技术背景
在智能制造高速发展的今天,工业机器人已经从单一的生产作业工具,转变为协作化、智能化的生产伙伴。无论是高精度的多关节机械臂、自主导航的移动机器人,还是与人协同工作的协作机器人,都越来越多地被应用于智能工厂、仓储物流、远程作业等关键领域。
随着机器人功能的不断增强,系统对远程视频监控与控制的需求也在不断升级。这不仅是为了满足运维管理、生产质检、远程协作等日常需求,更关系到生产过程中的即时响应能力与安全防护机制。
尤其是在如下典型场景中:
-
多关节机械臂在高风险环境下的远程遥控操作
-
移动机器人穿越复杂工况的路径规划与障碍检测
-
协作机器人与人工智能视觉系统的深度融合
-
工业无人车、自动巡检机器人对环境感知与反馈的实时性要求
对低延迟、高稳定性的视频传输提出了更为严苛的要求。在这样的应用背景下,如何在不牺牲视频质量的前提下,保障远程监控画面的流畅性与实时交互性,如何在多种网络环境下(有线/无线/5G/专网)维持稳定的传输效果,以及如何方便地将视频数据集成到工业控制系统和 AI 分析系统中,成为了工业机器人系统架构必须重点解决的技术挑战。
1️⃣ 工业机器人应用中的视频传输需求
在实际部署过程中,工业机器人常见的远程视频传输需求包括:
-
✅ 远程运维监控
-
✅ AI 视觉识别与质检
-
✅ 复杂环境下的手动远程操作
-
✅ 移动平台的路径规划与避障辅助
这些应用普遍要求:
-
低延迟(通常要求 <200ms,最好能100~200ms)
-
高稳定性(弱网下仍需保持流畅)
-
高分辨率支持(1080p / 4K 乃至 8K)
-
多协议兼容(RTSP / RTMP)
-
灵活的系统集成
2️⃣ RTSP 协议在工业机器人视频传输中的优势与适配性
在工业机器人系统中,视频传输通常需要具备 标准化、低延迟、易集成 的特性,RTSP(Real-Time Streaming Protocol,实时流传输协议)正是这样一种天然契合的协议方案。
RTSP 协议自诞生以来,广泛应用于音视频传输领域,具备以下关键优势:
-
📡 标准化协议,兼容性强
作为国际标准协议,RTSP 能够兼容市面上绝大多数摄像头、编码设备与媒体服务器,便于不同厂家、不同型号设备的互联互通。 -
💡 支持多种传输模式
可根据网络环境,灵活选择 TCP(可靠传输) 或 UDP(低延迟传输),也可与 RTP 协议结合实现媒体数据的高效封装,满足对稳定性或时效性的不同需求。 -
🛡 内建鉴权与加密机制
支持基本认证、摘要认证,结合 SSL/TLS 可实现传输加密,为工业生产环境下的视频数据安全保驾护航。 -
🎯 适合局域网、专网及工业物联网场景
无论是本地局域网环境下的高速视频回传,还是通过专网、5G 工业专线的远程控制,RTSP 都能灵活适配,支持稳定的跨网络视频传输。
在工业机器人典型应用中,无论是机械臂抓取、移动机器人导航,还是远程智能巡检,设备本体通常配备有内置或外挂摄像头,负责实时采集视频流。
这些视频流大多通过 RTSP 协议 向控制中心或操作终端推送,系统播放端因此需要具备以下能力:
-
🚀 快速拉流与自动重连
在设备启动或网络波动时,能够迅速建立连接、异常后自动恢复,保证监控画面的连续性。 -
🔄 TCP/UDP 自动切换
针对网络状况变化,具备智能切换传输模式的能力,确保在可靠性与延迟之间达到最佳平衡。 -
