随着生态学、林学、地理信息科学等多个学科对“结构—功能”一体化研究的共同推进,无人机多光谱与结构光摄影测量(SfM)技术已经从早期实验室验证阶段,走向区域尺度精细生态监测与资源清查的主流工具。过去十年,厘米级空间分辨率、十余个窄波段的多光谱传感器与轻量级激光雷达共同下沉至科研团队与工程单位,使得冠层三维形态、叶面积指数、生物物理变量乃至碳储密度的大规模、可重复估算成为可能。然而,这一技术红利并未自动转化为高质量研究成果:一方面,不同传感器、航线设计、辐射定标、地面控制点布设等细节缺乏统一规范,导致同区域数据差异显著;另一方面,从原始影像到可发表的生态变量,需要跨越多源数据预处理、稠密点云质量控制、植被指数与地形因子耦合、机器学习模型选择与解释等复杂链条,任何环节的技术断层都会削弱成果的可信度与可重复性。因此,我们决定举办此次为期四天的“无人机多光谱-生态三维建模与案例实战”,搭建一个面向科研院所、大学学者及工程技术人员的共享平台,集中讨论并解决“如何获取高质量三维多光谱数据集、如何建立可解释的生态模型、如何快速产出可复现的研究成果”这三大核心问题,以推动无人机生态遥感技术从“能用”走向“好用、敢用、持续用”。
以“技术细节透明化、代码脚本可复现、成果模板可移植”为设计主线:系统梳理多光谱传感器波段设置、辐射定标与航线规划准则,结合Metashape SfM全流程演示Tie Points筛选、重投影误差控制及点云空洞修复策略;利用Python开源栈(rasterio、GDAL、geopandas、scikit-image)完成批量投影转换、影像裁剪、掩膜过滤与NDVI、MSAVI、GNDVI等植被指数计算;通过随机森林、XGBoost、SVM三套并行建模管线,对碳储量、下层植被生物量、土地利用/覆盖分类三个真实案例进行交叉验证、网格搜索与超参数优化,并引入SHAP值与偏依赖图提升模型可解释性;
专题一、生态三维建模导论与无人机多光谱基础
