BisenetV1/2网络以及模型推理转换
文章目录
- BisenetV1/2网络以及模型推理转换
- 1 BiSenetV1
- 1.1 Contex Path
- 1.2 Spatial Path
- 1.3 ARM
- 1.4 FFM
- 1.5 backbone
- 2 模型推理代码流程分析
- 2.1 加载模型
- 2.2 模型推理
- ① 转换张量
- ② 输入尺寸调整
- ③ 模型推理
- ④ 输出尺寸还原
- ⑤ 类别预测
- ⑥ 保存绘制
- ⑦ 关于视频流
- 3 pth转onnx
- 3.1 为什么要转换
- 3.2 转换代码
- 3.3 转换测试
- 4 onnx转MNN
- 4.1 编译MNN库
- 4.2 模型推理测试
- 5 BisenetV2测试
- 6 tee工具
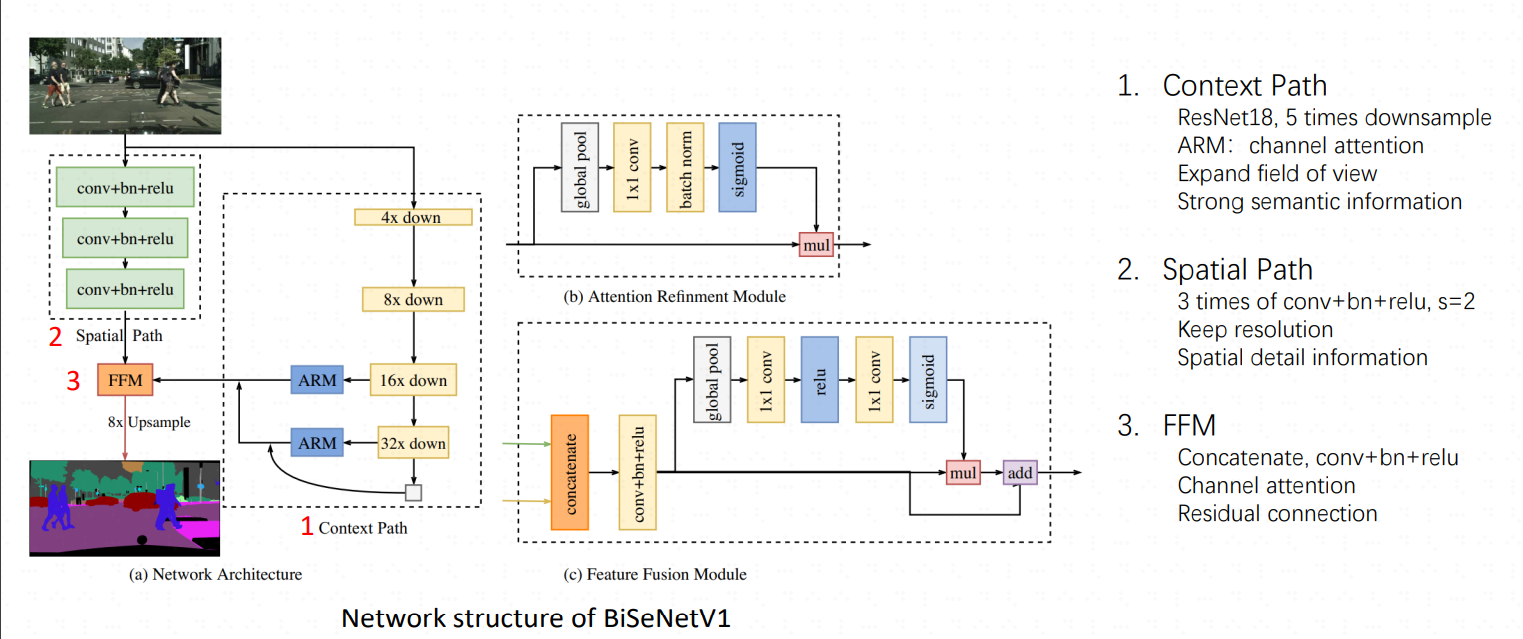
1 BiSenetV1
相关开源地址,eg1,
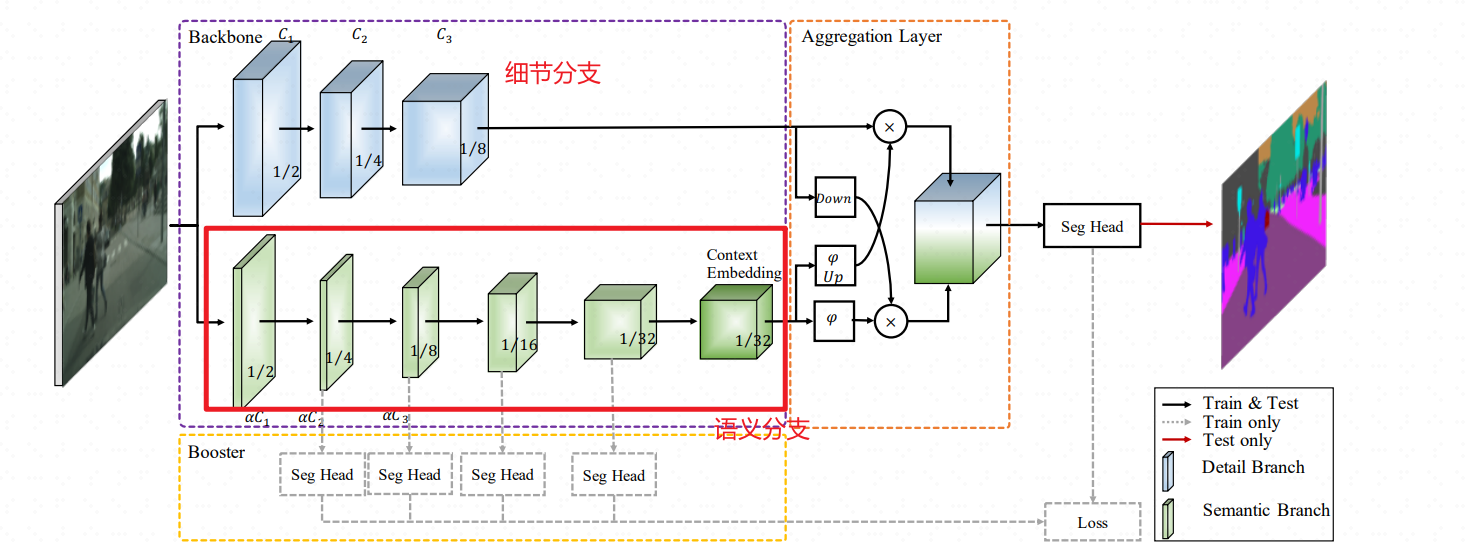
为了加速模型推理,很多模型裁剪图像尺寸、剪枝卷积网络通道、卷积步骤数等,这样损失了空间信息以及相应的感受野,BiSenet这个网络选择融合SP和CP两个通道来实现加速
class BiSeNetV1(nn.Module):def __init__(self, n_classes, aux_mode='train', *args, **kwargs):super(BiSeNetV1, self).__init__()self.cp = ContextPath()self.sp = SpatialPath()self.ffm = FeatureFusionModule(256, 256)self.conv_out = BiSeNetOutput(256, 256, n_classes, up_factor=8)self.aux_mode = aux_modeif self.aux_mode == 'train':self.conv_out16 = BiSeNetOutput(128, 64, n_classes, up_factor=8)self.conv_out32 = BiSeNetOutput(128, 64, n_classes, up_factor=16)self.init_weight()def forward(self, x):H, W = x.size()[2:]feat_cp8, feat_cp16 = self.cp(x)feat_sp = self.sp(x)feat_fuse = self.ffm(feat_sp, feat_cp8)feat_out = self.conv_out(feat_fuse)if self.aux_mode == 'train':feat_out16 = self.conv_out16(feat_cp8)feat_out32 = self.conv_out32(feat_cp16)return feat_out, feat_out16, feat_out32elif self.aux_mode == 'eval':return feat_out,elif self.aux_mode == 'pred':# feat_out = feat_out.argmax(dim=1)feat_out = CustomArgMax.apply(feat_out, 1)return feat_outelse:raise NotImplementedErrordef init_weight(self):for ly in self.children():if isinstance(ly, nn.Conv2d):nn.init.kaiming_normal_(ly.weight, a=1)if not ly.bias is None: nn.init.constant_(ly.bias, 0)def get_params(self):wd_params, nowd_params, lr_mul_wd_params, lr_mul_nowd_params = [], [], [], []for name, child in self.named_children():child_wd_params, child_nowd_params = child.get_params()if isinstance(child, (FeatureFusionModule, BiSeNetOutput)):lr_mul_wd_params += child_wd_paramslr_mul_nowd_params += child_nowd_paramselse:wd_params += child_wd_paramsnowd_params += child_nowd_paramsreturn wd_params, nowd_params, lr_mul_wd_params, lr_mul_nowd_params