🎥 低延迟解码与实时渲染
播放器端必须支持硬解码、快启动、低缓冲技术,最大限度降低解码与显示的系统延迟,满足远程控制与实时反馈的严苛需求。
RTSP 协议的这些特性,使其在工业机器人应用中,成为远程视频传输的首选方案。
配合高性能播放器 SDK,可以帮助开发者快速构建起一套稳定、可靠的低延迟视频监控链路,为智能制造与工业自动化赋能。
3️⃣ 高性能 RTSP 播放器 SDK 在工业应用中的核心价值
在工业机器人系统的远程控制与监控场景中,视频播放端不仅承担着“观看”的功能,更是系统响应、智能决策与安全保障的重要一环。
使用具备工业级特性的 专业 RTSP 播放器 SDK,能够有效提升系统的开发效率与运行稳定性,为工业场景带来以下关键价值,通过集成大牛直播RTSP播放器 SDK,系统开发者可以获得:
-
稳定可靠的低延迟视频传输能力
-
弹性可控的播放参数配置
-
灵活高效的渲染与数据处理能力
-
适配多种工业应用场景的高可扩展性
这不仅能够显著缩短项目开发周期,还能帮助工业机器人系统在各种复杂工况下,始终保持高性能的视频传输与交互体验。
🎥 软解码/硬解码自由切换
支持 纯软件解码 与 硬件加速解码,可根据终端设备性能、解码需求灵活切换。
在高性能终端或移动设备上,利用硬件加速能显著降低 CPU 占用,提升续航与响应速度。
⚡ 超低延迟模式与快速启动机制
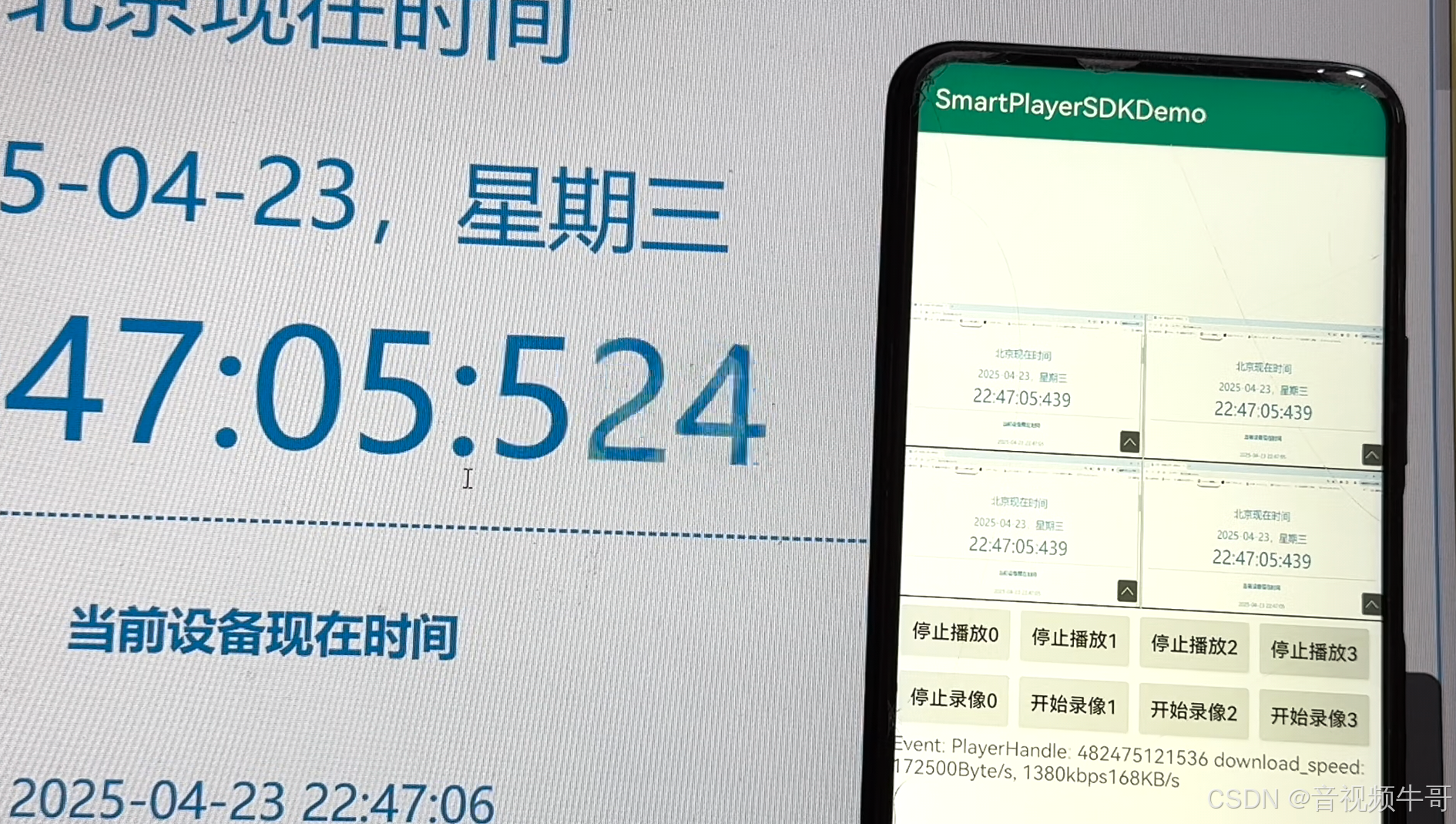
Windows和安卓播放RTSP和RTMP流延迟测试
内置 低延迟播放模式 与 快启动优化算法,通过智能缓冲管理和流控策略,能够有效降低播放延时。
适用于工业机器人远程控制、AI 视觉联动等需要实时反馈的关键场景。
🖥 自定义渲染与共享纹理支持
支持 OpenGL、Unity3D 等图形框架的 自定义渲染,通过共享纹理可实现 GPU 级别的视频数据交互。
这对于工业机器人与 AR 视觉、Unity 控制界面的集成,提供了极高的灵活性和扩展性。
🔧 灵活全面的播放控制接口
支持丰富的播放参数配置,包括:
-
缓冲控制(动态调节播放缓冲)
-
画面旋转、镜像反转
-
分辨率、下载速度、缓冲进度的实时回调
-
视频 SEI 数据、YUV 数据、音视频数据回调(方便与 AI 视觉分析系统对接)
这些功能,助力开发者根据工业现场实际需求,灵活调整播放策略,提升系统响应性。
📡 弱网环境下的传输优化
播放器内置 TCP/UDP 自动切换 与 异常重连机制,即使在弱网、复杂工业专网环境下,也能保证视频拉流的稳定性与流畅性。
智能检测机制可在网络环境变化时自动调整传输策略,极大降低了断流和重连带来的业务中断风险。
📸 实时截图与录像功能
支持一键截图、自动录像与录制文件分段管理,方便在远程监控、质检留存、异常取证等场景下,进行视频数据的留存与后续分析。
4️⃣ 工业机器人场景下的 RTSP 播放器集成实战
在机器人系统中实现 稳定、低延迟的视频回传链路,不仅仅是“能播放”那么简单,更要求在软硬件层面协同优化。以下是大牛直播SDK的SmartPlayer基于高性能 RTSP 播放器 SDK 的核心集成思路,已在多种工业机器人场景中得到应用验证:
🛠 核心功能设计
✅ 1. 机器人端启动 RTSP 视频服务
-
