Floyd弗洛伊德
膜拜大佬,给大佬鞠躬鞠躬鞠躬。。。。。。。。。
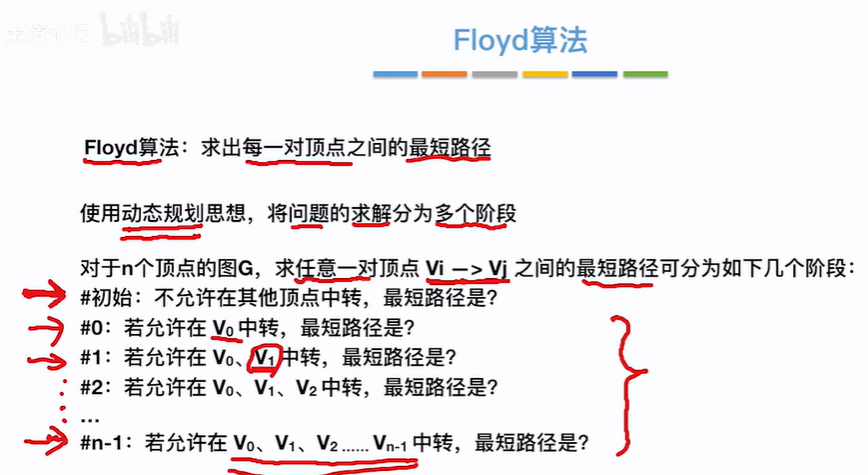
Floyd算法 ----解决顶点间的最短路径:
过程:
如下:
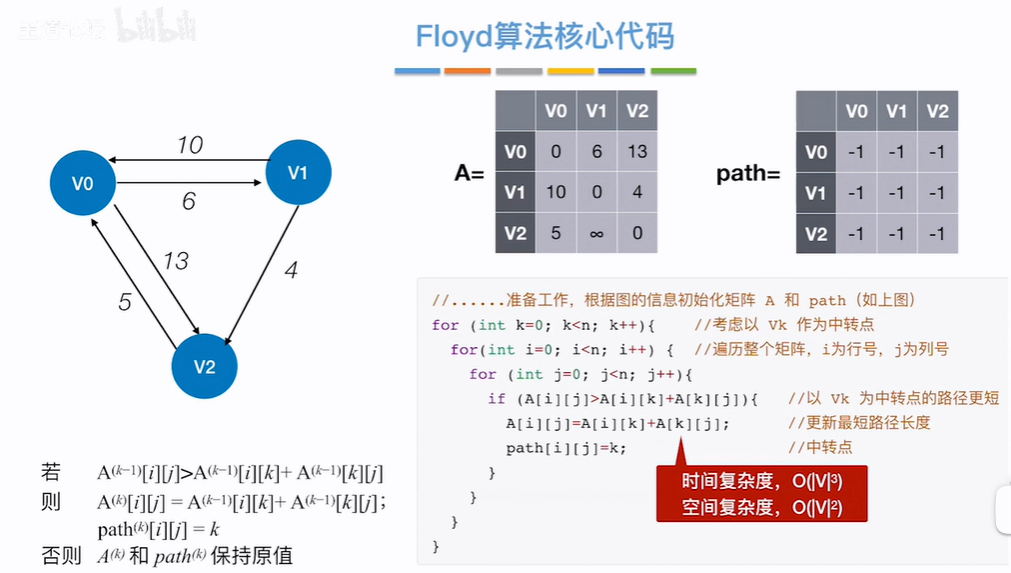
初始化(没有中转点):2个邻接矩阵A和path,第一个是没有中转点的2个顶点之间的最短路径(注意是2个顶点之间的直接路径,中间没有经过其他顶点,如果2个顶点比如A->B没有直接路径,A->C->B有路径,此时也写∞),第2个是目前能找到的最短路径中2个顶点之间的中转点,刚开始没有中转点所以各2个顶点之间的中转点都设为-1
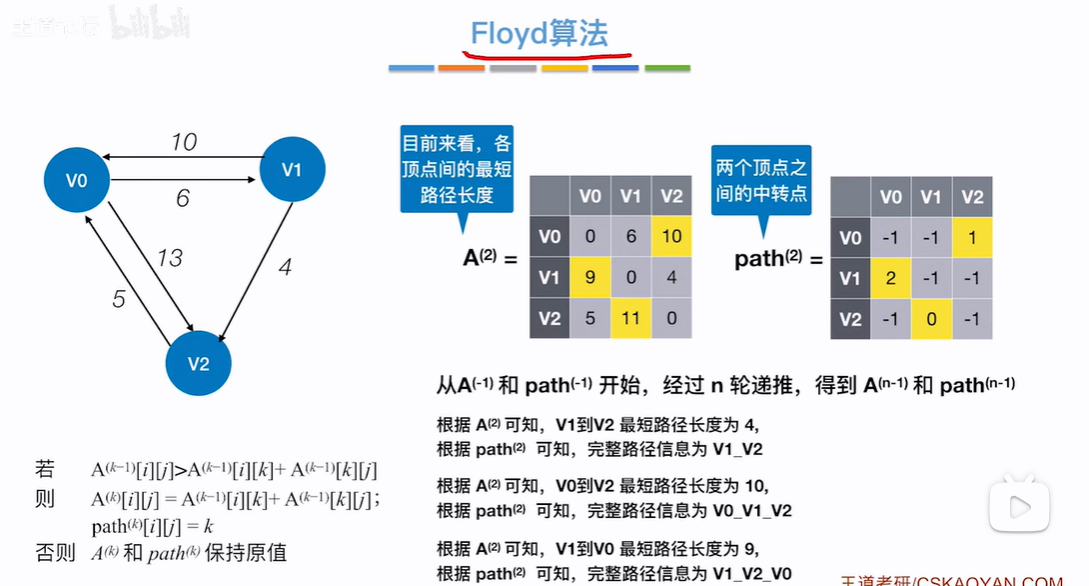
中转点加入V0顶点:在没有加入V0中转点时,A[2][1]即V2->V1路径长度根据A邻接矩阵知是∞,加入V0后即K=0,可以V2->V0,V0->V1,即A[2][0]+A[0][1]=5+6=11(根据A第一个邻接矩阵得出)得出加了中转点后V2->V1最短路径由∞变为11,则修改A[2][1]即第一个邻接矩阵V2->V1最短路径为11,修改第二个邻接矩阵V2->V1中转点为0,所有的顶点都需要加入以上判断,然后修改A和Path,目前看只有V2、V1顶点需要(A(0)[2][1]=11即加入了0号中转点的V2->V1的最短路径长度为11,path(0)[2][1]=0,即当前的V2->V1最短路径长度加入了0号中转点,每次都要判断未加入中转点的最小路径长度>加入了中转点之后的最小路径长度,只有满足这个式子才会修改A和Path)
