USB2.0在电源供应后,通过Pull Up D-来决定枚举LS,Pull Up D+有一个USB高速握手过程,来决定HS FS。USB3.0则会通过链路训练(Link Training),来准备USB3.0通信。
每当我们插上USB线的时候,对于3.0的5G频率来说,USB线全程的状态需要参数调整,在long channel和short channel的问题上可能也有不同,链路五花八门,我们需要磨练出来适合自己链路的参数

今天介绍一下USB3.0基于Upstream Facing Port(USB设备)Downstream Facing Port(USB主机)使用LTSSM(Link Training and Status State Machine) 进行链路训练过程。
USB 3.0 协议栈
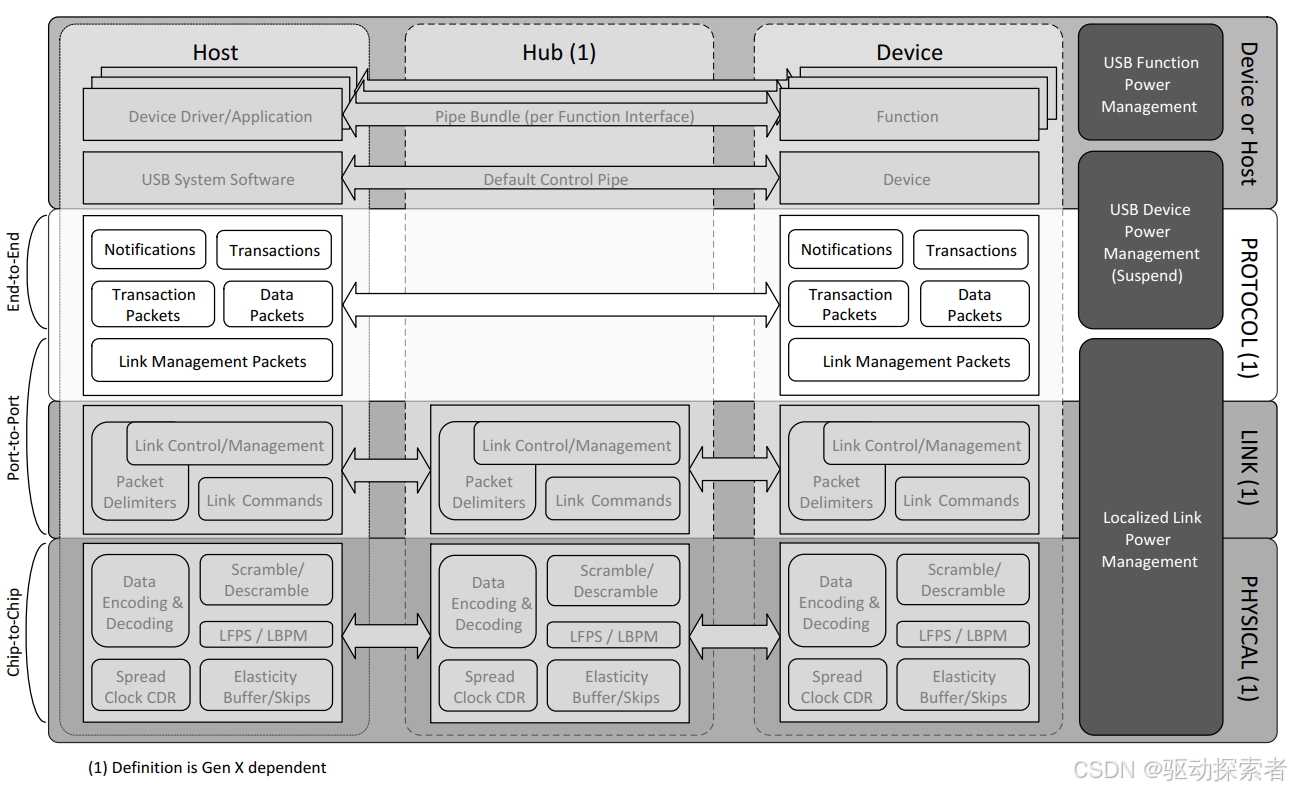
我们可以看到USB实际主要是3层通信模型,协议层,链路层,物理层。链路训练主要是使用链路层定义的相关包进行协议通信的过程。
LTSSM
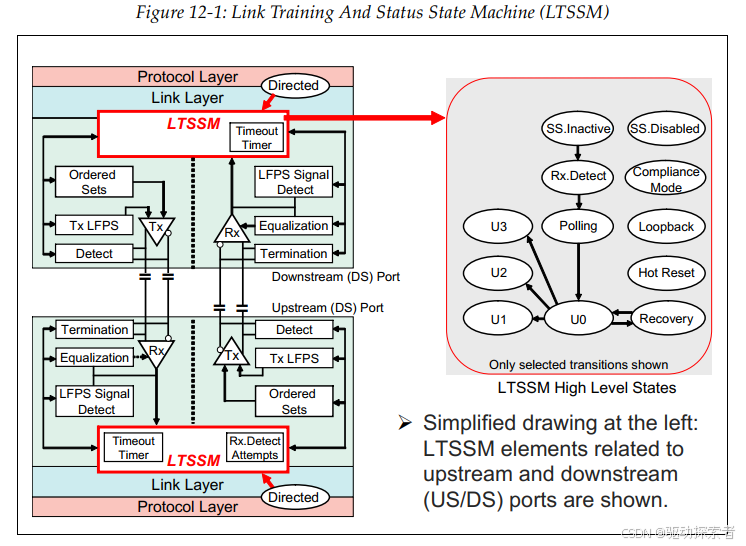
基于链路层,物理层提供了很多处理单元来轮转链路训练状态
同时我们可以看到LTSSM的12种状态。LTSSM有12个高级状态,用于链路训练,再训练,链路级错误处理,链路电源管理,链路测试管理。
操作状态:U0,U1,U2,U3。
链路初始化和训练状态:Rx.Detect、Polling、Hot Reset、Recoverry。
其它状态:SS.Inactive、SS.Disabled。
我们重点关注Rx.Detect和Polling状态机,Link Training主要使用这两个状态。
USB 3.0的LTSSM用于在USB 3.0设备间建立通信链接前进行链路训练。链路训练的目标是确保一个可靠的5 Gb/s信号。链路训练将适应实际链路信号条件的主要负担放在了每个链路伙伴的接收物理层(PHY)逻辑上
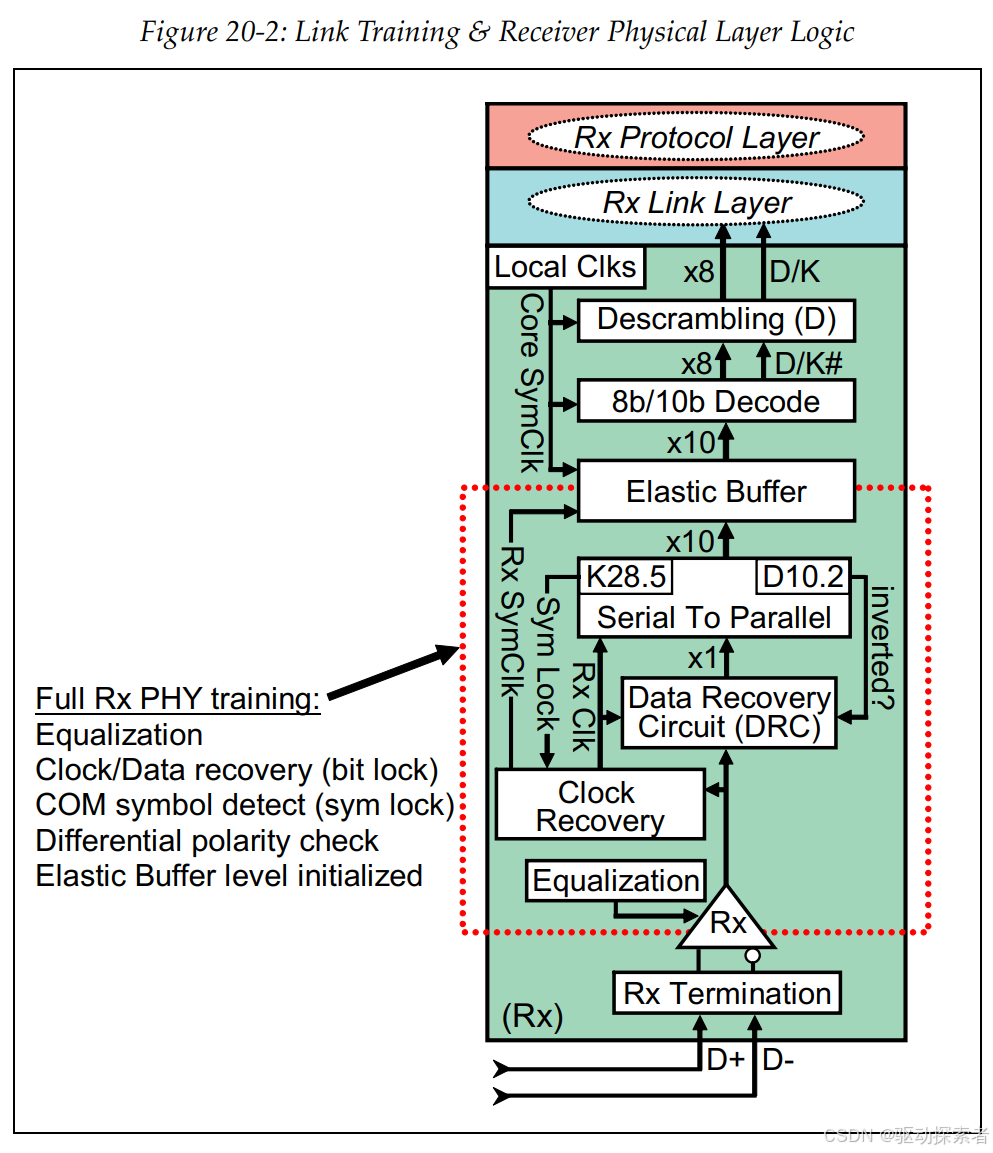
链路训练的主要任务包括:
接收均衡(Receiver Equalization)由于USB 3.0的高速率,传输路径上的高频损耗较大,因此接收端需要进行均衡以补偿高频损耗,保证信号完整性。训练过程中,发送端会发送特定的比特流模式(pattern),接收端根据这些模式调整均衡参数。接收机均衡逻辑的设置在链路训练期间分两步完成。
第一步:发射机首先发送 10-50 MHz 的 Polling.LFPS 脉冲串,提醒链路伙伴的 LTSSM 开始训练,并允许接收机设置低频参数(也被宽泛地称为直流参数)。由于频率较低,无论信道长度如何,接收机都应能恢复有效的 LFPS 方波信号。
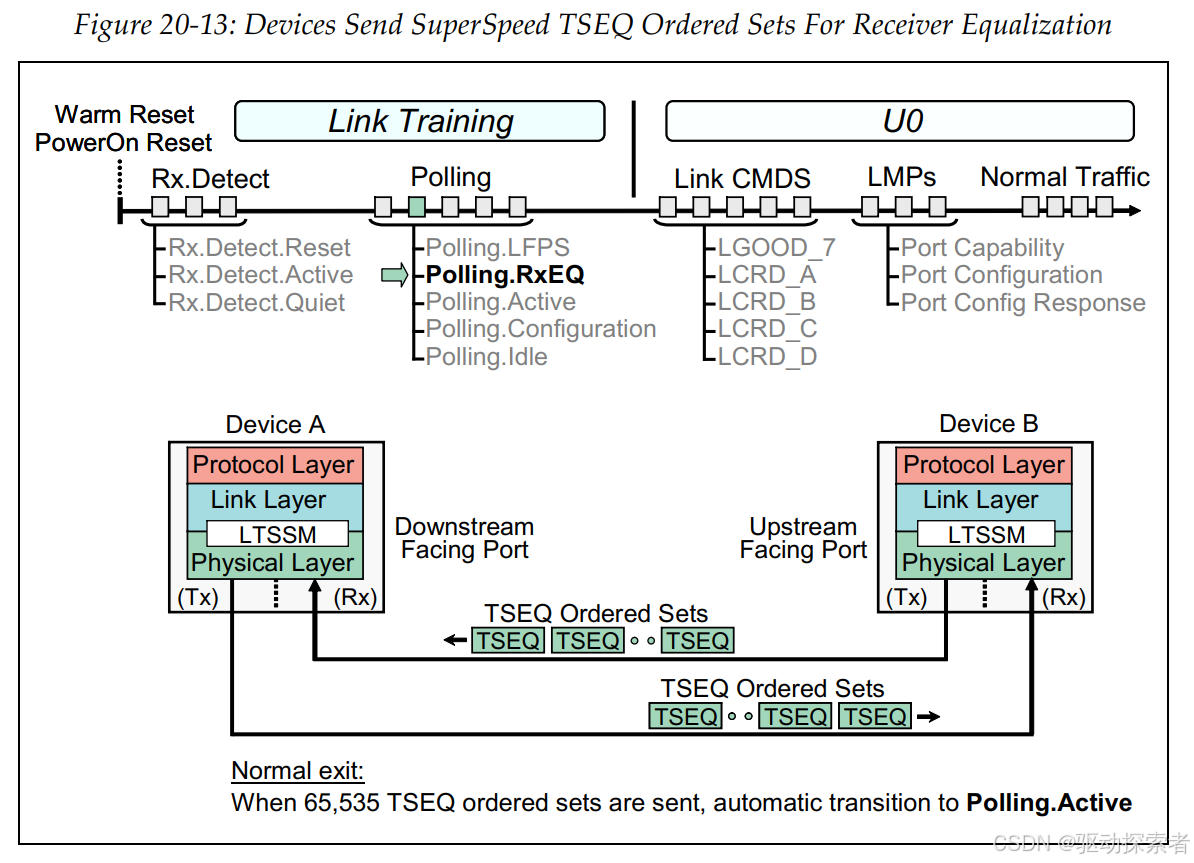
第二步:接下来,发射机发送 5 Gb/s 超高速训练序列(TSEQ)有序集,让接收机建立高频均衡器参数。为了提供多种硬件均衡解决方案,发射机需要重复 32 个符号的 TSEQ 有序集 65,536 次耗费大约 4毫秒的链路训练时间,约 4mS 的链路训练时间。
时钟恢复(Clock Recovery)USB 3.0的时钟是内嵌在数据流中的,为了保证接收端可以从数据流中恢复时钟,采用了8b/10b编码。在发送训练序列(TSEQ)时,接收端会从数据流中恢复时钟。时钟恢复使用均衡期间接收到的 TSEQ 有序集。之后,在退出 U1、U2 和 U3 电源管理等状态时,使用 TS1/TS2 有序集进行时钟恢复。
数据恢复(Data Recovery)使用恢复的时钟对数据进行采样,将每个比特的数据恢复出来,并送入串并转换模块。(Serial ToParallel)
串并转换和字符锁定(Serial to Parallel Conversion and Symbol Lock)数据恢复后,需要将比特流转换为10比特一组的数据符号,并找到起始点以正确解读数据。
极性翻转(Differential Polarity Inversion)高速链路使用差分信号,极性翻转是为了确保信号的正确传输。
弹性缓冲区初始化(Elastic Buffer Initialization)弹性缓冲区作为链路时钟和本地时钟的中间过渡区域,初始化过程主要是将数据符号搬运到缓冲区中,并确保缓冲区不会出现溢出或欠载。
LTSSM的握手信号
LTSSM使用下面3种信号来握手。
LPFS
有6个LFPS信号,其中5个用于LTSSM状态转换(差异是Burst不一样),如上图12-2所示。
Ordered Sets
在链路训练过程中,TSEQ、TS1和TS2有序集以两种方式使用,如上图12-3。首先,它们使接收机物理层能够接收连接到链路合作伙伴的超高速发射机的电气接口。这包括接收机均衡化、时钟和串行数据恢复、弹性缓冲区管理等。其次,随着链路训练的进行,这些有序集的交换被用来推进LTSSM状态,直到进入U0链路状态。
