PNP机器人介绍:全球知名具身智能/AI机器人实验室介绍之
多伦多大学机器人研究所

1,多伦多大学机器人研究所介绍
多伦多大学机器人研究所(University of Toronto Robotics Institute, 简称UTRI)是加拿大规模最大、跨学科最多样化的机器人研究平台之一,也是北美在具身智能与人工智能机器人方向极具代表性的科研中心。PNP机器人本次推出多伦多大学机器人研究所介绍。该研究所由多伦多大学工程学院院长战略基金创立,起初的目标是推动学校在机器人领域的学术和产业领导力,并在“机器人”被纳入2018-2023年多伦多大学战略研究计划后进一步得到强化与扩展。研究所自成立以来,就将自身定位于国际一流研究平台,持续吸引来自全球的顶尖学者、博士后以及研究生加入。
多伦多大学是加拿大综合排名第一的大学
UTRI的研究内容覆盖范围广阔,主要围绕三大研究支柱展开:自主田间机器人、医疗机器人、以及先进制造业机器人。在自主田间机器人方向,研究人员致力于解决农业自动化、农作物监测与采收、农田无人化作业等挑战,力求在应对全球粮食安全问题中发挥作用。在医疗机器人领域,研究所聚焦手术机器人、腔镜机器人、康复机器人等关键方向,结合计算机视觉与力控技术,提高机器人在复杂环境下的感知与操作能力。而在先进制造业方面,多伦多大学机器人研究所积极探索工业4.0与智能制造的融合,推动柔性生产、协作机器人以及高精度装配机器人技术的发展。
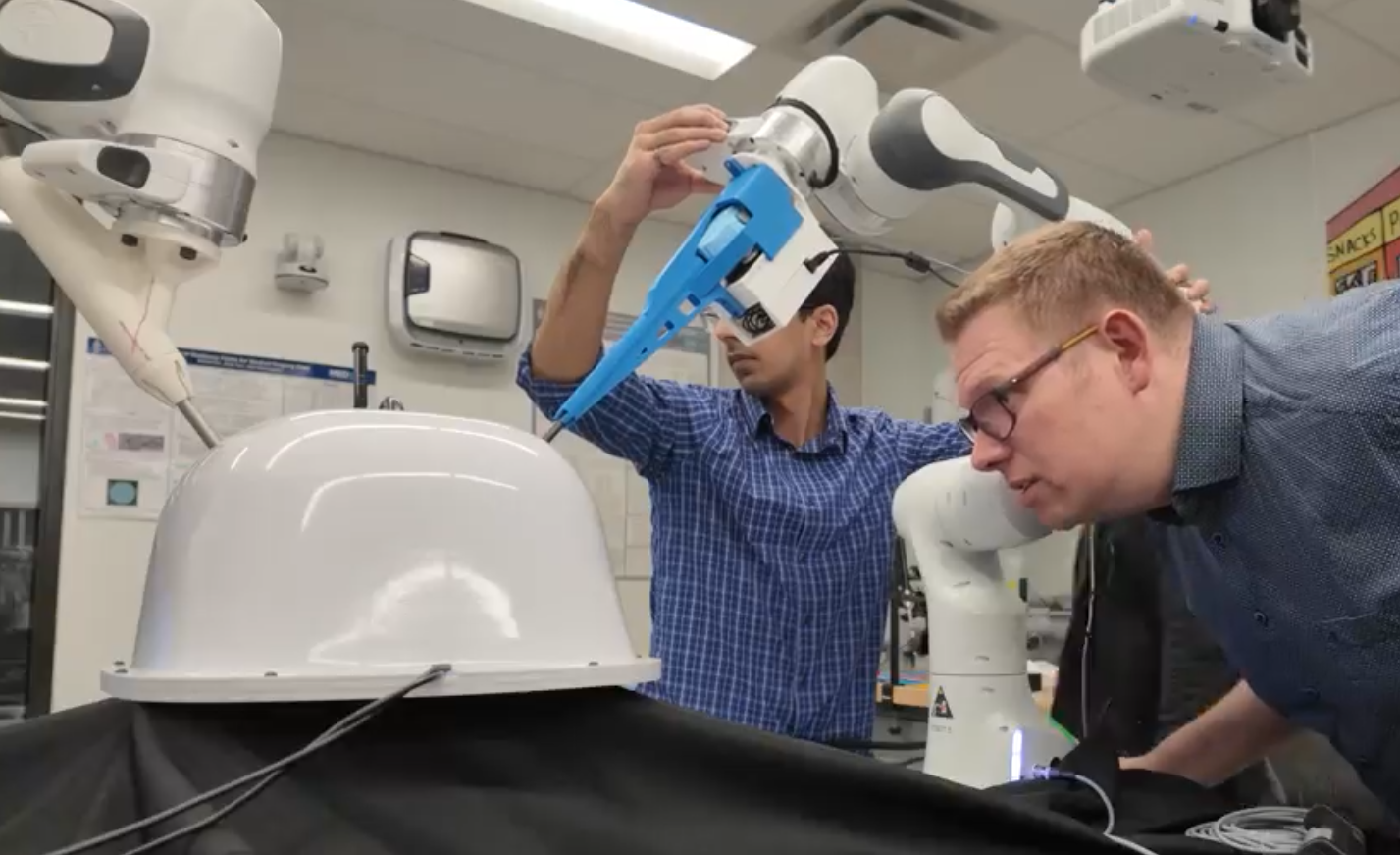
在这些领域中,医学计算机视觉与机器人实验室(Medical Computer Vision and Robotics Lab, MCVR)由Lueder Alexander Kahrs教授带领,重点研究医疗腔镜的遥操作与机器人辅助微创手术。
 医疗机器人研究
医疗机器人研究
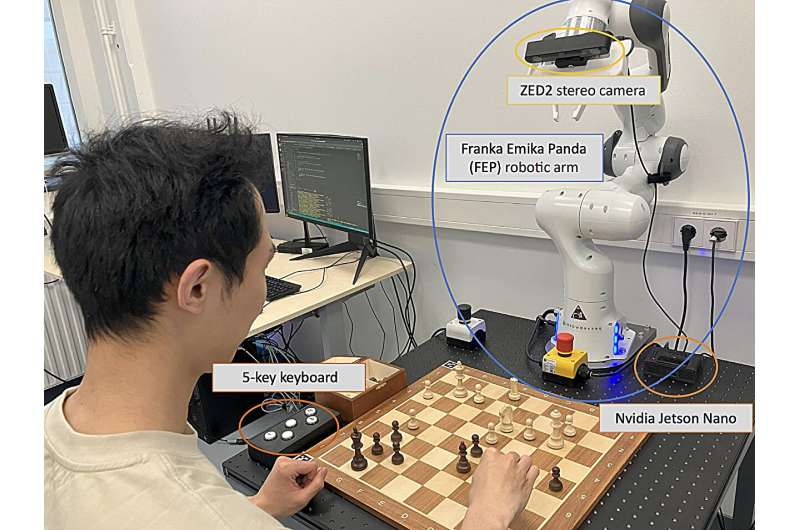
实验室采用Franka协作机器人作为研究与实验平台。这款机器人以7个自由度的关节结构著称,每个关节都具备高灵敏度的力控能力,能够感知低至0.05N的作用力。这使得机器人在复杂医疗操作中可以实现极高的安全性和精确度,尤其适合神经外科、穿刺操作以及分体式腔镜的微创手术研究。Kahrs教授团队通过在Franka机器人上集成高分辨率的视觉传感与触觉反馈,不仅提升了医生在远程操作时的感知能力,还为外科手术自动化提供了可能。
