1. usd导出urdf失败
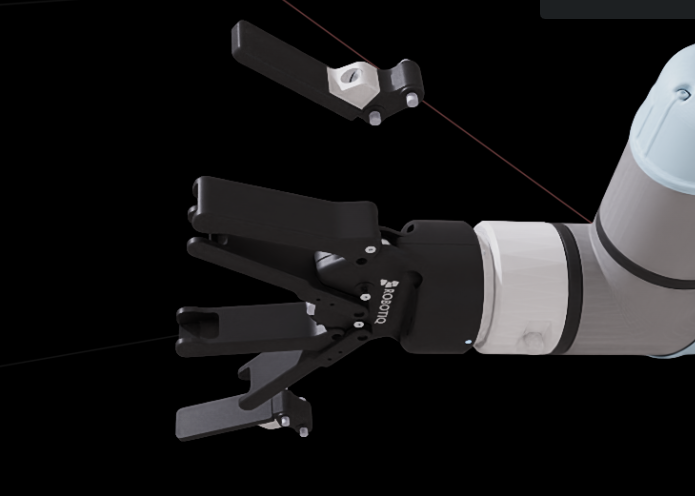
在isasssim的仿真中的 robotiq 2f夹爪,首先目前4.5asset里面的usd不能直接转urdf,因为模型中存在 “闭环连接”,即某个部件(或关节)同时与两个及以上的父部件相连,形成类似 “三角形” 的循环结构
即usd导出urdf失败
2. 夹爪不动,夹爪散架
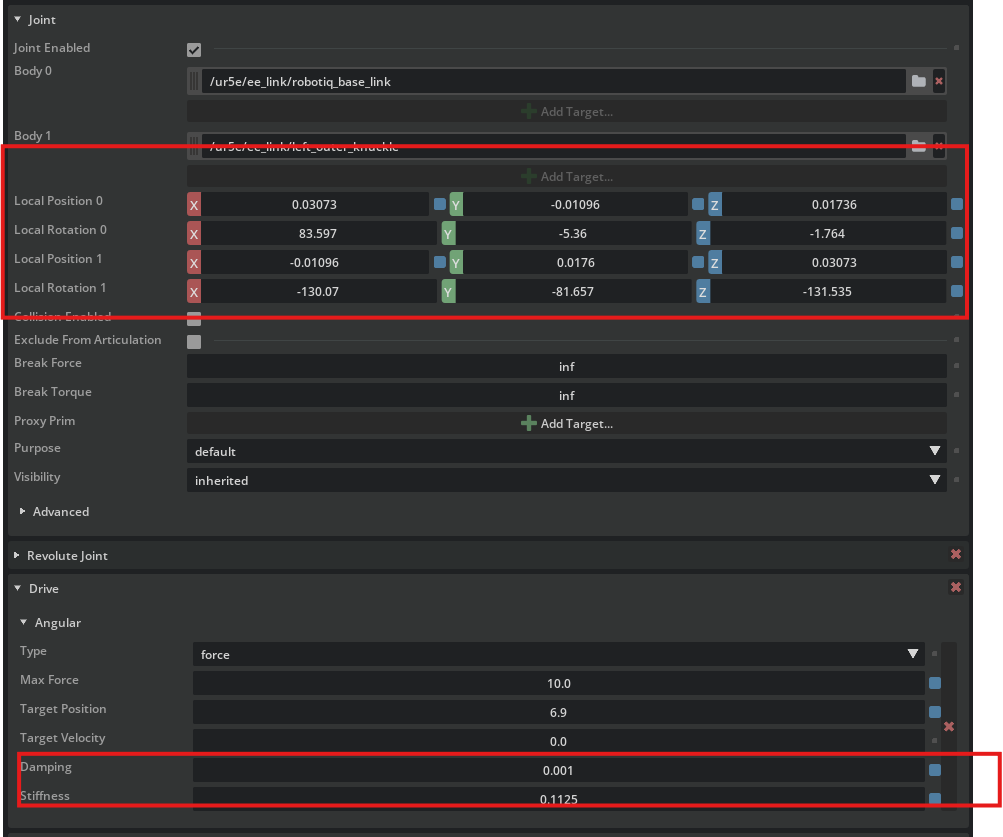
修改了drive的pd参数,导致夹爪不动
修改了夹爪内部的位置关系,导致散架(很可能,无法修复了,只能用原版覆盖了
在isasssim的仿真中的 robotiq 2f夹爪,首先目前4.5asset里面的usd不能直接转urdf,因为模型中存在 “闭环连接”,即某个部件(或关节)同时与两个及以上的父部件相连,形成类似 “三角形” 的循环结构
即usd导出urdf失败
修改了drive的pd参数,导致夹爪不动
修改了夹爪内部的位置关系,导致散架(很可能,无法修复了,只能用原版覆盖了
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若转载,请注明出处:http://www.pswp.cn/web/91348.shtml 繁体地址,请注明出处:http://hk.pswp.cn/web/91348.shtml
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除! ✨ | Pokedex(宝可梦图鉴))


