Link Conmmands
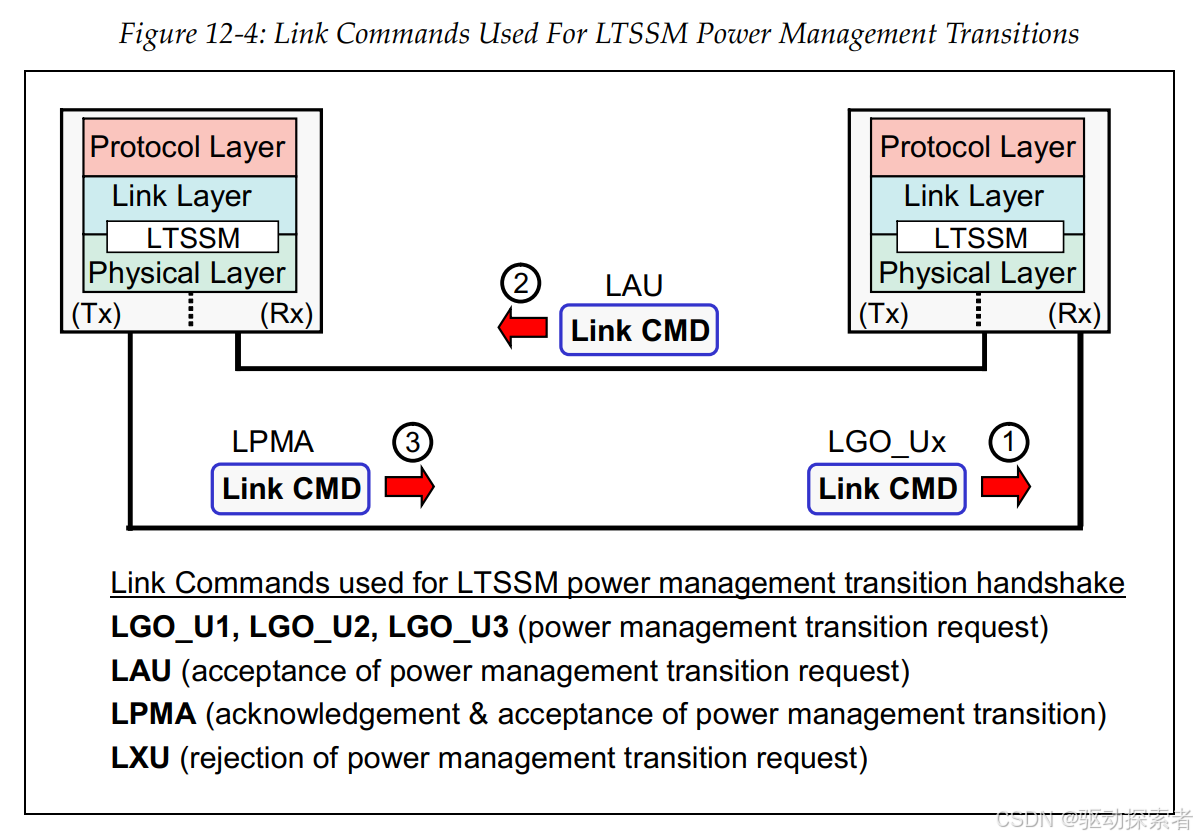
USB 3.0定义了一组电源管理链路命令如上图12-4,在请求链路伙伴从U0到U1、U2、U3或U3时使用。使用链路命令代替TS1/TS2有序集有两个优点,都与速度有关。首先,链接命令的长度为8字节(TS1/TS2s的长度为16字节)。其次,使用链接命令节省了额外的时间,因为它避免了通过恢复转换(在使用TS2有序集时根据需要)。
注:LGO_Ux链路命令用于从U0过渡到电源管理状态U1-U3,从链路状态U1-U3退出需要一个LFPS握手以退出电气空闲,并通过恢复进行过渡以返回到U0。
Link Training轮转LTSSM
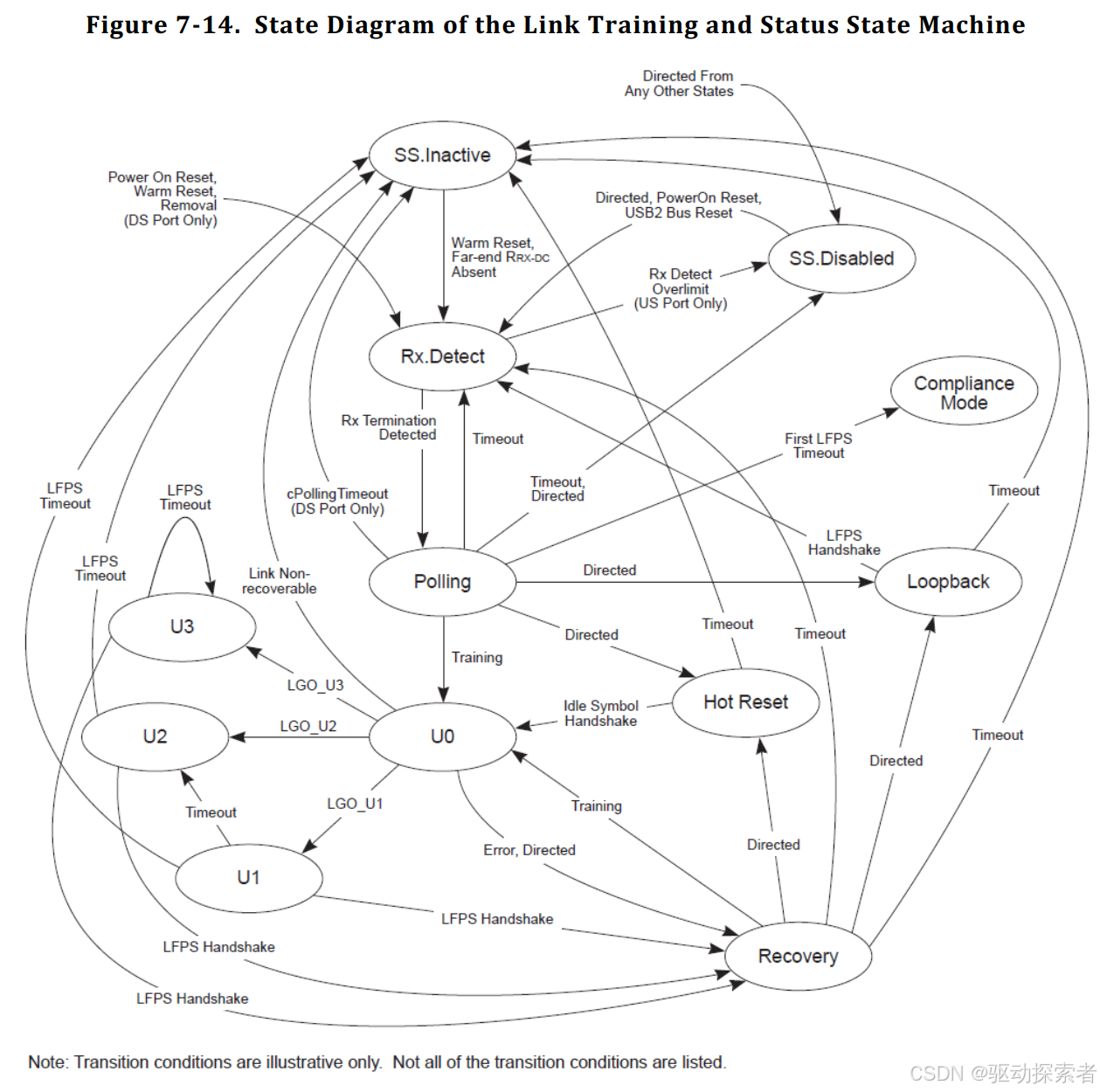
下面将从链路从初始状态过渡到允许 5 Gb/s 超高速数据包传输的 U0 运行状态所需的事件序列来描述链路训练。如上图7-13描述了12个状态机轮转条件。整个链路训练过程由LTSSM管理,涉及到多个状态和子状态,主要是从RX.Detect到Polling.Idle等,最终进入USB 3.0的正常工作状态U0,这个过程确保了USB 3.0设备间的可靠通信和高效数据传输。
链路初始化和训练状态Rx.Detect、Polling、HotReset、Recoverry
Rx.Detect
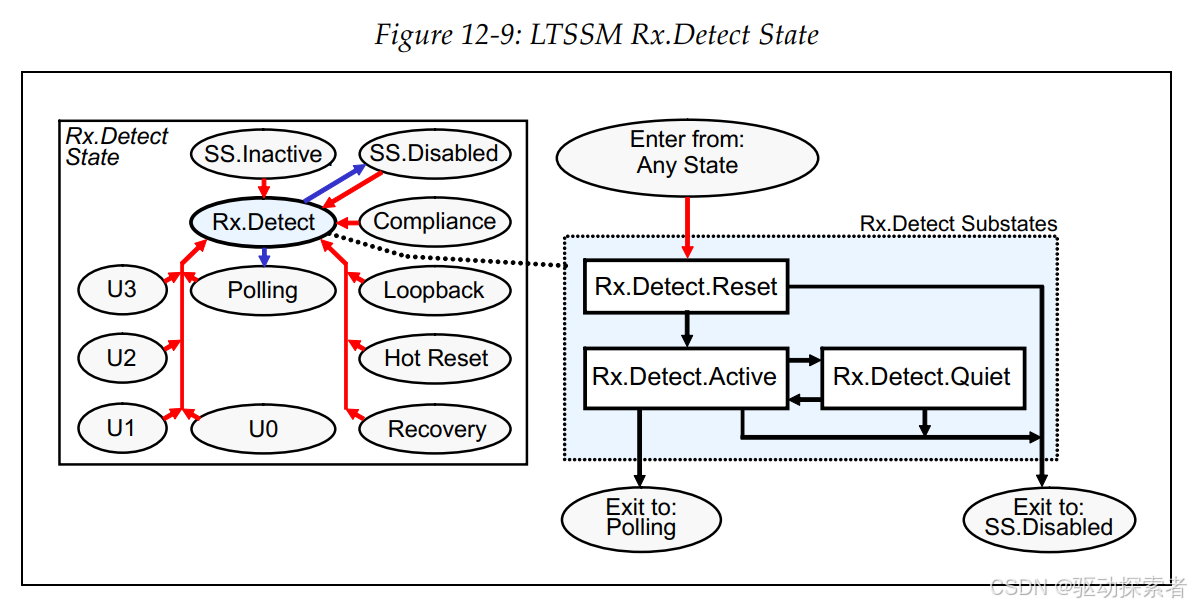
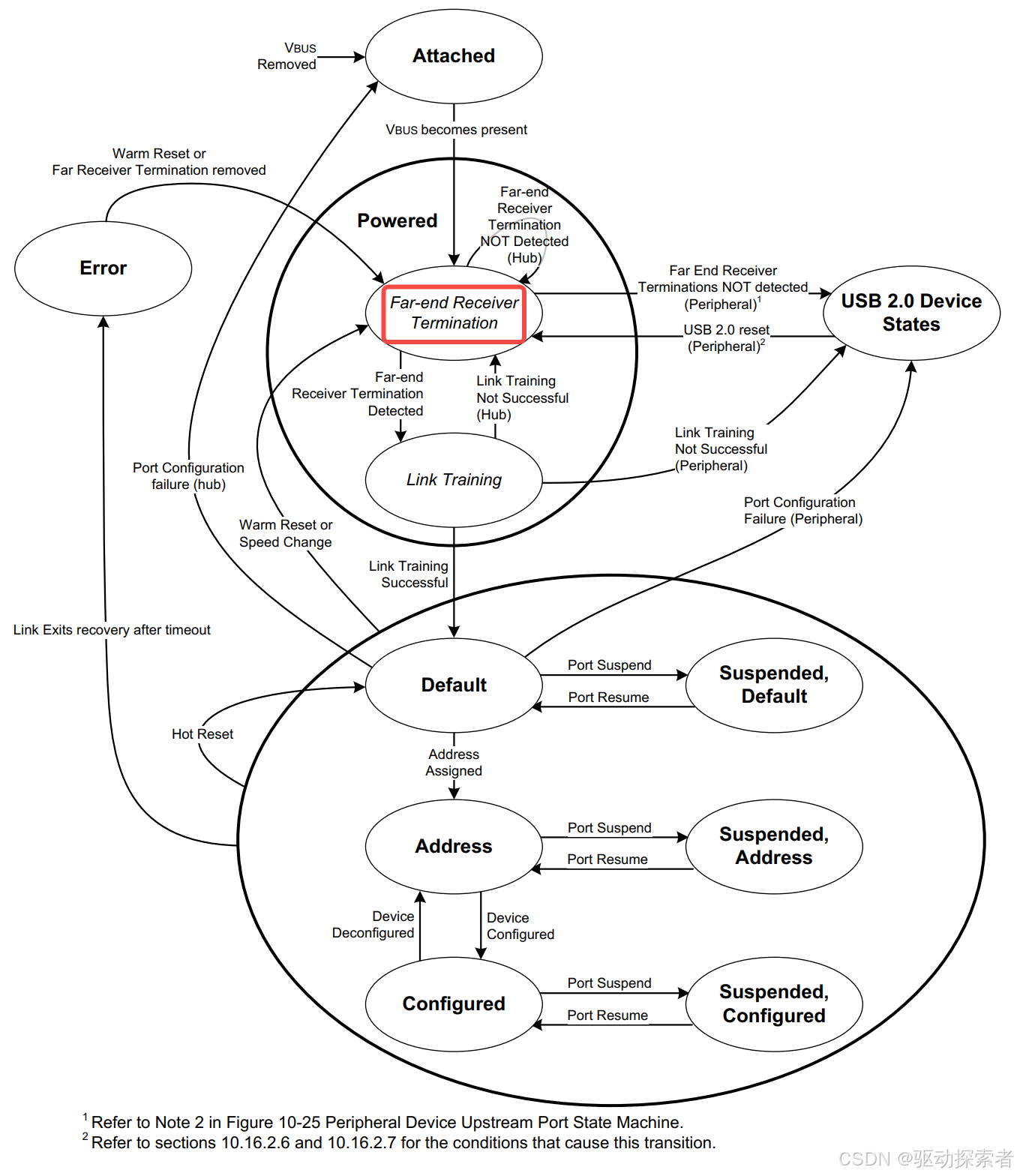
如上图12-9,链路训练的初始状态,设备在电源上电复位后开始处于Rx.Detect状态。也可以从其他LTSSM状态通过特定的超时或热复位转移到Rx.Detect状态。在LTSSM的Rx.Detect状态下,每个SS(SuperSpeed)设备会定期尝试检测链路伙伴,方法通过检查远端接收器的低阻抗端接来判断有SS设备接入。
Rx.Detect.Reset
Rx.Detect.Reset子状态中的要求
在Rx.Detect.Reset子状态中,设备正在等待电源开启重置初始化完成,然后才能进行链路训练。以下要求适用于LTSSM处于Rx.Detect.Reset状态时。请注意,对于面向下游(DS)的端口和面向上游(US)的端口,要求略有不同。
• 如果进入此子状态是由于电源开启重置,那么上游和下游端口将完成所需的内部初始化。
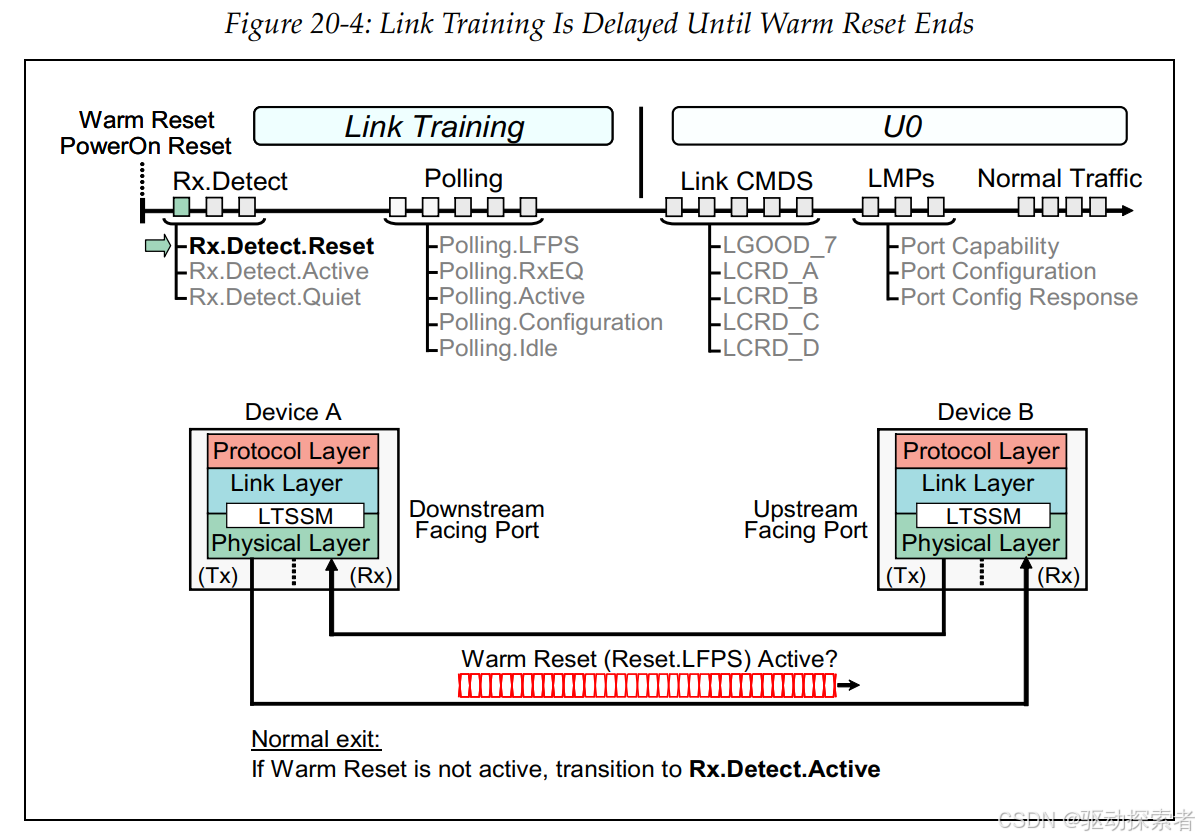
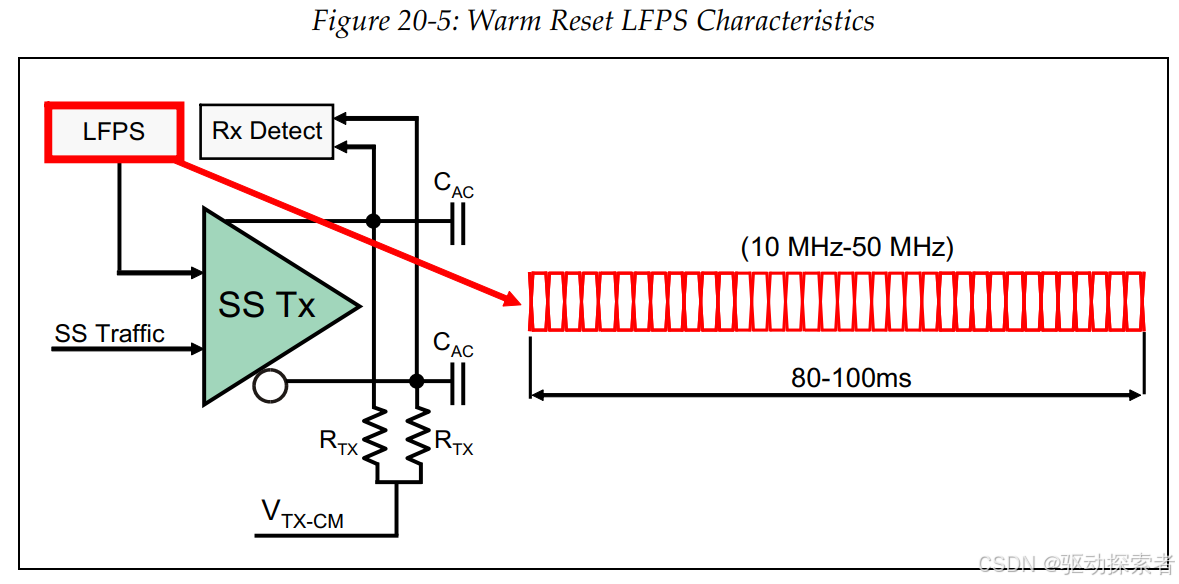
• 如果进入此子状态是由于温重启,则面向下游的端口将继续驱动温重启LFPS信号80-100毫秒(tReset)。
• 如果进入此子状态是由于温重启,则面向上游的端口将保持在此子状态,直到温重启信号结束。
退出Rx.Detect.Reset子状态的规定
• 如果进入此子状态是由于电源开启重置,那么当上游和下游端口完成所需的内部初始化时,它们将进入Rx.Detect.Active子状态(无需握手)。
• 如果进入此子状态是由于Warm Reset,则面向下游的端口在完成80-100毫秒的温重启LFPS信号后,将过渡到Rx.Detect.Active子状态(无需握手)。
• 如果进入此子状态是由于Warm Reset,则面向上游的端口将在温重启LFPS信号结束时过渡到Rx.Detect.Active子状态(无需握手)。
Rx.Detect.Active
在Rx.Detect.Active子状态中的要求
这是 Rx.Detect 链路训练状态的第二个子状态。此状态的目的是在尝试链路训练之前,为连接设备提供一个检测是否存在超高速链路伙伴的机会。在Rx.Detect.Active子状态中,设备尝试确认SuperSpeed链路伙伴的存在。该方案涉及每个发射机通过电气检测远端接收器的端接阻抗。以下要求适用于LTSSM处于Rx.Detect.Active状态时。请注意,对于面向下游(DS)的端口和面向上游(US)的端口,要求略有不同。
• 所有端口的发射机都尝试感知远端接收器的端接。
• 面向上游的端口需要计数检测尝试,并在八次尝试后过渡到SS.Disabled状态。如果发生这种情况,设备将“故障转移”并尝试以USB 2.0速度建立连接。可以参考上图9-1。
Rx.Detect.Active子状态的退出规则
在Rx.Detect.Active子状态中有三种可能的退出状态。上游(US)和下游(DS)端口都遵循的退出规则:
• 如果检测到远端低阻抗接收器端接(RRX-DC),端口将过渡到Polling状态。
仅下游(DS)端口遵循的退出规则:
• 当被指示时,面向下游的端口将过渡到SS.Disabled状态。
