ROS机器人云实践作品申报书
ROS机器人云实践设计
一、项目基本信息
项目名称:基于ROS的移动机器人云实践平台设计与应用
申报单位:[具体单位名称]
项目负责人:[具体参与人员]
申报日期:[填写日期]
二、项目背景与目标
项目背景:
随着机器人技术的飞速发展,ROS(Robot Operating System)已成为机器人领域的标准软件框架,广泛应用于学术研究、工业自动化及智能制造等多个领域。然而,传统ROS实验环境受限于硬件资源、软件配置及物理空间,难以满足大规模、跨地域的教学与实践需求。
为此,本项目设计了基于ROS的移动机器人云实践平台,旨在通过云计算技术,提供灵活、高效、可扩展的机器人实践环境,打破地域与资源限制,促进机器人技术的普及与创新。
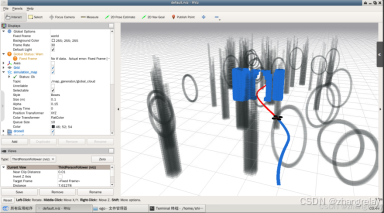
开源空中机器人案例ego扩展到云实践平台
项目目标:
- 构建一个基于云的ROS机器人实践平台,支持远程访问与操作,支持远程共享协作。
- 提供丰富的机器人模型库、传感器模拟及算法工具包,降低机器人学习研究和开发门槛。
- 实现教学与实践的无缝对接,提升学生及研究人员的机器人编程与系统设计能力。
- 推动ROS机器人技术的广泛应用,促进产学研深度融合。
三、科学性及技术基础
技术基础:
本项目基于成熟的云计算技术、ROS机器人操作系统及Gazebo仿真平台,确保了技术的先进性与可靠性。
云计算技术提供了弹性的计算资源,支持多用户并发访问;ROS作为机器人领域的标准框架,提供了丰富的功能包与工具;Gazebo则是一个强大的3D仿真环境,能够模拟复杂的物理场景与机器人行为。同时,平台还支持多种仿真平台共存,如CoppeliaSim仿真软件,为用户提供更多选择。
系统架构:
平台采用微服务架构,将不同功能模块解耦,提高了系统的可维护性与扩展性。
主要包括用户管理模块、资源调度模块、仿真环境模块、算法库模块及数据分析模块等。各模块间通过API进行通信,实现了高效的数据交换与服务调用。
算法与模型:
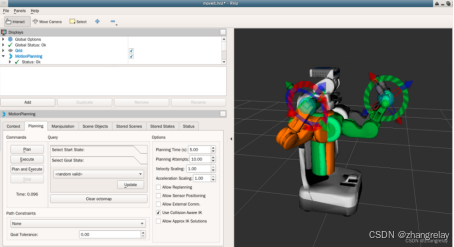
平台集成了多种先进的机器人算法与模型,如SLAM(同步定位与地图构建)、路径规划、避障算法等,这些算法均基于ROS实现,并经过了大量实验验证,确保了其科学性与有效性。
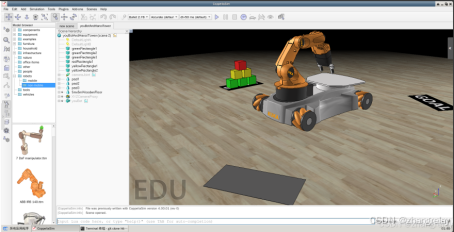
CoppeliaSim仿真扩展到云实践平台
项目已取得发明专利3项、软件著作权1项。
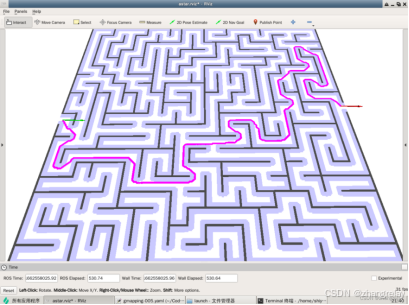
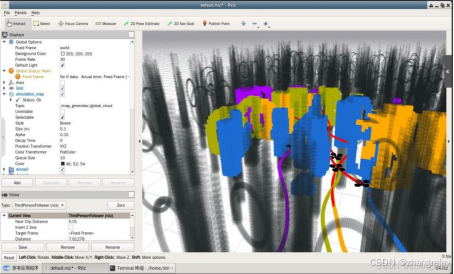
云实践平台中路径规划算法演示
四、项目特色与创新点
- 云实践环境:
- 灵活性:用户可根据需求灵活选择计算资源与仿真环境,无需担心硬件限制。
- 可扩展性:平台支持多用户并发访问,能够根据用户数量动态调整资源分配。
- 易用性:提供直观的用户界面与详细的操作指南,降低了ROS机器人的学习门槛。
- 丰富的资源库:
- 机器人模型库:包含多种类型的机器人模型,如移动机器人、机械臂、无人机等,支持用户自定义模型导入。