机器人侧嵌入式计算单元,部署视频编码模块
-
通过 RTSP Server(可内嵌或外挂)将实时画面推流
-
支持 TCP/UDP 兼容传输,必要时启用鉴权保护
✅ 2. 控制端(如移动设备/工业平板)集成 RTSP 播放器 SDK
-
引入 SDK,快速集成播放器模块
-
支持 Android / iOS / Unity3D 等多平台应用
-
无需自行处理解码、渲染、网络协议,SDK 一站式封装
✅ 3. 播放器性能调优(低延迟配置示例)
-
⚡ 实际场景中,经测试该配置下,可实现100-200ms低延迟播放
-
⚡ 适用于远程控制、路径规划辅助、视频监控场景
✅ 4. 播放过程中的事件监测与异常处理
播放器 SDK 内建全链路事件上报机制,可通过代理回调实时获取状态:
-
✅ 可在事件回调中处理网络异常、自动重连、状态提示
-
✅ 有效保障监控链路的稳定性与业务连续性
✅ 5. 视频数据回调接入 AI 模型或控制逻辑
播放器 SDK 支持 YUV 数据回调,开发者可在业务层进行:
-
目标检测、缺陷识别、轨迹追踪
-
视频智能分析、异常检测
-
结合 OpenCV / AI 模型的实时处理
✅ 技术集成总结
| 功能模块 | 应用价值 |
|---|---|
| 播放器低延迟调优 | 确保实时监控与远程控制的交互性 |
| 异常事件监测与重连 | 提高系统稳定性,降低断流风险 |
| 视频数据回调与 AI 集成 | 实现智能分析与自主决策 |
接口设计
| Android RTSP|RTMP播放端SDK接口详解 | |||
| 调用描述 | 接口 | 接口描述 | |
| 最先调用,如成功返回播放实例 | SmartPlayerOpen | player初始化,设置上下文信息,返回player句柄 | |
| Event回调 | SetSmartPlayerEventCallbackV2 | 设置event callback | |
| 硬解码设置(H.264) | SetSmartPlayerVideoHWDecoder | 设置是否用H.264硬解码播放,如硬解码不支持,自动适配到软解码 | |
| 硬解码设置(H.265) | SetSmartPlayerVideoHevcHWDecoder | 设置是否用H.265硬解码播放,如硬解码不支持,自动适配到软解码 | |
| 视频画面 填充模式 | SmartPlayerSetRenderScaleMode | 设置视频画面的填充模式,如填充整个view、等比例填充view,如不设置,默认填充整个view | |
| 设置SurfaceView模式下render类型 | SmartPlayerSetSurfaceRenderFormat | 设置SurfaceView模式下(NTRenderer.CreateRenderer第二个参数传false的情况),render类型 0: RGB565格式,如不设置,默认此模式; 1: ARGB8888格式 | |
| 设置SurfaceView模式下抗锯齿效果 | SmartPlayerSetSurfaceAntiAlias | 设置SurfaceView模式下(NTRenderer.CreateRenderer第二个参数传false的情况),抗锯齿效果,注意:抗锯齿模式开启后,可能会影像性能,请慎用 | |