• 如果没有检测到远端低阻抗(RRX-DC),面向下游的端口将过渡到Rx.Detect.Quiet状态。
仅上游(US)端口遵循的退出规则:
• 如果没有检测到远端低阻抗(RRX-DC),面向上游的集线器端口将过渡到Rx.Detect.Quiet状态。
• 如果没有检测到远端低阻抗(RRX-DC),并且检测尝试次数少于八次,面向上游的外围设备端口将过渡到Rx.Detect.Quiet状态。
• 如果没有检测到远端低阻抗(RRX-DC),并且检测尝试次数达到八次,面向上游的外围设备端口将过渡到SS.Disabled状态。规范指出,八次尝试规则使设备能够在大约80毫秒内“故障转移”到USB 2.0速度。
USB3.0终端电阻检测原理
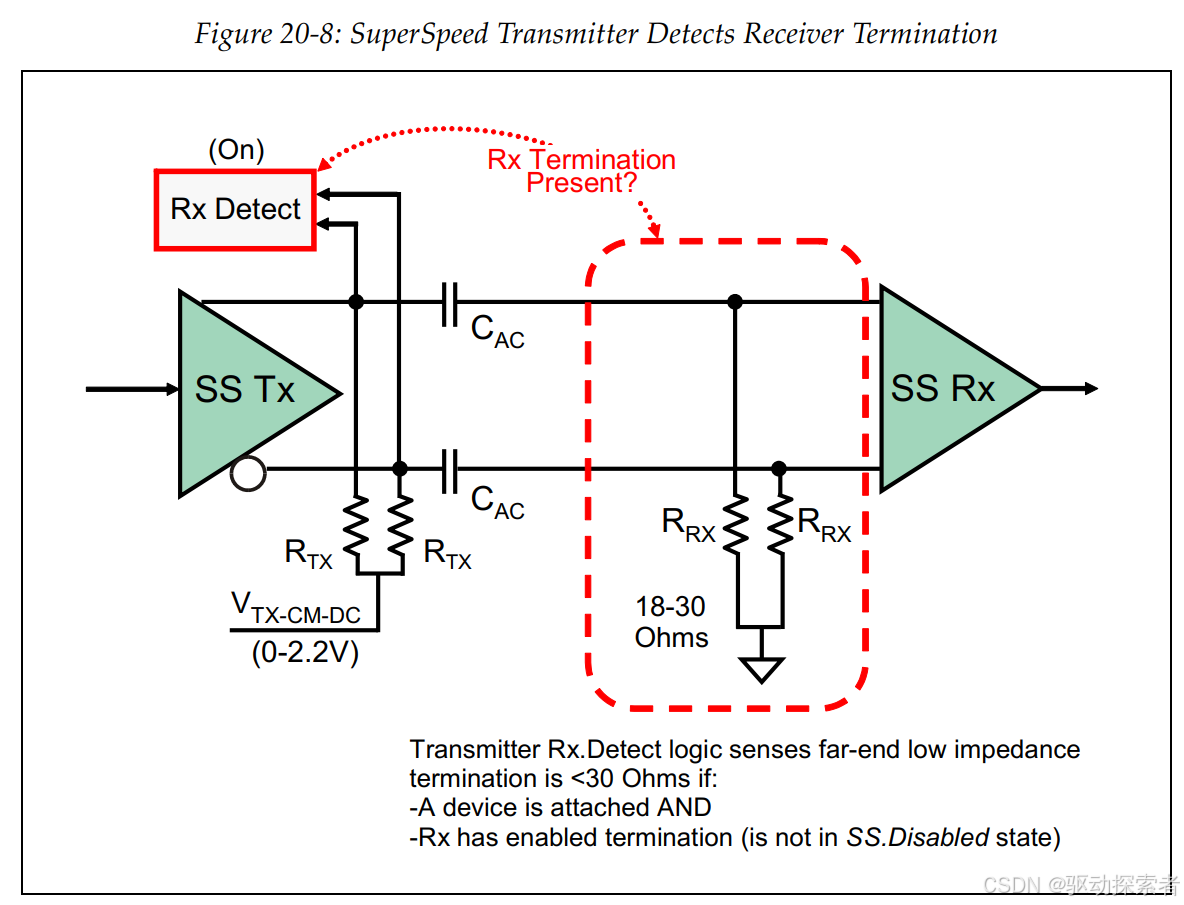
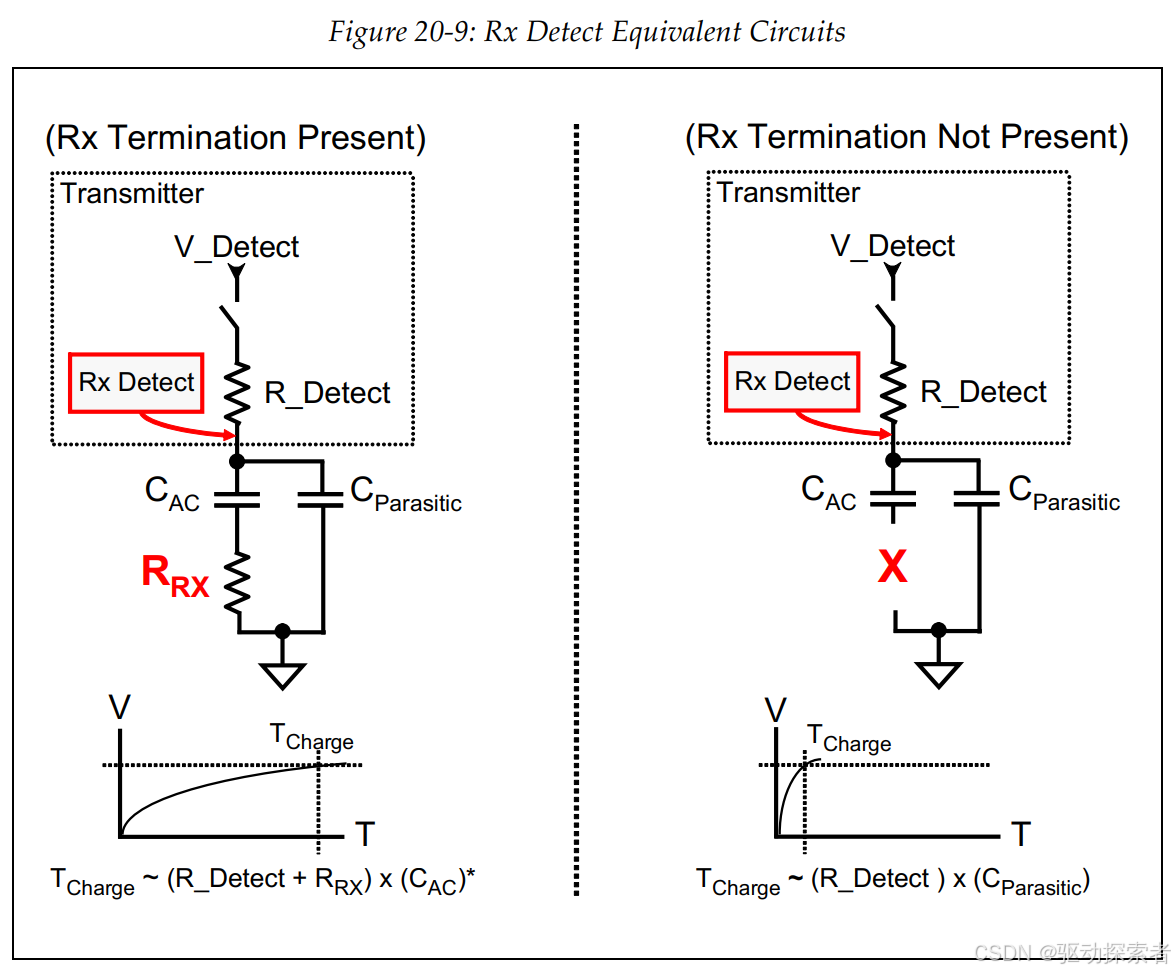
如上图20-8,20-9在USB3.0中Device连接到Host等价于连接了一个R_Term,右图为不接Device的等效电路,此时由于R_term不存在,故电路模型实际为一RC串联电路,可简单计算出时间因子:
T=R_Detect*C_Parasitic
左图为接上Device的等效电路,此时R_term存在,得出此时时间因子:
T=(R_Detect+R_Term)*(C_AC+C_Parasitic)
显然后者远远大于前者(Tcharge就是这个参数),故有无设备可根据充放电时间进行判断。计算出另外R_Term是否满足协议中规定的RTX-DC(18-30ohm)的要求,判断是否有终端电阻接入,另外接入R_term后,会对R_Detect产生分压的作用,电压会有所下降。
Rx.Detect.Quiet
在Rx.Detect.Quiet子状态中的要求
在Rx.Detect.Quiet子状态中,设备尝试在连续尝试检测链路伙伴存在之间节省电源。这在USB动态连接/移除环境中非常有用。设备在Rx.Detect状态之间每12毫秒从Rx.Detect.Active子状态转换到Rx.Detect.Quiet子状态,直到检测到链路伙伴。在Rx.Detect.Quiet期间,发射机关闭检测逻辑,并等待定时器到期,然后再次尝试。以下要求适用于LTSSM处于Rx.Detect.Quiet状态时的上游和下游端口。
• 禁用远端接收器端接检测
• 在进入子状态时启动一个12毫秒的定时器,tRxDetectQuietTimeout。
Rx.Detect.Quiet子状态的退出规则
在Rx.Detect.Quiet子状态中有两种可能的退出状态。退出规则如下:
• 每当12毫秒定时器到期时,所有端口都会过渡到Rx.Detect.Active状态。
• 当被指示时,面向下游的端口将过渡到SS.Disabled状态。
Polling
Polling是链路训练的第二步,可使设备在实际链路条件下调整其超高速发射机和接收机,以适应 5 Gb/s的运行。交换 LFPS 脉冲串和 TSEQ、TS1、TS2 有序集,可实现接收器均衡、时钟和数据恢复、差分信号反转等功能。
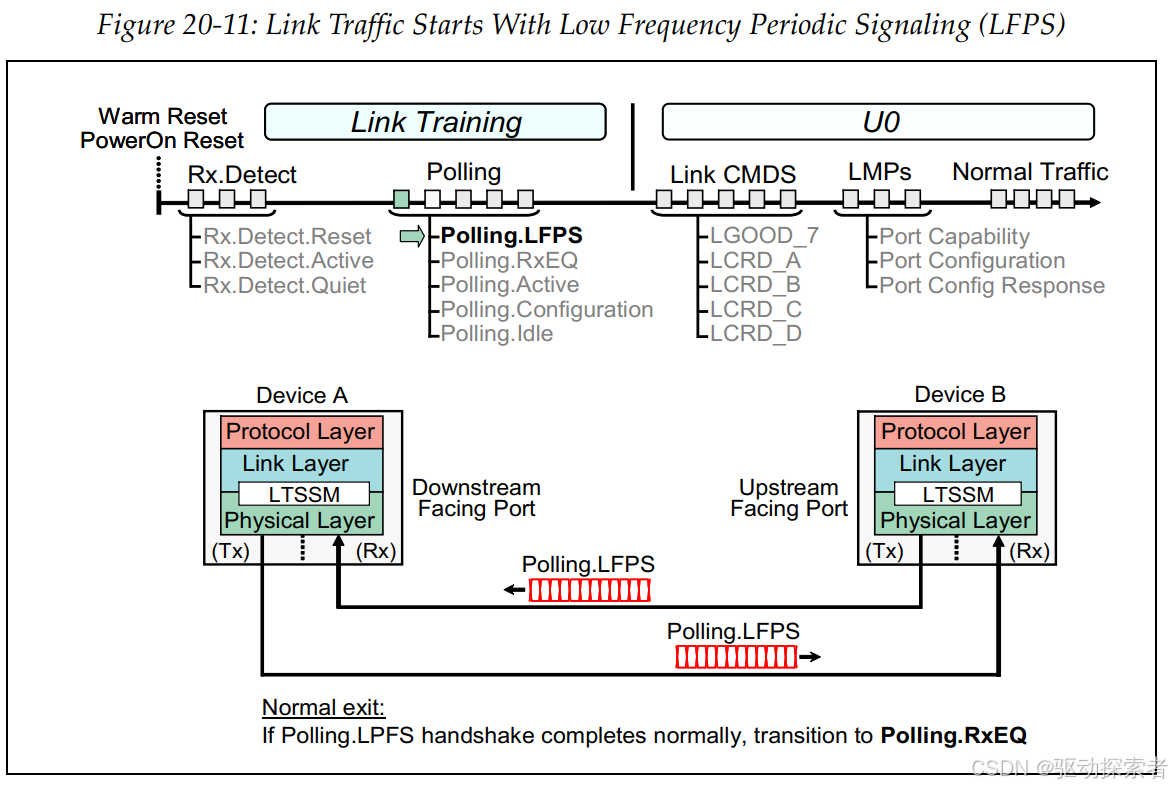
Polling.LFPS
在Polling.LFPS子状态中的要求
一旦检测到链路伙伴处于 Rx.Detect.Active,两个(上游和下游)端口都将进入轮询状态以训练链路。在Polling.LFPS子状态中,设备使用简单的10-50MHz LFPS方波建立接收器PHY直流工作点。Polling.LFPS的交换还启动了握手过程,这将携带它们完成剩余的链路训练。以下要求适用于LTSSMs处于Polling.LFPS子状态时的上游和下游端口。
• 进入Polling.LFPS子状态时,所有端口必须启用LFPS接收器检测。
• 一旦接收器检测到Polling.LFPS信号,它必须在80微秒内建立直流工作点。接收器可以选择也使用Polling.LFPS开始均衡器训练。
• 所有端口在进入Polling.LFPS子状态时启动一个360毫秒的定时器(tPollingLFPSTimeout)。
Polling.LFPS子状态的退出规则
上游(US)和下游(DS)端口都遵循的规则:
• 端口在以下条件满足时过渡到Polling.RxEQ状态:
1)至少发送了16个Polling.LFPS脉冲;
2)接收到了两个连续的Polling/LFPS脉冲;
3)在从链路伙伴接收到至少一个Polling.LFPS脉冲后发送了四个连续的Polling.LFPS脉冲。
(
polling_lfps_sent_count*(发送的LFPS突发数量)[16]
polling_lfps_received_count* (收到LFPS数量) [2]
polling_lfps_sent_after_received_count*(从链路伙伴接收到第一个 LFPS 后发送的 LFPS 突发数)[4]
)
