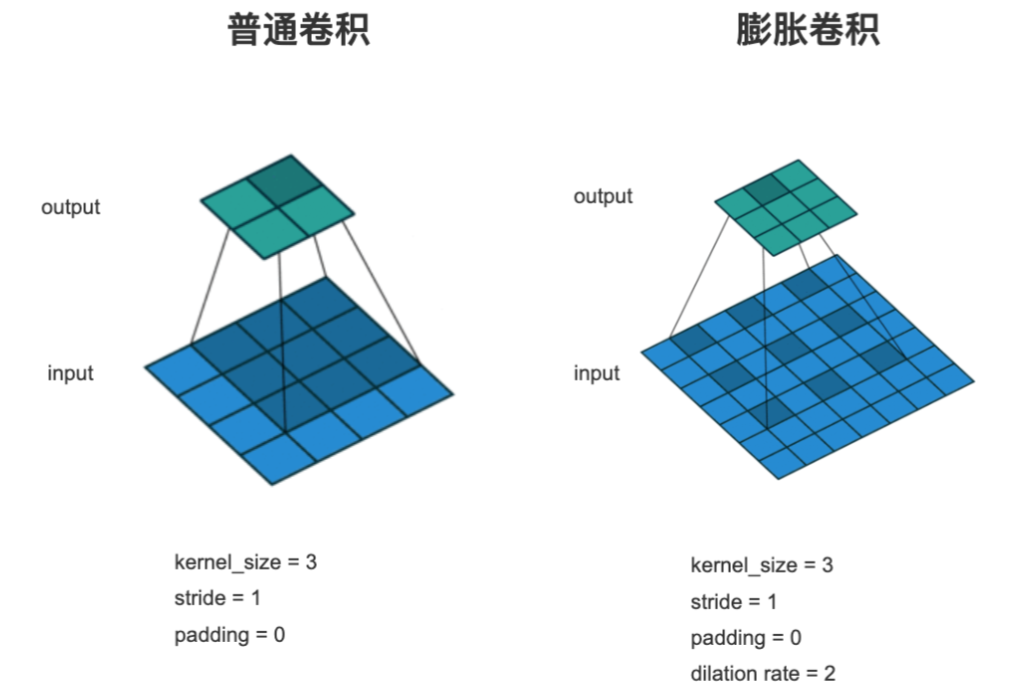
作用:增大卷积核的感受野。
感受野(Receptive Field)指CNN网络中,每个特征图的每个像素点对应输入图像的区域大小。
代码实现:指定nn.Conv2d()的膨胀率参数 dilation
- 当 dilation=1 时,没有间隔,是普通卷积
- 当 dilation=2 时,卷积核元素中间间隔一个像素
import torch
import torch.nn as nnconv = nn.Conv2d(in_channels=10, out_channels=10, kernel_size=3, stride=1, padding=2, dilation=2)
output = conv(torch.rand(1, 10, 20, 20))
print(output.shape) # torch.Size([1, 10, 20, 20])
padding参数设置
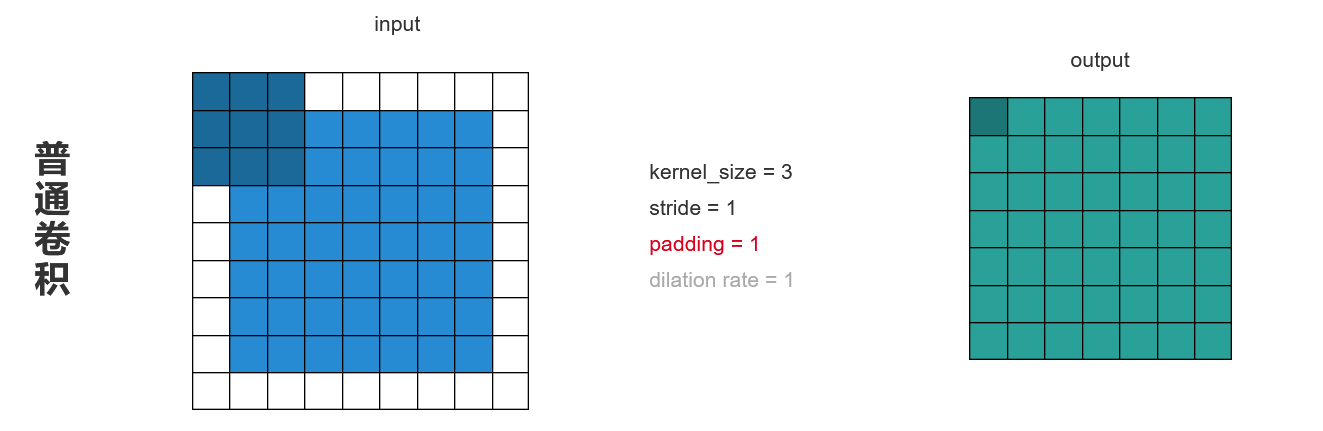