另一支颇具特色的团队是连续机器人实验室(Continuum Robotics Laboratory, CRL)。该实验室的研究灵感来源于自然界的软体生物,如章鱼触腕、蛇和藤蔓等,致力于探索机器人形态学的极限。连续体机器人不同于传统刚性关节机器人,它们采用柔性材料与无缝连续的结构设计,可以在极其狭窄和弯曲的空间中灵活运动。这类机器人尤其适合应用在医疗介入、工业检测、灾害救援等场景。例如,在神经血管介入治疗中,连续机器人能够沿复杂的血管路径前进,并携带医疗器械完成精准操作。在实验室研究生培养方面,学生们需要掌握运动冗余的理论知识,理解如何利用冗余自由度优化运动轨迹。同时,他们还需要熟悉机器人仿真软件(如Python Robotics Toolbox),并能通过操作协作机器人(如Franka机器人)来验证理论模型。CRL的研究不仅推动了新型机器人结构设计的发展,也为具身智能和下一代医疗机器人开辟了新思路。
 学生们在 Continuum 机器人实验室试用机器人
学生们在 Continuum 机器人实验室试用机器人
除了上述团队之外,多伦多大学机器人研究所还汇集了众多在无人驾驶、机器学习、触觉感知、群体机器人、软体机器人、AI驱动的控制系统等方面的研究力量。由于篇幅有限,PNP机器人在这里不再逐一展开,但可以肯定的是,UTRI已经形成了涵盖从理论算法、机器人硬件到实际应用的完整研究链条,是加拿大乃至北美地区机器人研究最为综合性的科研中心之一。
2,2025年多伦多机器人大会
2025年7月15日至16日,多伦多大学机器人研究所在其密西沙加校区(University of Toronto Mississauga, UTM)成功举办了2025年多伦多机器人大会。
这场为期两天的双轨制学术盛会,汇聚了来自加拿大、美国、欧洲及亚洲的顶尖机器人学者、产业领袖以及青年研究人员。会议的核心主题聚焦于“人工智能驱动下的移动与操作机器人”,强调了从手术室到外太空的跨场景机器人应用探索。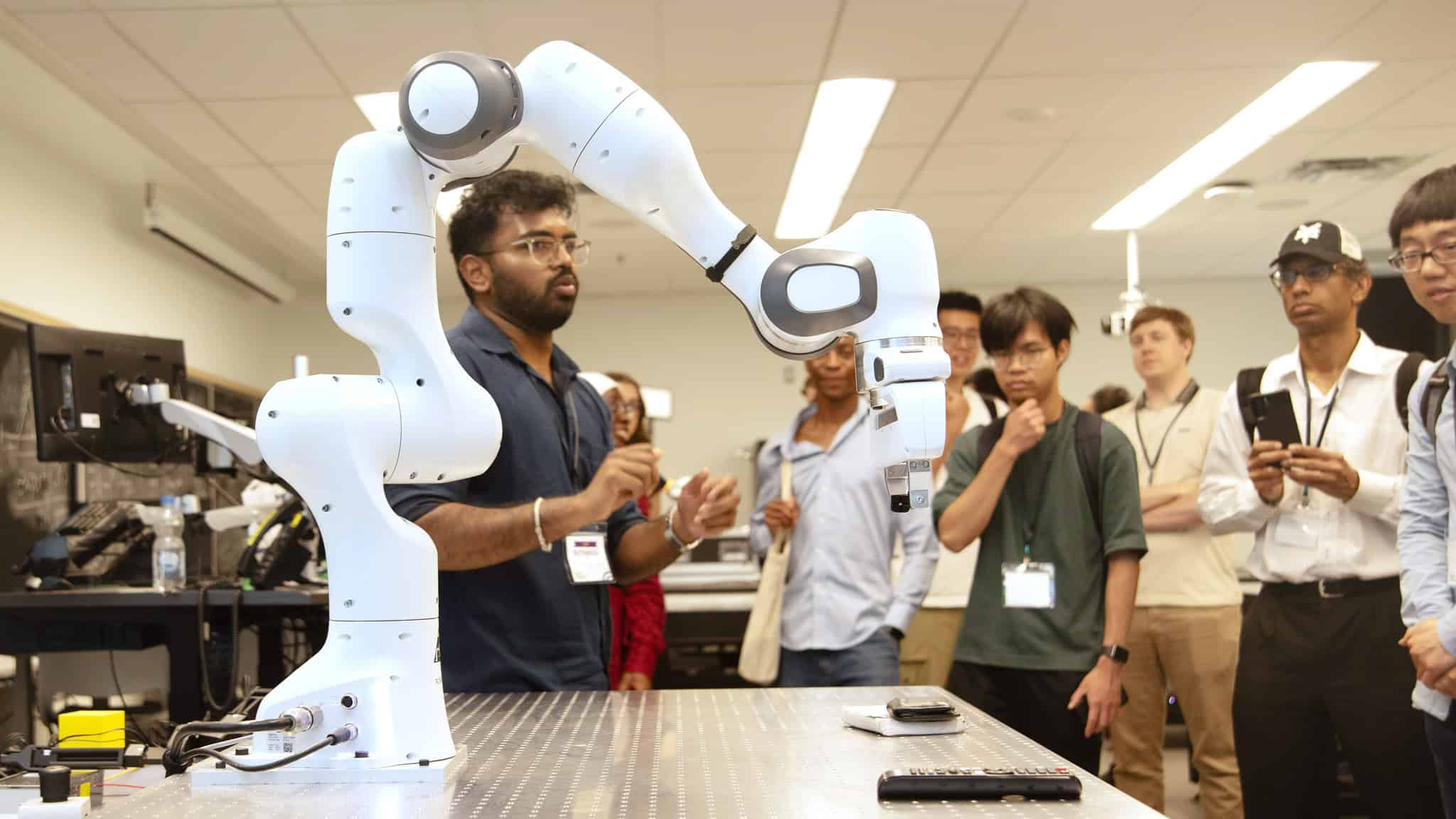