• 如果360毫秒的Polling.LFPS定时器(tPollingLFPSTimeout)到期,并且满足另外两个条件,则端口过渡Compliance Mode状态:
1)自上次电源开启重置以来,端口从未完成Polling.LPFS;
2)成功完成Polling.LFPS握手以过渡到Polling.RxEQ尚未发生。
仅下游(DS)端口遵循的退出规则:
• 当被指示时,面向下游的端口将过渡到SS.Disabled状态。
• 当被指示发出温重启时,面向下游的端口将过渡到Rx.Detect状态。
• 如果360毫秒的Polling.LFPS定时器(tPollingLFPSTimeout)到期,并且自电源开启重置以来链路至少训练过一次,则面向下游的端口将过渡到Rx.Detect状态。
Polling.RxEq
在Polling.RxEQ子状态中的要求
在Polling.RxEQ子状态中,设备在SuperSpeed链路上交换第一次5 Gb/s的流量。发送和接收65,536个TSEQ有序集(每个TSEQ有序集32字节),允许接收器PHY完成均衡器训练。以下要求适用于LTSSMs处于Polling.RxEQ子状态时的上游和下游端口。
• 如果检测到线路极性反转,每个接收器必须进行纠正。
• 端口传输65,536个TSEQ有序集。
• 接收器基于接收到的TSEQ有序集训练均衡器逻辑。
Polling.RxEQ子状态的退出规则
上游(US)和下游(DS)端口都遵循的规则:
• 在接收器均衡完成并且向链路伙伴发送了65,536个TSEQ有序集后,端口自动过渡到Polling.Active状态。仅下游(DS)端口遵循的退出规则:
• 当被指示时,面向下游的端口将过渡到SS.Disabled状态。
• 当被指示发出温重启时,面向下游的端口将过渡到Rx.Detect状态。
仅上游(US)端口遵循的退出规则:
• 当检测到Warm Reset,面向上游的端口将过渡到Rx.Detect状态。
Polling.Active
在Polling.Active子状态中的要求
在Polling.Active子状态中,接收器均衡已完成,设备继续进行链路训练的剩余部分。在此子状态中使用TS1有序集,并且可能会看到TS2有序集,因为一个设备可能在其链路伙伴退出此子状态之前进入下一个子状态,Polling.Configuration。请注意,在Polling.Active状态下,面向下游(DS)的端口和面向上游(US)的端口的要求略有不同。
• 端口在进入时启动一个12毫秒的定时器(tPolling.ActiveTimeout)。
• 端口向链路伙伴传输TS1有序集。
• 接收器完成任何剩余的训练任务,然后准备过渡到Polling.Configuration子状态。
Polling.Active子状态的退出规则
在Polling.Active子状态中有三种可能的退出状态。
上游(US)和下游(DS)端口都遵循的退出规则:
• 当接收到八个连续且相同的TS1或TS2有序集时,端口过渡到Polling.Configuration子状态。仅下游(DS)端口遵循的退出规则:
• 当被指示时,面向下游的端口将过渡到SS.Disabled状态。
• 当被指示发出温重启时,面向下游的端口将过渡到Rx.Detect状态。
• 如果12毫秒的定时器(tPollingActiveTimeout)到期且未满足过渡到Polling.Configuration的要求,面向下游的端口将过渡到Rx.Detect状态。
仅上游(US)端口遵循的退出规则:
• 如果12毫秒的定时器(tPollingActiveTimeout)到期且未满足过渡到Polling.Configuration的要求,面向上游的集线器端口将过渡到Rx.Detect状态。
• 如果12毫秒的定时器(tPollingActiveTimeout)到期且未满足过渡到Polling.Configuration的要求,面向上游的外围设备端口将过渡到SS.Disabled状态。
• 当检测到温重启时,面向上游的端口将过渡到Rx.Detect状态。
Polling.Configuration
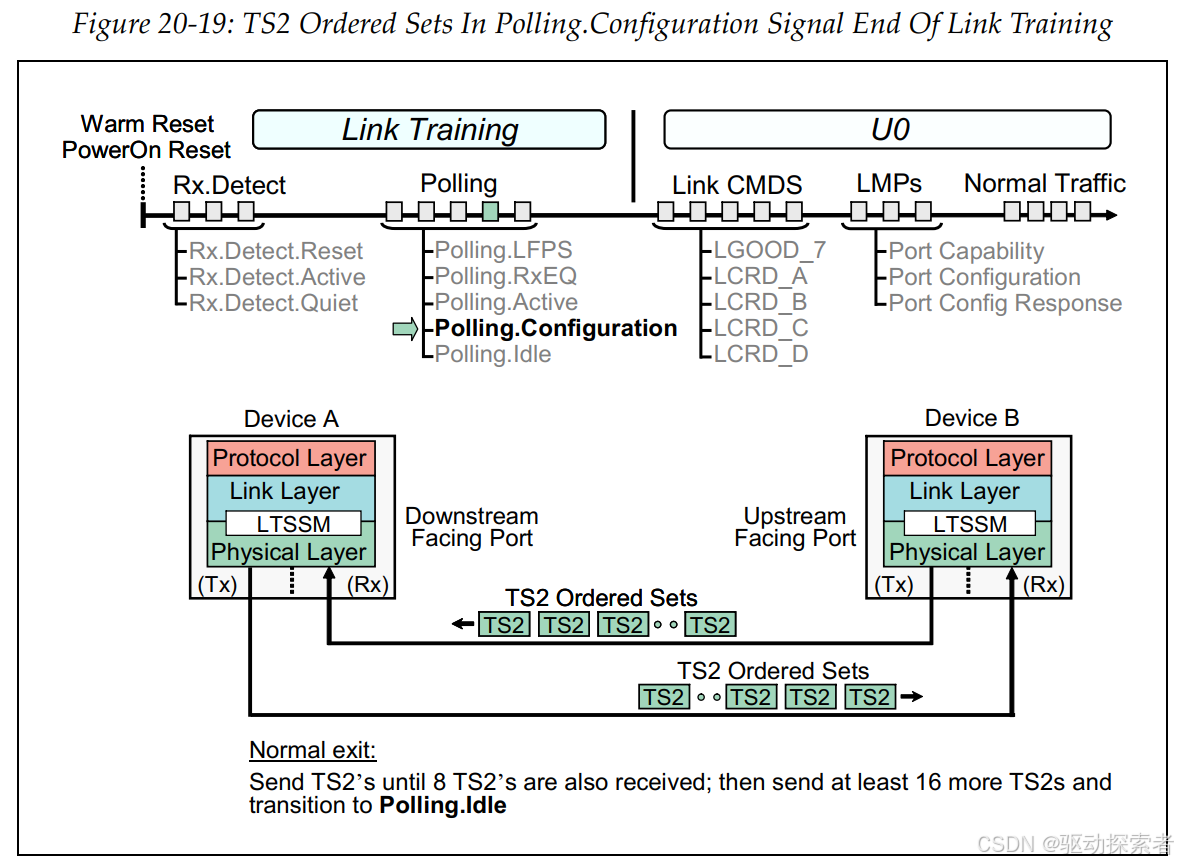
在Polling.Configuration子状态中的要求
在Polling.Configuration子状态中,链路伙伴信号表明它们已完成链路训练。此外,在此子状态中提供了设置TS2重置、环回或禁用扰码位的机会。如果设置了这些位中的一个,那么过渡到U0以外的LTSSM状态是可能的。请注意,在Polling.Configuration状态下,面向下游(DS)的端口和面向上游(US)的端口的要求略有不同。
• 端口在进入时启动一个12毫秒的定时器(tPollingConfigurationTimeout)。