- 传感器模拟:模拟多种传感器数据,如激光雷达、摄像头、IMU等,为机器人感知环境提供真实数据。
- 算法工具包:集成多种ROS算法包,如导航、视觉处理、语音识别等,支持用户快速开发与应用。
- 跨语言基础复习与实战融合:
- 整合了Python与C++两种主流编程语言的基础复习模块,用户可以在同一平台上回顾两种语言的核心语法与编程范式,并立即将所学应用于机器人控制、传感器数据处理等实战场景中。
- 虚拟仿真与现实世界无缝对接:
- 平台内置的Gazebo仿真环境能够高度模拟现实世界中的物理现象与机器人行为,仿真结果可直接映射到实体机器人上,实现从虚拟到现实的平滑过渡。
- 移动机器人算法综合测评体系:
- 构建了一套全面的算法测评体系,针对移动机器人领域的核心算法,如SLAM、路径规划、机器视觉等,提供标准化的测试场景与数据集,允许用户自定义测试条件,以评估算法在不同环境下的性能表现。
- 编程、设计与实践的深度融合:
- 强调编程技能、机器人设计理念与实践操作能力的深度融合,用户在学习ROS编程的同时,可以参与到移动机器人的整体设计流程中,全程体验机器人开发的完整周期。
- 技术创新与实践应用的闭环生态:
- 构建了一个从技术创新到实践应用的闭环生态系统,鼓励用户基于ROS进行技术创新,同时提供了将这些创新成果快速转化为实际应用场景的途径。
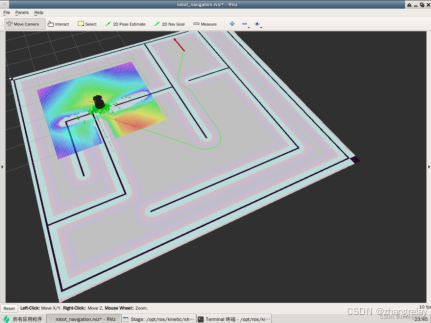
云实践平台中移动机器人导航演示
云实践平台中各类机器人演示
五、教学效果与成果
- 提升学生能力:
- 学生通过实践平台,熟练掌握了ROS编程技巧,提升了代码编写与调试能力。
- 学生能够设计并实现复杂的机器人系统,包括硬件选型、软件架构、算法集成等。
- 面对仿真环境中的各种挑战,学生能够运用所学知识,独立解决问题。
- 学生在相关比赛中获得了高层次奖项,如2022年微软MVP和2024年国赛一等奖。
- 促进教学创新:
- 采用项目驱动、案例分析等教学方法,激发学生的学习兴趣与主动性。
- 提供丰富的教学资源,如视频教程、实验指南、项目案例等,支持教师开展多样化教学活动。
- 建立多元化的评估体系,全面评价学生的学习过程与成果,促进教学质量的提升。
- 教师们获得了教学奖项,同时提升了新教师的教学能力。
- 增强实践体验:
- 仿真环境高度接近真实世界,为学生提供了真实的机器人操作体验。
- 支持多人协作与在线交流,增强了学生的学习互动性与参与感。
- 建立及时的反馈机制,帮助学生及时了解自己的学习进度与问题,调整学习策略。
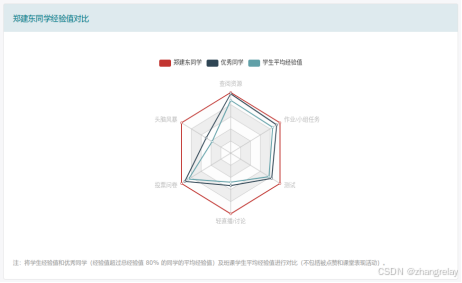
云实践平台中学生评估体系
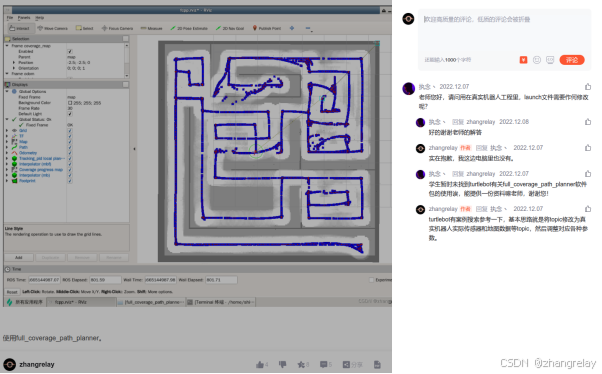
云实践平台中在线社区答疑
六、实施情况与推广应用
- 平台建设:
- 选择成熟的云计算服务提供商,如蓝桥云课,确保平台的稳定性与可靠性。
- 采用敏捷开发方法,分阶段完成平台功能开发,包括用户管理、资源调度、仿真环境等核心模块。
- 进行多轮测试,包括功能测试、性能测试、安全测试等,确保平台的质量与用户体验。