从手术机器人到自动驾驶汽车——多伦多大学密西沙加分校本月展示了最新的人工智能机器人研究
PNP机器人注意到,会议以主题演讲、专题论坛、技术展示和学生竞赛相结合的形式展开。在主题演讲环节,多伦多大学的研究人员展示了他们如何构建智能机器来解决现实世界中的关键问题。例如,医疗机器人团队展示了Franka机器人在腔镜微创手术中的遥操作案例,强调机器人在精细操作和医生增强方面的巨大潜力;空间机器人小组则介绍了机器人在低重力环境下自主抓取与维修航天器的实验成果。
在专题论坛中,学术界与产业界代表围绕“具身智能的前沿与挑战”展开讨论。研究者提出,机器人不再只是执行预先编程的机械系统,而是逐渐具备了通过学习与交互不断适应环境的能力,这与近年来人工智能的深度发展密切相关。产业界的代表则强调机器人落地应用的可扩展性、安全性与伦理性,特别是在医疗和公共服务场景中的合规问题。
大会期间的技术展示部分也极具看点。PNP机器人作为FRANKA机器人战略合作(渠道、销售、支持)伙伴,看到多伦多大学展示了三款“引人注目”的机器人:一款医疗手术机器人原型,一款具备自主避障与导航的田间机器人,以及一款面向教育与研究的协作机器人平台(采用Franka机器人作为核心)。这些展示不仅体现了多伦多大学在多学科融合上的优势,也向与会者展现了机器人在真实场景下的应用前景。
此外,大会还特别设置了学生创新竞赛,鼓励本科生和研究生团队利用机器人平台开展原创项目。学生们基于UTM新建的本科机器人实验室,开发了包括机器人抓取、协作搬运、群体机器人协调等应用,展示了机器人教育与科研结合的成果。这也反映出多伦多大学在机器人教育方面的系统性布局——从基础教学到国际会议平台,形成了完整的学术生态。
可以说,这场会议不仅是学术交流的舞台,更是多伦多大学展示自身机器人研究与教育成果的重要窗口。它强化了多伦多大学在全球机器人研究版图中的地位,并为未来国际合作奠定了坚实的基础。
3,多伦多大学机器人研究和教学
多伦多大学在机器人研究与教学方面均有着卓越的表现,其优势不仅体现在研究所层面的跨学科整合,还体现在本科和研究生教育体系的系统建设。
