一、进程相关概念
1.什么是进程
程序:静态的,编译好的可执行文件,存放在磁盘中的指令和数据的集合
进程:动态的,是程序的一次执行过程,是独立的可调度的任务
2.进程的特点
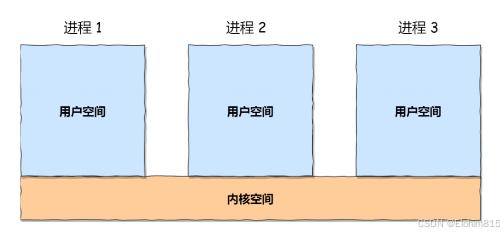
(1)对32位系统,系统会为每个进程分配0~4G的虚拟空间,其中,0~3G(用户空间)是每个进程独有的,3~4G(内核空间)是所有进程共有
进程间通信:通过内核空间
(2) CPU调度进程时会给进程分配时间片(几毫秒~十几毫秒),当时间片用完后,cpu再进行其他进程的调度,实现进程的轮转,从而实现多任务的操作。(没有外界干预的情况下怎么调度进程是CPU随机分配的 )
(3)进程控制块task_struct(了解)
● 进程控制块pcb:包含描述进程的相关信息
● 进程标识PID:唯一的标识一个进程
主要进程标识:
进程号(PID: Process Identity Number)
父进程号:(Parent Process ID: PPID)
● 进程用户
● 进程状态、优先级
● 文件描述符(记录当前进程打开的文件)
3.进程段
Linux中的进程大致包含三个段:
数据段:存放的是全局变量、常数以及动态数据分配的数据空间(如malloc函数取得的空间)等。
正文段:存放的是程序中的代码
堆栈段:存放的是函数的返回地址、函数的参数以及程序中的局部变量 (类比内存的栈区)
4.进程分类
交互进程:该类进程是由shell控制和运行的。交互进程既可以在前台运行,也可以在后台运行。 该类进程经常与用户进行交互,需要等待用户的输入,当接收到用户的输入后,该类 进程会立刻响应,典型的交互式进程有:shell命令进程、文本编辑器等
批处理进程:该类进程不属于某个终端,它被提交到一个队列中以便顺序执行。
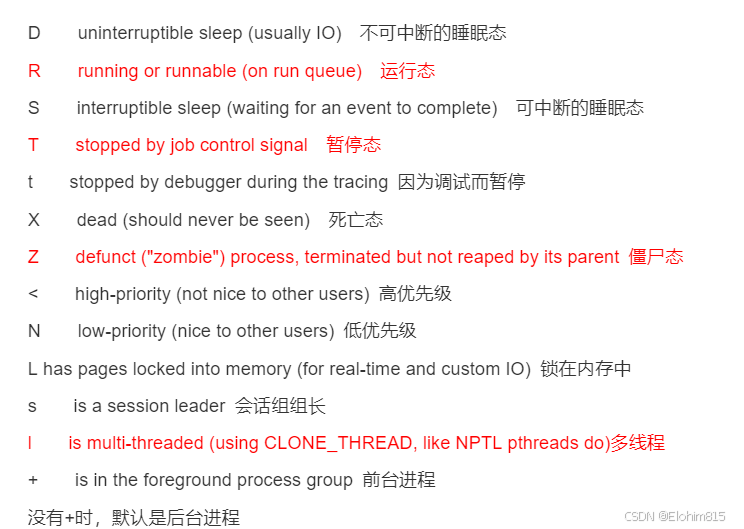
5.进程状态
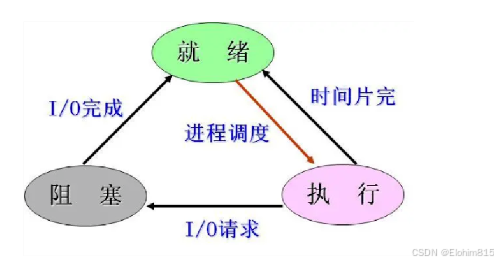
6. 进程状态切换
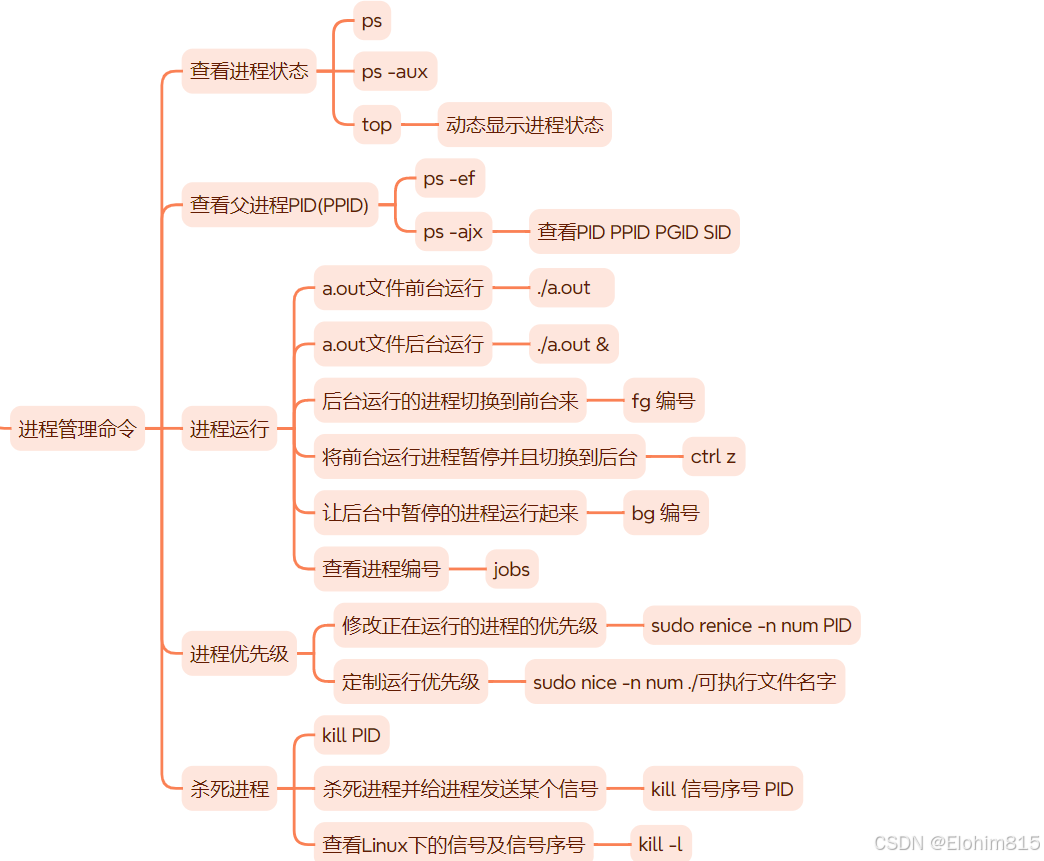
7.进程相关命令
补充:根据进程的优先级进行调度,优先级高的进程先执行。
两种类型:
1. 非剥夺式(非抢占式)优先级调度算法。当一个进程正在处理上运行时,即使有某个更为重要或紧迫的进程进入就绪队列,仍然让正在进行的进程继续运行,直到由于其自身原因而主动让出处理机(任务完成或等待事件),才把处理机分配给更为重要或紧迫的进程。
2. 剥夺式(抢占式)优先级调度算法。当一个进程正在处理机上运行时,若有某个更为重要或紧迫的进程进入就绪队列,则立即暂停正在运行的进程,将处理机分配给更重要或紧迫的进程。
二、进程函数接口
1.创建进程 fork()
#include <sys/types.h>#include <unistd.h>/*
功能:创建子进程参数:无返回值: 成功:父进程-->返回子进程进程号子进程-->返回0失败:父进程-->返回-1,并设置errno子进程并未创建*/