中转点加入V1顶点:在没有加入V1中转点时,V0->V2路径长度是13,加入后V0->V1->V2即6+4=10,加入后值小满足规则条件A(0)[0][2]>A[0][0][1]+A(1)[1][2],修改A(1)[0][2]=10,path(1)[0][2]=1,其他顶点无需更改,加入中转点后路径没有变化
中转点加入V2顶点:在没有加入V2中转点时,V1->V0路径长度是10,加入后V1->V2->V0即4+5=9,加入后值小满足规则条件A(1)[1][2]>A(1)[1][2]+A(1)[2][0],修改A(2)[1][0]=9,path(2)[1][0]=2
path写的是中转点,把谁加入了中转点对应的path路径上的值就写谁,A写的是最短路径长度
经过n(顶点个数)轮中转之后得到A(n-1)path(n-1)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
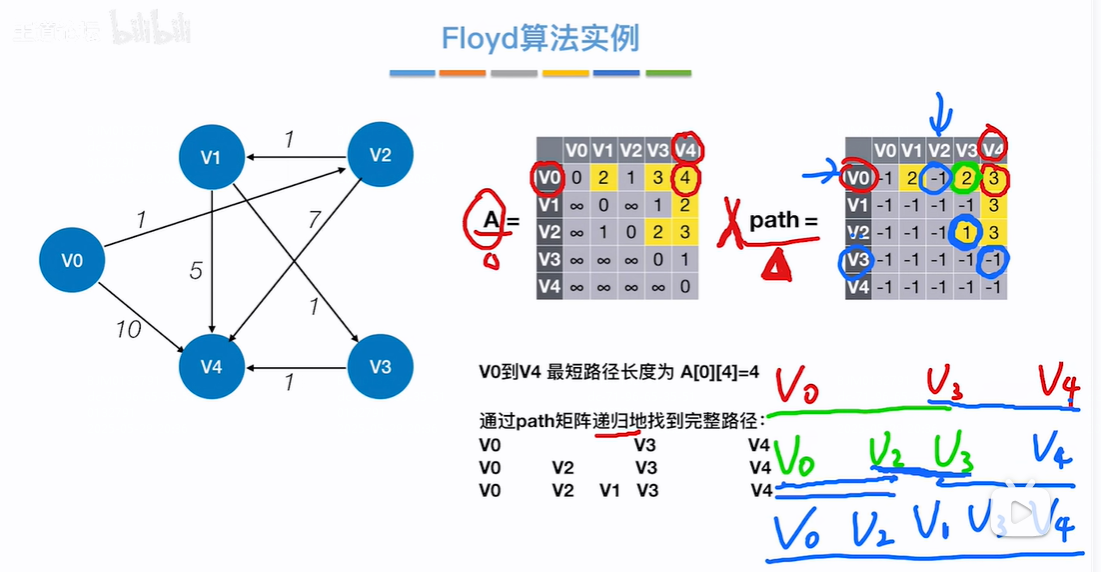
如下:由A(n-1)即A(2)得,V1->V2最短路径是4,由path(2)得V1->V2是-1,即V1->V2最短路径4没有经过中转点,即为V1->V2,V0->V2最短路径是10,由path(2)得V1->V2是1,即V0->V2最短路径10经过中转点1,即为V0->V1->V2即V0_V1_V2