- 自2017年上线以来,保持持续更新维护。
- 课程集成:
- 与多门机器人相关课程进行深度集成,设计实验项目与案例分析,确保教学内容与平台功能的紧密结合。
- 为教师提供平台使用培训,包括操作指南、教学案例、项目实践等,提升教师的教学能力。
- 组织学生参与平台实践项目,提供必要的指导与支持,确保学生能够顺利完成实践任务。
- 推广与应用:
- 在学校内部进行平台推广,组织宣讲会、工作坊等活动,吸引学生参与平台实践。
- 与其他高校建立合作关系,共享平台资源,开展联合教学与实践活动。
- 与机器人企业建立合作关系,将平台应用于产品研发、员工培训等领域,推动产学研深度融合。
支持多人协作共同解决困难提升效率

平台建设包括社区和云实践平台等
参与机器人专业教师系列培训分享
七、推广应用前景
- 教育领域:
- 服务高校教学,成为高校机器人相关课程的重要教学工具,提升教学质量与效果。
- 服务职业培训,为机器人行业提供职业培训服务,培养更多具备ROS机器人技术的专业人才。
- 服务在线教育,结合在线教育平台,提供远程ROS机器人课程与实践机会,扩大教育覆盖面。
- 工业领域:
- 面向产品研发,支持机器人企业进行产品研发与测试,缩短研发周期,降低研发成本。
- 面向员工培训,为企业员工提供ROS机器人技术培训,提升员工的技能水平与创新能力。
- 面向智能制造,结合智能制造技术,推动工业自动化与智能化发展,提升生产效率与产品质量。
- 科研领域:
- 促进学术研究,为科研人员提供ROS机器人研究平台,支持机器人算法、传感器技术、人机交互等领域的学术研究。
- 促进产学研项目合作,推动ROS机器人技术的创新与应用,提升我国机器人技术的国际竞争力。
- 社会影响:
- 推动技术普及,通过平台推广与应用,提升公众对ROS机器人技术的认知与兴趣,推动机器人技术的普及与发展。
- 构建创新生态,构建ROS机器人技术创新生态,吸引更多人才与资源投入机器人领域,推动机器人产业的繁荣与发展。

全国ROS培训基地建设
八、结论与展望
基于ROS的移动机器人云实践平台设计项目,通过云计算技术、ROS机器人操作系统及Gazebo仿真平台的深度融合,构建了一个灵活、高效、可扩展的机器人实践环境。
该平台不仅提升了学生的机器人编程与系统设计能力,还促进了教学与实践的无缝对接,为机器人技术的普及与创新提供了有力支持。未来,我们将继续优化平台功能,拓展应用领域,推动ROS机器人技术的广泛应用与深入发展,为我国机器人产业的繁荣与发展贡献力量。
申报单位(盖章):
项目负责人(签字):
日期:[填写日期]
基于ROS的移动机器人云实践平台:创新设计与应用成果
摘要
随着机器人技术的飞速发展,ROS(Robot Operating System)已成为机器人领域的标准软件框架。
然而,传统ROS实验环境受限于硬件资源、软件配置及物理空间,难以满足大规模、跨地域的教学与实践需求。为此,我们设计了基于ROS的移动机器人云实践平台,通过云计算技术提供灵活、高效、可扩展的机器人实践环境,旨在打破地域与资源限制,促进机器人技术的普及与创新。本文将全面介绍该平台的创新设计、技术实现、应用成果及未来展望。
一、项目背景与目标
项目背景