• 端口向链路伙伴传输TS2有序集。端口还可以选择在TS2有序集的符号5中设置(HOt)Reset。注意:TS2重置位仅在响应从下游面向端口收到的TS2中检测到重置位设置时,由上游面向端口发送的TS2中设置。
• 端口还可以选择在TS2有序集的符号5中设置环回或禁用扰码位。Polling.Configuration子状态的退出规则
在Polling.Configuration子状态中有三种可能的退出状态。
• 当接收到八个连续且相同的TS2有序集并且发送了至少8个连续且相同的TS2后发送了16个TS2有序集时,所有端口过渡到Polling.Idle子状态。
仅下游(DS)端口遵循的退出规则:
• 当被指示时,面向下游的端口将过渡到SS.Disabled状态。
• 当被指示发出温重启时,面向下游的端口将过渡到Rx.Detect状态。
• 如果12毫秒的定时器(tPollingConfigurationTimeout)到期且未满足过渡到Polling.Idle的要求,面向下游的端口将过渡到Rx.Detect状态。
仅上游(US)端口遵循的退出规则:
• 如果12毫秒的定时器(tPollingConfigurationTimeout)到期且未满足过渡到Polling.Idle的要求,面向上游的集线器端口将过渡到Rx.Detect状态。
• 如果12毫秒的定时器(tPollingConfigurationTimeout)到期且未满足过渡到Polling.Idle的要求,面向上游的外围设备端口将过渡到SS.Disabled状态。
• 如果检测到Warm Reset,面向上游的端口将过渡到Rx.Detect状态。
Polling.Idle
在Polling.Idle子状态中的要求
在Polling.Idle子状态中,链路伙伴解码在Polling.Configuration子状态中接收到的TS2,并确定下一个LTSSM状态应该是U0、环回还是热重启。在Polling.Idle状态下,面向下游(DS)的端口和面向上游(US)的端口的要求略有不同。
• 端口在进入时启动一个2毫秒的定时器(tPollingIdleTimeout)。
• 端口解码在Polling.Configuration子状态中早些时候接收到的TS2。
• 面向下游的端口重置链路错误计数(LEC)。
• 面向上游的端口重置端口配置信息。
• 端口启用扰码,除非在接收到的TS2中明确禁用。
• 如果下一个LTSSM状态是U0,端口开始传输(逻辑)空闲符号。
• 端口准备接收来自链路伙伴的Header Sequence Number和Flow Control Credit广告。
Polling.Idle子状态的退出规则
在Polling.Idle子状态中有五种可能的退出状态。上游(US)和下游(DS)端口都遵循的退出规则:
• 当被指示并且设备能够作为环回主设备时,端口过渡到环回状态。
• 当在Polling.Configuration期间接收到带有环回位设置的TS2有序集,并且设备能够作为环回从设备时,端口过渡到环回状态。• 如果TS2有序集中没有设置环回和重置位,并且满足以下两个条件时,端口过渡到U0状态:
1)接收了八个连续的空闲符号;
2)在从链路伙伴接收至少一个空闲符号后发送了十六个连续的空闲符号。
仅下游(DS)端口遵循的退出规则:
• 当被指示时,面向下游的端口将过渡到SS.Disabled状态。
• 当被指示发出温重启时,面向下游的端口将过渡到Rx.Detect状态。
• 当被指示发出热重启时,面向下游的端口将过渡到HOT Reset状态。
• 如果2毫秒的定时器(tPollingIdleTimeout)到期且未满足过渡到U0的要求,面向下游的端口将过渡到Rx.Detect状态。
仅上游(US)端口遵循的退出规则:
• 如果2毫秒的定时器(tPollingIdleTimeout)到期且未满足过渡到U0的要求,面向上游的集线器端口将过渡到Rx.Detect状态。
• 如果2毫秒的定时器(tPollingIdleTimeout)到期且未满足过渡到U0的要求,面向上游的外围设备端口将过渡到SS.Disabled状态。
• 当检测到温重启时,面向上游的端口将过渡到Rx.Detect状态。
通过链路命令进入U0(如分析仪Enter U0,后续就开始了设备枚举)就算是链路训练完成了。
Recovery
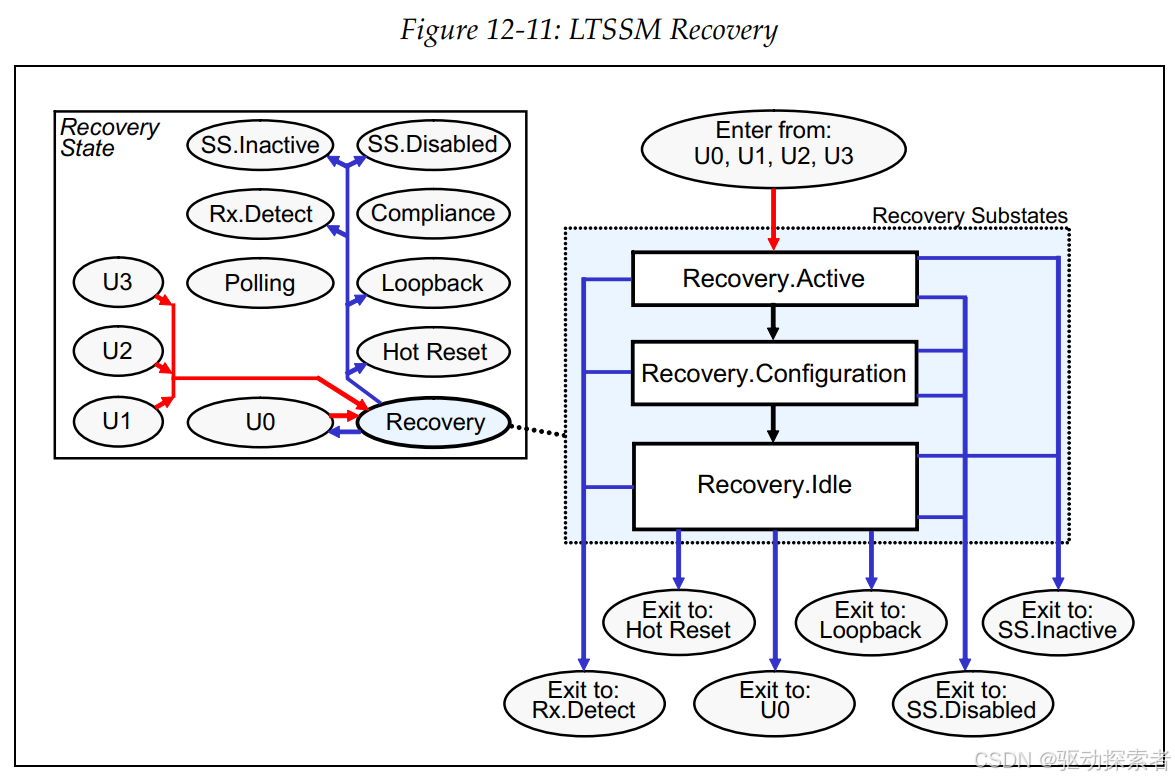
恢复提供低延迟的重训练和返回U0状态,适用于那些已经完成完整链路训练的链路。这个状态在电源管理退出、由于不可恢复的链路错误等原因时进入。由于接收器均衡和其他参数被保留,恢复是一个低延迟的事件。
注意其中Recovery.Active Recovery.Configuration Recovery.Idle不作详细描述
Hot Reset
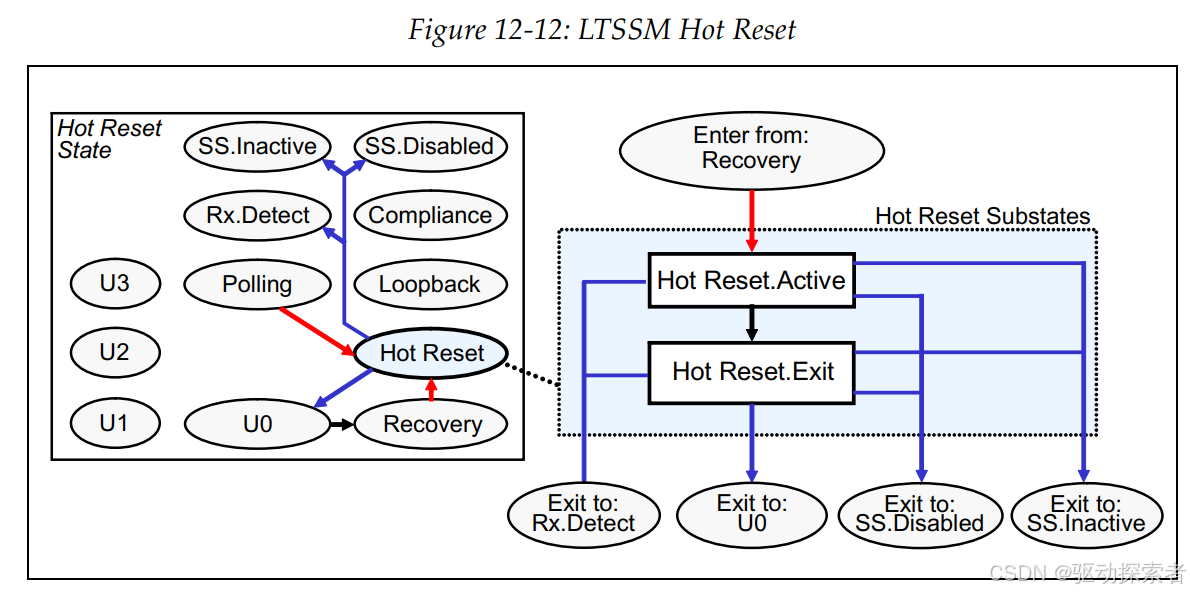
