本篇介绍在使用RA8-T系列芯片,建立马达类工程应用时,如何将电流环部分的指令和变量设置到TCM单元,以提高电流环执行速度,从而提高系统整体的运行性能,在伺服和高端工业领域有很高的实用价值。本文以RA8T1为范例,亦可推广到具备TCM功能的RA8-T系列其他芯片和相关领域。
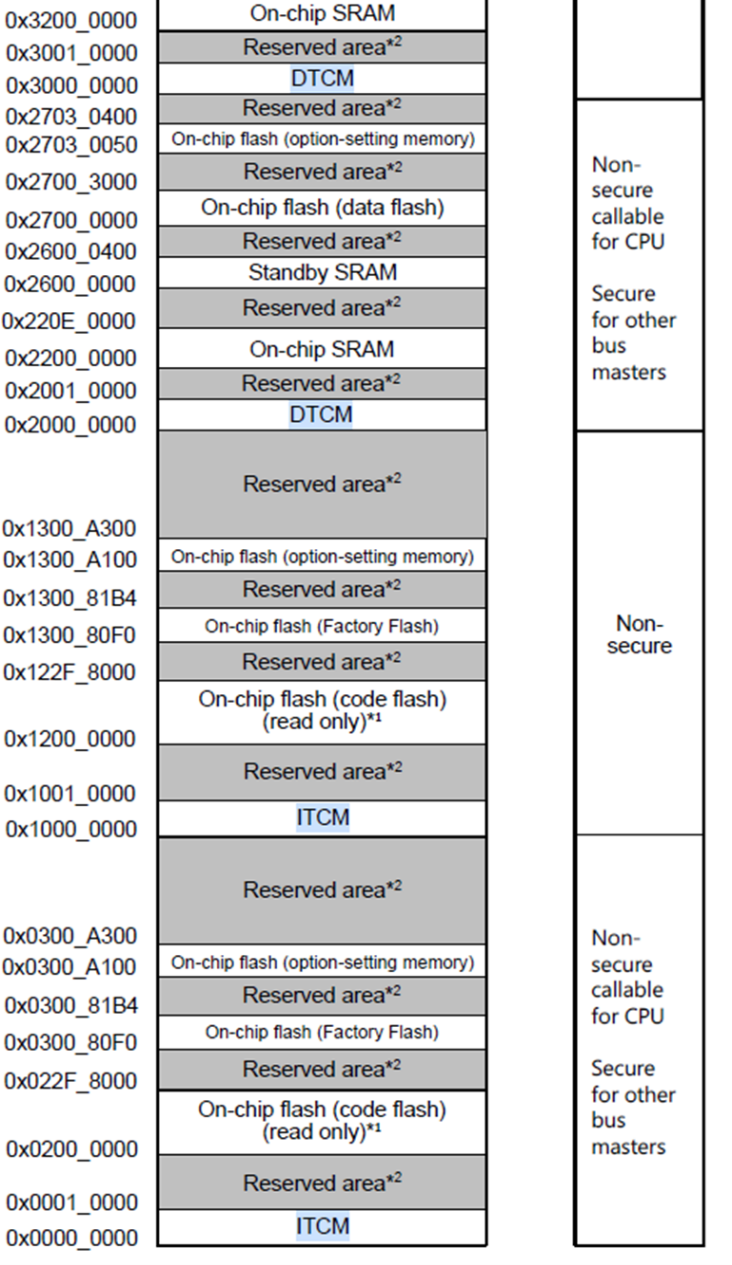
瑞萨新产品RA8-T系列芯片,采用Cortex-M85内核,并具有直接与处理器核心耦合的片上存储器TCM,通过专用接口访问,相比普通RAM或缓存,能提供更快的访问速度和较低的延迟和确定性访问。在RA8T1中,配置64KB(8KB×8 block)的ITCM和64KB(8KB×8 block)的DTCM。请参看数据手册,可以看到TCM在RA8T1的实际地址。
ITCM和DTCM分别用于存储指令和数据,以优化程序执行性能。在马达控制这种对实时性要求更高的应用中,可以将电流环等关键环节的指令和变量放到TCM中,提高执行速度,从而提高系统整体性能。
本文以瑞萨RA8T1官方样例工程RA8T1_MCILV1_SPM_LESS_FOC_E2S_V101为基础,对电流环进行TCM化设置,相关操作可推广到RA系列搭载TCM的其他芯片,和对应的示例软件工程。
RA8T2 sensorless方案的样例工程
当前工程测试环境及工具,获取链接如下所示:
IDE:版本:e2studio 2025-01
工具链:版本:13.2.1.arm-13-7。该版本可通过e2studio进行集成化安装。
FSP:版本:5.6.0
测试软件适配瑞萨官方开发套件MCK-RA8T1:该套件的相关资料可在瑞萨官网下载,链接:MCK-RA8T1 User's Manual。套件由CPU板、驱动板、通信板、样例电机及相关配件组成。

可按如下图示,参考用户手册搭建系统,调试马达工程。系统电源推荐DC24V,请另行准备。

将马达样例工程进行TCM优化的具体步骤
以RA8T1_MCILV1_SPM_LESS_FOC_E2S_V101工程为例,首先需统计电流环需要的的所有函数,并将它们分配到ITCM中。在本样例工程中,这些函数分为两类:一类是Open Source的,一类被封装到lib文件中的。
由于涉及到的函数数量较多,现仅举例说明设置方法:
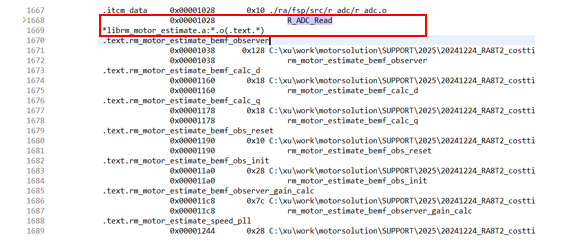