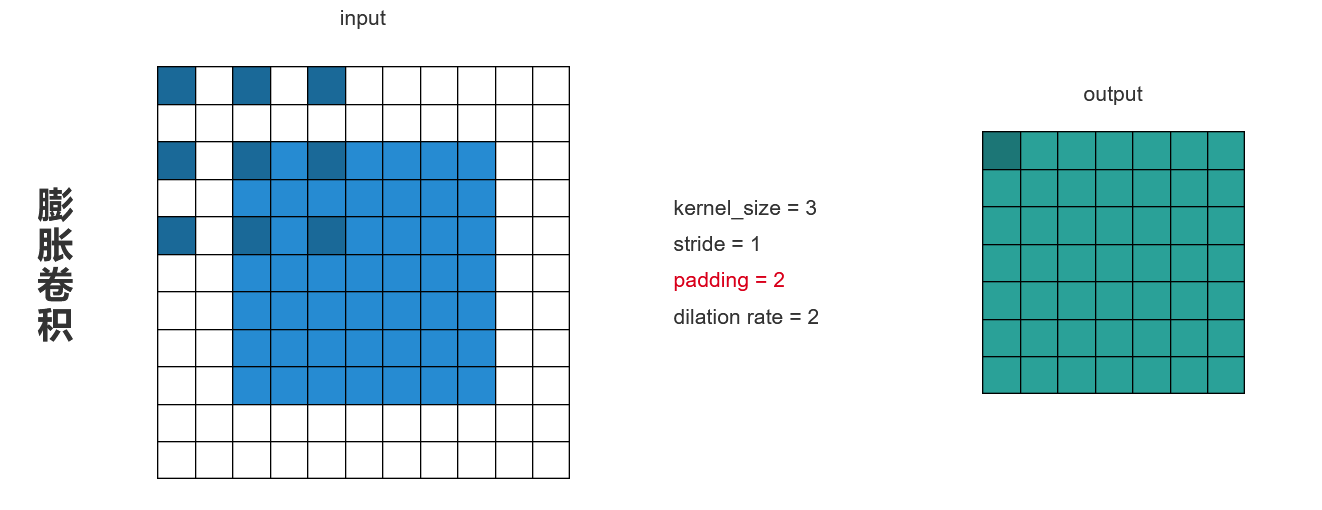
要保证输入输出的大小尺寸不变
- 普通卷积:步长stride=1,填充padding=1,即原图多加一圈像素。
- 膨胀卷积:步长stride=1,填充padding=2,加两圈像素。
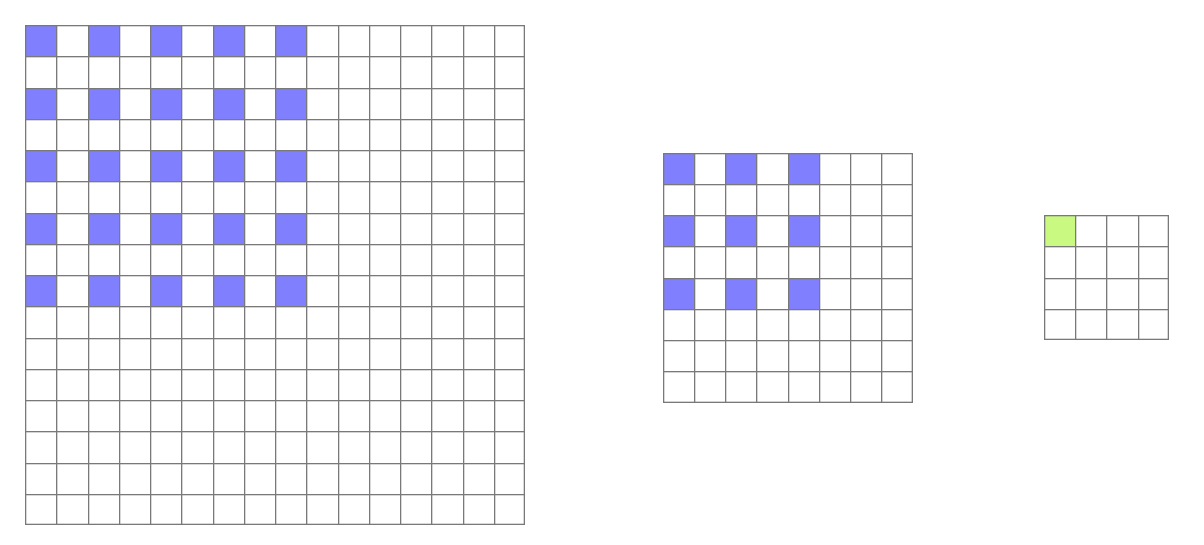
缺点:网格效应Gridding Effect
由于膨胀卷积是一种稀疏的采样方式,当多个膨胀卷积叠加时,有些像素根本没有被利用到,会损失信息的连续性与相关性,进而影响分割、检测等要求较高的任务。
比如这里连续用了两次膨胀卷积得到的feature map中的一个绿色的像素,回溯回去是由紫色像素得到的。所以如果整个网络只有两层膨胀卷积的话,相当于只有原图的四分之一的像素用到了。
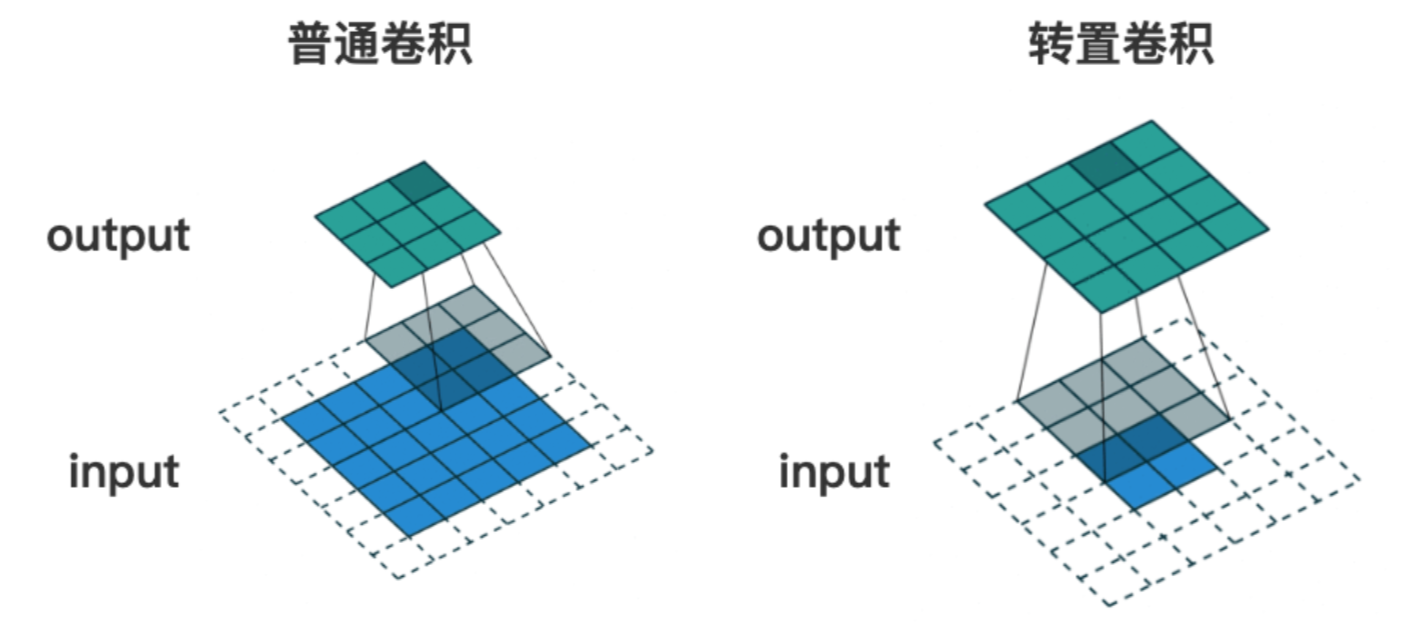
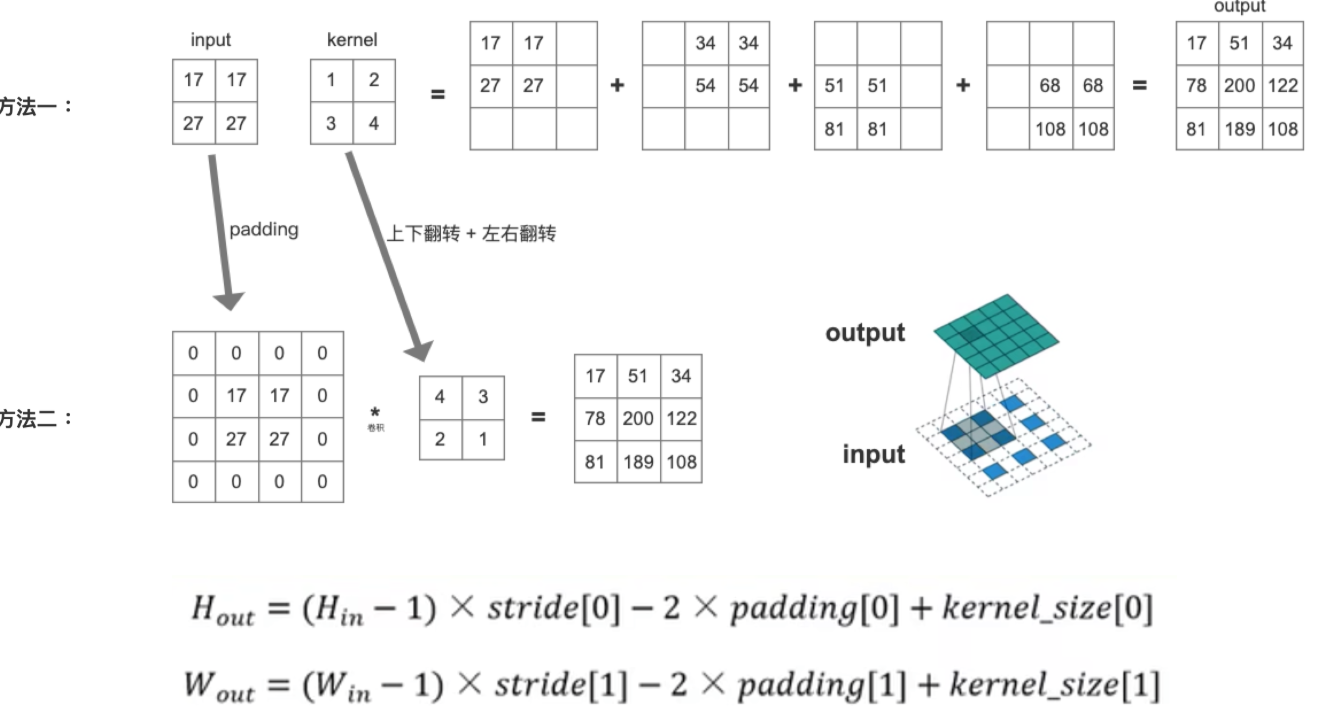