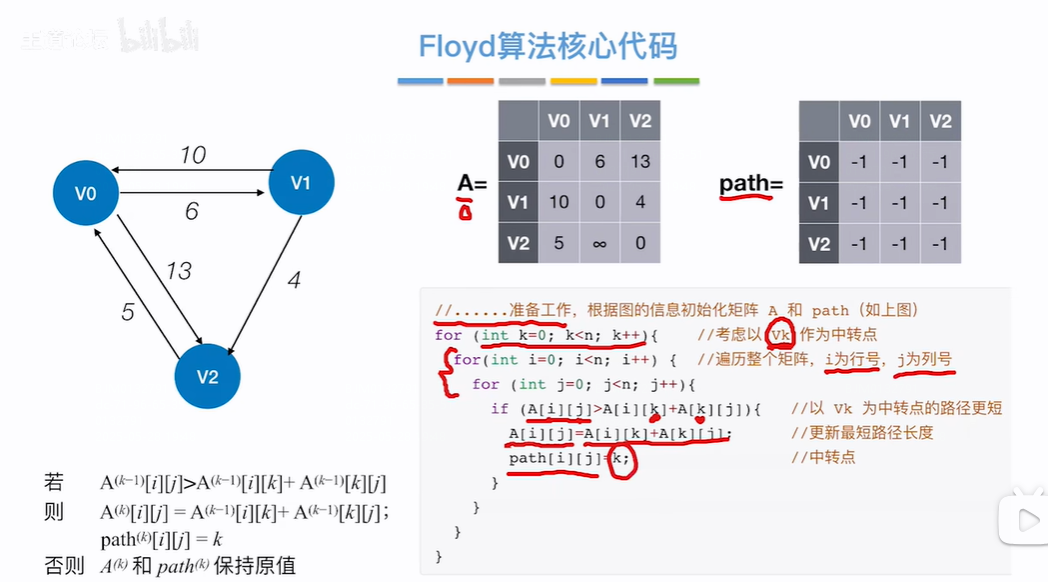
代码如下:
准备一个图的邻接矩阵A+path矩阵初始值都设为-1,开始每循环一次增加一个中转点,每增加一个中转点遍历一次A邻接矩阵(遍历行和列),看加了中转点之后的路径长度和不加谁小,如果加了小更新邻接矩阵A最短路径长度和path中转点
时间复杂度:要根据顶点个数遍历3次即O(|V³|)
空间复杂度:矩阵的存储空间行和列即O(|V²|)
5个顶点例子:
中转点V0:没有需要更新的
中转点V1:既然是V1作为中间点出现,那必然要找指向V1的点作为起点V2和从V1指出的点(此时不要直接看图,要看邻接矩阵)V3、V4,可得V1作为中间点、V2作为起点有2条路径,V2->V1->V3=1+1=2,但是V2->V3没有直接路径即∞,修改A(1)[2][3]=2,path(1)[2][3]=1,另一条V2->V1->V4=1+5=6,V2直接到V4=7,则修改A(1)[2][4]=6,path(1)[2][4]=1【修改对应path上的横纵坐标确定的值为1】
中转点V2:既然是V2作为中间点出现,那必然要找指向V2的点作为起点V0和从V2指出的点(直接看邻接矩A中V2作为横坐标V2所在行有值的点,不要看图!!!)