机器人技术的快速发展对实践环境提出了更高的要求。
传统ROS实验环境由于硬件资源、软件配置及物理空间的限制,难以满足大规模、跨地域的教学与实践需求。云计算技术的兴起为解决这一问题提供了新的思路。
项目目标
本项目旨在构建一个基于云的ROS机器人实践平台,支持远程访问与操作、远程共享协作等功能。
平台提供丰富的机器人模型库、传感器模拟及算法工具包,接入专用智能大模型工具,降低机器人学习研究和开发门槛。同时,实现教学与实践的无缝对接,提升学生及研究人员的机器人编程与系统设计能力,推动ROS机器人技术的广泛应用,促进产学研深度融合。
二、平台的科学性
技术基础
本项目基于成熟的云计算技术、ROS机器人操作系统及Gazebo仿真平台。
云计算技术提供了弹性的计算资源,支持多用户并发访问;ROS作为机器人领域的标准框架,提供了丰富的功能包与工具;Gazebo则是一个强大的3D仿真环境,能够模拟复杂的物理场景与机器人行为。此外,平台还支持多种仿真平台共存,如CoppeliaSim仿真软件,为用户提供更多选择。
系统架构
平台采用微服务架构,将不同功能模块解耦,提高了系统的可维护性与扩展性。
主要包括用户管理模块、资源调度模块、仿真环境模块、算法库模块及数据分析模块等。各模块间通过API进行通信,实现了高效的数据交换与服务调用。
算法与模型
平台集成了多种先进的机器人算法与模型,如SLAM(同步定位与地图构建)、路径规划、避障算法等。
这些算法均基于ROS实现,并经过了大量实验验证,确保了其科学性与有效性。平台已取得发明专利3项、软件著作权1项,进一步证明了其技术实力。
三、平台的创新设计
跨语言基础复习与实战融合
平台突破性地整合了Python与C++两种主流编程语言的基础复习模块。
用户不仅可以在同一平台上回顾两种语言的核心语法与编程范式,还能立即将所学应用于机器人控制、传感器数据处理等实战场景中。这种跨语言的学习与实践方式,不仅提升了学习者的编程灵活性,还促进了他们对不同语言在机器人领域应用优势的深刻理解,为解决复杂机器人问题提供了多样化的技术路径。
虚拟仿真与现实世界无缝对接
平台内置的Gazebo仿真环境能够高度模拟现实世界中的物理现象与机器人行为,使得用户能够在无实体机器人硬件的情况下,进行导航、路径规划、避障等高级功能的虚拟仿真实验。
更重要的是,这些仿真结果可直接映射到实体机器人上,实现从虚拟到现实的平滑过渡。这种无缝对接机制极大地降低了机器人实验的门槛与成本,加速了机器人技术的研发与迭代速度。
移动机器人算法综合测评体系
针对移动机器人领域的核心算法,如SLAM、路径规划、机器视觉等,平台构建了一套全面的算法测评体系。
该体系不仅提供了标准化的测试场景与数据集,还允许用户自定义测试条件,以评估算法在不同环境下的性能表现。通过直观的可视化报告与数据分析工具,用户能够快速识别算法瓶颈,优化算法参数,甚至创新算法设计,从而推动移动机器人技术的持续进步。
编程、设计与实践的深度融合
平台强调编程技能、机器人设计理念与实践操作能力的深度融合。
用户在学习ROS编程的同时,可以参与到移动机器人的整体设计流程中,从需求分析、系统架构设计、硬件选型到软件实现,全程体验机器人开发的完整周期。此外,平台还提供了丰富的实践项目案例,如自主导航机器人、环境监测无人机等,引导用户将理论知识转化为实际解决方案,培养其解决复杂工程问题的能力。
