学习内容
需求
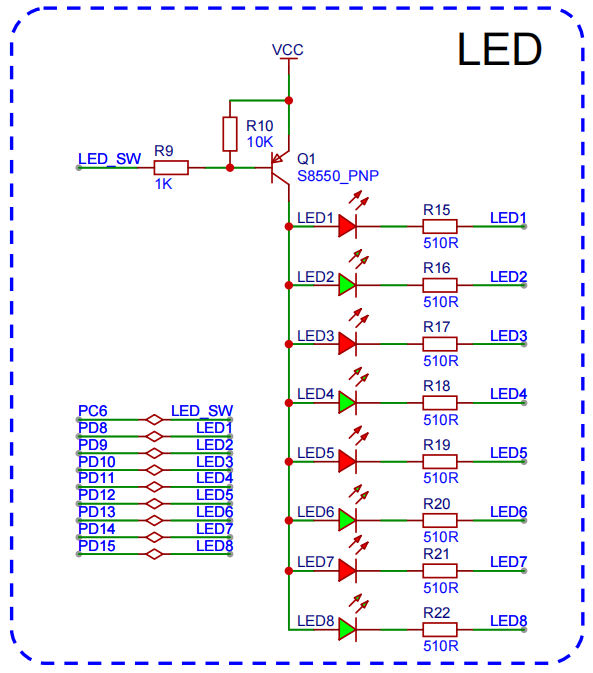
点亮4个灯,采用pwm的方式。
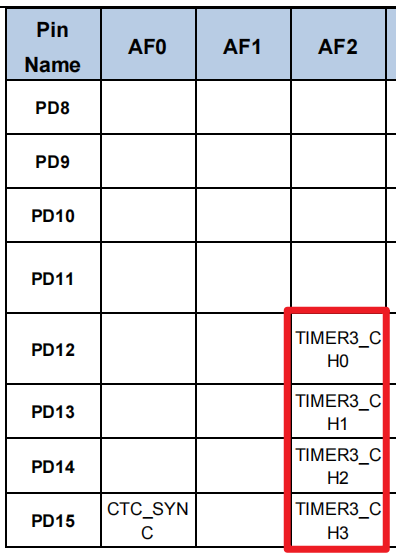
定时器 | 通道 | 引脚 | AF | LED序号 |
T3 | CH0 | PD12 | AF2 | LED5 |
CH1 | PD13 | AF2 | LED6 | |
CH2 | PD14 | AF2 | LED7 | |
CH3 | PD15 | AF2 | LED8 |
实现LED5, LED6, LED7, LED8呼吸灯效果
通用定时器多通道
点亮T3定时器下的多个通道的灯。
开发流程
- 添加Timer依赖
- 初始化PWM相关GPIO
- 初始化PWM,包含多通道配置
- PWM占空比控制
多通道配置
void timer_channel_config(uint32_t timer_periph, uint16_t channel) {/* TIMER 通道输出配置 */timer_oc_parameter_struct ocpara;/* initialize TIMER channel output parameter struct */timer_channel_output_struct_para_init(&ocpara);/* 启用P极输出 */ocpara.outputstate = (uint16_t)TIMER_CCX_ENABLE;/* 配置输出参数 configure TIMER channel output function */timer_channel_output_config(timer_periph, channel, &ocpara);/* 配置通道输出输出比较模式 configure TIMER channel output compare mode */timer_channel_output_mode_config(timer_periph, channel, TIMER_OC_MODE_PWM0);
}
输出比较模式
- TIMER_OC_MODE_PWM0: 高电平有效
- TIMER_OC_MODE_PWM1:低电平有效
占空比更新
/*********************************************************** @brief 更新pwm占空比* @param timer_periph 定时器* @param channel 通道* @param duty 占空比[0, 100]* @return **********************************************************/
void PWM_update(uint32_t timer_periph, uint16_t channel, float duty) { // 0-100if(duty > 100) duty = 100;else if(duty < 0) duty = 0;// pulse / PERIOD == duty / 100uint32_t pulse = PERIOD * duty / 100.0f - 1;// 计数值 65535timer_channel_output_pulse_value_config(timer_periph, channel, pulse);
}完整代码
#include "gd32f4xx.h"
#include "systick.h"
#include <stdio.h>
#include "main.h"
#include "USART0.h"void USART0_on_recv(uint8_t* data, uint32_t len) {printf("g_rx_buffer: %s g_rx_cnt:%d \n", data, len);
}static void GPIO_config() {rcu_periph_clock_enable(RCU_GPIOC);gpio_mode_set(GPIOC, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, GPIO_PIN_6);gpio_output_options_set(GPIOC, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_6);gpio_bit_reset(GPIOC, GPIO_PIN_6);
}void timer_gpio_config(uint32_t gpio_rcu, uint32_t gpio_port, uint32_t gpio_pin, uint32_t gpio_af) {rcu_periph_clock_enable(gpio_rcu);/* 设置gpio模式 */gpio_mode_set(gpio_port, GPIO_MODE_AF, GPIO_PUPD_NONE, gpio_pin);gpio_output_options_set(gpio_port, GPIO_OTYPE_PP, GPIO_OSPEED_MAX, gpio_pin);gpio_af_set(gpio_port, gpio_af, gpio_pin);
}void timer_init_config(rcu_periph_enum rcu_periph, uint32_t timer_periph,uint16_t t_prescaler, uint32_t t_period) {rcu_periph_clock_enable(rcu_periph);timer_deinit(timer_periph);/*初始化参数 */timer_parameter_struct initpara;/* initialize TIMER init parameter struct */timer_struct_para_init(&initpara);/* 根据需要配置值 分频系数 (可以实现更低的timer频率) */initpara.prescaler = t_prescaler - 1;/* 1个周期的计数(period Max: 65535) Freq > 3662 */initpara.period = t_period - 1;/* initialize TIMER counter */timer_init(timer_periph, &initpara);/* enable a TIMER */timer_enable(timer_periph);}void timer_channel_config(uint32_t