pid_t fork(void);

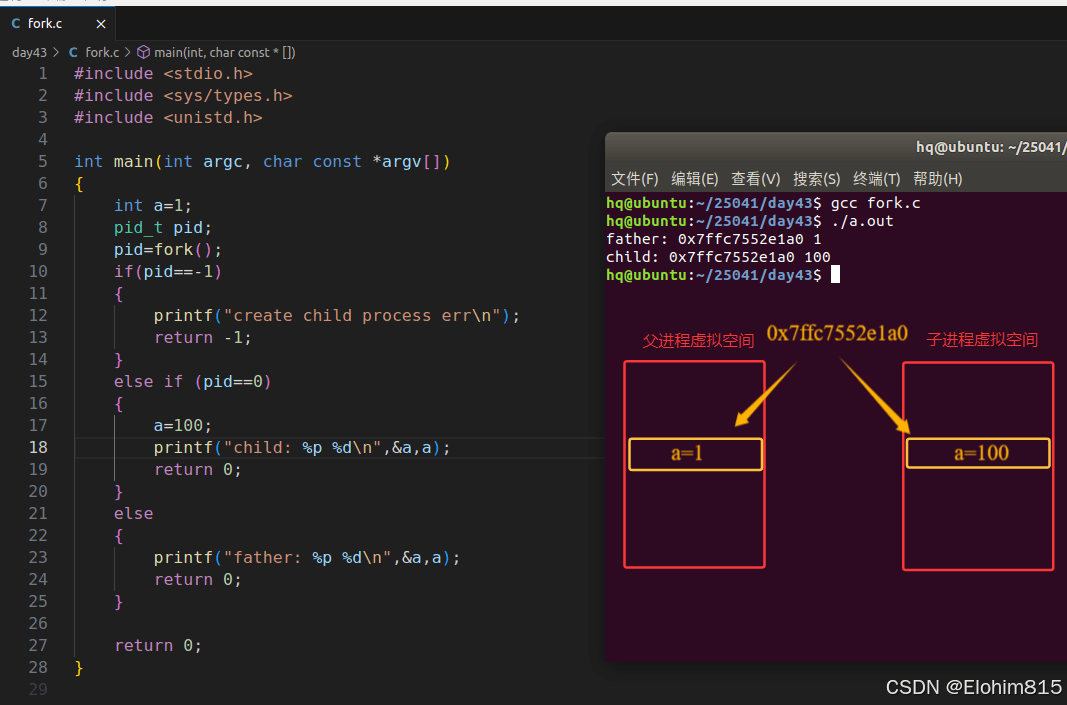
fork函数特点:1)子进程几乎拷贝了父进程的全部内容。包括代码、数据、系统数据段中的pc值、栈中的数据、父进程中打开的文件等;但它们的PID、PPID是不同的。
2)父子进程有独立的地址空间,互不影响;当在相应的进程中改变全局变量、静态变量,都互不影响。
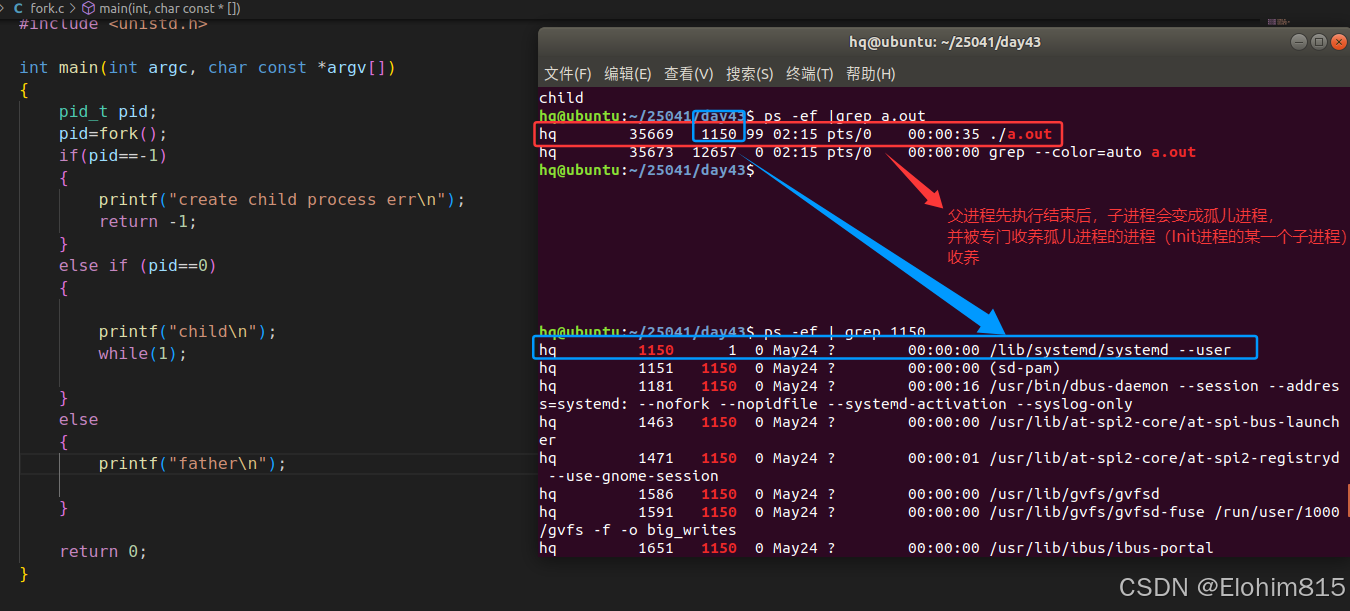
3)若父进程先结束,子进程成为孤儿进程,被init进程收养,子进程变成后台进程。
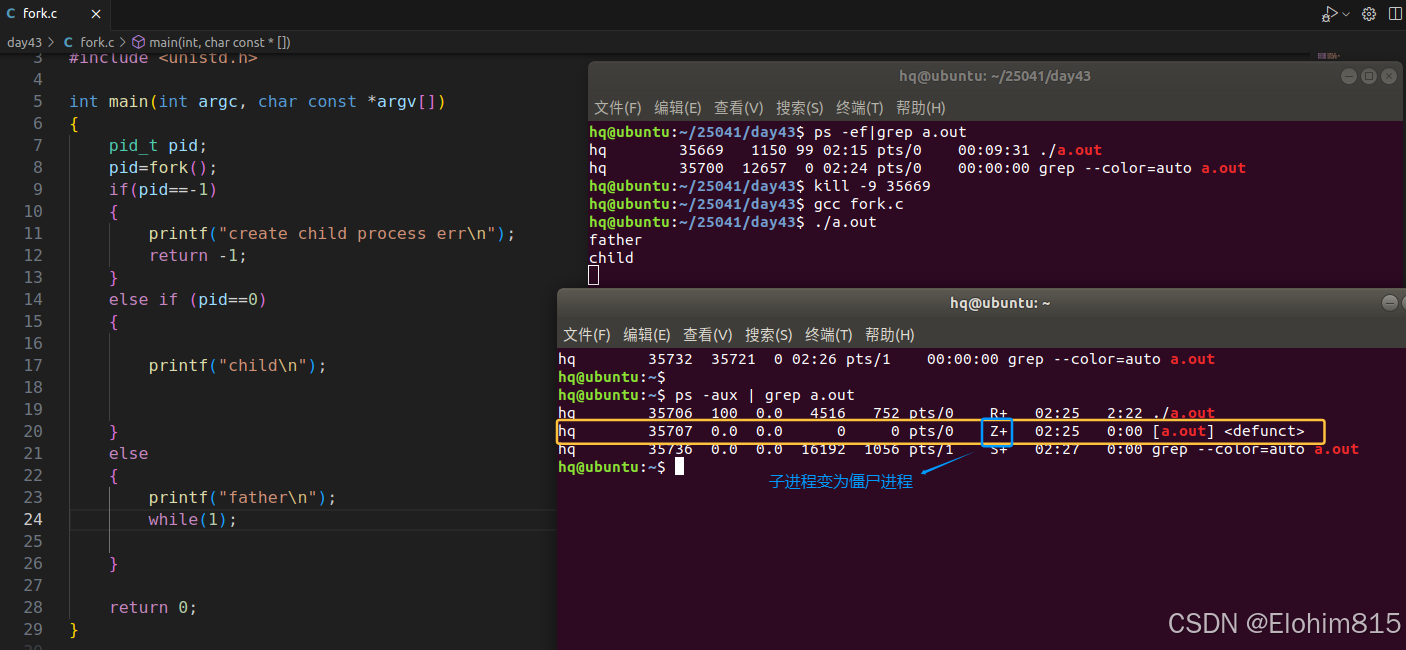
4)若子进程先结束,父进程如果没有及时回收资源,子进程变成僵尸进程(要避免僵尸进程产生)

2.回收资源wait()
#include <sys/types.h>#include <sys/wait.h>/*
功能:回收进程资源(是一个阻塞函数)参数:子进程的退出状态,不接受子进程状态的话就将参数设为NULL返回值:成功 ---> 返回子进程的进程号失败--->返回-1*/pid_t wait(int *wstatus);#include <sys/types.h>
#include <sys/wait.h>/*
功能:回收进程资源(是一个阻塞函数)参数: pid:>0 指定某一个子进程=-1 任意子进程=0 等待其组ID等于调用进程的组ID的任一子进程<-1 等待其组ID等于pid的绝对值的任一子进程status:子进程退出状态options:0 阻塞 WNOHANG 非阻塞返回值: 成功:当options的值设置成 0时:返回结束的子进程的进程号当options的值设置成WNOHANG时若此时子进程已经结束,返回结束的子进程的进程号若此时子进程已经结束,返回 0失败:返回-1*/pid_t waitpid(pid_t pid, int *wstatus, int options);wait(NULL) <==> wait(-1,NULL,0)
3.结束进程exit()
参数:status是一个整型的参数,可以利用这个参数传递进程结束时的状态。通常0表示正常结束;
其他的数值表示出现了错误,进程非正常结束#include <stdlib.h>
void exit(int status);
功能:结束进程,刷新缓存#include <unistd.h>
void _exit(int status);
功能:结束进程,不刷新缓存
常用:exit(0)
4.获取进程号getpid()
#include <sys/types.h>#include <unistd.h>pid_t getpid(void);
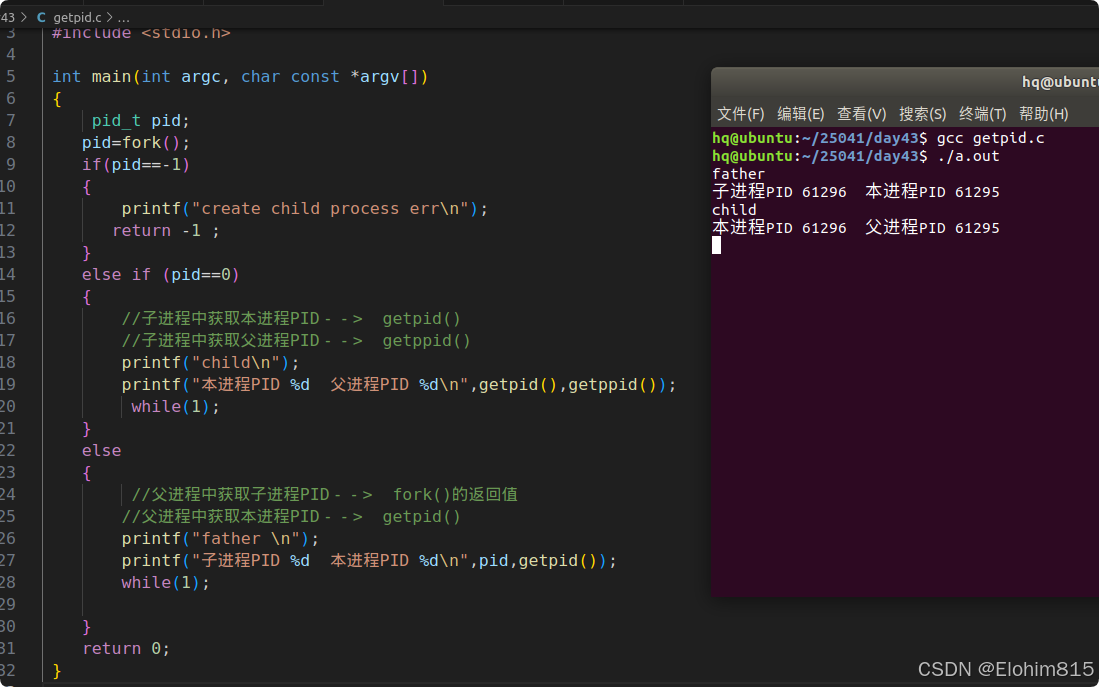
功能:获取当前进程的进程号
pid_t getppid(void);