1.1 Contex Path
上下文通道是的backbone基于Resnet18去实现的
# 上下文path
class ContextPath(nn.Module):def __init__(self, *args, **kwargs):super(ContextPath, self).__init__()self.resnet = Resnet18() # 调用残差网络 resnet.pyself.arm16 = AttentionRefinementModule(256, 128)self.arm32 = AttentionRefinementModule(512, 128)self.conv_head32 = ConvBNReLU(128, 128, ks=3, stride=1, padding=1)self.conv_head16 = ConvBNReLU(128, 128, ks=3, stride=1, padding=1)self.conv_avg = ConvBNReLU(512, 128, ks=1, stride=1, padding=0)self.up32 = nn.Upsample(scale_factor=2.)self.up16 = nn.Upsample(scale_factor=2.)self.init_weight()def forward(self, x):# 下采样的特征是通过残差网络Resnet18得到的feat8, feat16, feat32 = self.resnet(x)avg = torch.mean(feat32, dim=(2, 3), keepdim=True)avg = self.conv_avg(avg)feat32_arm = self.arm32(feat32)feat32_sum = feat32_arm + avgfeat32_up = self.up32(feat32_sum) # 原来下采样,现在上采样恢复feat32_up = self.conv_head32(feat32_up)feat16_arm = self.arm16(feat16)feat16_sum = feat16_arm + feat32_up # 两次采样相加feat16_up = self.up16(feat16_sum)feat16_up = self.conv_head16(feat16_up)return feat16_up, feat32_up # x8, x16 feat16_up就是最终的输出