timer_periph, uint16_t channel) {/* TIMER 通道输出配置 */timer_oc_parameter_struct ocpara;/* initialize TIMER channel output parameter struct */timer_channel_output_struct_para_init(&ocpara);ocpara.outputstate = (uint16_t)TIMER_CCX_ENABLE;/* 配置输出参数 configure TIMER channel output function */timer_channel_output_config(timer_periph, channel, &ocpara);/* 配置通道输出输出比较模式 configure TIMER channel output compare mode */timer_channel_output_mode_config(timer_periph, channel, TIMER_OC_MODE_PWM0);
}// TIMER CH
#define LED5 TIMER3, TIMER_CH_0
#define LED6 TIMER3, TIMER_CH_1
#define LED7 TIMER3, TIMER_CH_2
#define LED8 TIMER3, TIMER_CH_3// PWM
#define PRESCALER 1
#define FREQ 10000
#define PERIOD (SystemCoreClock / FREQ)// LED5 TM3CH0 PD12
// LED6 TM3CH1 PD13
// LED7 TM3CH2 PD14
// LED8 TM3CH3 PD15
static void Timer_config() {// 定时器// GPIO ----------------------------------------timer_gpio_config(RCU_GPIOD, GPIOD, GPIO_PIN_12, GPIO_AF_2);timer_gpio_config(RCU_GPIOD, GPIOD, GPIO_PIN_13, GPIO_AF_2);timer_gpio_config(RCU_GPIOD, GPIOD, GPIO_PIN_14, GPIO_AF_2);timer_gpio_config(RCU_GPIOD, GPIOD, GPIO_PIN_15, GPIO_AF_2);// TIMER----------------------------------------/* 升级频率*/rcu_timer_clock_prescaler_config(RCU_TIMER_PSC_MUL4);timer_init_config(RCU_TIMER3, TIMER3, PRESCALER, PERIOD); // 与通道无关// TIMER channel-------------------------------timer_channel_config(LED5);timer_channel_config(LED6);timer_channel_config(LED7);timer_channel_config(LED8);}/*********************************************************** @brief 更新pwm占空比* @param timer_periph 定时器* @param channel 通道* @param duty 占空比[0, 100]* @return **********************************************************/
void PWM_update(uint32_t timer_periph, uint16_t channel, float duty) { // 0-100if(duty > 100) duty = 100;else if(duty < 0) duty = 0;// pulse / PERIOD == duty / 100uint32_t pulse = PERIOD * duty / 100.0f - 1;// 计数值 65535timer_channel_output_pulse_value_config(timer_periph, channel, pulse);
}int main(void)
{systick_config();USART0_init();// 拉低总开关
// GPIO_config();Timer_config();printf("Init Complete!\n");float duty = 0;int8_t dir = 1;while(1) {PWM_update(LED5, duty);PWM_update(LED6, duty);PWM_update(LED7, duty);PWM_update(LED8, duty);if (duty >= 100) {dir = -1;} else if (duty <= 0) {dir = 1;}duty += dir;printf("duty: %.2f \n", duty);delay_1ms(10);}
}
高级定时器通道输出
高级定时器只有TIMER0和TIMER7支持。由于扩展板上的高级定时器没有对应的LED,我们可以使用跳线的方式,将TIMER0CH0对应的PE8引脚,短接到PD8(LED1)上,通过观察LED1的亮灭,了解是否正确输出。
开发流程
- 添加Timer依赖
- 初始化PWM,包含多通道配置
- Break配置
- PWM占空比控制
通道配置
void timer0_channel_config(uint32_t timer_periph, uint16_t channel) {/* TIMER 通道输出配置 */timer_oc_parameter_struct ocpara;/* initialize TIMER channel output parameter struct */timer_channel_output_struct_para_init(&ocpara);// 禁用 OP极