功能:获取当前进程的父进程号在父进程中获取子进程的PID :通过fork()的返回值
三、进程间通信 (IPC)
1.通信方式介绍:
- 早期的进程间通信:无名管道(pipe) 有名管道(fifo)信号(signal)
- system V IPC: 共享内存 (share memory) 消息队列(message queue) 信号集(semaphore set)
- BSD: 套接字(socket)
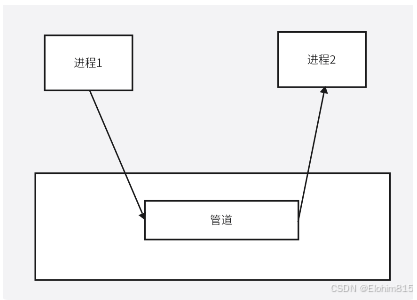
2.无名管道
特点:
(1) 只能用于具有亲缘关系的进程之间的通信
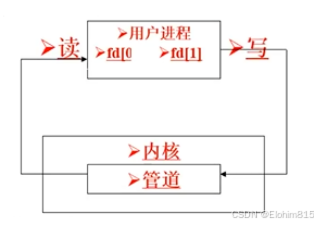
(2) 半双工的通信模式,具有固定的读端fd[0]和写端fd[1]。
(3) 无名管道可以看成是一种特殊的文件(实际是找不到这个文件的),对于它的读写可以使用文件IO如read、write函数进行操作。
(4) 管道是基于文件描述符的通信方式。当一个管道建立时,它会创建两个文件描述符 fd[0]和fd[1]。其中fd[0]固定用于读管道,而fd[1]固定用于写管道。
函数接口:
int pipe(int fd[2])
功能:创建无名管道
参数:文件描述符 fd[0]:读端 fd[1]:写端
返回值:成功 0失败 -1
3.有名管道
特点:
1) 有名管道可以使互不相关的两个进程互相通信。
2) 有名管道可以通过路径名来指出,并且在文件系统中可见,但内容存放在内存中。但是读写数据不会存在文件中,而是在管道中,也就是内核空间中。
3) 进程通过文件IO来操作有名管道
4) 不支持如lseek() 操作
5) 有名管道遵循先进先出规则
函数接口:
/*
功能:创健有名管道
参数:filename:有名管道文件名mode:权限
返回值:成功:0失败:-1,并设置errno号*/int mkfifo(const char *filename,mode_t mode);
4.信号
kill -l :查看系统中的信号
kill -num PID :给某个进程发信号
4.1概念:
- 信号是软件层面上对中断机制的一种模拟,是一种异步通信模式。
- 信号可以直接进行用户空间进程和内核进程之间的交互,内核进程也可以利用它来通知用户空间进程发生了哪些系统事件。
- 如果该进程当前并未处于执行态,则该信号就由内核保存起来,直到该进程恢复执行再传递给它;如果一个信号被进程设置为阻塞,则该信号的传递被延迟,直到其阻塞被取消时才被传递给进程。
4.2信号的响应方式
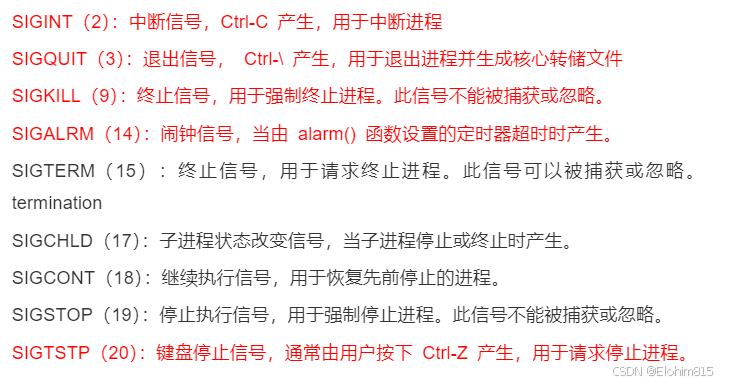
- 忽略信号 :对信号不做任何处理,但是有两个信号不能忽略:即SIGKILL及SIGSTOP。
- 捕捉信号:定义信号处理函数,当信号发生时,执行相应的处理函数
- 执行缺省操作:Linux对每种信号都规定了默认操作
4.3信号种类
4.4函数接口
(1)信号的发送kill()和挂起 pause()