Transposed Convolution 转置卷积
转置卷积也是卷积,只不过转置卷积 是一种上采样操作
如下图的转置卷积所示,输入图像尺寸为 2x2, 输出图像的尺寸为 4x4。
参数设置
如何设置 转置卷积 的 stride 和 padding
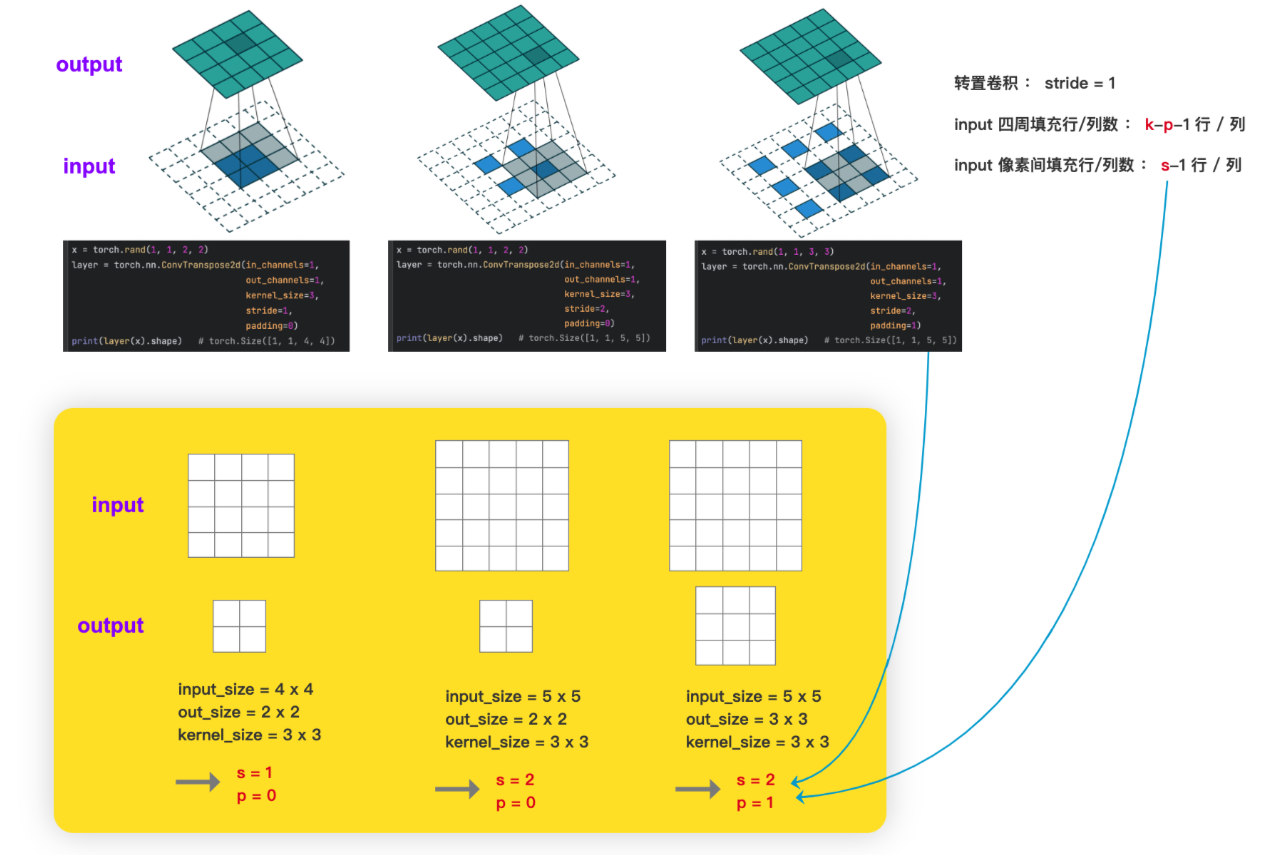
已知 input 和 kernel 求 output
Deformable Convolution 可变形卷积
论文:《Deformable Convolutional Networks》
普通卷积公式:
y(p0)=∑pn∈Rw(pn)⋅x(p0+pn)\mathbf{y}(\mathbf{p}_0) = \sum_{\mathbf{p}_n \in \mathcal{R}} \mathbf{w}(\mathbf{p}_n) \cdot \mathbf{x}(\mathbf{p}_0 + \mathbf{p}_n) y(p0)=pn∈R∑w(pn)⋅x(p0+pn)