1.2 Spatial Path
空间通道比较简单
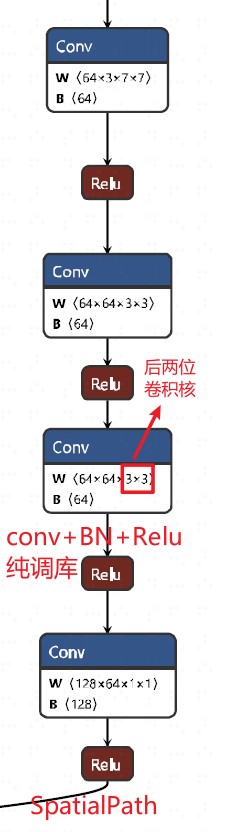
class SpatialPath(nn.Module):def __init__(self, *args, **kwargs):# super() 函数用于调用父类nn.Module的方法,这里调用了调用了 nn.Module 的构造函数# super() 函数的第一个参数是当前类(SpatialPath)# super() 第二个参数是当前类的实例(self)super(SpatialPath, self).__init__() self.conv1 = ConvBNReLU(3, 64, ks=7, stride=2, padding=3) # 卷积核大小为7x7,步长为2,填充为3self.conv2 = ConvBNReLU(64, 64, ks=3, stride=2, padding=1)self.conv3 = ConvBNReLU(64, 64, ks=3, stride=2, padding=1)self.conv_out = ConvBNReLU(64, 128, ks=1, stride=1, padding=0)self.init_weight() # 初始化权重def forward(self, x): # x 是输入数据,通常是一个四维张量,形状为 (batch_size, channels, height, width)# 定义前向传播过程----卷积计算feat = self.conv1(x)feat = self.conv2(feat)feat = self.conv3(feat)feat = self.conv_out(feat)return feat
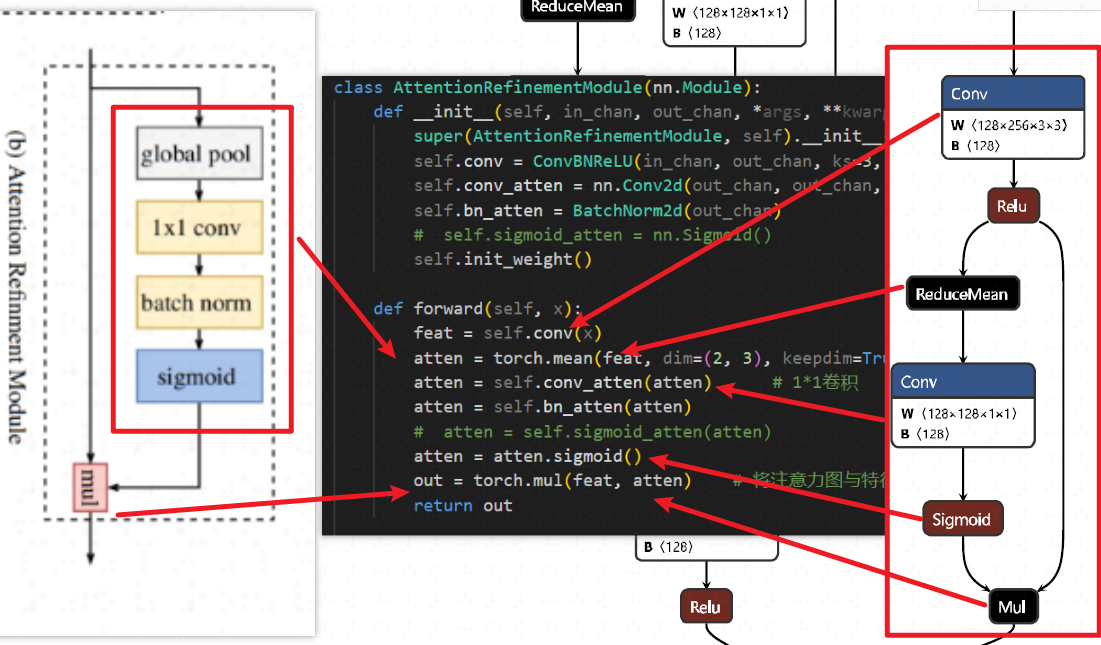
1.3 ARM
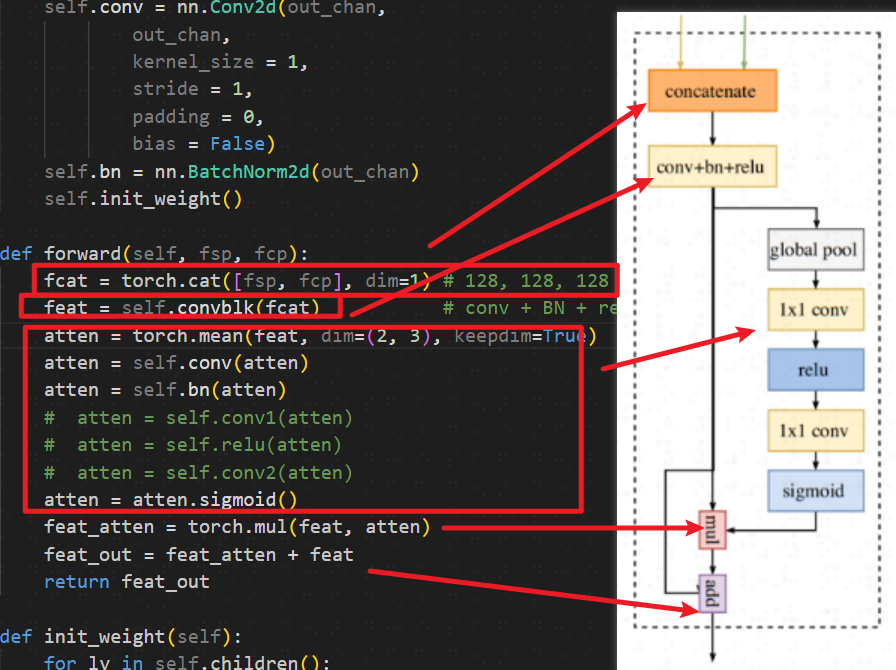
1.4 FFM
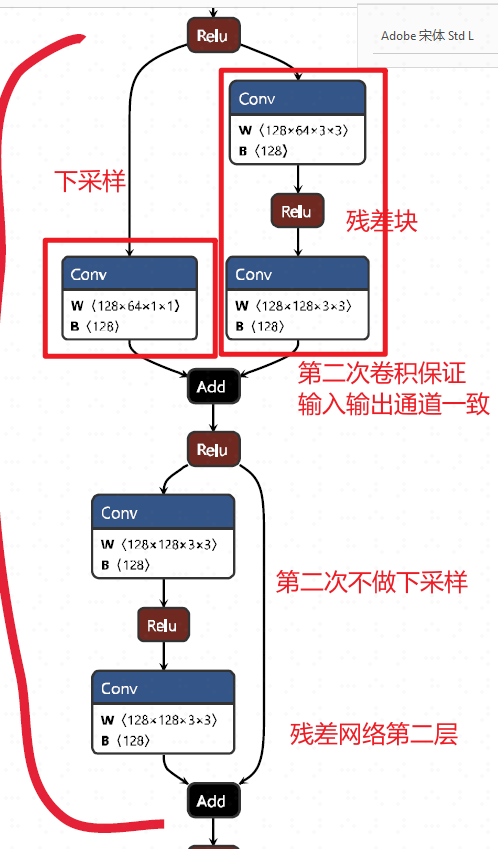
1.5 backbone
这里使用的是resnet网络,可视化残差网络第二层
2 模型推理代码流程分析
2.1 加载模型
net = model_factory[cfg.model_type](cfg.n_cats, aux_mode='eval')
