1.引言
最近想学习一下多相电机。想从相对简单的开始吧,先学一个基于双dq的六相/双三相PMSM驱动控制(考虑中性点隔离以及不隔离的情况,即考虑是否有零序电流回路),后面有时间再学学基于VSD的六相/双三相PMSM驱动控制。
(PS:学的广是出于兴趣,同时也是为以后铺路,大家还是要找好自己的主线。我目前不是博士,广学知识对我无害。知乎发的内容也是我自己刚学的,看看就好,不必深究。)
本篇内容的参考文献:
[1]李志坚. 对称六相电机驱动系统的相电流优化控制方法研究[D]. 四川:电子科技大学,2024.
[2] W. Kong et al., "Comparative Study of Harmonic Current Suppression Control Strategies for Six-Phase DC-Biased Vernier Reluctance Machines," in IEEE Transactions on Industry Applications, vol. 54, no. 6, pp. 5843-5855, Nov.-Dec. 2018.
[3]梁戈.双三相永磁同步电机优化控制策略与低载波比同步调制技术研究[D].湖南大学,2023.
2.多相电机的优点[1]
优点1:当电机功率保持不变时,多相电机的多个桥臂具有分散承担电机功率的功能。同时多相电机在设计上可以更好利用磁场和电流,通常具有更高的功率密度。在相同的尺寸和重量下,多相电机可以提供更大的功率输出。
优点2:电机相数的增加会增加空间谐波阶次,这样可以能够降低电机系统运行过程中产生的低频振动和噪声,提升调速系统的稳态运行性能。
优点3:多相电机在稳态运行时具有更高的容错性。传统三相电机发生缺相故障时,大多都无法实现自启动。多相电机由于相冗余,当一路或者多路发生故障时,只要正常运行相数不少于三相系统都可正常降频运行无需停机重组,结合适当的容错控制策略都可以保证电机稳定运行。因此在对可靠性要求较高的应用场景下,多相电机特具有显著优势。