- y(p0)\boldsymbol{y(p_0)}y(p0):输出特征图在位置 p0\boldsymbol{p_0}p0 处的值
- w(pn)\boldsymbol{w(p_n)}w(pn):卷积核(权重)在位置 pn\boldsymbol{p_n}pn 处的参数
- x(p0+pn)\boldsymbol{x(p_0 + p_n)}x(p0+pn):输入数据在位置 p0+pn\boldsymbol{p_0 + p_n}p0+pn 处的原始值
- R\mathcal{R}R:卷积核的作用范围(即卷积核覆盖的所有位置集合,决定卷积的“视野”)
简单说,就是输出位置的值 = 卷积核权重与输入对应区域的加权求和。
可变性卷积公式:y(p0)=∑pn∈Rw(pn)⋅x(p0+pn+Δpn)\mathbf{y}(\mathbf{p}_{0})=\sum_{\mathbf{p}_{n}\in\mathcal{R}}\mathbf{w}(\mathbf{p}_{n})\cdot\mathbf{x}(\mathbf{p}_{0}+\mathbf{p}_{n}+\Delta\mathbf{p}_{n})y(p0)=pn∈R∑w(pn)⋅x(p0+pn+Δpn)
- y(p0)\mathbf{y}(\mathbf{p}_0)y(p0):输出特征图在位置 p0\mathbf{p}_0p0 处的像素值
- R\mathcal{R}R:卷积核的固定感受野范围(如 3×3 卷积的 9 个位置集合)
- w(pn)\mathbf{w}(\mathbf{p}_n)w(pn):卷积核在固定位置 pn\mathbf{p}_npn 处的权重参数
- x(⋅)\mathbf{x}(\cdot)x(⋅):输入特征图
- Δpn\Delta\mathbf{p}_nΔpn:偏移量表示卷积核第 nnn 个采样点相对于固定位置 pn\mathbf{p}_npn 的偏移。偏移量 Δpn\Delta\mathbf{p}_nΔpn是学习到的值,是浮点型数据,由图像经过普通卷积计算得到。









)