net.load_state_dict(torch.load(args.weight_path, map_location='cpu'), strict=False)
net.eval() # 设置为推理模式
net.cuda() # 将模型加载到GPU上
2.2 模型推理
① 转换张量
对于一张图像
# prepare data
to_tensor = T.ToTensor(mean=(0.3257, 0.3690, 0.3223), # city, rgbstd=(0.2112, 0.2148, 0.2115),
)
im = cv2.imread(args.img_path)[:, :, ::-1] # [:, :, ::-1] 将 BGR 格式转换为 RGB(因 OpenCV 默认读取为 BGR,而PyTorch需要 RGB)
im = to_tensor(dict(im=im, lb=None))['im'].unsqueeze(0).cuda() # 按均值 mean=(0.3257, 0.3690, 0.3223) 和标准差 std=(0.2112, 0.2148, 0.2115) 对图像进行标准化(逐通道操作)# PyTorch 模型通常接受批处理输入(即使只有一张图像),格式为 [B, C, H, W]。如果没有 unsqueeze(0),模型会因维度不匹配而报错。假设输入图像经过 ToTensor 转换后的形状是 [C, H, W](通道、高度、宽度):原始 Tensor:(3, 224, 224) (RGB 图像,3 通道,224x224 分辨率)
unsqueeze(0) 后:(1, 3, 224, 224) (添加了 batch 维度,表示 batch_size=1)
对于视频流,那么这里的B就会变大,比如一次处理列表里面的8帧,就是一个批次8帧
② 输入尺寸调整
im = F.interpolate(im, size=new_size, align_corners=False, mode='bilinear')
- 作用:将输入图像
im的尺寸调整为new_size(之前计算的32的倍数,如512x704)。 - 参数说明:
size=new_size:目标尺寸(高度和宽度)。mode='bilinear':使用双线性插值(平衡速度和质量)。align_corners=False:避免边缘像素对齐问题(推荐设置)。
- 为什么需要调整输入尺寸?