如函数R_ADC_Read,其作用是读出当前的相电流采样数据,是整个电流环计算的开端。函数体定义在/工程根目录/ra/fsp/src/r_adc/r_adc.c文件中。可在函数定义前增加修饰语句__attribute__((section(".itcm_data"))),将该函数指定分配到ITCM中。
示例:
__attribute__((section(".itcm_data")))
fsp_err_tR_ADC_Read(adc_ctrl_t * p_ctrl, adc_channel_tconst reg_id, uint16_t * const p_data)
ITCM起始地址为0x00000000,编译后,查看map文件,可以确认函数被分配到了ITCM区域中。
也可用系统推荐宏定义进行设置,宏定义在\工程根目录\ra\fsp\src\bsp\mcu\all\bsp_compiler_support.h文件中,具体定义如下所示:
#defineBSP_PLACE_IN_SECTION(x)_attribute__((section(x))) __attribute__((__used__))
本宏定义增加了对函数属性的进一步修饰,通常可用的修饰如下所示:
noinline/inline
used
long_call
对于函数的修饰,不是本文重点,请查阅其他材料进行确认。您可点击 【GUN】Function-Attributes_gun编译器高级属性-CSDN博客 获得相关信息。
通常情况下,算法是公司的核心资产。所以存在封库使用,或者利用第三方提供算法库的情况。在这样的情况下我们无法找到算法库中的函数本体进行设置。那我们就需要考虑将库文件整体放入ITCM中。
如RA8T1_MCILV1_SPM_LESS_FOC_E2S_V101样例工程,使用了三个库文件librm_motor_current.a,librm_motor_estimate.a,librm_motor_speed.a,分别用于处理电流环、位置估算、速度环的一些算法。
要实现本操作,需对ld文件进行修改。ld文件(链接描述文件)是控制链接器行为的关键脚本文件,主要用于管理目标文件的内存布局和符号解析。通过脚本指令精确控制输入文件(.o/.a)如何组合到输出文件(可执行文件/库)中,并定义程序在内存中的布局结构。