Hot Reset提供了一种低延迟的重置方法,适用于那些之前已经完成完整链路训练的链路。热重置避免了长时间的热重置和过渡到Rx.Detect以进行完整链路训练的过程,而是假设之前建立的某些物理层(PHY)参数仍然有效。如果热重置成功,链路伙伴将使用TS2有序集进行握手,初始化内部逻辑,并快速返回U0状态。热重置始终由下游面向端口在软件控制下发起。在热重置期间,所有端口将保持正常的发射器和接收器电气规格,包括低阻抗接收器端接(RRX-DC)。下游面向端口还将重置链路错误计数(LEC)、电源管理定时器和U1/U2不活动定时器。
注意:其中 Hot Reset.Active Hot Reset.Exit不作描述。
U0
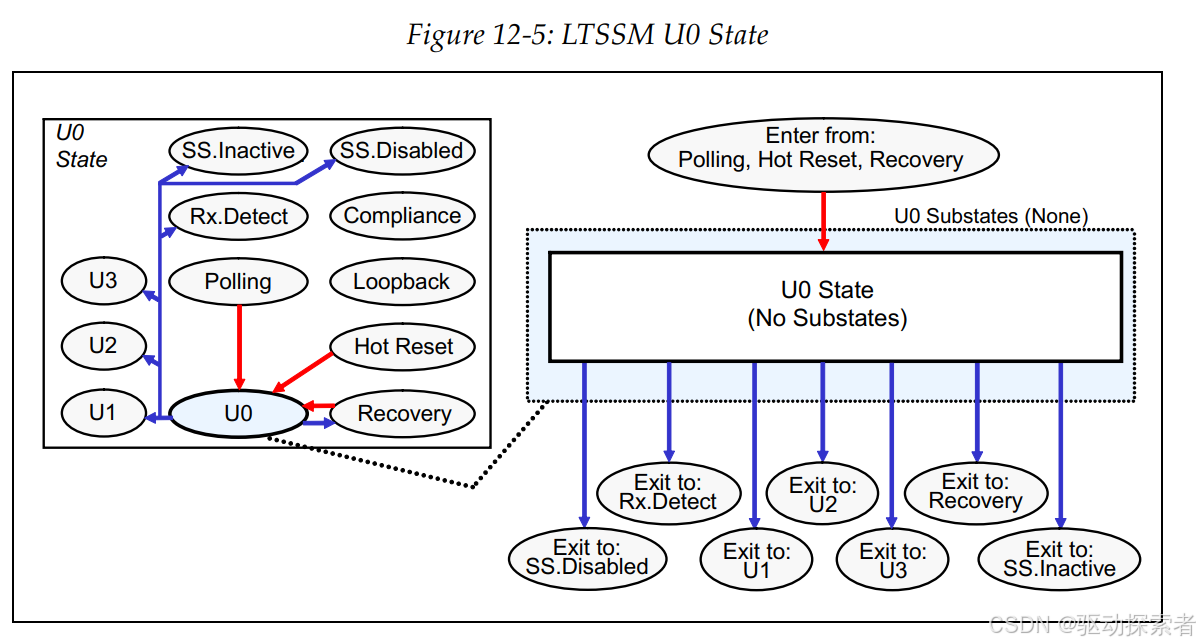
U0是SuperSpeed连接的活跃、功能状态。在这个状态下,数据包和链路命令的发送和接收不会因为链路电源管理而产生延迟。在没有其他流量的情况下,NOP(逻辑空闲)符号和时钟补偿SKP有序集使得接收器能够与发射器保持同步。
在U0状态下的要求
当LTSSM处于U0状态时,以下要求适用。请注意,对于面向下游(DS)的端口和面向上游(US)的端口,要求略有不同。
• 端口必须遵守所有U0发射器和接收器的电气规格,包括低阻抗接收器端接,RRX-DC。
• 启动1毫秒的tU0RecoveryTimeout定时器,以跟踪连续入链路命令之间的间隔。每当接收到链路命令时,定时器都会重新启动。
• 在进入U0时,也启动一个10微秒的tU0LTimeout定时器。这个定时器跟踪连续发送给链路伙伴的链路命令之间的总线空闲间隔。在发送第一个出链路命令的符号时重置定时器,并在发送最后一个符号时开始倒数,链路进入逻辑空闲状态。
• 如果没有其他链路流量,并且10微秒的tU0LTimeout定时器(见前述项目)到期,面向下游的端口将发送一个LDN链路命令;面向上游的端口将发送一个LUP链路命令。这些链路命令重新确认链路仍在正常工作,合作伙伴仍然处于U0状态。
U0状态的退出规则
从U0状态有七种可能的退出方式(见第12-5页的图)。
上游(US)和下游(DS)端口都遵循的退出规则:
• 如果LGO_U1握手成功完成,端口将过渡到U1。
• 如果LGO_U2握手成功完成,端口将过渡到U2。
• 如果LGO_U3握手成功完成,端口将过渡到U3。注意,只有面向下游的端口,在软件控制下,才能发起到U3(挂起)的过渡。
• 如果被指示,端口将过渡到恢复状态。
• 如果检测到TS1有序集,端口将过渡到恢复状态。
• 对于与头部数据包流控制和错误处理相关的各种错误条件,端口将根据规范中的定义过渡到恢复状态。这包括PENDING_HP_TIMER、CREDIT_HP_TIMER超时,重播计数器溢出等。
• 当PENDING_HP_TIMER超时第四次时,端口将过渡到SS.Inactive。
仅下游(DS)端口遵循的退出规则:
• 当被指示时,面向下游的端口将过渡到SS.Inactive。
• 如果U3入口握手失败三次,面向下游的端口将过渡到SS.Inactive。
• 当被指示时,面向下游的端口将过渡到SS.Disabled。
• 当被指示对链路发出温重启时,面向下游的端口将过渡到Rx.Detect状态。
• 如果tU0Recovery定时器到期,表示在1毫秒内没有收到数据包或链路命令(包括LUP),面向下游的端口将过渡到恢复状态。
仅上游(US)端口遵循的退出规则:
• 自行供电设备的上游面向端口当VBUS关闭时,将过渡到SS.Disabled。
• 当检测到温重启时,上游面向端口将过渡到Rx.Detect。
• 当被指示时,上游面向端口将过渡到SS.Disabled。这发生在进入U0状态后,如果在规定的时间内没有收到端口能力LMP。
• 上游面向端口在tU0Recovery定时器到期时,如果1毫秒内没有收到数据包或链路命令(包括LDN),将过渡到恢复状态。
U1
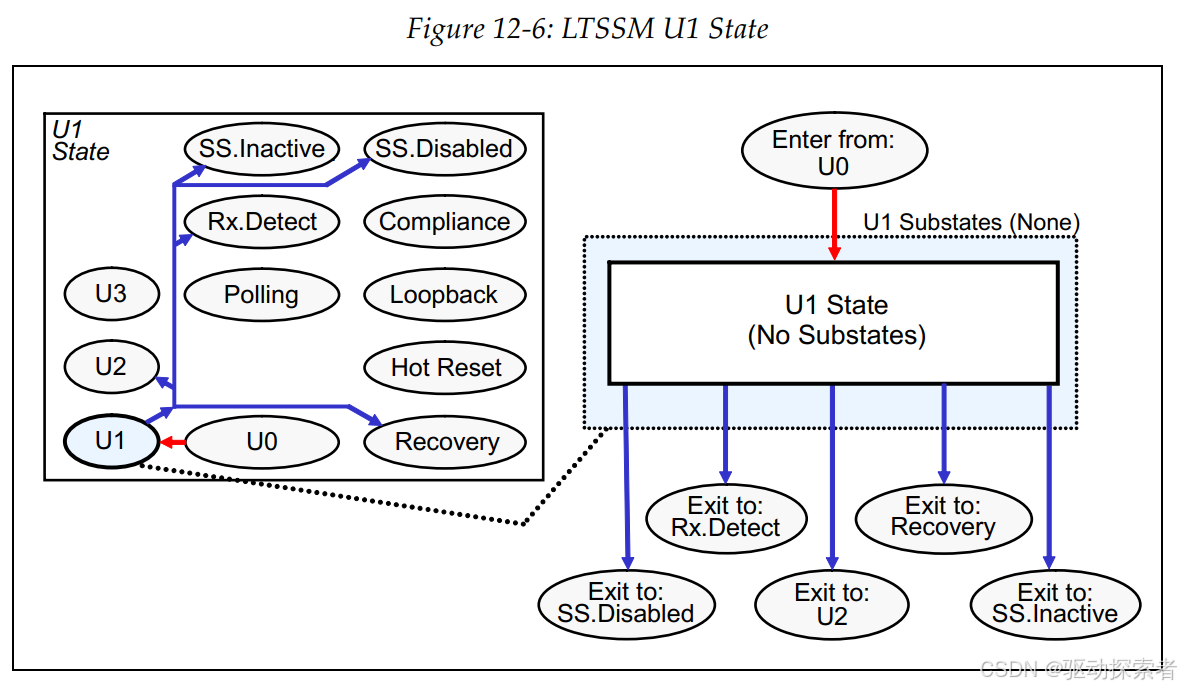
U1是一个电源管理状态,在这个状态下,链路被禁用以在空闲时间节省电源。U1状态被假设为比U2状态节省的电源少,但在需要返回U0状态时具有较短的“退出延迟”。USB 3.0描述符使软件能够确定每个设备的U1和U2退出延迟。这些信息使电源管理软件能够为每个链路做出明智的电源管理决策。
在U1状态下的要求
在LTSSM处于U1状态时,以下要求适用。请注意,对于面向下游(DS)的端口和面向上游(US)的端口,要求略有不同。
• 端口接收器必须保持低阻抗接收器端接,RRX-DC。
• 端口发射器必须保持SuperSpeed发射器的直流共模电压,符合VTX-CM-DC-ACTIVE-DELTA的规定。
• 端口必须保持LFPS检测启用,以便识别U1退出LFPS信号。
• 面向上游的端口还必须检测Warm Reset LFPS信号。
• 当启动从U1状态退出时,端口启用LFPS发射器。