优点4:桥臂的增多和可选择绕组结构类型的增多使得电机控制更加灵活,对不同绕组结构下的电流控制、故障诊断以及容错性能控制提供了更多的可研究性,同时拓展了多相电机在不同应用场景下的可选择性(例如多相电机驱动相对于三相电机驱动更容易实现共模电压抑制)。同时,桥臂的增多丰富了调制策略中矢量的选择,电机相数的增加,可选择的电压矢量也呈 2 的幂次增长。
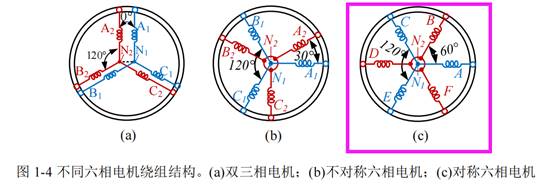
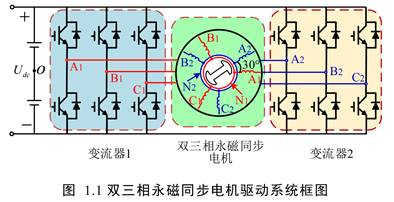
3.六相电机的分类及其控制自由度[1]
本篇知乎学习的是对称六相电机,相邻绕组之间互差60度。
再从中性点是否隔离来分,又可分成中性点隔离型(即上图N1-N2断开)以及中性点连接型(即上图N1-N2连接)。
对于中性点隔离型,对称六相电机可以看作两套三相绕组,每套三相绕组是2个控制自由度,所以加起来就是4个控制自由度。如下图所示,电流环需要四个电流调节器即可控制六相电机的电流。
对于中性点连接型,对称六相电机在原有地4个控制自由度的基础上,增添了一个零序回路,电机会出现零序电流。所以一共是5个控制自由度。如下图所示,电流环需要5个电流调节器才可控制六相电机的电流。
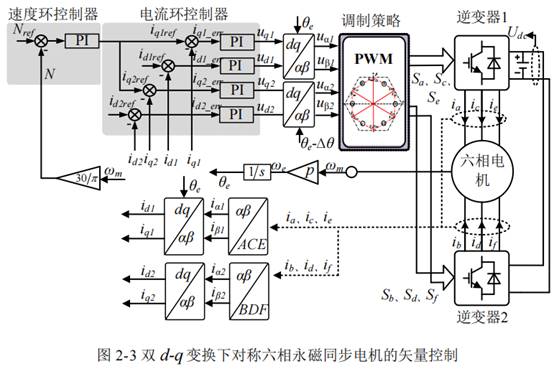
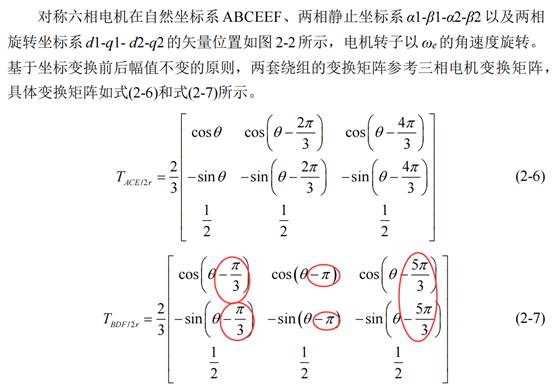
4.基于双dq坐标系的六相电机驱动
4.1双dq坐标系[1]
双dq坐标系,顾名思义就是采用两个dq坐标系对六相电机进行驱动。如前面展示的六相电机绕组分别可以看出,两套三相绕组互差60度,所以在坐标变换的时候,要注意两套绕组坐标变换角度也是互差60度。