| 设置播放的surface | SmartPlayerSetSurface | 设置播放的surface,如果为null,则播放纯音频 | |
| 设置视频硬解码下Mediacodec自行绘制模式 | SmartPlayerSetHWRenderMode | 此种模式下,硬解码兼容性和效率更好,回调YUV/RGB、快照和图像等比例缩放功能将不可用 | |
| 更新硬解码surface | SmartPlayerUpdateHWRenderSurface | 设置更新硬解码surface | |
| 音频回调 | YUV/RGB | SmartPlayerSetExternalRender | 提供解码后YUV/RGB数据接口,供用户自己render或进一步处理(如视频分析) |
| Audio | SmartPlayerSetExternalAudioOutput | 回调audio数据到上层(供二次处理之用) | |
| audio输出类型 | SmartPlayerSetAudioOutputType | 如果use_audiotrack设置为0,将会自动选择输出设备,如果设置为1,使用audiotrack模式,一对一回音消除模式下,请选用audiotrack模式 | |
| Video输出类型 | NTRenderer.CreateRenderer(上层demo内) | 第二个参数,如果是true,用openGLES绘制,false则用默认surfaceView | |
| 播放模式 | 缓冲时间设置 | SmartPlayerSetBuffer | 设置播放端缓存数据buffer,单位:毫秒,如不需buffer,设置为0 |
| 首屏秒开 | SmartPlayerSetFastStartup | 设置快速启动后,如果CDN缓存GOP,实现首屏秒开 | |
| 低延迟模式 | SmartPlayerSetLowLatencyMode | 针对类似于直播娃娃机等期待超低延迟的使用场景,超低延迟播放模式下,延迟可达到200~400ms | |
| 快速切换URL | SmartPlayerSwitchPlaybackUrl | 快速切换播放url,快速切换时,只换播放source部分,适用于不同数据流之间,快速切换(如娃娃机双摄像头切换或高低分辨率流切换) | |
| RTSP TCP/UDP模式设置 | SmartPlayerSetRTSPTcpMode | 设置RTSP TCP/UDP模式,如不设置,默认UDP模式 | |
| RTSP超时时间设置 | SmartPlayerSetRTSPTimeout | 设置RTSP超时时间,timeout单位为秒,必须大于0 | |
| 设置RTSP TCP/UDP自动切换 | SmartPlayerSetRTSPAutoSwitchTcpUdp | 对于RTSP来说,有些可能支持rtp over udp方式,有些可能支持使用rtp over tcp方式 为了方便使用,有些场景下可以开启自动尝试切换开关, 打开后如果udp无法播放,sdk会自动尝试tcp, 如果tcp方式播放不了,sdk会自动尝试udp. | |
