我们来详细解析无感FOC(无传感器磁场定向控制)中的高频方波注入(High-Frequency Square-Wave Injection, HFSWI) 的原理。
这是一个用于零低速或极低速范围内估算转子位置的核心技术。
核心思想与要解决的问题
在电机静止或转速极低时:
反电动势(Back-EMF)为0或非常微弱。基于反电动势观测器的无感FOC方法会完全失效,因为无法从测量信号中提取有效的转子位置信息。
电机需要启动或稳定运行在低速下(例如,从0 RPM启动,或几Hz的频率下运行)。
高频方波注入法的核心思想是: 主动向电机注入一个高频的激励信号(方波),然后通过检测电机对这个特定激励的响应,来解调出转子的位置信息。它不依赖于反电动势,而是依赖于电机的凸极性(Saliency)。
基本原理(分步解析)
第1步:前提 - 电机的凸极性
大多数永磁同步电机(PMSM)和IPMSM(内置式永磁同步电机)都存在凸极性。这意味着转子的物理结构(如磁钢嵌入铁芯导致的磁路不对称)使得电机在直轴(d-axis) 和 交轴(q-axis) 上的电感不同(Ld ≠ Lq)。
这种电感差异是高频注入法能够工作的物理基础。转子位置的变化会导致这种电感差异在静止坐标系下表现为阻抗的变化。
第2步:注入高频电压方波
在估计的同步旋转坐标系(d-q轴)或静止坐标系(α-β轴)上,叠加一个高频电压方波信号。
最常见的是在估计的d轴上注入:
V_dh = V_inj * sign(sin(ω_h * t))
其中:
V_inj是注入电压的幅值(通常很小,例如几伏)。ω_h是注入的角频率(通常为几百Hz到几kHz)。q轴的注入电压V_qh = 0。
这个高频电压信号会产生一个高频电流响应。由于频率很高,这个高频电流成分远高于电机正常运行的基础波电流,因此可以被滤波器分离出来。
第3步:提取高频响应电流
通过带通滤波器(BPF)或简单的低通/高通滤波器,从测量的相电流中分离出高频响应电流分量 i_dh和 i_qh。
第4步:解调与位置误差提取(关键步骤)
这是整个原理中最精妙的部分。高频电流响应的幅值包含了转子位置信息。
建立关系:理论分析和数学推导可以证明,在高频激励下,电机主要表现为一个感性负载。高频电流响应的幅值与电感成反比。由于
Ld ≠ Lq,电流响应的大小会随着转子角度变化。误差信号生成:通过特定的解调算法(例如,对高频电流信号进行包络检波或与注入信号同步解调),可以提取出一个包含转子位置误差的信号。
一个非常经典的方法是使用 锁相环(PLL) 结构。解调出的误差信号 ε可以表示为:
ε ∝ sin(2 * (θ_est - θ_real))
其中:
θ_est是观测器估算的转子角度。θ_real是真实的转子角度。
第5步:闭环校正
将这个误差信号 ε输入到一个PI调节器(作为PLL的环路滤波器)。PI调节器的输出自动校正估算的转子电角速度 ω_est。对 ω_est进行积分,就得到了更新的转子位置估计值 θ_est。
当估算位置 θ_est收敛到真实位置 θ_real时,误差信号 ε趋于零,系统进入锁定状态。
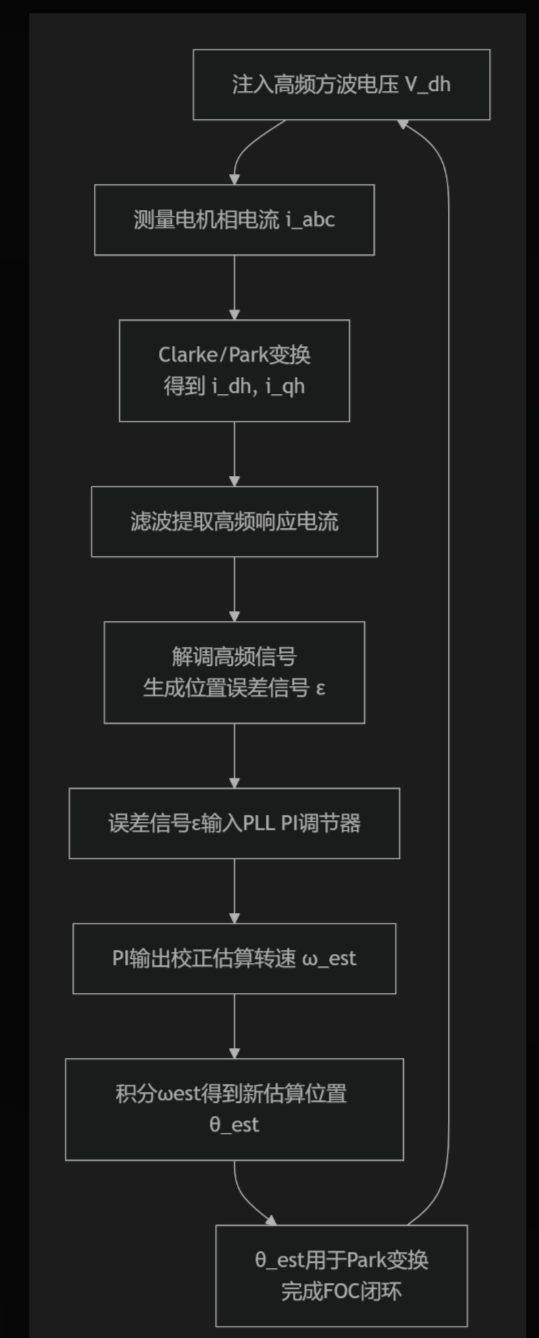
流程总结
整个过程的控制闭环可以简化为以下流程图:
优缺点
优点:
可在零速和极低速下稳定运行,这是其最大价值。
不依赖于电机反电动势,启动扭矩大,启动特性好。
对电机参数(如电阻)变化不敏感。
缺点:
会带来可闻的高频噪声(因为注入的是几百Hz的方波,正好在人耳敏感范围内)。这是该技术最主要的缺点。
会产生额外的铁损和铜损,降低系统效率,可能引起电机发热。
算法相对复杂,需要额外的信号处理和解调。
依赖于电机的凸极性。对于表面贴式永磁同步电机(SPMSM)这种凸极性不明显的电机,效果会很差甚至无法工作。
应用场景
主要用于对低速性能要求极高,且对噪声和效率不是极度敏感的场景:
伺服系统的初始定位和低速控制。
电动汽车的零速启动和爬行。
家电(如空调压缩机)的启动。
无人机螺旋桨的启动(防止卡死)。
希望这个分步解析能帮助你彻底理解高频方波注入的原理!



