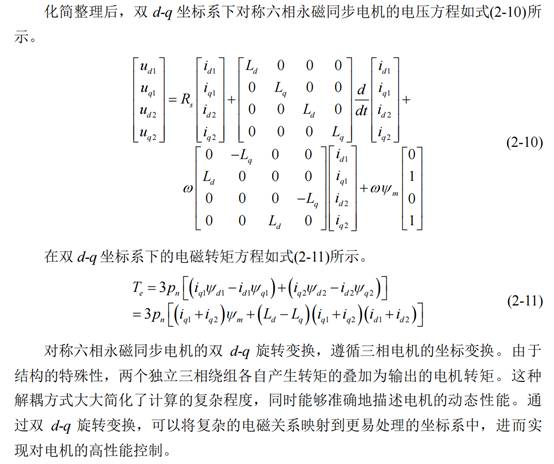
六相电机在双dq坐标系下的电机数学模型如下:
4.2零序回路模型[1][2]
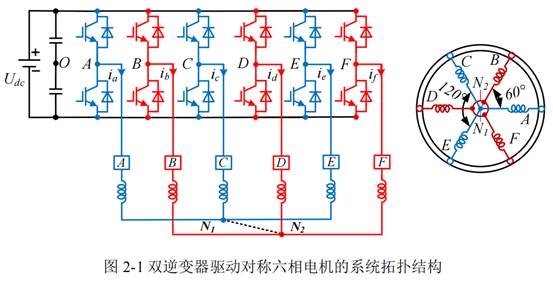
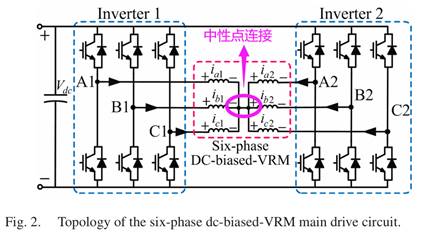
当六相电机的中性点N1-N2连接在一块时(拓扑示意图如下,参考文献[2]),电机便会出现零序电流。
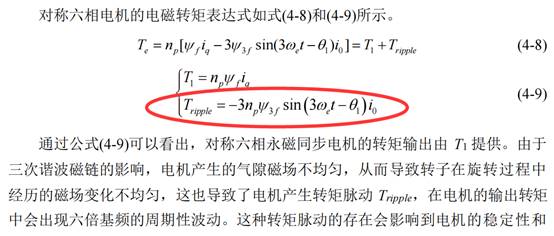
考虑零序回路的六相电机电压方程如下:
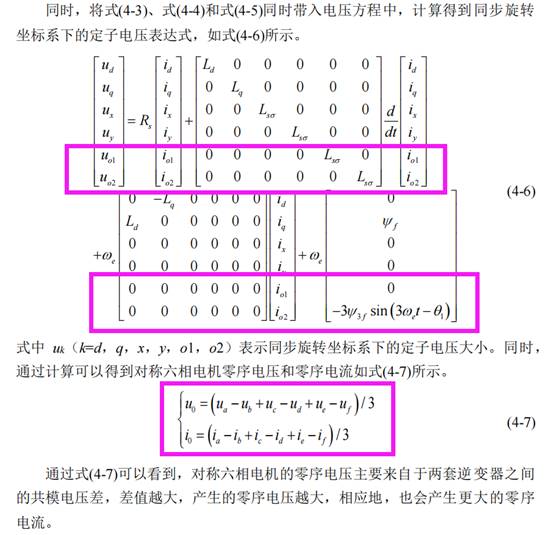
同时,由于永磁体一般会存在三次谐波反电势,三次谐波反电势会和零序电流作用产生谐波转矩脉动。(永磁体由于设计的原因,通常都是会有比较大的三次谐波的,可以看看我这篇知乎贴的反电势波形)https://zhuanlan.zhihu.com/p/1905565017463558402![]() https://zhuanlan.zhihu.com/p/1905565017463558402
https://zhuanlan.zhihu.com/p/1905565017463558402
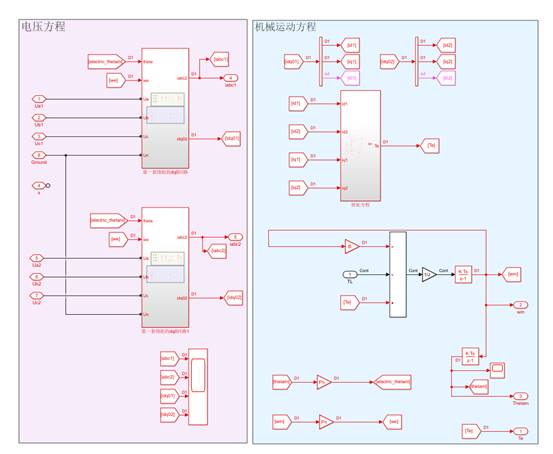
4.3 Simulink建模
知道电机的数学模型,即可根据数学模型搭建simulink模型。搭建的电机本体模型如下:
4.4逆变器调制部分
(1)中性点隔离型——此时不需要考虑零序回路,两套绕组可分别采用SVPWM进行调制。
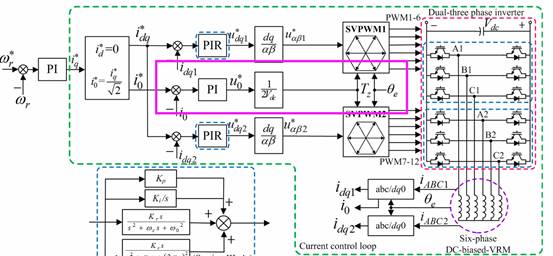
(2)中性点连接型——此时需要考虑零序回路,两套绕组需要根据零序电压参考值进行零序电压的分配,以控制零序电流。类似于下图的紫色方框内容(参考文献[2])。