即V1、V3(V2->V3在图中并没有直接指向,但是在邻接矩阵A中(2,3)=2,是因为上一步已经加入了中转点V1,V2->V3没有直接路径,但是可以V2->V1->V3=2有中转点路径,即在使用中转点V2时也使用了中转点V1的结果,在已经有了一个中转点的情况下,计算某2个顶点最短路径时也要看邻接矩阵而不是看图上边的权值!!!)、V4,可得V2作为中间点、V0作为起点有3条路径,V0->V2->V1=1+1=2(邻接矩阵中V0->V2是1,V2->V1是1) <V0->V1是∞,修改A(2)[0][1]=2,path(2)[0][1]=2,另一条V0->V2->V4=1+6=8(注意不要看图上的权值,看邻接矩阵中的最短路径!!!否则就变成了1+7=8,邻接矩阵A上V0->V2=1,V2->V4=6即1+6=7),V0直接到V4=10,则修改A(2)[0][4]=8,path(2)[0][4]=2,另一条V0->V2->V3=1+2=3(邻接矩阵A上V0->V2=1,V2->V3=2即1+2=3) < V0->V3=∞,则修改A(2)[0][3]=3,path(2)[0][3]=2【修改对应path上的横纵坐标确定的值为2】
中转点V3:上同
中转点V4:上同
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
根据最终中转矩阵找路径:
如下为最终中转的A和path,找V0->V4路径,由A知V0->V4最短路径为4,由path知V0->V4中转点是3,再由A知V3->V4最短路径1,由path知V3->V4=-1即V3和V4之间没有中转点,