#include <sys/types.h>
#include <signal.h>
/*
功能:信号发送
参数:pid:指定进程sig:要发送的信号
返回值:成功 0 失败 -1*/int kill(pid_t pid, int sig);
#include <signal.h>
/*
功能:进程向自己发送信号
参数:sig:信号
返回值:成功 0 失败 -1*/int raise(int sig);
注意: raise( sig ) <==> kill ( getpid() , sig )
#include <unistd.h>/*功能:用于将调用进程挂起(类似于死循环且不占用CPU资源),直到收到被捕获处理的信号为止。*/
int pause(void);
注意:若程序中有使用signal的捕捉信号自定义函数处理时,pause接收到被捕获处理的信号以后会结束挂起
(2)定时器alarm()
#include <unistd.h>/*
功能:在进程中设置一个定时器。当定时器指定的时间到了时,它就向进程发送SIGALARM信号。
参数:seconds:定时时间,单位为秒
返回值:如果调用此alarm()前,进程中已经设置了闹钟时间,则返回上一个闹钟时间的剩余时间,否则返回0。*/
unsigned int alarm(unsigned int seconds);注意:
1)一个进程只能有一个闹钟时间。如果在调用alarm时已设置过闹钟时间,则之前的闹钟时间被新值所代替。
2)系统默认对SIGALRM(闹钟到点后内核发送的信号)信号的响应: 如果不对SIGALRM信号进行捕捉或采取措施,默认情况下,闹钟响铃时刻会退出进程(程序非正常结束,要注意刷新问题!!)。
3)常用操作:取消定时器alarm(0),返回旧闹钟余下秒数。
4)alarm是非阻塞函数
(3)信号处理函数signal()
#include <signal.h>/*
功能:信号处理函数参数:signum:要处理的信号handler:信号处理方式忽略信号 (SIG_IGN)执行默认操作 (SIG_DFL)捕捉信号并执行自定义操作 (自定义函数名)返回值:成功:设置之前的信号处理方式失败:-1*/sighandler_t signal(int signum, sighandler_t handler);补充:
sighandler_t 是一个 函数指针 的重命名 (该指针指向的函数是一个 无返回值,形参为一个整型的类型函数)typedef void (*sighandler_t)(int);
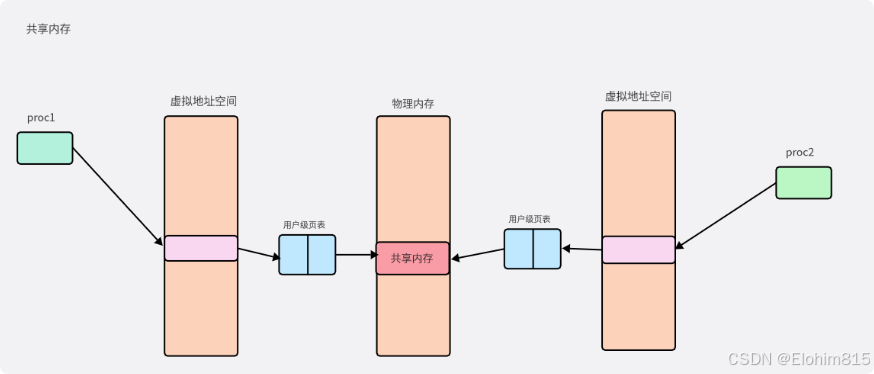
5. 共享内存
5.1特点
1)共享内存是一种最为高效的进程间通信方式,进程可以直接读写内存,而不需要任何数据的拷贝。
2)为了在多个进程间交换信息,内核专门留出了一块内存区,可以由需要访问的进程
将其映射到自己的私有地址空间。进程就可以直接读写这一内存区而不需要进行数据的拷贝,从而大大提高的效率。