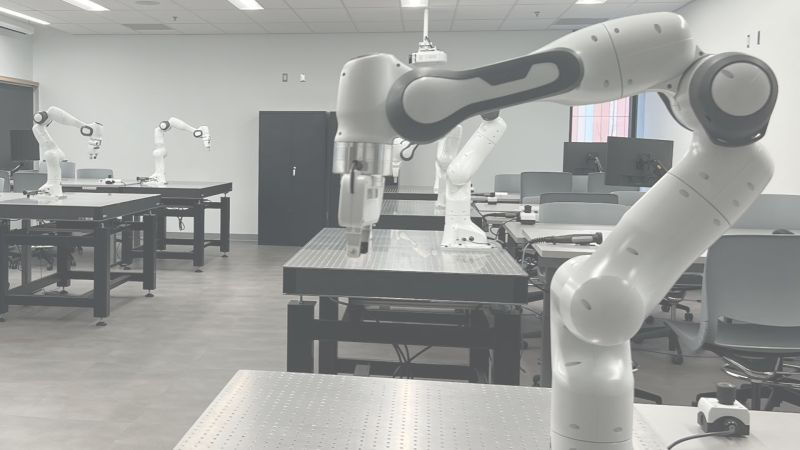 多伦多大学机器人实验室
多伦多大学机器人实验室
在计算机科学系,机器人项目被视为学科发展的重要组成部分,旨在推动机器人研究与教学的活力。作为机器人技术员(Robotics Technician),岗位职责涵盖本科教学实验室的建设与日常管理,包括与教师协调实验设置、实施教学项目、维护机器人硬件系统等。该实验室配备了七台协作机械臂(主要是Franka Panda机器人),以及一系列移动机器人和软体机器人。这些硬件为学生提供了丰富的实验条件,使他们能够将课堂上的理论知识转化为动手操作与实验探索。
 机器人技术员Ruthrash Hari在活动当天向来宾展示其中一只机械臂
机器人技术员Ruthrash Hari在活动当天向来宾展示其中一只机械臂
在实验室的支持下,学生能够参与机器人视觉抓取、运动规划、协作操作等项目,逐步建立对机器人系统的整体认知。这种教育模式强调“理论+实验”的结合,确保学生在毕业时具备扎实的动手能力与科研思维。
 Shay Fuchs 教授和 Jessica Burgner-Kahrs 教授正在与机械臂互动
Shay Fuchs 教授和 Jessica Burgner-Kahrs 教授正在与机械臂互动
数学与计算科学系同样在机器人教学方面具有创新性。该系设立了本科课程 CSC376H5F - 机器人学,并配备了7台Franka机器人作为主要教学平台。PNP机器人,作为FRANKA机器人战略合作方,也主推这一门面向计算机科学、人工智能等专业学生的机器人入门课程,为后续更高阶的机器人课程(如运动规划、智能控制、具身智能研究)奠定基础。课程的主要学习内容包括:
确定机器人的设计与分析其运动结构
了解并分析机器人的性能参数
使用DH约定建立串联机器人的正向运动学
利用指数乘积公式建立并实现机器人正向与速度运动学
推导串联机器人的逆运动学并进行数值计算
描述并实现基本的机器人控制概念
学习运动冗余的概念及其对机器人运动的影响
使用Python机器人仿真工具箱进行建模与仿真
实操协作机器人(如Franka机器人)的操作与编程