确保输入尺寸符合模型的架构要求(如全卷积网络需要尺寸能被下采样因子整除)。
③ 模型推理
out = net(im)[0]
-
作用:将调整后的图像输入模型
net,获取输出。 -
[0]的含义:如果模型返回多个输出(如主输出 + 辅助头输出),[0]表示只取主输出。例如:
- 输出形状可能是
[B, C, H, W](Batch, 类别数, 高, 宽)。 - 若
B=1(单张图像),out的形状为[C, H, W]。
- 输出形状可能是
④ 输出尺寸还原
out = F.interpolate(out, size=org_size, align_corners=False, mode='bilinear')
- 作用:将模型输出的特征图
out插值回原始图像尺寸org_size(如480x640)。 - 为什么需要还原尺寸?
- 模型输出的分辨率通常比输入低(因下采样),需还原到原始尺寸以便后续处理(如可视化或评估)。
- 例如:
- 输入尺寸:
512x704→ 模型输出:16x22(下采样32倍)→ 插值回480x640。
- 输入尺寸:
⑤ 类别预测
out = out.argmax(dim=1) # 张量模式,每一个像素值都是一种类别,用相应的数字表示!
- 作用:对特征图
out沿类别维度(dim=1)取argmax,得到每个像素的预测类别。 - 输入输出形状:
- 输入
out:[C, H, W](C是类别数,如分割任务有20类)。 - 输出
out:[H, W],每个像素值为0到C-1的整数(表示类别ID)。
- 输入
- 示例:
如果C=3(3类:背景、猫、狗),out的每个像素值会是0、1或2。
⑥ 保存绘制
先转换张量
out = out.squeeze().detach().cpu().numpy() # 将张量转换为NumPy数组
pred = palette[out]# 生成256*3的数组,每个数处于0-255之间
palette = np.random.randint(0, 256, (256, 3), dtype=np.uint8) # 一个预定义的调色板(颜色映射表),形状为 [num_classes, 3],等价下面
palette = np.array([ [0, 0, 0], # 类别0:黑色(背景)[255, 0, 0], # 类别1:红色(猫)[0, 255, 0], # 类别2:绿色(狗)# ...其他类别颜色
], dtype=np.uint8)
⑦ 关于视频流
[视频文件]|v
生产者进程 ──(in_q)──> 主进程 ──(out_q)──> 消费者进程| | || (帧: [1,3,1080,1920])| (结果: [1,1080,1920])|v v v预处理 [GPU批量推理] 保存为MP4| |v v
BGR→RGB 合并8帧→[8,3,768,768]| |v v
Tensor化 缩放→推理→还原分辨率
3 pth转onnx
3.1 为什么要转换
pth这种权重加载时候需要定义具体的网络模型,而
onnx则不需要。而且pth每一次推理耗时会更久,但onnx则每一次减少一半以上所以这里把
pth权重转换为onnx
(segment) D:\wpj\Bisnetv1>python tools/demo.py --config configs/bisenetv1_ipm0121.py --weight-path res/IPM0121/model_epoch_21.pth --img-path ./datasets/ipm_all_annoted_0121/images/training/0112.jpg
[张量] 耗时: 0.0000 秒
[图像读取与预处理] 耗时: 0.0036 秒
[图像转化为tensor] 耗时: 0.0180 秒
[推理:] 耗时: 0.7578 秒 # 耗时在0.75-0.8s
[预测:] 耗时: 0.0001 秒
3.2 转换代码
① 整个
onnx模型导出还是需要借助BiSenetV1网络模型,配置文件也是需要的② 设置基本的输入输出,以及算子版本
torch.set_grad_enabled(False)parse = argparse.ArgumentParser()
parse.add_argument('--config', dest='config', type=str,default='configs/bisenetv2.py',)
parse.add_argument('--weight-path', dest='weight_pth', type=str,default='model_final.pth')
parse.add_argument('--outpath', dest='out_pth', type=str,default='model.onnx')
parse.add_argument('--aux-mode', dest='aux_mode', type=str, # 注意,preddefault='pred')
args = parse.parse_args()
cfg = set_cfg_from_file(args.config) # 加载配置文件
if cfg.use_sync_bn: cfg.use_sync_bn = False net = model_factory[cfg.model_type](cfg.n_cats, aux_mode=args.aux_mode) # 定义Bisenet网络模型,用了aux_mode,会指定pred对应的argmax函数,所以说这里有可能报错,如果你的模型不指定这个,估计就不会调用这个;所以今天遇到的问题,最简单解决方式,应该是把aux_mode设置为eval模式,直接返回输出!!!!