| 设置RTSP用户名和密码 | SetRTSPAuthenticationInfo | 如果RTSP URL已包含用户名和密码, 此接口设置的用户名和密码将无效. 就是说要用这个接口设置的用户名和密码去做认证, RTSP URL不能包含用户名和密码. | |
| 实时静音 | SmartPlayerSetMute | 实时静音 | |
| 设置播放音量 | SmartPlayerSetAudioVolume | 播放端音量实时调节,范围[0,100],0时为静音,100为原始流数据最大音量 | |
| 设置是否禁用 Enhanced RTMP | DisableEnhancedRTMP | disable enhanced RTMP, SDK默认是开启enhanced RTMP的 | |
| 实时截图 | CaptureImage | 支持JPEG和PNG两种格式 | |
| 视频镜像旋转 | 旋转 | SmartPlayerSetRotation | 设置顺时针旋转, 注意除了0度之外, 其他角度都会额外消耗性能,当前支持 0度,90度, 180度, 270度 旋转 |
| 水平反转 | SmartPlayerSetFlipHorizontal | 设置视频水平反转 | |
| 垂直反转 | SmartPlayerSetFlipVertical | 设置视频垂直反转 | |
| 设置URL | SmartPlayerSetUrl | 设置需要播放或录像的RTMP/RTSP url | |
| 开始播放 | SmartPlayerStartPlay | 开始播放RTSP/RTMP流 | |
| 停止播放 | SmartPlayerStopPlay | 停止播放RTSP/RTMP流 | |
| 关闭播放实例 | SmartPlayerClose | 结束时必须调用close接口释放资源 | |
功能支持
- 音频:AAC/Speex(RTMP)/PCMA/PCMU;
- 视频:H.264、H.265;
- 播放协议:RTSP|RTMP;
- 支持纯音频、纯视频、音视频播放;
- 支持多实例播放;
- 支持软解码,特定机型硬解码;
- 支持RTSP TCP、UDP模式设置;
- 支持RTSP TCP、UDP模式自动切换;
- 支持RTSP超时时间设置,单位:秒;
- 支持buffer时间设置,单位:毫秒;
- 支持超低延迟模式;
- 支持断网自动重连、视频追赶,支持buffer状态等回调;
- 支持视频view实时旋转(0° 90° 180° 270°);
- 支持视频view水平反转、垂直反转;
- 支持Surfaceview/OpenGL ES/TextureView绘制;
- 支持视频画面填充模式设置;
- 音频支持AudioTrack、OpenSL ES模式;
- 支持jpeg、png实时截图;
- 支持实时音量调节;
- 支持解码前音视频数据回调;
- 支持解码后YUV/RGB数据回调;
- 支持Enhanced RTMP;
- 支持扩展录像功能;
-
支持Android 5.1及以上版本。
通过 SDK 的完整功能与灵活的接口,开发者能够高效构建面向工业场景的远程监控与智能控制系统,大大缩短开发周期,提升产品竞争力。
5️⃣ 工业机器人典型应用场景与技术价值