• 端口在进入U1时启用U2不活动定时器倒计时(如果U2不活动定时器的值大于0)。
• 面向下游的端口保持启用,以检测Ping.LFPS,并启用300毫秒的tU1PingTimeout定时器,以验证链路伙伴定期发送Ping.LFPS。
• 面向上游的端口每隔160-240毫秒发送Ping.LFPS。
U1状态的退出规则
在U1状态有五种可能的退出状态。
上游(US)和下游(DS)端口都遵循的退出规则:
• 如果启用了U2不活动定时器并且到期,端口将无声地过渡到U2。
• 如果U1退出LFPS握手信号完成成功,端口将过渡到恢复状态。
• 如果U1退出LFPS握手信号失败,并且2毫秒的tNoLFPSResponseTimeout超时,端口将过渡到SS.Inactive。
仅下游(DS)端口遵循的退出规则:
• 当被指示时,面向下游的端口将过渡到SS.Disabled。
• 当Ping.LFPS未收到并且300毫秒的tU1PingTimeout超时时,面向下游的端口将过渡到Rx.Detect状态。
• 当被指示对链路发出温重启时,面向下游的端口将过渡到Rx.Detect状态。
仅上游(US)端口遵循的退出规则:
• 自行供电设备的上游面向端口当VBUS关闭时,将过渡到SS.Disabled。
• 当检测到Warm Reset时,上游面向端口将过渡到Rx.Detect。
U2
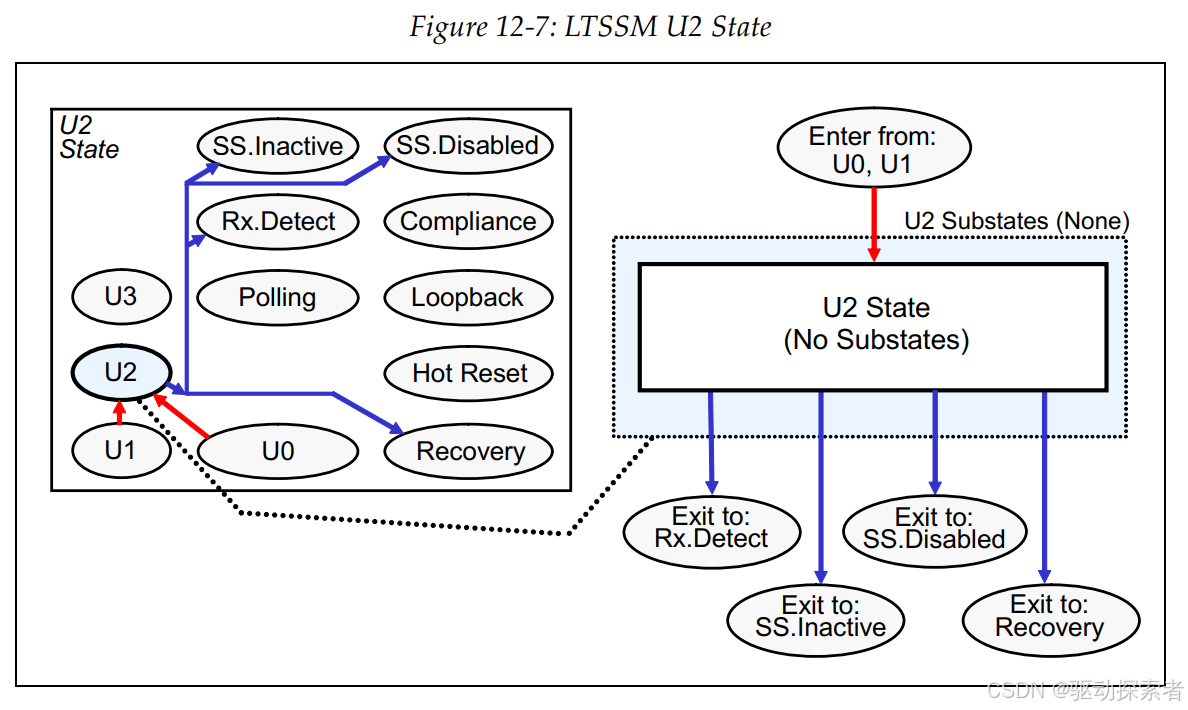
U2是一个电源管理状态,在该状态下,链路在空闲时间被禁用以节省电源。U2状态被假设为比U1状态节省更多的电源,但在需要返回U0状态时具有更长的“退出延迟”。USB 3.0描述符使软件能够确定每个设备的U1和U2退出延迟。这些信息使电源管理软件能够为每个链路做出明智的电源管理决策。
在U2状态下的要求
在LTSSM处于U2状态时,以下要求适用。请注意,对于面向下游(DS)的端口和面向上游(US)的端口,要求略有不同。
• 端口发射器不需要保持SuperSpeed发射器的直流共模电压在规格VTX-CM-DC-ACTIVE-DELTA内。
• 端口接收器必须保持低阻抗接收器端接,RRX-DC。
• 端口必须保持LFPS检测启用,以便识别U2退出LFPS信号。• 面向上游的端口还必须检测温重启LFPS信号。
• 当启动从U2状态退出时,端口启用LFPS发射器。
• 面向下游的端口必须意识到链路伙伴可能处于U1或U2状态,因为U2不活动转换是无声的。如果伙伴处
于U1状态,它将每200毫秒发送Ping.LFPS;面向下游的端口必须区分Ping.LFPS和U1 LFPS退出信号。
• 面向下游的端口必须每100毫秒进行远端接收器端接检测(使用tU2RxdetDelay超时)。
U2状态的退出规则
在U2状态有四种可能的退出状态。
上游(US)和下游(DS)端口都遵循的退出规则:
• 如果U2退出LFPS握手信号完成成功,端口将过渡到恢复状态。
• 如果U2退出LFPS握手信号失败,并且2毫秒的tNoLFPSResponseTimeout超时,端口将过渡到SS.Inactive。
仅下游(DS)端口遵循的退出规则:
• 当被指示时,面向下游的端口将过渡到SS.Disabled。
• 当检测到远端高阻抗端接ZRX-HIGH_IMP_DC_POS时,面向下游的端口将过渡到Rx.Detect状态。
• 当被指示对链路发出温重启时,面向下游的端口将过渡到Rx.Detect状态。
仅上游(US)端口遵循的退出规则:
• 自行供电设备的上游面向端口当VBUS关闭时,将过渡到SS.Disabled。
• 当检测到Warm Reset时,上游面向端口将过渡到Rx.Detect。
U3 (Suspend)
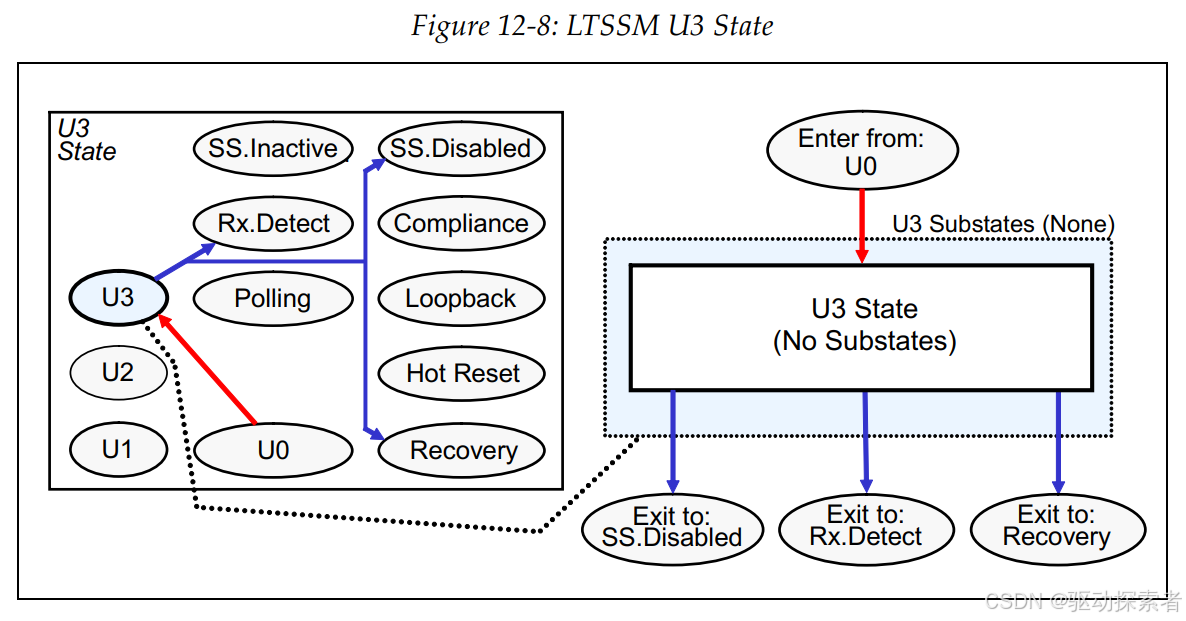
U3是挂起电源管理状态,提供最大的电源节省,但涉及最长的退出延迟。与进入U1和U2电源管理状态的硬件控制不同,U3状态的进入总是由软件发起的。请求进入U3的请求起源于下游面向端口。
在U3状态下的要求
在LTSSM处于U3状态时,以下要求适用。请注意,对于面向下游(DS)的端口和面向上游(US)的端口,要求略有不同。
• 端口发射器不需要保持SuperSpeed发射器的直流共模电压在规格VTX-CM-DC-ACTIVE-DELTA内。
• 端口接收器必须保持低阻抗接收器端接,RRX-DC。
• 端口必须保持LFPS检测启用,以便识别U3退出LFPS信号。
• 面向上游的端口还必须检测温重启LFPS信号。
• 当启动从U3状态退出时,端口启用LFPS发射器。
• 面向上游的端口不发送Ping.LFPS。• 面向下游的端口禁用Ping.LFPS检测。
• 面向下游的端口每100毫秒进行远端接收器端接检测(使用tU3RxdetDelay超时)。