net.load_state_dict(torch.load(args.weight_pth, map_location='cpu', weights_only=True), strict=False) # 加载权重
net.eval()dummy_input = torch.randn(1, 3, *cfg.cropsize) # dummy_input = torch.randn(1, 3, 1024, 1024)
input_names = ['input_image'] # 输入和输出,以及dynamic_axes设置形式一般这样
output_names = ['preds']
dynamic_axes = {'input_image': {0: 'batch'}, 'preds': {0: 'batch'}} # 指定模型的哪些输入/输出维度是动态的torch.onnx.export(net, dummy_input, # 输入args.out_pth, # 输出路径input_names=input_names, # 输入名output_names=output_names, # 输出名verbose=False, opset_version=16, # 算子集版本原来是18,不兼容这个pytorch版本,改成16---这里pytorch-1.13# operator_export_type=torch.onnx.OperatorExportTypes.ONNX,dynamic_axes=dynamic_axes)
③ 一直报错是关于
BiSeNetV1网络中forward函数中关于CustomArgMax的调用,这个CustomArgMax是一个自定义的argmax(在对一系列类别预测中,选择概率最大的哪一个),在train和pred模式下是没有调用,故此没有问题;但是在转换模型,即为pred模式下,发生了错误!因为它在symbolic返回中填的错误算子,系统找不到!
④ 定义
Bisenet网络模型,用了aux_mode,会指定pred对应的argmax函数,所以说这里有可能报错,如果你的模型不指定这个,估计就不会调用这个;所以今天遇到的问题,最简单解决方式,应该是把aux_mode设置为eval模式,直接返回输出!经过实验,确实如此!!因为他写的CustomArgMax存在问题,eval是后面修改过的函数!!
class BiSeNetV1(nn.Module):def __init__(self, n_classes, aux_mode='train', *args, **kwargs):super(BiSeNetV1, self).__init__()......def forward(self, x):H, W = x.size()[2:]feat_cp8, feat_cp16 = self.cp(x)feat_sp = self.sp(x)feat_fuse = self.ffm(feat_sp, feat_cp8)feat_out = self.conv_out(feat_fuse)if self.aux_mode == 'train':feat_out16 = self.conv_out16(feat_cp8)feat_out32 = self.conv_out32(feat_cp16)return feat_out, feat_out16, feat_out32elif self.aux_mode == 'eval':return feat_out,elif self.aux_mode == 'pred':# feat_out = feat_out.argmax(dim=1)feat_out = CustomArgMax.apply(feat_out, 1)return feat_outelse:raise NotImplementedErrorclass CustomArgMax(torch.autograd.Function):@staticmethoddef forward(ctx, feat_out, dim):if torch.onnx.is_in_onnx_export():# ONNX导出时:返回原始logits(保持梯度流)ctx.mark_dirty(feat_out) # 避免警告return feat_out# 训练/推理时:正常执行argmaxreturn feat_out.argmax(dim=dim).int() # 实际上,pred应该也可以使用argmax,在推理时候就不可以使用了!!@staticmethoddef symbolic(g, feat_out, dim: int):# 导出为Identity节点(避免引入ArgMax)return g.op("Identity", feat_out) # 原始代码return g.op('CustomArgMax', feat_out, dim_i=dim),这里执行不了