3) 由于多个进程共享一段内存,因此也需要依靠某种同步机制,如互斥锁和信号量等
5.2步骤
(1) 创建key值
(2) 创建或打开共享内存
(3) 映射共享内存到用户空间
(4) 撤销映射
(5) 删除共享内存
5.3函数接口
(1)创建key值
使用pathname提供的文件的inode号和字符的ASCII码值通过某种计算方法得到key值
#include <sys/types.h>
#include <sys/ipc.h>
/*
功能:创建出来的具有唯一映射关系的一个key值,帮助操作系统用来标识一块共享内存
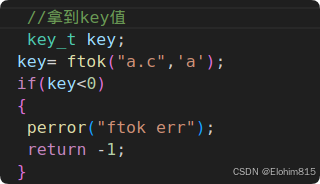
参数:Pathname:已经存在的可访问文件的名字Proj_id:一个字符(因为只用低8位,一个字符正好是8位)返回值:成功:key值失败:-1*/key_t ftok(const char *pathname, int proj_id);(2) 创建或打开共享内存
#include <sys/ipc.h>
#include <sys/shm.h>/*
功能:创建或打开共享内存
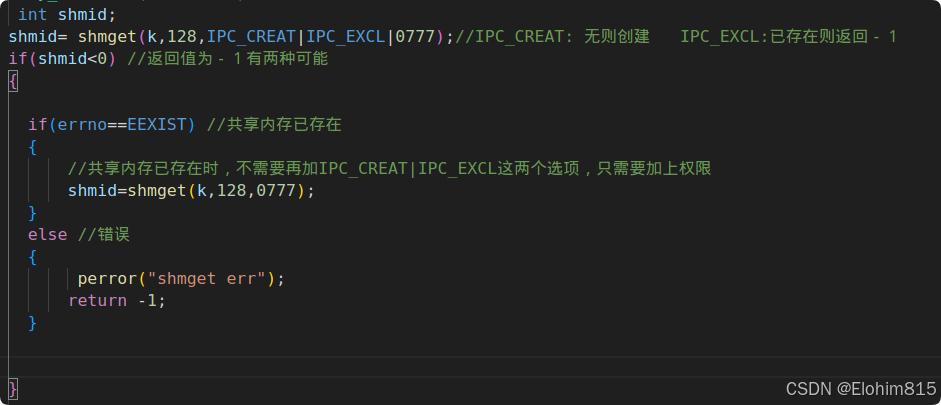
参数:key 键值size 共享内存的大小shmflg IPC_CREAT|IPC_EXCL|0777
返回值:成功 返回共享内存号 shmid出错或共享内存已存在 -1*/int shmget(key_t key, size_t size, int shmflg);
注意:shmget() 出错或共享内存已存在都返回 -1,因此,要在容错判断中在加一次判断,使用系统定义的file exist错误号进行判断

(3) 映射共享内存到用户空间
#include <sys/types.h>
#include <sys/shm.h>/*
功能:映射共享内存,即把指定的共享内存映射到进程的地址空间用于访问
参数:shmid 共享内存的id号shmaddr 一般为NULL,表示由系统自动完成映射如果不为NULL,那么有用户指定shmflg:SHM_RDONLY就是对该共享内存只进行读操作0 可读可写
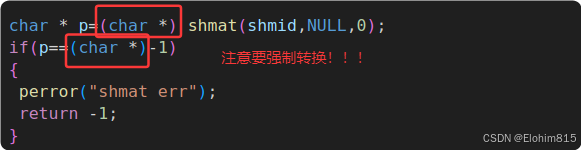
返回值:成功:完成映射后的地址,出错:-1(地址)*/void *shmat(int shmid,const void *shmaddr,int shmflg); 最常使用形式:(强制转换)shmat(shmid,NULL,0);
容错判断:因为shmat()返回的是任意类型的指针,要注意强转
(4) 撤销映射
#include <sys/types.h>
#include <sys/shm.h>
/*
功能:取消映射
参数:要取消的地址
返回值:成功0 失败的-1*/int shmdt(const void *shmaddr);(5) 删除共享内存
使用的是shmctl()函数的删除功能
#include <sys/ipc.h>