在本工程的ld文件中,首先定义了存储器的物理参数:包括各内存区域的起始地址、容量及访问属性(如可读/写/执行);接着加载了必要的库文件;通过SECTIONS指令规划段的分布策略,明确代码段、数据段、特殊功能段在存储空间的具体位置。同时脚本还设置了关键的系统级配置:指定程序执行的入口地址,各模块能按预定逻辑在存储器中精准排布。
关于ld文件的布局,不是本文重点,请搜索相关资源,进行理解。比如链接文章:LD文件详解-Asp1rant-博客园。
ld文件的设置需使用标准命令,本文不详细展开,请点击相关资源,进行理解。
下面我们详细介绍本次修改的操作
在工程目录script文件夹下,打开fsp.ld文件。
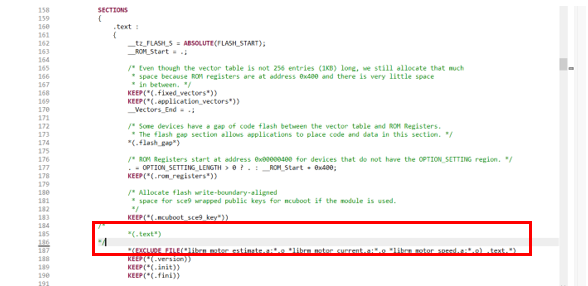
在SECTIONS命令后,链接代码段.text :内删除*(.text*)语句,更改为*(EXCLUDE_FILE(*librm_motor_estimate.a:*.o *librm_motor_current.a:*.o *librm_motor_speed.a:*.o) .text.*)。这样在链接时,将不对这三个.o的lib文件在此处进行链接。请看如下示例:
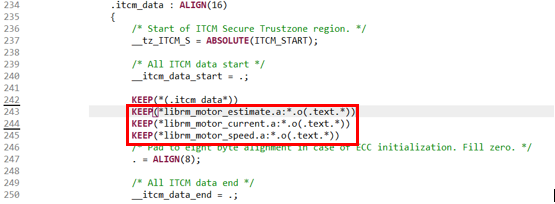
在SECTIONS命令后,在.itcm_data段内在KEEP(*(.itcm_data*))语句下面,增加下面三个语句:
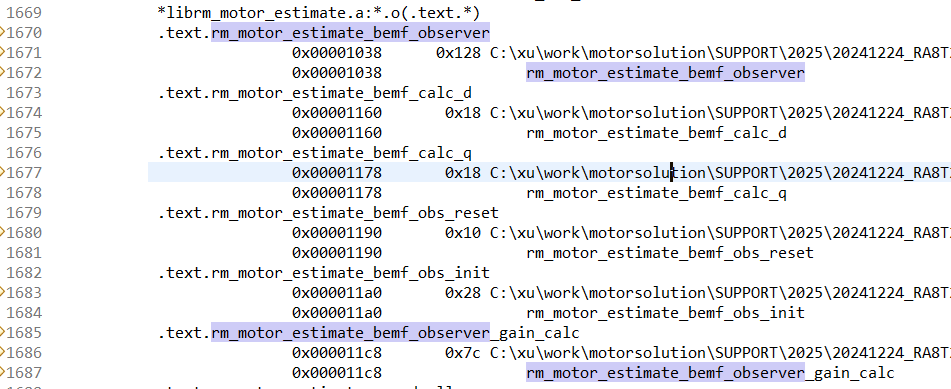
KEEP(*librm_motor_estimate.a:*.o(.text.*))
KEEP(*librm_motor_current.a:*.o(.text.*))
KEEP(*librm_motor_speed.a:*.o(.text.*))更改后,在链接过程中,将这三个指定.o文件连接到itcm段。请看如下示例:
设置完成后,重新编译工程。排查map文件,可以看到lib中的函数已经放置到ITCM中。如位置估算这几个函数,排查如下:
然后需统计电流环执行用到的所有变量,并将所有变量放置到DTCM中。由于数量较多,现举例说明设置方法。
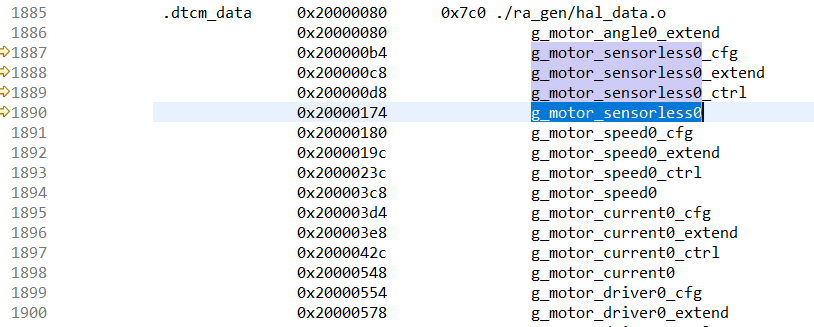
如结构体变量g_motor_sensorless0,此变量是电流环操作的主要变量结构体。变量定义在/工程目录/ra_gen/hal_data.c文件中,可在变量定义前增加修饰语句__attribute__((section(".dtcm_data")))将其分配到DTCM中。