再看V0->V3,由A知V0->V3最短路径3,由path知V0->V3=2级V0->V3中转点V2,即V0->V2->V3,看V0->V2,由A知V0->V2最短路径1,由path知V0->V2=-1即V0->V2没有中转点,再看V2->V3,由A知V2->V3最短路径2,由path知V2->V3=1即V2->V3有中转点V1,即V2->V1->V3,看V2->V1,由A知V2->V1最短路径1,由path知V2->V1=-1即V2->V1没有中转点,再看V1->V3,由A知V1->V3最短路径1,由path知V1->V3=-1即V1->V3没有中转点
V0->V3->V4 第一轮 V3->V4不动路径为1,看V0->V3有哪些中转点
V0->V2->V3->V4第二轮 V0->V2不动路径1、V3->V4不动路径1,看V2->V3有哪些中转点
V0->V2->V1->V3->V4第三轮 V0->V2、V2->V1、V1->V3、V3->V4不动路径1,各路径无中转点
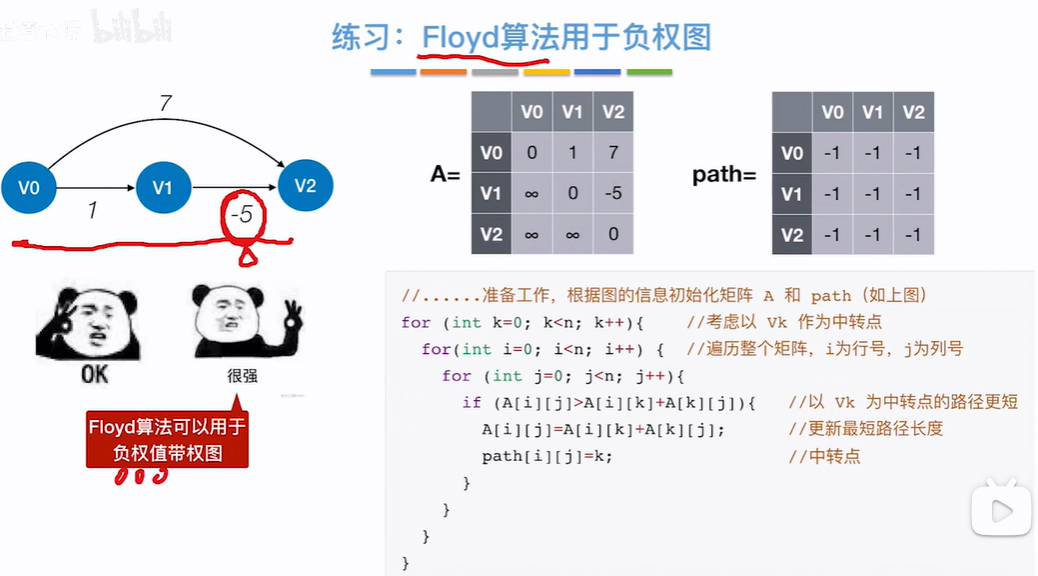
练习:
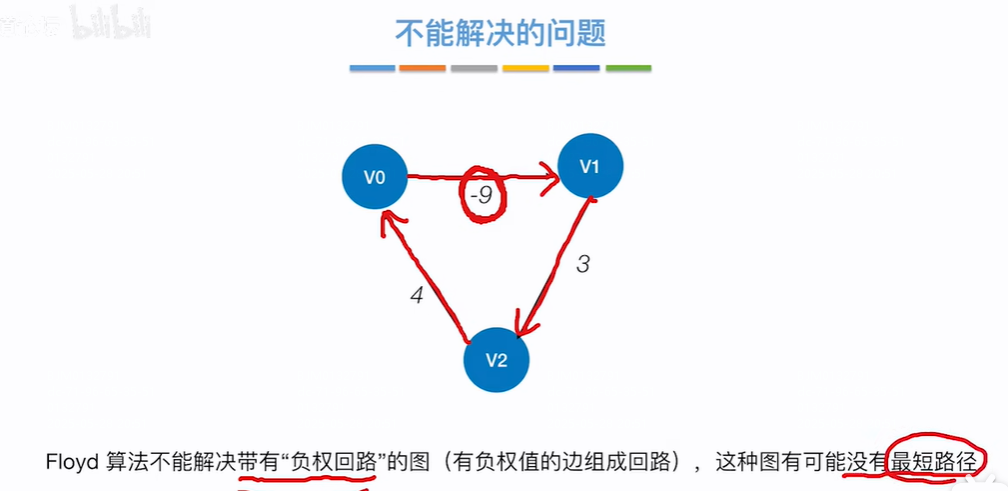
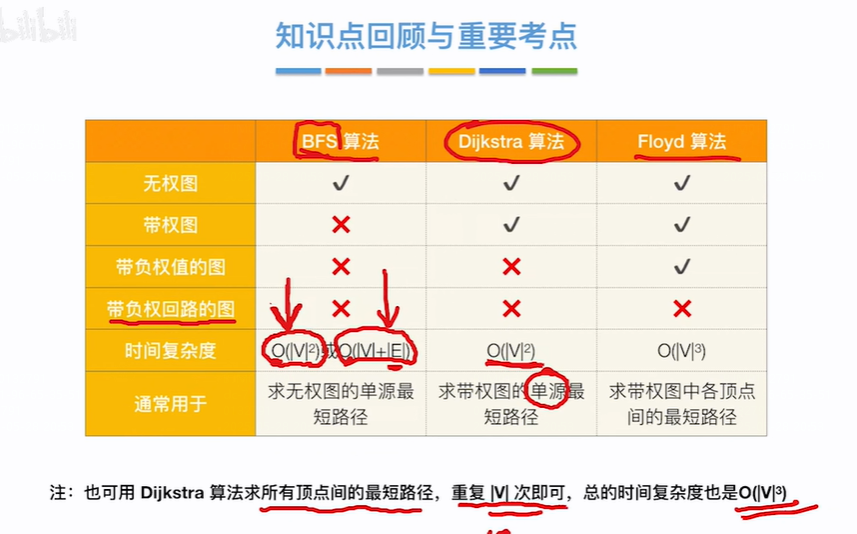
弗洛伊德算法可解决带负权值,但不能解决带回路的负权值
知识回顾:
下次再见

依巴谷星表中的毕星团求解全过程文档及程序)

