#include <sys/shm.h>
/*功能:(删除共享内存),对共享内存进行各种操作
参数:shmid 共享内存的id号cmd IPC_STAT 获得shmid属性信息,存放在第三参数IPC_SET 设置shmid属性信息,要设置的属性放在第三参数IPC_RMID:删除共享内存,此时第三个参数为NULL即可buf shmid所指向的共享内存的地址,空间被释放以后地址就赋值为null
返回:成功0 失败-1*/int shmctl(int shmid,int cmd,struct shmid_ds *buf); 即使用 shmctl(shmid,IPC_RMID,NULL);
5.4 命令
ipcs -m --->查看系统中的共享内存
ipcrm -m shmid --->删除共享内存
注意:可能不能直接删除仍有进程使用的共享内存
(可通过ps -ef查看有哪些进程,kill掉相关进程后再执行操作)
6.信号灯集
6.1特点
信号灯(semaphore),也叫信号量,信号灯集是一个信号灯的集合。它是不同进程间或一个给定进程内部不同线程间同步的机制;
而Posix信号灯指的是单个计数信号灯:无名信号灯、有名信号灯。(咱们学的是无名信号灯)
System V的信号灯是一个或者多个信号灯的一个集合。其中的每一个都是单独的计数信号灯。
通过信号灯集实现共享内存的同步操作
6.2 步骤
(1) 创建key值: ftok
(2) 创建或打开信号灯集: semget
(3) 初始化信号灯: semctl
(4) PV操作: semop
(5) 删除信号灯集: semctl
6.3 命令
ipcs -s
ipcrm -s
6.4 函数接口
int semget(key_t key, int nsems, int semflg);
功能:创建/打开信号灯
参数:key:ftok产生的key值nsems:信号灯集中包含的信号灯数目semflg:信号灯集的访问权限,通常为IPC_CREAT|IPC_EXCL|0666
返回值:成功:信号灯集ID失败:-1int semctl ( int semid, int semnum, int cmd…/*union semun arg*/);
功能:信号灯集合的控制(初始化/删除)
参数:semid:信号灯集IDsemnum: 要操作的集合中的信号灯编号,信号灯编号从0开始cmd: GETVAL:获取信号灯的值,返回值是获得值SETVAL:设置信号灯的值,需要用到第四个参数:共用体IPC_RMID:从系统中删除信号灯集合
返回值:成功 0失败 -1
用法:
1. 初始化信号灯集:
需要自定义共用体
union semun{int val;
} mysemun;
mysemun.val = 10;
semctl(semid, 0, SETVAL, mysemun);2. 获取信号灯值:函数semctl(semid, 0, GETVAL)的返回值