技术创新与实践应用的闭环生态
平台构建了一个从技术创新到实践应用的闭环生态系统。
一方面,它鼓励用户基于ROS进行技术创新,如开发新的算法、传感器或机器人模型;另一方面,它提供了将这些创新成果快速转化为实际应用场景的途径,如通过云服务部署机器人应用、参与行业挑战赛等。这种闭环生态不仅激发了用户的创新活力,还促进了机器人技术的产业化进程,为机器人行业的持续发展注入了新的动力。
四、应用成果与影响
科学研究支撑
平台集成的多种先进机器人算法与模型为科学研究提供了有力支撑。
通过平台,研究人员可以方便地进行算法测试与优化,加速科研进程。目前,平台已支撑多项科研项目,取得显著研究成果。
获奖与认证
学生和教师应用云实践平台参与各类机器人竞赛与教学竞赛,获得多项国家级和行业级证书。
这些荣誉不仅证明了平台的教学效果,也提升了学校和团队的知名度。同时,团队老师还获得了多家行业机构的聘书,积极推进云实践平台的普及与应用。
媒体报道与行业影响
平台的建设成果得到了媒体的广泛关注和报道。
例如,东北大学公众号对机器人竞赛指数进行了报道,常熟理工学院获得了A+评级。此外,团队还参加了余姚举办的第五届中国机器人峰会,并做了《为了更好的实践----论ROS教学培训》的演讲分享,进一步扩大了平台的影响力。
社会影响与产学研融合
平台通过推广与应用,提升了公众对ROS机器人技术的认知与兴趣,推动了机器人技术的普及与发展。
同时,平台还促进了产学研的深度融合,为机器人企业提供了产品研发与测试的支持,缩短了研发周期,降低了研发成本。此外,平台还参与了全国ROS培训基地建设,成为第一批ROS培训基地,为培养更多ROS机器人技术专业人才做出了贡献。
五、未来展望
基于ROS的移动机器人云实践平台设计项目通过云计算技术、ROS机器人操作系统及Gazebo仿真平台的深度融合,构建了一个灵活、高效、可扩展的机器人实践环境。
未来,我们将继续优化平台功能,拓展应用领域,推动ROS机器人技术的广泛应用与深入发展。同时,我们还将加强与高校、企业及研究机构的合作,共同推动机器人技术的创新与发展,为我国机器人产业的繁荣与发展贡献力量。
《基于ROS的移动机器人云实践平台创新设计与应用》项目构建了一个融合云计算、ROS机器人操作系统和Gazebo仿真的创新平台。该平台突破传统实验环境限制,提供弹性计算资源和多用户并发支持,集成了SLAM、路径规划等先进算法,已获3项发明专利。创新性地实现了跨语言学习、虚实仿真对接、算法测评体系等功能,支持从编程到实践的全流程开发。应用成效显著,学生获国家级竞赛奖项,支撑多项科研项目,并获评全国首批ROS培训基地。平台将持续优化,推动ROS技术普及与产学研深度融合,助力我国机器人产业发展。

:激活函数)




 ret2dir详细)










![[每周一更]-(第155期):深入Go反射机制:架构师视角下的动态力量与工程智慧](http://pic.xiahunao.cn/[每周一更]-(第155期):深入Go反射机制:架构师视角下的动态力量与工程智慧)
)
)