这种课程设计不仅让学生系统掌握机器人学的核心知识,还通过实际机器人平台培养了他们在具身智能时代所需的跨学科能力。与其他高校不同的是,多伦多大学的课程强调实验性与前沿性,例如利用机器人开展生命科学和化学合成的实验,让计算机科学、生命科学和工程学的交叉更加紧密。
 数学与计算科学系主任Ilia Binder;UTM副校长Alexandra Gillespie;UTM副校长兼教务长Amrita Daniere,共同剪彩
数学与计算科学系主任Ilia Binder;UTM副校长Alexandra Gillespie;UTM副校长兼教务长Amrita Daniere,共同剪彩
4,具身智能趋势下的机器人教学和研究
随着人工智能与机器人技术的深度融合,机器人学科逐渐演变为一个高度跨学科的领域,涵盖了计算机科学、机械工程、控制理论、认知科学、生命科学等多个学科。具身智能(Embodied Intelligence)作为新兴研究范式,强调机器人通过与物理世界的持续交互获得智能,这一理念已经成为全球机器人研究的重要趋势。PNP机器人作为 FRANKA 在国内的官方合作伙伴,负责其技术支持、渠道建设与销售,并基于 FRANKA 开发了一系列生态工具,如遥操作、视觉、移动平台等,具身智能方向如有部署需求,可联系 PNP机器人获取支持。
 FRANKA机器人和AI研究
FRANKA机器人和AI研究
在这一趋势下,PNP机器人认为,具有良好生态支持的协作机器人平台成为研究与教学的核心工具。其中,Franka机器人凭借其高精度力控、开源接口、易于编程和广泛的学术支持,成为国际顶尖高校和研究机构的首选平台,也是PNP机器人搭建具身智能平台核心机器人平台。它不仅能满足基础机器人学教学的需求,还能支撑前沿的具身智能研究。
 通用VLA范式Franka机器人全球具身智能研究框架
通用VLA范式Franka机器人全球具身智能研究框架
例如:
斯坦福大学 使用Franka机器人在模仿学习方向开展研究,特别是在遥操作数据采集和人机交互学习方面取得突破,为具身智能模型的训练提供了宝贵的真实数据。
加州大学伯克利分校 在强化学习与机器人操作的结合上走在世界前列,利用Franka机器人验证了基于深度学习的抓取、操控与多任务学习算法(参考PNP机器人知名AI实验室专题)。