3.3 转换测试
python ./tools/xx.py --config configs/xx.py --weight-path ./res/x/x.pth
可视化模型,忘记放代码了,后面补一下
python ./tools/x.py # 可视化onnx权重,打印输入输出形状# Dtype: 1 Dtype 是 Data Type 的缩写,代表张量的数据类型。 eg, 1 torch.float32 2 torch.float64
===== Inputs =====
Name: input_image, Shape: ['batch', 3, 1024, 1024], Dtype: 1===== Outputs =====
Name: preds, Shape: ['batch', 2, 1024, 1024], Dtype: 1 # 2是类别数
推理测试 ,推理测试代码待补充
python ./tools/x.py --config configs/xxx.py --weight-path ./model.onnx --img-path ./datasets/xxx/x.jpg # 推理一张
python ./tools/xx.py # 推理一个文件内的所有IPM图像

4 onnx转MNN
4.1 编译MNN库
下载MNN库,为了转换
git clone https://github.com/alibaba/MNN.git
cd MNN
mkdir build && cd build
cmake .. -DMNN_BUILD_CONVERTER=ON -DMNN_OPENCL=ON -DMNN_VULKAN=ON # opencl是为了GPU推理
make -j$(nproc) # 工具位于 ./build/MNNConvert
sudo make install
./MNNConvert -f ONNX --modelFile xxx.onnx --MNNModel xxx.mnn ./MNNConvert --framework=ONNX --model=your_model.onnx --MNNModel=output.mnn --optimizeLevel=3 感觉没啥用 --bizCode=your_code 版权-f ONNX 指定输入模型格式为 ONNX
--modelFile 输入模型的路径(这里是 model.onnx)
--MNNModel 输出模型的路径(转换后的 MNN 模型保存为 model.mnn) --fp16 启用 FP16 量化(减小模型体积,提升推理速度,可能损失少量精度)
--weightQuantBits 8 INT8 权重量化(进一步压缩模型,需校准数据)
--optimizeLevel 2 优化级别(0不优化,1基础优化,2激进优化,可能改变计算图结构)
--inputConfigFile 指定动态输入的形状(通过 JSON 文件配置,解决 None 维度问题)
--forTraining 保留训练相关算子(默认转为推理模型)
--saveStaticModel 固定输入形状(移除动态维度,提升推理性能)
4.2 模型推理测试
关于c++调用MNN模型的代码还是有很多坑的(python代码比较简单),官方文档中例子也给的很奇怪,代码后续给出来
5 BisenetV2测试
BisenetV2优势在于用更加轻量模块来替换V1中原有Backbone即Resnet-18网络。论文中V2的速度应该是156 FPS / 65 FPS ≈ 2.4于V1。但实际测试完全达不到论文结果,原始论文代码未开源,论文中关于网络细节不像V1清楚,搜索发现网上复现达不到论文效果。
板卡测试—8核 –
ubunt20.04------mnn模型V2(13 MB)相较于 V1(50 MB)参数量下降,但计算貌似没有太大区别----因此不同模型的参数量不能直接作为推理速度标准,只可参考
单线程下V2(682 ms)快于V1网络(840 ms)158 ms
2线程下V2(435 ms)快于V1网络(481 ms)46 ms
4线程下V2(356 ms)快于V1网络(370 ms)14 ms
8线程下V2(363 ms)慢于V1网络(351 ms)11 ms
6 tee工具
在测试过程中发现,想要保存终端打印的信息,又不想自己写保存代码,还得编译cpp,找到tee这个工具,可以在linux终端命令行执行时,捕捉终端打印记录并保存,还是很好用的。
python test.py 2>&1 | tee output.txt




)







:函数进阶:函数嵌套与作用域(内部函数访问外部变量))



![[数据结构——lesson10.2堆排序以及TopK问题]](http://pic.xiahunao.cn/[数据结构——lesson10.2堆排序以及TopK问题])