5. 中性点隔离型对称六相电机的仿真验证
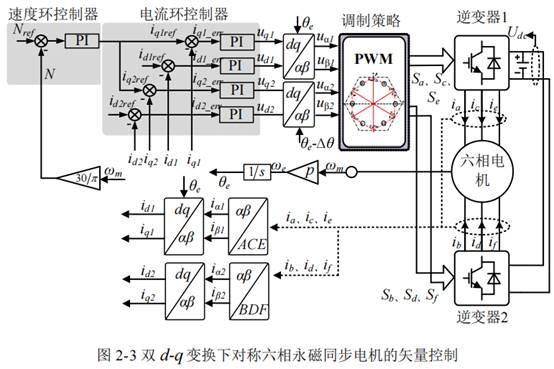
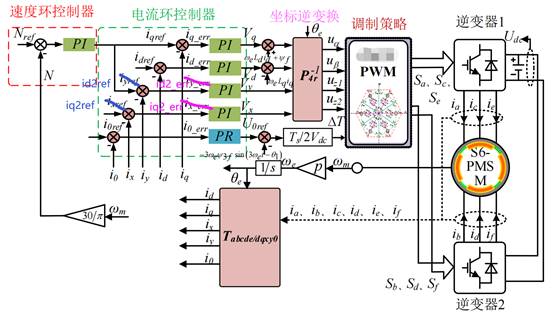
仿真中采用的控制框图如下:
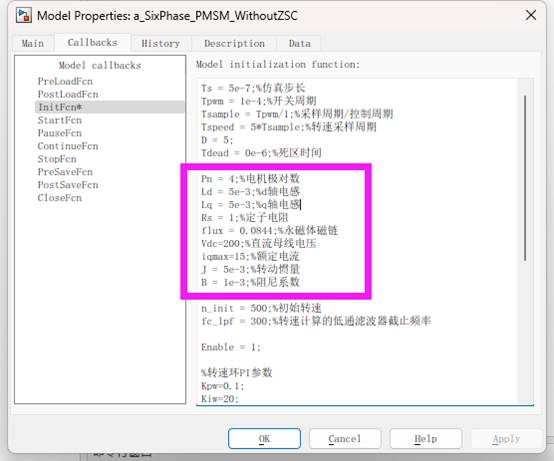
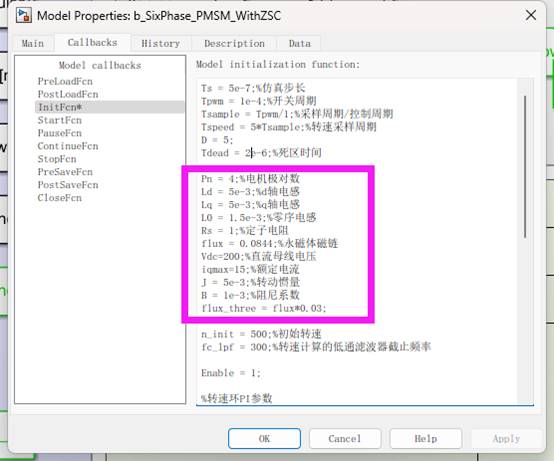
电机参数如下:
仿真工况:初始电机转速为500r/min,0.25s前的参考转速设置为1500r/min,0.25s后设置为600r/min;0.15s前负载为10Nm,0.15s时突加10Nm负载。
5.1无死区情况下的仿真波形
整体仿真波形如下:
放大图如下:
从放大图看出,六相电流之间每相互差60度,符合理论。
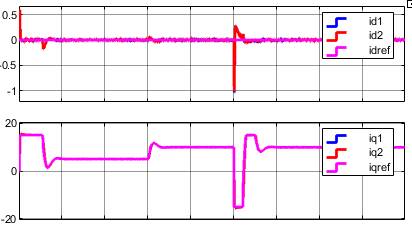
双dq坐标系下的电流跟随情况如下,稳态时能实现id=0控制,且动态过程中iq1和iq2都能有效跟踪参考电流。所以仿真搭建的控制回路没啥问题。
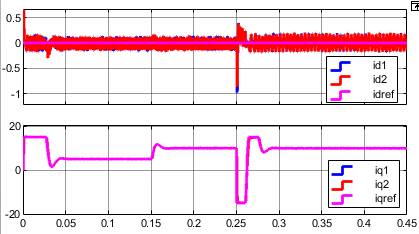
5.2有死区情况下的仿真波形
双dq坐标系下的电流跟随情况如下,d轴电流开始出现明显谐波电流。
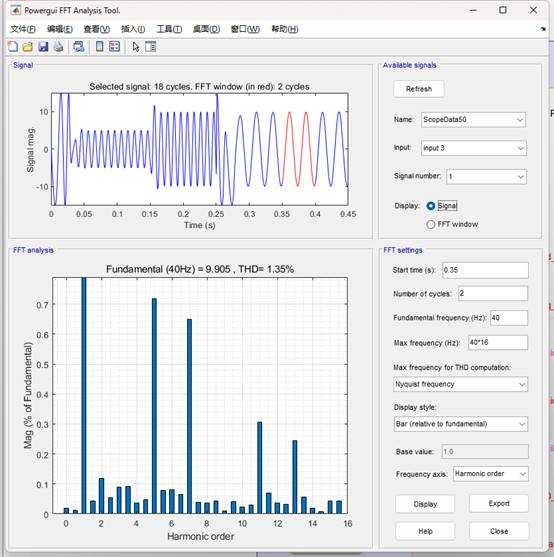
第一套绕组A相电流在600r/min情况下的FFT分析:
第二套绕组A相电流在600r/min情况下的FFT分析:
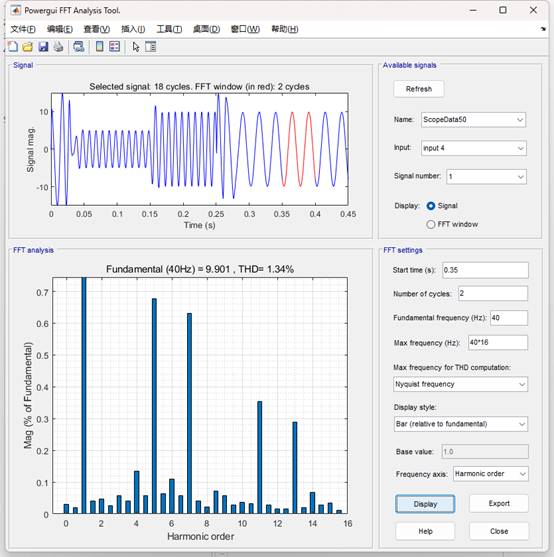
由此可见,两套绕组的相电流都出现了明显的5、7、11、13次谐波电流,说明仿真的死区模块搭建无误。
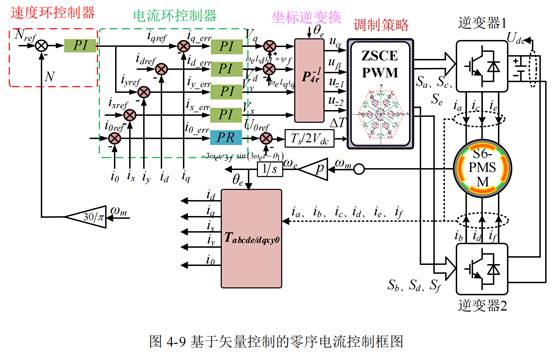