多伦多大学 则将Franka机器人扩展到生命科学与化学合成领域,探索机器人在实验自动化与智能实验室中的角色。
慕尼黑工业大学(TUM) 的AI FACTORY旗舰项目,以Franka机器人为核心搭建大规模智能工厂实验平台,探索机器人在工业4.0和未来智能制造中的应用(参考PNP机器人知名AI实验室专题)。
英伟达IndustReal 算法、系统和工具:模拟是机器人学习新技能的重要工具。这些技能包括感知(通过摄像机图像理解世界)、规划(制定一系列动作来解决问题)和控制(生成运动指令来改变机器人的位置和方向)
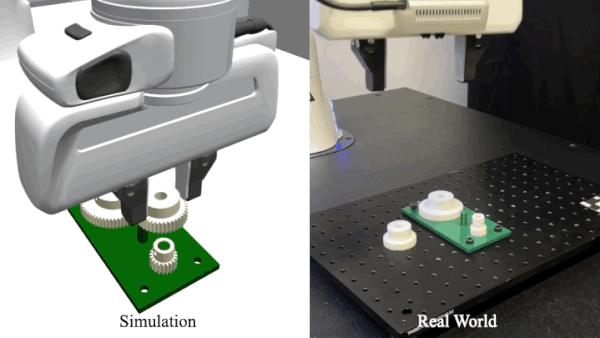 英伟达开发的将 RL 用于机器人装配
英伟达开发的将 RL 用于机器人装配
这些案例表明,Franka机器人不仅是一个教学工具,更是具身智能研究的国际通用平台。它的广泛使用促进了学术成果的共享和跨机构合作,加速了机器人智能化的发展。
总结
多伦多大学机器人研究所在加拿大乃至全球机器人研究领域具有重要地位。研究所依托跨学科优势,涵盖了自主田间机器人、医疗机器人、先进制造业等多个方向,并积极推动具身智能与人工智能技术的深度融合。PNP机器人看到:通过举办国际机器人大会,建立完善的本科与研究生教学体系,以及利用Franka机器人这一国际主流平台,多伦多大学在机器人科研与教育的结合上走在了世界前列。可以预见,随着具身智能的发展浪潮,UTRI将继续发挥加拿大机器人研究龙头作用,并与国际顶尖机构一道,共同推动机器人在医疗、农业、制造和科学研究等领域的广泛应用。PNP机器人认为Franka机器人也将在这一过程中,持续扮演“标准研究平台”的角色,成为新一代机器人科学家和工程师学习、实验与创新的重要工具。
原创/PNP机器人 侵权必究!

)
![[Vid-LLM] docs | 视频理解任务](http://pic.xiahunao.cn/[Vid-LLM] docs | 视频理解任务)

![[Java恶补day51] 46. 全排列](http://pic.xiahunao.cn/[Java恶补day51] 46. 全排列)



)







-理解笔记3)