• 与U1和U2状态不同,如果在10毫秒的tNoLFPSResponseTimeout内无法响应U3退出LFPS信号,不会导致过渡到SS.Inactive。如果端口无法在其链路伙伴的U3退出LFPS信号内响应,当准备好返回U0时,它可以启动U3 LFPS唤醒。在重新尝试唤醒之前,应观察100毫秒的延迟(tU3WakeupRetryDelay)。
U3状态的退出规则
在U3状态有三种可能的退出状态。
上游(US)和下游(DS)端口都遵循的退出规则:
• 如果U3退出LFPS握手信号完成成功,端口将过渡到恢复状态。
• 如果U3退出LFPS握手信号失败,并且10毫秒的LFPS握手超时(tNoLFPSResponseTimeout)到期,端口将保持在U3状态。在延迟100毫秒(tU3WakeupRetryDelay)后,设备可以选择发送U3 LFPS唤醒信号以唤醒主机,当准备好返回U0时。
仅下游(DS)端口遵循的退出规则:
• 当被指示时,面向下游的端口将过渡到SS.Disabled。
• 当检测到远端高阻抗端接ZRX-HIGH_IMP_DC_POS时,面向下游的端口将过渡到Rx.Detect态。
• 当被指示对链路发出温重启时,面向下游的端口将过渡到Rx.Detect状态。仅上游(US)端口遵循的退出规则:
• 自行供电设备的上游面向端口当VBUS关闭时,将过渡到SS.Disabled。
Compliance Mode
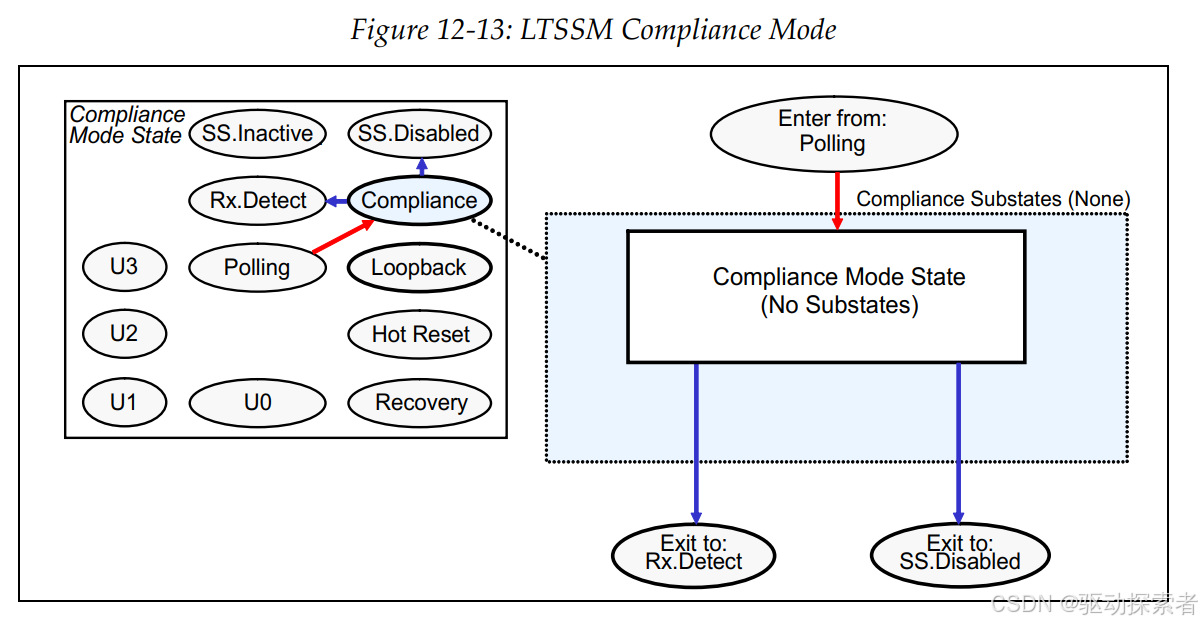
将从轮询过程中输入Compliance Mode。LFPS子状态,用于验证超高速发射器满足各种可能的USB 3.0物理通道的电压等规定,比如USB眼图测试。
Compliance Mode的要求
在Compliance Mode下,以下要求适用。请注意,Compliance Mode通常涉及一个测试夹具和一个待测设备(DUT)。DUT是九种测试模式的来源;它的链路伙伴负责在每次需要推进测试模式时发送Ping.LFPS脉冲(CP0-CP8)。
• 端口保持低阻抗接收器端接,RRX-DC。• 端口启用LFPS接收器。
• 负责发送合规测试模式的端口在发送第一个Compliance Mode(CP1)之前,必须符合SuperSpeed发射器的直流共模电压规范,VTX-CM-DC-CM。
• 端口在检测到Ping.LFPS时发送下一个Compliance Mode。
• 当最后一个Compliance Mode(CP8)处于活动状态并且再次接收到Ping.LFPS时,第一个模式(CP0)会连续发送,直到检测到Compliance Mode退出。
Compliance Mode退出规则
如图12-13所示,有两条可能的退出路径。
• 面向下游的端口在收到指示时将过渡到SS.Disabled状态。
• 面向下游的端口在收到指示对链路发出温重启时将过渡到Rx.Detect状态。
• 面向上游的端口在检测到温重启时将过渡到Rx.Detect状态。
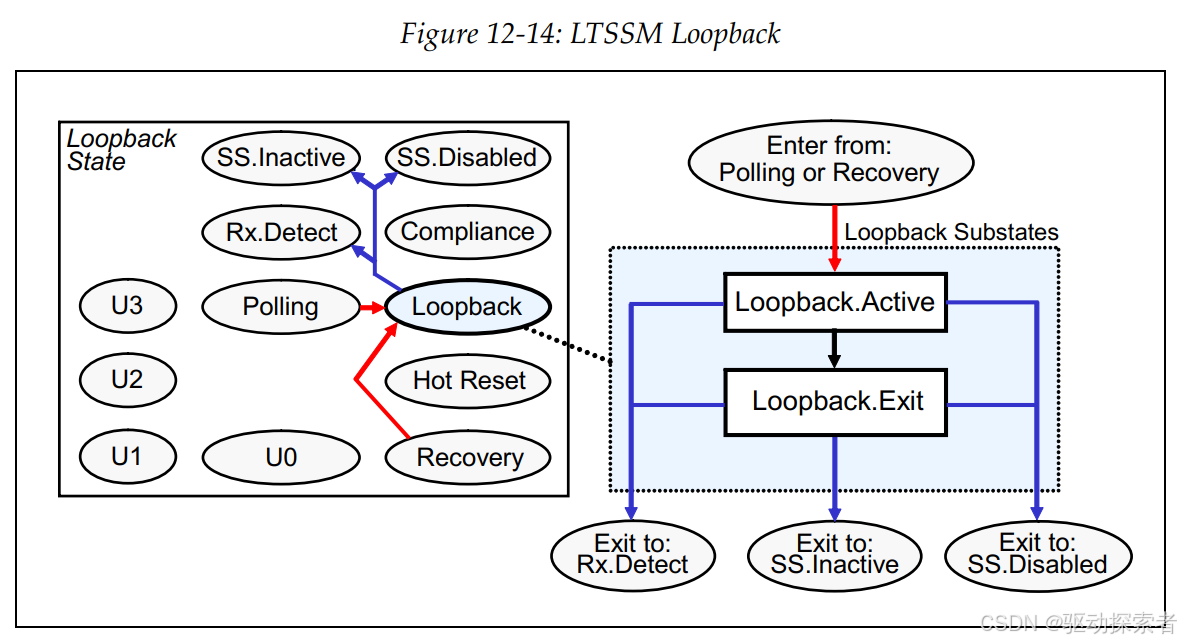
Loopback
回环测试提供了一种标准的方法来量化SuperSpeed链路的比特错误率(BER),并帮助隔离链路本身发生的错误与与内部设备硬件问题、协议违规等相关的错误。在环回配置中有一个主设备和一个从设备。主设备通过在TS2中设置环回位来启动环回,然后提供环回数据。从设备重传发送给它的环回数据。主设备检查返回的数据是否有错误。
SS.Inactive
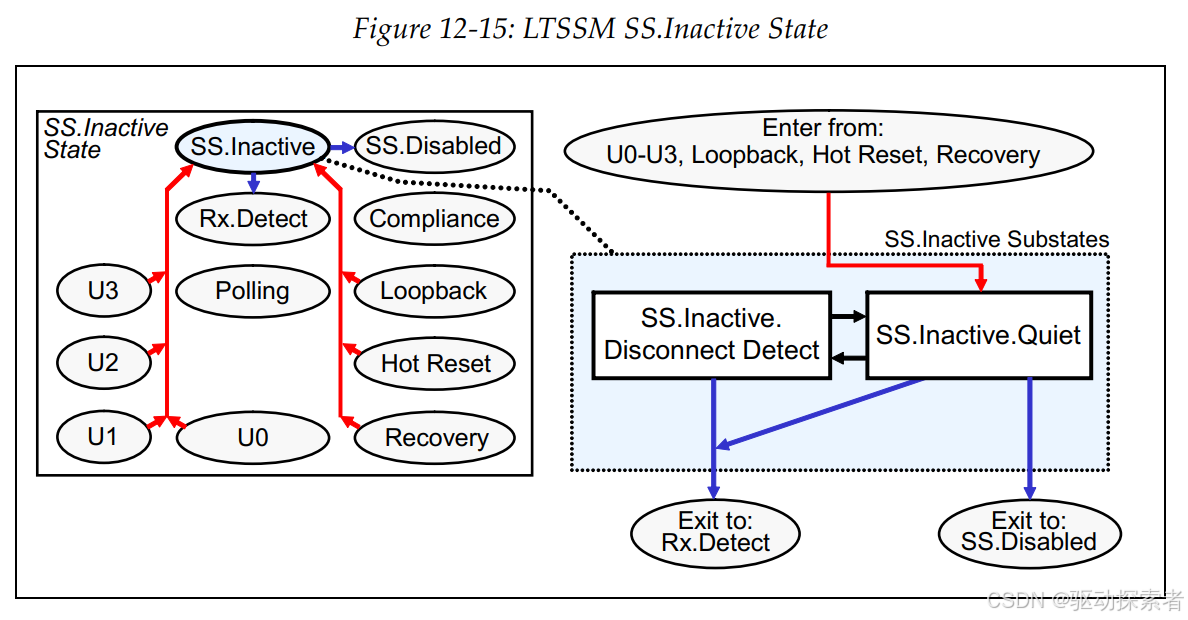
SS.Inactive状态是在链路无法操作的错误发生后进入的,需要软件干预。在SS.Inactive状态下,每个端口定期检查远端低阻抗接收器端接(RRX-DC)。如果检测不到,可能意味着设备已被移除。
SS.Disabled State
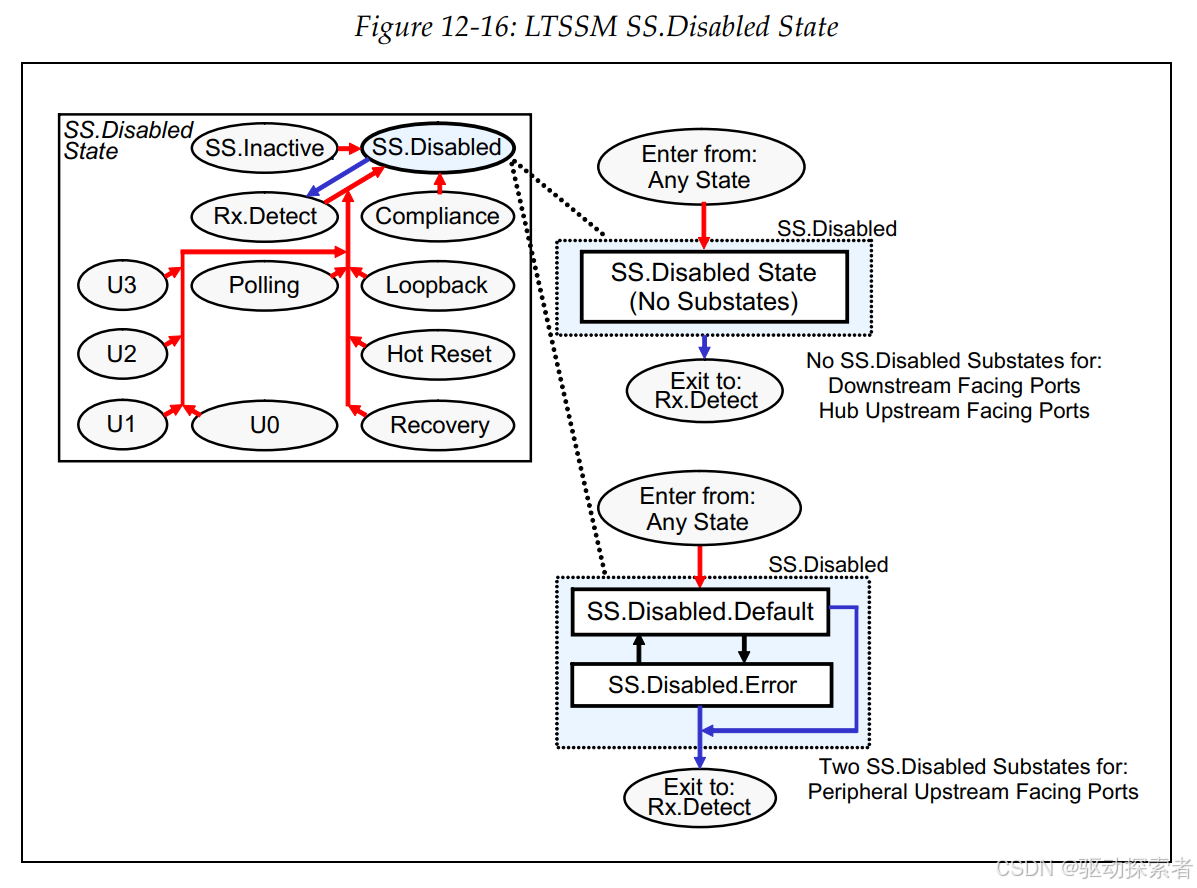
在SS.Disabled状态中,SuperSpeed连接被禁用,端口移除了其低阻抗接收器端接。面向下游的端口可以从任何其他LTSSM状态被指示进入SS.Disabled。对于面向上游的外围设备端口,在链路训练中尝试连接八次失败后进入SS.Disabled。任何USB 2.0重置都会导致面向上游的外围设备端口重新尝试SuperSpeed链路训练三次。如果这仍然失败,链路将保持禁用SuperSpeed。USB 2.0接口仍然可用。
USB3.0识别主要是参考 Far-end Receiver Termination RX Detect USB终端阻抗实现,如果没有检测到终端将降到USB2.0枚举。




)

![[C++] Git 使用教程(从入门到常用操作)](http://pic.xiahunao.cn/[C++] Git 使用教程(从入门到常用操作))


)
)


)

(一))


-- 所有权与借用)
认证与踩坑记录)