3. 删除信号灯集:semctl(semid, 0, IPC_RMID);int semop ( int semid, struct sembuf *opsptr, size_t nops);
功能:对信号灯集合中的信号量进行PV操作
参数:semid:信号灯集IDopsptr:操作方式nops: 要操作的信号灯的个数 1个
返回值:成功 :0失败:-1
struct sembuf {short sem_num; // 要操作的信号灯的编号short sem_op; // 0 : 等待,直到信号灯的值变成0// 1 : 释放资源,V操作// -1 : 申请资源,P操作 short sem_flg; // 0(阻塞),IPC_NOWAIT, SEM_UNDO
};用法:
申请资源 P操作:mysembuf.sem_num = 0;mysembuf.sem_op = -1;mysembuf.sem_flg = 0;semop(semid, &mysembuf, 1);
释放资源 V操作:mysembuf.sem_num = 0;mysembuf.sem_op = 1;mysembuf.sem_flg = 0;semop(semid, &mysembuf, 1);
7.消息队列
7.1特点
消息队列是IPC对象(活动在内核级别的一种进程间通信的工具)的一种一个消息队列由一个标识符 (即队列号 --> msgid)来标识
消息队列就是一个消息的列表。用户可以在消息队列中添加消息、读取消息等
消息队列可以按照类型(自己设一个值作为类型)来发送/接收消息
7.2 步骤
(1) 创建key值: ftok()
(2) 创建或打开消息队列: msgget()
(3) 添加消息: 按照类型把消息添加到已经打开的消息队列末尾msgsnd()
(4) 读取消息: 可以按照类型把消息从列表中取走 msgrcv()
(5) 删除消息队列msgctl()
7.3 操作命令
ipcs -q: 查看消息队列
ipcrm -q msgid: 删除消息队列
7.4 函数接口
(1) 创建key值: ftok() 同前面的共享内存中的ftok函数
(2) 创建或打开消息队列: msgget()
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/msg.h>/*
功能:创建或打开一个消息队列
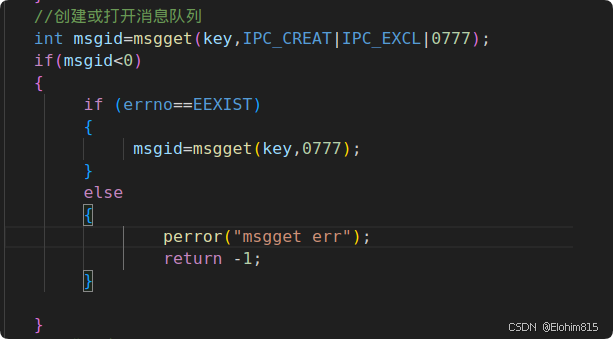
参数: key值flag:创建消息队列的权限IPC_CREAT|IPC_EXCL|0666
返回值:成功:msgid失败:-1*/int msgget(key_t key, int flag);
注意:有时候可能会创建失败或者migid==0,因此创建完后都要用 ipcs -q 命令查看,若是则要用 ipcrm -q msgid 命令删除已建队列然后重新进行创建。
(3) 添加消息: 按照类型把消息添加到已经打开的消息队列末尾msgsnd()
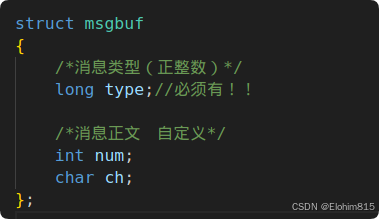