// ocpara.outputstate = TIMER_CCX_ENABLE;// 启用 ON极ocpara.outputnstate = TIMER_CCXN_ENABLE;/* 配置输出参数 configure TIMER channel output function */timer_channel_output_config(timer_periph, channel, &ocpara);/* 配置通道输出输出比较模式 configure TIMER channel output compare mode */timer_channel_output_mode_config(timer_periph, channel, TIMER_OC_MODE_PWM0);
}#define LED1 TIMER0, TIMER_CH_0timer0_channel_config(LED1);- 特别强调,这里的引脚分为P和N类型,不同引脚要配置不同的输出状态
Break配置
// break 只针对高级定时器TIMER0 & TIMER7,需要打开互补保护电路/* TIMER通道互补保护电路 */
timer_break_parameter_struct breakpara;
/* 初始化TIMER break参数结构体 */
timer_break_struct_para_init(&breakpara);
/* break输入的极性 HIGH */
breakpara.breakpolarity = TIMER_BREAK_POLARITY_HIGH;
/* 输出自动的启用 */
breakpara.outputautostate = TIMER_OUTAUTO_ENABLE;
/* bread输入的启用*/
breakpara.breakstate = TIMER_BREAK_ENABLE;
/* 配置TIMER7 break */
timer_break_config(TIMER0, &breakpara);
/* 启用TIMER7 break */
timer_break_enable(TIMER0);- breakstate:break状态开启
- ouputostate:输出状态,自动开启
- breakpolarity:输出极性,高电平
在ARM32中的高级定时器配置中,break参数用于增强安全性和控制功能,特别是在电机控制或功率转换应用中,避免因故障导致不必要的输出操作。
每个参数的作用和意义:
- runoffstate(溢出状态的运行)
参数示例:TIMER_ROS_STATE_DISABLE
作用:当定时器运行状态切换到溢出状态时,是否自动关闭输出信号。DISABLE表示不进行自动关闭。 - ideloffstate(空闲状态的关闭)
参数示例:TIMER_IOS_STATE_DISABLE
作用:当定时器进入空闲状态时,是否自动关闭输出信号。DISABLE表示不进行关闭。 - deadtime(死区时间)
参数示例:255
作用:定义死区时间(Dead Time),主要用于避免在切换高低驱动时,两个输出的驱动器同时导通,导致短路或过流。255表示配置了较大的死区时间。 - breakpolarity(断路信号极性)
参数示例:TIMER_BREAK_POLARITY_LOW
作用:定义break信号的极性。在此配置中,当断路信号为低电平时触发break事件,停止输出。 - outputautostate(自动输出状态)
参数示例:TIMER_OUTAUTO_ENABLE
作用:使能或禁用在break事件后自动恢复输出。当ENABLE时,break事件处理完成后,定时器输出可以自动恢复。 - protectmode(保护模式)
参数示例:TIMER_CCHP_PROT_0
作用:保护模式用于设置对输出寄存器的保护级别,防止在某些状态下被误修改。TIMER_CCHP_PROT_0表示最低保护级别,允许对输出进行修改。 - breakstate(断路状态)
参数示例:TIMER_BREAK_ENABLE
作用:开启或禁用break功能。ENABLE表示当检测到断路信号时,会停止输出以保护系统。
这些参数主要用于配置定时器的安全控制,break功能在高电压或高功率应用中非常关键。当发生异常或检测到故障(比如过流或短路)时,可以通过break功能立即停止PWM等输出信号,避免硬件损坏。
互补保护电路:用于驱动H桥或三相逆变器,当检测到故障(如短路)时,通过外部硬件信号(Break)快速关闭PWM输出,避免损坏MOSFET/IGBT。
高级定时器:支持死区时间、互补输出等复杂功能,常用于电机控制、电源转换等场景。
完整代码
#include "gd32f4xx.h"
#include "systick.h"
#include <stdio.h>
#include "main.h"
#include "USART0.h"void USART0_on_recv(uint8_t* data, uint32_t len) {printf("g_rx_buffer: %s g_rx_cnt:%d \n", data, len);
}static void GPIO_config() {rcu_periph_clock_enable(RCU_GPIOC);gpio_mode_set(GPIOC, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, GPIO_PIN_6);gpio_output_options_set(GPIOC, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_6);gpio_bit_reset(GPIOC, GPIO_PIN_6);
}void timer_gpio_config(uint32_t gpio_rcu, uint32_t gpio_port, uint32_t gpio_pin, uint32_t gpio_af) {rcu_periph_clock_enable(gpio_rcu);/* 设置gpio模式 */gpio_mode_set(gpio_port, GPIO_MODE_AF, GPIO_PUPD_NONE, gpio_pin);gpio_output_options_set(gpio_port, GPIO_OTYPE_PP, GPIO_OSPEED_MAX, gpio_pin);gpio_af_set(gpio_port, gpio_af, gpio_pin);