1、生态系统结构建模与功能建模的区别
2、无人机多光谱传感器原理与常见波段
3、多光谱遥感与三维建模融合的研究范式
专题二、三维模型生成与多光谱遥感预处理
1、多光谱遥感数据采集(无人机航拍、地理空间数据云等)
2、Metashape建模流程实操
3、SfM重建原理与稠密点云生成、植被指数计算
4、Python环境配置与常用编辑器
5、遥感与生态建模工具库(rasterio、gdal)简介
6、Python栅格/矢量预处理:投影、裁剪、掩膜、格式转换
专题三、三维数据质量评价与生态建模适配性分析
1、三维建模精度控制:Tie Points、RMSE、重投影误差
2、点云质量指标:点密度、空洞率、结构完整性
3、三维数据对生态建模的适配性分级(生物量vs地表粗糙度等)
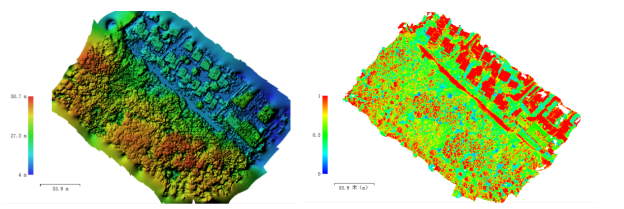
4、基于Python的统计分析:点云密度热力图、空洞识别、误差地图
5、不可用区域识别与过滤策略(遮阴/水面/边缘拉伸)
专题四、生态三维与多光谱特征提取
1、地形与结构因子:坡度、坡向、高程、冠层粗糙度
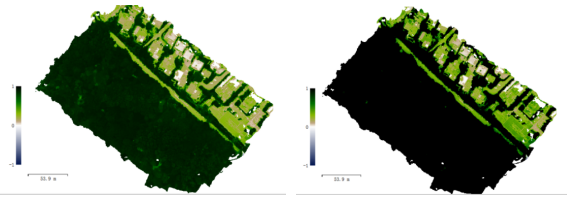
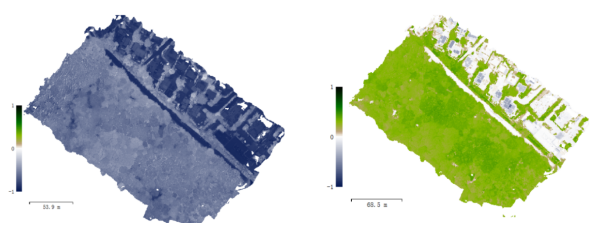
2、植被指数:NDVI、MSAVI、GNDVI等
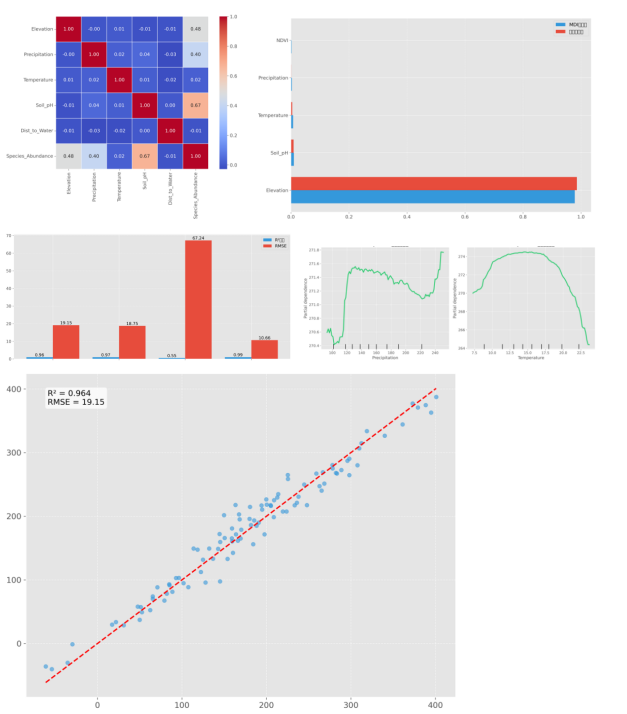
3、特征变量筛选:相关性分析、PCA降维
4、Python提取工具链:rasterio, geopandas, scikit-image
专题五、Python建模工具链与生态建模流程
1、模型类型:回归 vs 分类、监督 vs 非监督
2、数据预处理:标准化、插值、训练集划分
3、模型构建:随机森林、XGBoost、SVM、线性回归
4、模型调参与评估:交叉验证、网格搜索、超参数优化
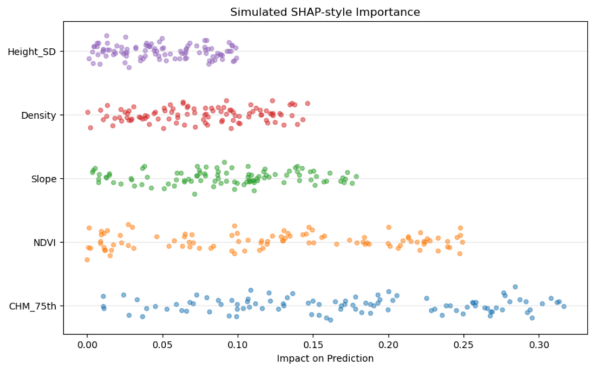
