目录
- 1.摘要
- 2.麻雀搜索算法SSA原理
- 3.整体框架
- 4.改进SSA算法
- 5.结果展示
- 6.参考文献
- 7.代码获取
- 8.读者交流
1.摘要
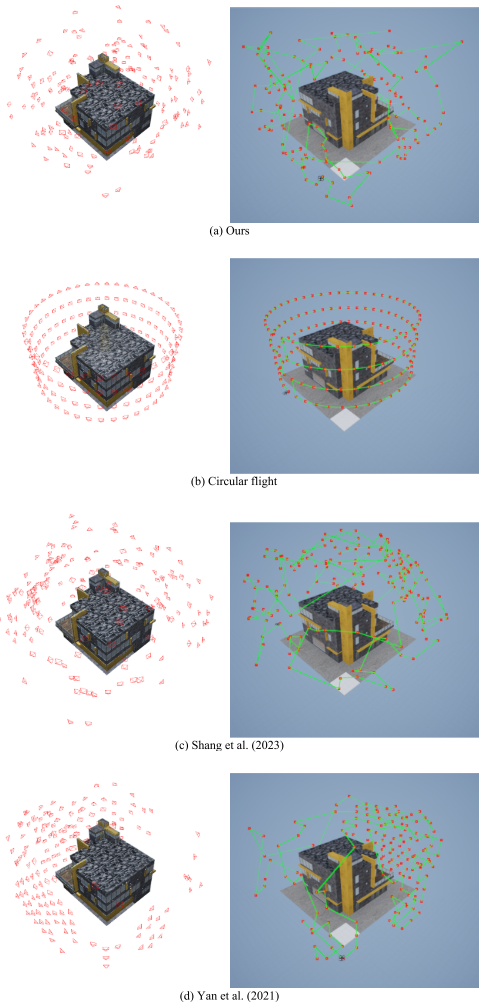
对现有建筑进行高质量的三维重建对于其维护、修复和管理至关重要。图像采集中的有效视角规划会显著影响基于摄影测量的三维重建质量。复杂的建筑结构常常导致传统视角规划方法下的区域采样不足,而过多的视角又会显著增加计算资源和数据采集的负担。为了解决这些问题,本文提出了一种新的先探索、后开发的视角规划策略,以在尽可能少的视角下实现高质量的建筑重建。在探索阶段,通过对图像和粗模型的语义与几何分析,识别出无人机禁飞区域与建筑关注区域。随后结合建筑关注区域和重建相关因素(包括距离、入射角、视差角和图像重叠度),构建了一个优化适应度函数。本文提出了一种改进麻雀搜索算法(MSSA),在优化机制上进行了增强,并融合了视角规划的物理模型,从而能够有效生成最优的视角集合。在开发阶段设计了无碰撞的最短飞行路径,使无人机能够采集图像并完成高质量的三维模型重建。
2.麻雀搜索算法SSA原理
【智能算法】麻雀搜索算法(SSA)原理及实现
3.整体框架
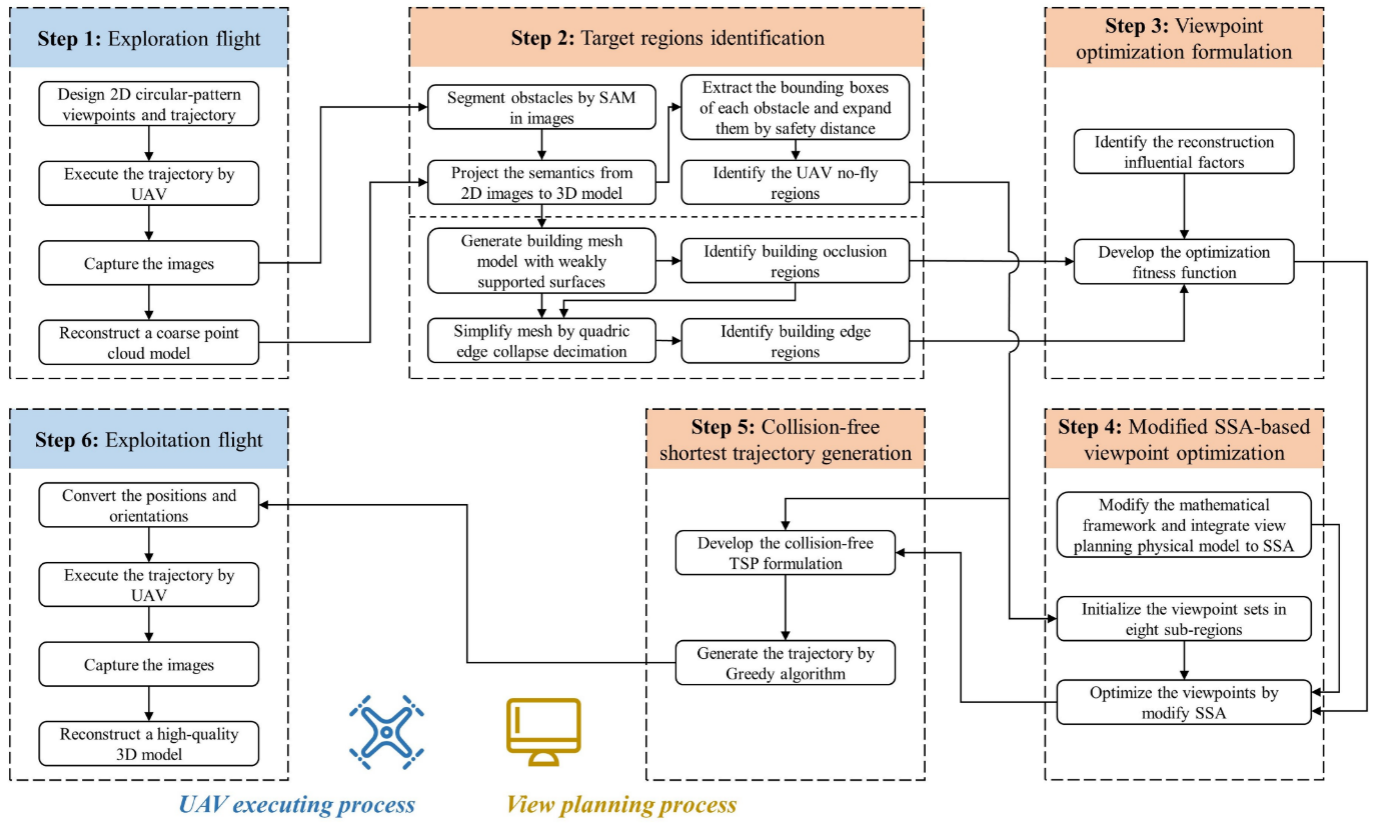
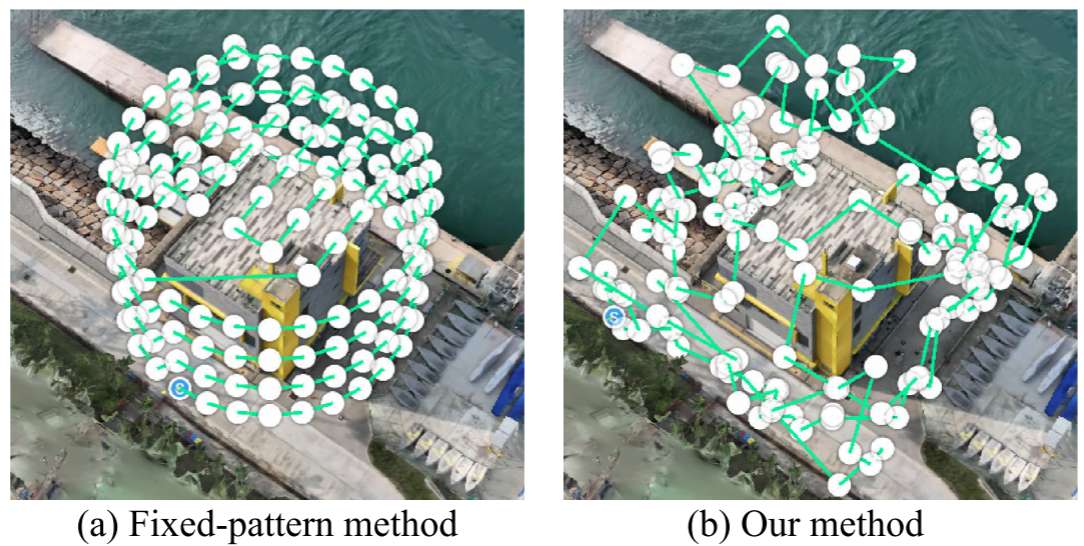
