教程
分类原理和标定
原理
视频总结
双目相机和RGBD相机原理
作用
RGBD相机=RGB相机+深度;
RGB-D相机同时获取两种核心数据:RGB彩色图像和深度图像(Depth Image)。
1. RGB彩色图像
-
数据格式:
-
标准三通道矩阵(Height × Width × 3),通道顺序通常为Red-Green-Blue(RGB)。
-
每个像素值范围:0~255(8位)或0~65535(16位,高动态范围)。
-
-
用途:
-
物体颜色识别(如YOLO目标检测)
-
纹理特征提取(ORB/SIFT特征点匹配)
-
语义分割(Mask R-CNN)
-
2. 深度图像(Depth Image)
-
数据格式:
-
单通道矩阵(Height × Width × 1),每个像素值为物体到相机的垂直距离(单位:毫米/米)。
-
数据类型:
-
uint16(常见于ToF相机,如Kinect Azure,值=实际距离×缩放因子) -
float32(直接存储米制单位,如Realsense D455)
-
-
原理
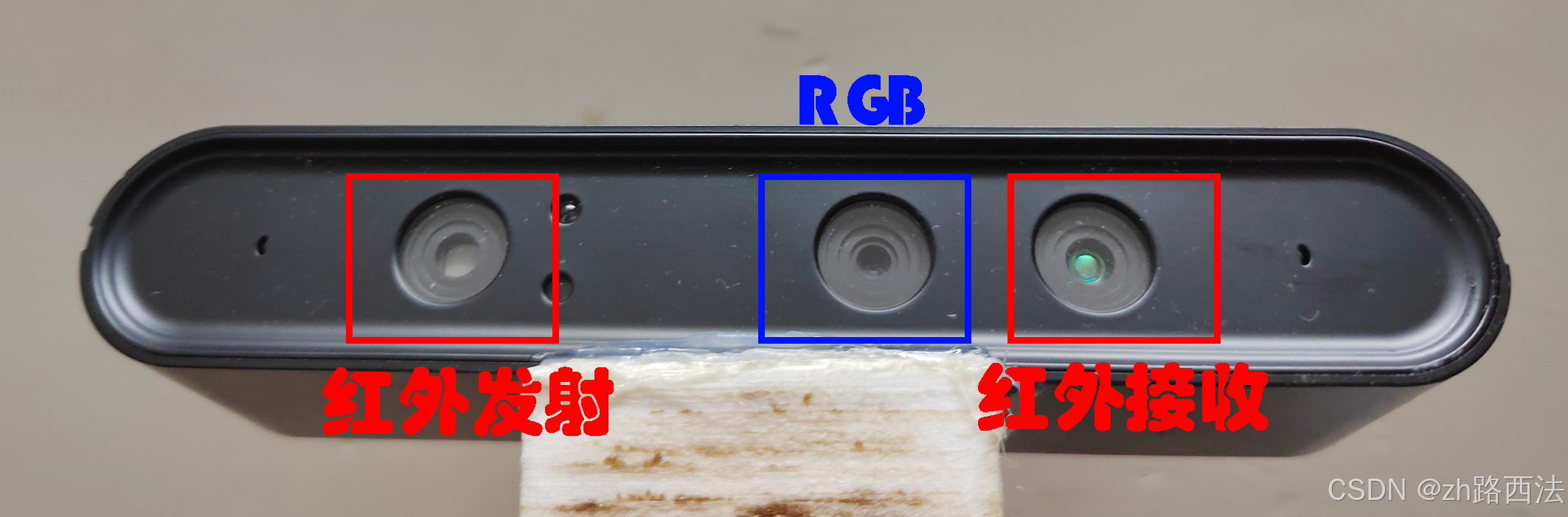
1,结构光(红外线ir)
结构光顾名思义就是将光结构化,有多种投影图案方式,如正弦条纹的相移法、二进制编码的格雷码、相移法+格雷码等。
为什么要将光结构化?
将光结构化是为了让这些用来测量的光具有一定数学结构,而这些结构光经过物体表面畸变之后,在经过红外摄像头接收,算法可以根据这些畸变的结构光的结构变化,结合三角公式计算出物体上各点和相机之间的位置和深度信息。
原理:
工作时,经过特定编码的光斑从投影仪投射到物体上,物体不同深度区域反射红外光,红外相机接收反射光,形成图片,经过解码,根据光斑的畸变情况,利用算法计算物体各点和相机平面的位置和深度信息。
单目结构光:有一个结构光发射器,一个结构光接收器

双目结构光:一个结构光发射器,两个结构光接收器,得到是两个红外图
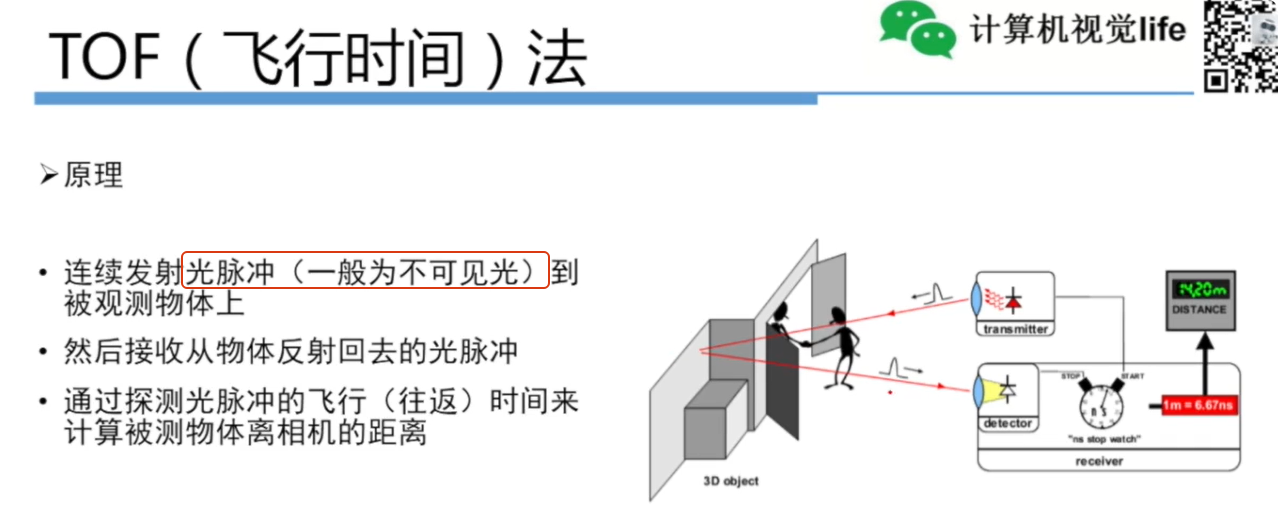
2,飞行时间(TOF)
脉冲发射器+定时器+脉冲接收器。
深度相机原理对比
链接
对比
双目立体相机
视觉差测量深度。
RGBD相机结构光
结构光畸变和三角测量原理计算获取位置和深度信息。
RGBD相机TOF
时间测量深度。





)