5、模型可解释性:SHAP值、重要性分析图、Partial Dependence Plot
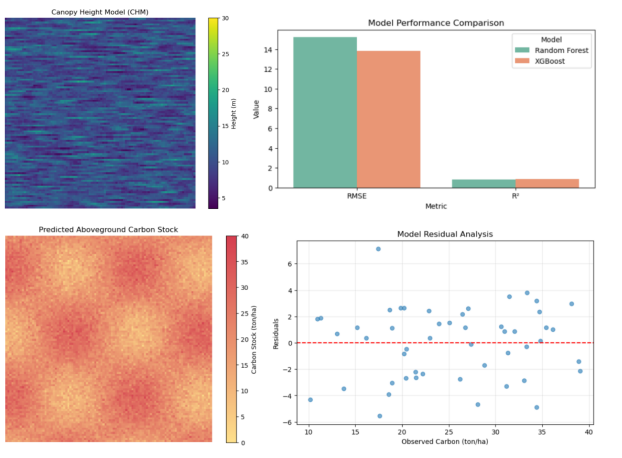
专题六、案例分析 I:碳储空间建模(UAV+点云)
1、目标定义:基于CHM、NDVI、坡度等预测地上碳储量
2、样本构建:样地实测碳储 + UAV影像提取特征
3、模型对比:随机森林 vs XGBoost(RMSE / R²)
4、结果展示:预测图、残差图、SHAP特征重要性
5、Python批处理脚本+模型复现实验
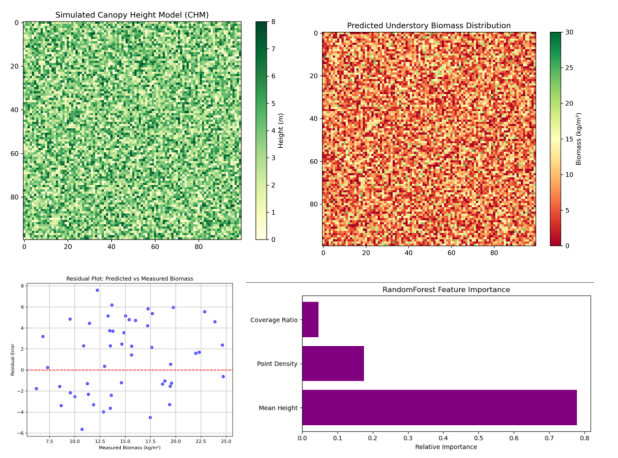
专题七、案例分析II:下层植被生物量估算(低致密环境)
1、目标:利用点云高度/密度特征预测地被生物量
2、点云处理:Metashape→CHM→格网划分
3、特征提取:平均冠层高度、点密度、植被覆盖率
4、建模分析:回归模型/多项式拟合 + 精度评估
5、成果图:生物量热力图、预测 vs 实测残差图LSTM、GRU、Prophet、XGBoost等时序建模
6、Python批处理脚本+模型复现
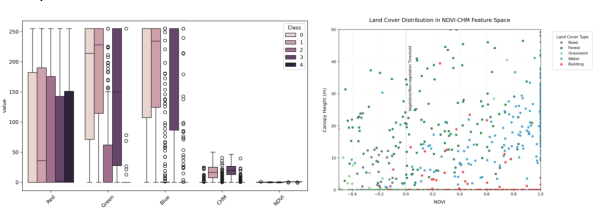
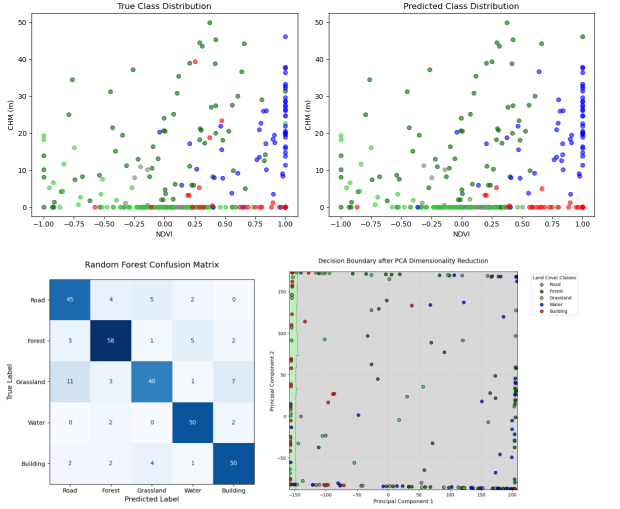
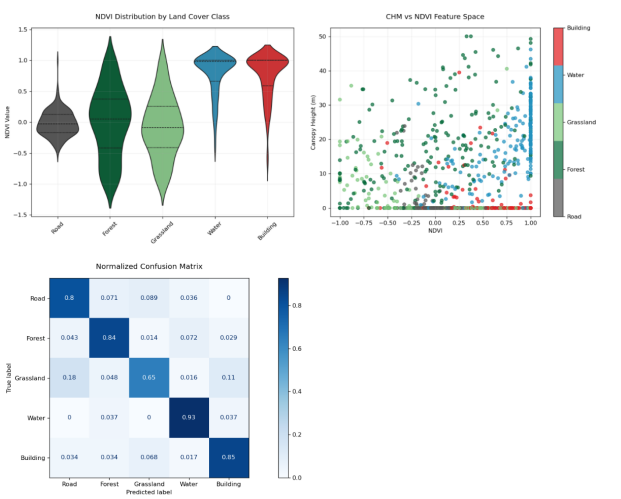
专题八、案例分析III:多源融合下的土地利用/覆盖分类建模(LULC)
1、数据融合:正射影像 + CHM + NDVI
2、样本标注:人工矢量标签(道路、林地、草地等)
3、多分类建模:SVM vs XGBoost(精度评估)
4、输出成果:LULC地图、混淆矩阵、Kappa系数
5、SHAP特征贡献图:空间特征对分类影响排序
6、Python批处理脚本+模型复现





)





)



)