}void timer_init_config(rcu_periph_enum rcu_periph, uint32_t timer_periph,uint16_t t_prescaler, uint32_t t_period) {rcu_periph_clock_enable(rcu_periph);timer_deinit(timer_periph);/*初始化参数 */timer_parameter_struct initpara;/* initialize TIMER init parameter struct */timer_struct_para_init(&initpara);/* 根据需要配置值 分频系数 (可以实现更低的timer频率) */initpara.prescaler = t_prescaler - 1;/* 1个周期的计数(period Max: 65535) Freq > 3662 */initpara.period = t_period - 1;/* initialize TIMER counter */timer_init(timer_periph, &initpara);/* enable a TIMER */timer_enable(timer_periph);}void timer0_channel_config(uint32_t timer_periph, uint16_t channel) {/* TIMER 通道输出配置 */timer_oc_parameter_struct ocpara;/* initialize TIMER channel output parameter struct */timer_channel_output_struct_para_init(&ocpara);// 禁用 OP极
// ocpara.outputstate = TIMER_CCX_ENABLE;// 启用用 OP极ocpara.outputnstate = TIMER_CCXN_ENABLE;/* 配置输出参数 configure TIMER channel output function */timer_channel_output_config(timer_periph, channel, &ocpara);/* 配置通道输出输出比较模式 configure TIMER channel output compare mode */timer_channel_output_mode_config(timer_periph, channel, TIMER_OC_MODE_PWM0);
}// TIMER CH
#define LED1 TIMER0, TIMER_CH_0// PWM
#define PRESCALER 1
#define FREQ 10000
#define PERIOD (SystemCoreClock / FREQ)// LED1 TM0CH0_ON PE8
static void Timer_config() {// 定时器// GPIO ----------------------------------------timer_gpio_config(RCU_GPIOE, GPIOE, GPIO_PIN_8, GPIO_AF_1);// TIMER----------------------------------------/* 升级频率*/rcu_timer_clock_prescaler_config(RCU_TIMER_PSC_MUL4);timer_init_config(RCU_TIMER0, TIMER0, PRESCALER, PERIOD); // 与通道无关// TIMER channel-------------------------------timer0_channel_config(LED1);// Break --------------------------------------------------// break 只针对高级定时器TIMER0 & TIMER7,打开互补保护电路/* TIMER通道互补保护电路 */timer_break_parameter_struct breakpara;/* 初始化TIMER break参数结构体 */timer_break_struct_para_init(&breakpara);/* break输入的极性 HIGH */breakpara.breakpolarity = TIMER_BREAK_POLARITY_HIGH;/* 输出自动的启用 */breakpara.outputautostate = TIMER_OUTAUTO_ENABLE;/* bread输入的启用*/breakpara.breakstate = TIMER_BREAK_ENABLE;/* 配置TIMER7 break */timer_break_config(TIMER0, &breakpara);/* 启用TIMER7 break */timer_break_enable(TIMER0);
}/*********************************************************** @brief 更新pwm占空比* @param timer_periph 定时器* @param channel 通道* @param duty 占空比[0, 100]* @return**********************************************************/
void PWM_update(uint32_t timer_periph, uint16_t channel, float duty) { // 0-100if(duty > 100) duty = 100;else if(duty < 0) duty = 0;// pulse / PERIOD == duty / 100uint32_t pulse = PERIOD * duty / 100.0f - 1;// 计数值 65535timer_channel_output_pulse_value_config(timer_periph, channel, pulse);
}int main(void)
{systick_config();USART0_init();// 拉低总开关GPIO_config();Timer_config();printf("Init Complete!\n");float duty = 0;int8_t dir = 1;while(1) {PWM_update(LED1, duty);if (duty >= 100) {dir = -1;} else if (duty <= 0) {dir = 1;}duty += dir;printf("duty: %.2f \n", duty);delay_1ms(10);}
}
day15)






)




![[CH582M入门第十一步]DS18B20驱动](http://pic.xiahunao.cn/[CH582M入门第十一步]DS18B20驱动)