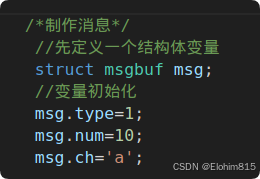
常用的消息结构: 制作消息
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/msg.h>/*
功能:添加消息
参数:msqid:消息队列的IDmsgp:指向消息的指针。常用消息结构msgbuf如下:struct msgbuf{long mtype; //消息类型char mtext[N]}; //消息正文size:发送的消息正文的字节数flag:IPC_NOWAIT消息没有发送完成函数也会立即返回 0:直到发送完成函数才返回 (阻塞等待)
返回值:成功:0失败:-1*/int msgsnd(int msqid, const void *msgp, size_t msgsz, int msgflg);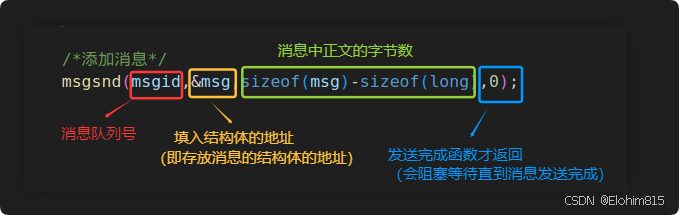
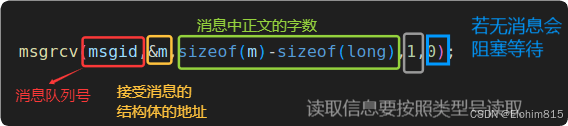
(4) 读取消息: 可以按照类型把消息从列表中取走 msgrcv()
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/msg.h>/*
功能:读取消息
参数:msgid:消息队列的IDmsgp:存放读取消息的空间size:接受的消息正文的字节数(sizeof(msgp)-sizeof(long))msgtype:0:接收消息队列中第一个消息。大于0:接收消息队列中第一个类型为msgtyp的消息.小于0:接收消息队列中类型值不小于msgtyp的绝对值且类型值又最小的消息。flag:0:若无消息函数会一直阻塞IPC_NOWAIT:若没有消息,进程会立即返回ENOMSG返回值:成功:接收到的消息的长度失败:-1*/ssize_t msgrcv(int msqid, void *msgp, size_t msgsz, long msgtyp,int msgflg);
(5) 删除消息队列msgctl()
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/msg.h>/*
功能:对消息队列的操作,删除消息队列
参数:msqid:消息队列的队列IDcmd:IPC_STAT:读取消息队列的属性,并将其保存在buf指向的缓冲区中。IPC_SET:设置消息队列的属性。这个值取自buf参数。IPC_RMID:从系统中删除消息队列。buf:消息队列缓冲区
返回值:成功:0失败:-1
*/int msgctl ( int msgqid, int cmd, struct msqid_ds *buf );用法:msgctl(msgid, IPC_RMID, NULL)
)

 问题 D: 数列-训练套题T10T3)







》—— 零基础实现基于离散优化的避障路径规划)






--XSS漏洞利用全过程)
)
)