6. 中性点连接型对称六相电机的仿真验证
仿真中采用的控制框图如下:
电机参数如下(三次谐波磁链设置为基波磁链的3%,零序电感设置为1.5mH):
仿真工况:初始电机转速为500r/min,0.25s前的参考转速设置为1500r/min,0.25s后设置为600r/min;0.15s前负载为10Nm,0.15s时突加10Nm负载。
6.1无零序电流闭环控制下的仿真波形
整体仿真波形如下:
放大图如下:
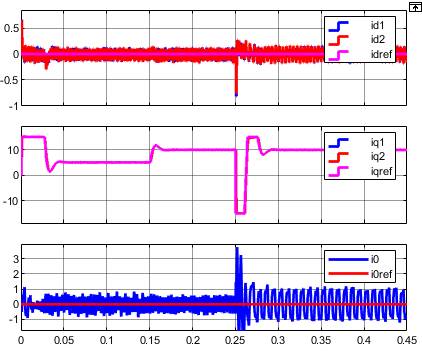
dq0电流的跟随性能:
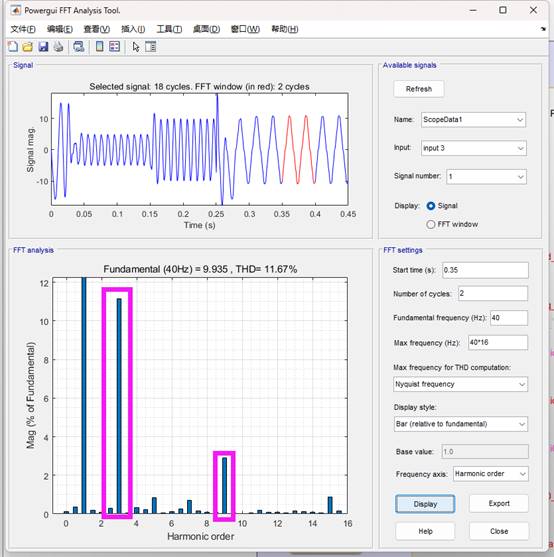
第一套绕组A相电流在600r/min情况下的FFT分析:
第二套绕组A相电流在600r/min情况下的FFT分析:
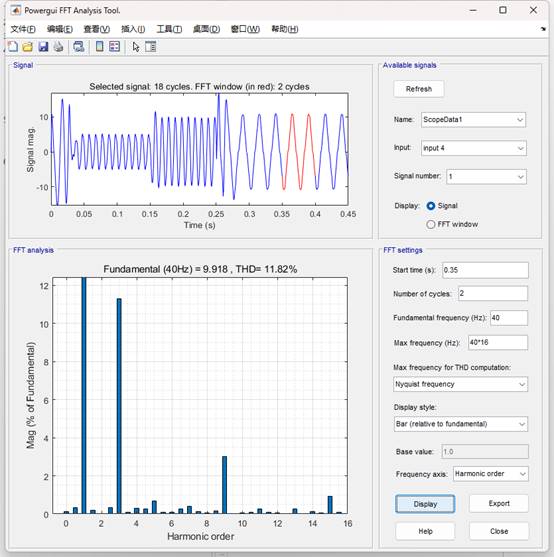
从FFT分析结果来看,无零序闭环的情况下,中性点连接型对称六相电机会出现零序电流,这部分零序电流在相电流中的表现为3次谐波电流、9次谐波电流、15次谐波电流。
对于3次谐波电流,一部分由永磁体三次谐波反电势产生,一部分由逆变器非线性产生;9次谐波电流以及15次谐波电流均由逆变器非线性产生。
此外,如果两套三相绕组均采用传统三相的SVPWM,由于SVPWM相当于在三相正弦参考电压中注入了三角波零序电压,因此零序回路还会存在由SVPWM产生的三次谐波电流和九次谐波电流。
6.2有零序电流闭环控制下的仿真波形
我这里在零序回路加入3、9次谐波的PIR控制,同时在dq轴加入6、12次谐波的PIR控制。
整体仿真波形如下:
放大图如下:
dq0电流的跟随性能:
第一套绕组A相电流在600r/min情况下的FFT分析如下。从FFT分析结果来看,加入零序闭环以及dq电流的谐波抑制后,电流THD由零序电流闭环前的11.67%下降至2.30%,相电流的3、5、7、9、11、13次谐波电流均被有效抑制。
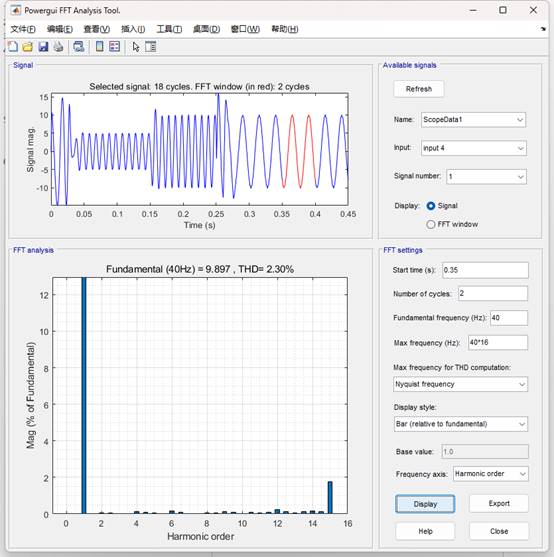
此时电机还有2%左右的15次谐波电流,这是由于逆变器非线性产生的,如果想进一步抑制这部分谐波,可以再加上一个谐振调节器。这里就不再赘述了。
7. 中性点隔离型双三相电机[3]
双三相永磁同步电机的两套绕组的中性点隔离,在空间上相差 30°(刚才的对称六相电机是60°),可以将其看作是两个三相子电机的组合。对每一个三相子电机分别单独的进行坐标变换,可以得到基于双 dq 坐标系的双三相永磁同步电机数学模型:
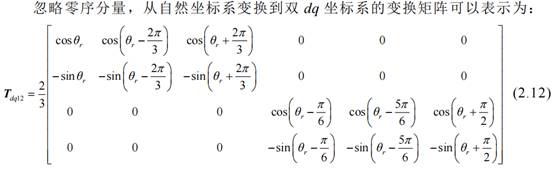
在前面的基础上已经搭建了六相电机,仅需要把电机本体的角度位移30度即可得到双三相电机。
中性点隔离型双三相电机的整体波形
中性点隔离型双三相电机的整体波形(放大图)
可以看到,两套绕组的三相电流是互差30°,符合理论要求。
中性点隔离型双三相电机的dq电流跟随情况
从dq电流跟随情况可以看出,dq电流都可以有效跟随参考电流,所以搭建的控制回路无误。
对于中性点连接型对称双三相电机,也可以参照中性点连接型对称六相电机进行搭建。这里不再赘述。
8. 总结
本篇文章展示了中性点隔离型以及连接型对称六相/双三相PMSM的数学模型以及仿真结果。后续再学习VSD,看看VSD和双dq有什么区别。


)


)


详解)
在AI中的应用)


![[学习]C语言指针函数与函数指针详解(代码示例)](http://pic.xiahunao.cn/[学习]C语言指针函数与函数指针详解(代码示例))



 out of order)
-资源映射)
Java/python/JavaScript/C/C++/GO最佳实现)
)