无论是工业生产线、智慧物流,还是高危环境下的远程操控,稳定、低延迟的视频回传与智能播放能力,都是工业机器人系统安全高效运行的重要基础。结合大牛直播SDK的高性能 RTSP 播放器 SDK,可以为各类工业机器人应用场景提供专业级的远程视频解决方案,助力工业智能化与远程协作的全面升级。
🔧 工业机械臂远程调试
需求:高精度动作控制、远程参数调优、异常工况实时监控
优势:超低延迟视频回传(100-200ms),保障调试过程的精准响应;稳定的 RTSP 拉流能力,支持自动重连;结合事件回调机制,可实现远程故障监测与报警联动
🚗 移动机器人视频巡检
需求:复杂路径导航、环境感知与避障、无人值守远程监控
优势:RTSP 实时流在弱网环境下依旧保持高稳定性;具备 TCP/UDP 自动切换与异常重连能力,保证巡检过程不中断;可支持多终端同步监控,满足指挥中心与前端协作需求
🤖 协作机器人安全监控
需求:人机协作环境中的风险监测、异常作业预警、远程协同操作
优势:支持多终端接入与多路 RTSP 流同步播放,便于多角色协同;通过共享纹理与 AR 系统集成,增强操作反馈体验;可与控制系统对接,实现作业过程全程可视
🏭 智能产线 AI 质检
需求:生产过程中的缺陷检测、产品质量追溯、生产数据留存与分析
优势:提供 YUV 数据回调接口,方便接入 AI 分析模块;支持实时截图与录像,助力质检与生产档案管理;兼容工业视觉系统,支持高分辨率与高速处理
🛡 高风险作业环境下的远程操作
需求:高温、有毒、辐射等危险环境的远程监控与机器人操作
优势:低延迟视频回传为操控人员提供实时视觉反馈,保障作业安全;具备自动重连与异常状态上报,降低突发风险,提高作业可靠性
6️⃣ 技术总结
在工业机器人领域,稳定、低延迟的视频传输不仅是远程监控的基本需求,更是保障生产安全、实现智能控制与提升作业效率的重要基础。借助大牛直播SDK的专业级 RTSP 播放器 SDK,开发者可以高效构建出满足工业级应用要求的视频回传链路,具备以下核心价值:
-
实现毫秒级的低延迟视频传输,满足远程操控与实时监控的严苛要求
-
在多种网络环境下保持高稳定性,支持弱网自适应与异常自动重连
-
提供丰富的接口与数据回调,方便与 AI 视觉分析、智能决策系统深度融合
-
支持跨平台集成,便于快速部署在多终端、多系统的工业控制架构中
高性能播放器 SDK,不只是视频播放的工具,更是工业机器人系统中数据感知、智能交互与远程控制的重要支撑模块。
✅ 未来技术探索方向
🎯 Unity3D引擎下的低延迟播放器集成
结合三维仿真引擎,构建沉浸式的工业监控与远程操作界面,增强操作可视化体验
🎯 与 AI 边缘计算框架的协同应用
在终端侧接入实时视频分析与智能预警,提升工业机器人对复杂环境的自适应能力
🎯 跨网络环境下的远程控制与视频同步
结合穿透技术与视频同步机制,支持全球化运维与异地远程协作,打破物理空间的限制
视频技术与工业机器人深度融合,正在推动智能制造、智慧运维与工业自动化的变革。持续关注底层集成技术与视频传输优化策略,将是开发者与系统集成商在工业智能时代中脱颖而出的关键。






![[学习] 笛卡尔坐标系的任意移动与旋转详解](http://pic.xiahunao.cn/[学习] 笛卡尔坐标系的任意移动与旋转详解)






)




—— Qt系统相关)
)