本文提出了一种优化的探索—开发无人机视角规划策略,用来实现高质量的建筑三维重建。整个过程首先通过初步的环绕飞行采集图像并构建粗略模型,在此基础上,通过语义分析与几何建模识别出建筑的关键关注区域与无人机禁飞区域,进而指导后续的精细规划。在视角优化方面,本文构建了一个融合多种重建影响因素(包括距离、入射角、视差角和图像重叠度)以及建筑关注区域的适应度函数,并引入了改进麻雀搜索算法(MSSA),用在连续可飞行空间中直接优化无人机视角的位置与朝向。此外,研究还设计了一种无碰撞的最短路径规划方法,确保无人机在执行任务时能够高效、安全地穿越各个视角点。最后,通过执行优化后的第二次飞行,完成图像采集并生成高质量的三维重建模型。
4.改进SSA算法
改进SSA融合视角规划的物理模型,增强对初始视角分布的均匀性与多样性控制,将优化过程划分为全局探索与局部开发两个阶段,并设置动态可调的更新机制与角色比例。此外引入大小步长结合的局部开发策略,并取消仅接受更优解的限制,从而提高算法跳出局部最优的能力。算法以多个视角集合为优化对象,每个集合包含若干视角点,每个视角由位置与目标方向两个三维坐标构成。为实现初始视角的空间均匀分布,无人机可飞行区域被划分为多个子区域,每个区域内随机生成等量的视角点,同时其目标方向则在建筑物的三维包围盒中随机设定。
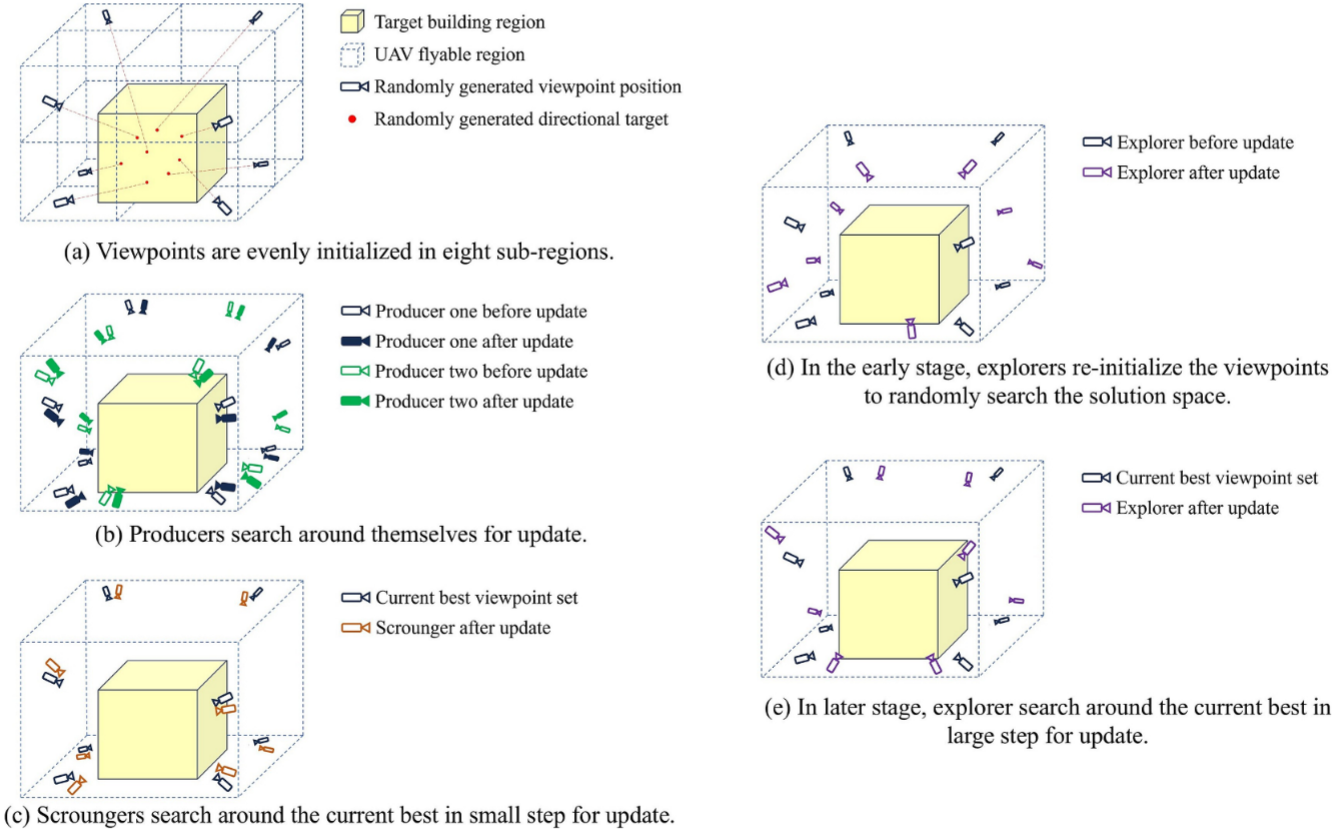
改进SSA中生产者承担全局搜索,通过对每个视角的位置与目标方向进行扰动,生产者能够在搜索空间内广泛探索,提升解的多样性与覆盖性。在优化初始阶段,设置了较多的生产者 P N 1 PN_1 PN1,相比于后期的数量 P N 2 PN_2 PN2显著增加,从而确保算法在早期具备更强的全局探索能力:
X i , j , k t + 1 = { X i , j , k t + α ∙ Q , S T > R 2 X i , j , k t + Q , S T ≤ R 2 X_{i,j,k}^{t+1}= \begin{cases} X_{i,j,k}^t+\alpha\bullet Q,ST>R_2 \\ \quad X_{i,j,k}^t+Q,ST\leq R_2 & \end{cases} Xi,j,kt+1={Xi,j,kt+α∙Q,ST>R2Xi,j,kt+Q,ST≤R2
觅食者主要承担局部开发任务,围绕当前最优视角集合进行小步长的精细搜索:
X i , j , k t + 1 = X b e s t t + 1 d ∑ k = 1 d ∣ X i , j , k t − X b e s t t ∣ ∙ r a n d ( { − 1 , 1 } ) X_{i,j,k}^{t+1}=X_{best}^t+\frac{1}{d}\sum_{k=1}^d\left|X_{i,j,k}^t-X_{best}^t\right|\bullet rand(\{-1,1\}) Xi,j,kt+1=Xbestt+d1k=1∑d Xi,j,kt−Xbestt ∙rand({−1,1})
探索者在早期生成新的视点集来探索解空间,并在后期围绕最佳视点集进行大步局部开发:
X i , j , k t + 1 = { i n i t ( ) , t < T max / 2 X b e s t t + β ∙ ∣ X i , j , k t − X b e s t t ∣ , t ≥ T max / 2 \left.X_{i,j,k}^{t+1}=\left\{ \begin{array} {c}init(),t<\mathrm{T}_{\max}/2 \\ X_{best}^t+\beta\bullet\left|X_{i,j,k}^t-X_{best}^t\right|,t\geq\mathrm{T}_{\max}/2 \end{array}\right.\right. Xi,j,kt+1={init(),t<Tmax/2Xbestt+β∙ Xi,j,kt−Xbestt ,t≥Tmax/2
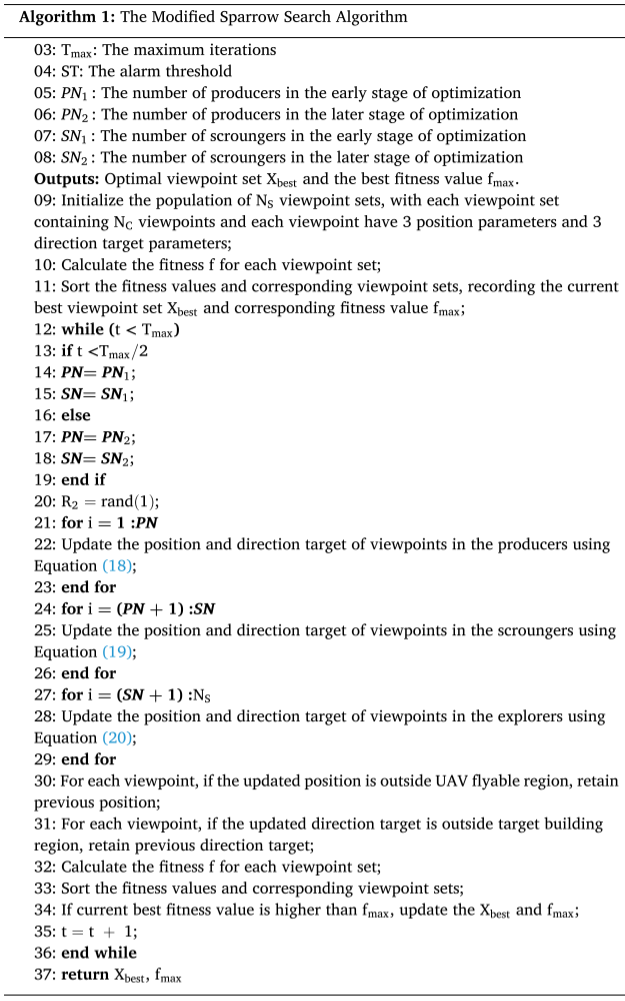
伪代码
5.结果展示
之前做的案例:

6.参考文献
[1] Liang Z, Yang L, Liang Z, et al. Optimized UAV view planning for high-quality 3D reconstruction of buildings using a modified sparrow search algorithm[J]. Advanced Engineering Informatics, 2025, 65: 103344.






的结构)







)


)