请看如下示例:
__attribute__((section(".dtcm_data"))) motor_instance_t g_motor_sensorless0 =
{ .p_ctrl = &g_motor_sensorless0_ctrl, .p_cfg = &g_motor_sensorless0_cfg, .p_api = &g_motor_on_sensorless, };
在本应用中,g_motor_sensorless0内部嵌套了其他结构体变量,那么被嵌套的其他结构体也需要做类似声明,分配到DTCM中。
DTCM起始地址为0x20000000,编译后查看map文件,可以确认变量被分配到了DTCM区域中。
因为瑞萨官方样例工程,用FSP架构设置系统参数。所以在应用本例程测试时,需做两个手动设置:
1)将/工程目录 /ra_gen/,目录下的hal_data.c和hal_data.h文件设置为只读属性,这样在每次编译时,文件中所作的更改才不会被FSP默认设置覆盖。
2)在进行变量的DTCM设置时,如变量具有const标识符修饰,需将const标识符去掉。否则,类型修改产生冲突,新的设置不能成功。
因为实际应用过程中,系统建立的方法各不相同,遇到上面两种情况需注意,如自建工程,没有相关设计,则无需这两个手动步骤。
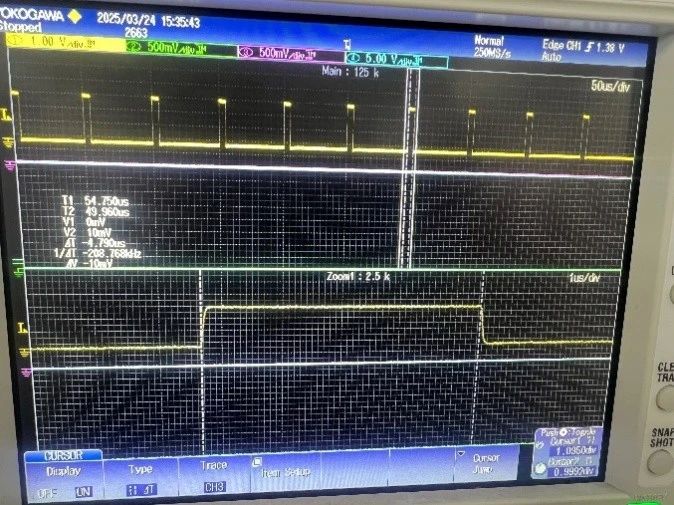
设置完成后,可以在电流环程序块的出入口,分别拉高和拉低I/O口,以测试电流环执行时间。
测试结果:为4.79us。
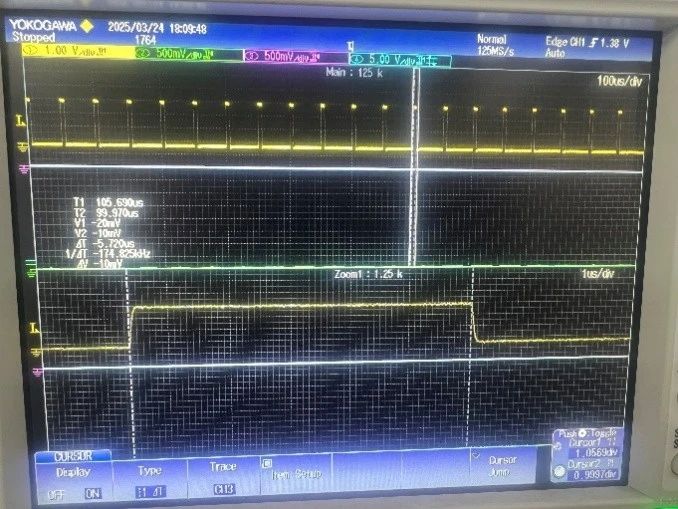
同等条件下,未TCM化的例程,电流环执行时间为5.72us。
可以看到TCM化有明显性能提升效果。
本文介绍了,在使用瑞萨RA8-T系列芯片设计马达工程时,如何将指令和变量放置到TCM单元,从而加速特定执行的运行速度。可以最大限度地发挥瑞萨芯片优势,为客户提供更好的解决方案。
文章来源:RA生态工作室https://www.ramcu.cn/



)




![ParaGraphX [特殊字符]](http://pic.xiahunao.cn/ParaGraphX [特殊字符])
)

)





:动态准入控制和Webhook)

