
数据集概述
AstroNex空间任务智能控制研究与训练数据集是朗迪锋科技基于Multiverse平台精心打造的首个全面覆盖航天器智能控制全周期的综合数据集产品。该数据集汇集了轨道动力学、姿态控制、机器视觉、环境感知等多维度数据,为航天器智能算法研发提供丰富的训练与测试资源。
AstroNex由精确星历仿真计算、大规模地月GIS数据加载、真实火星地形高保真数字再现、航天器实时数据驱动等技术支持,确保数据的高精度、真实性与场景多样性,为航天器自主控制算法的研发与迭代提供坚实基础。
数据集特点
-
全面性:覆盖航天器全生命周期控制场景,包括轨道维持、姿态控制、交会对接、着陆等
-
高精度:基于精确的物理模型与仿真算法,确保数据符合真实空间环境特性
-
多样性:包含正常工况与边缘工况、常规任务与应急处置等多样化场景
-
标准化:数据格式统一,附带详细元数据与标注,便于算法开发与评估
-
可扩展:模块化设计,支持用户根据特定需求进行场景定制与数据生成
-
时效性:定期更新,融入最新航天任务数据与空间环境参数
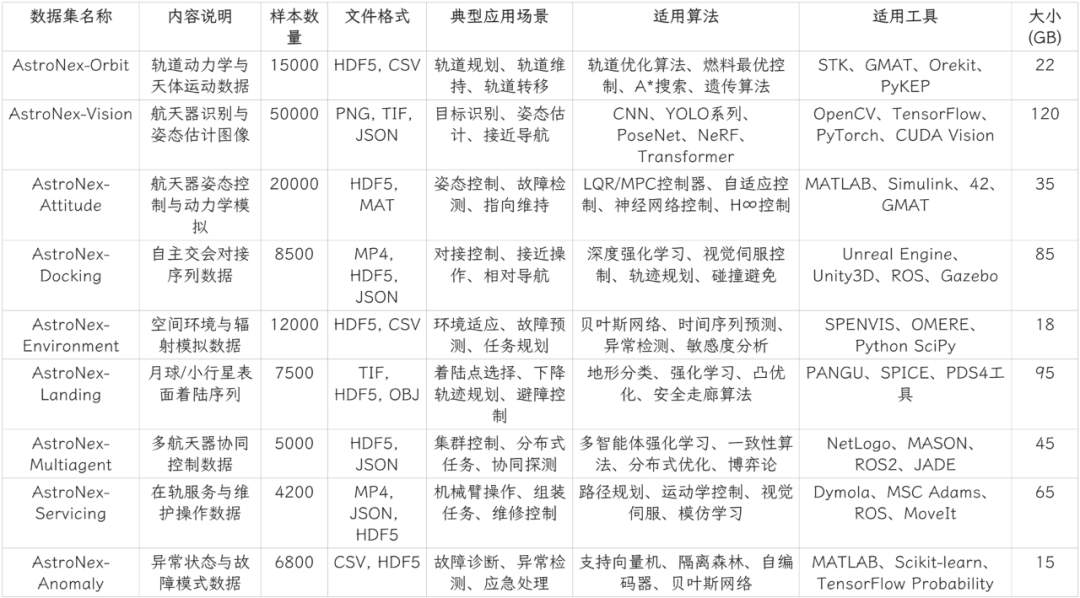
数据集构成
AstroNex包含9个专业子数据集,总计超过500GB数据,覆盖智能航天器控制领域的各类核心场景:
核心子集详解
AstroNex-Vision:航天器视觉感知数据集
AstroNex-Vision是目前国内最大规模的航天器视觉识别与导航数据集,包含50,000组高质量航天器图像数据,涵盖不同光照条件、视角、距离和姿态变化。
数据特点:
-
多类型航天器:覆盖15种常见航天器类型,包括卫星、空间站、货运飞船等
-
精确标注:所有图像均提供精确的边界框、分割掩码及关键点标注
-
多环境条件:模拟地球轨道、月球轨道、深空等多种背景环境
-
真实光照模拟:基于物理的渲染技术,精确模拟太空环境特殊光照条件
-
时序数据:包含连续接近序列,适用于目标跟踪算法研发
应用场景:
-
航天器自主识别与分类
-
相对姿态估计与跟踪
-
基于视觉的自主导航与接近
-
航天器状态与损伤评估
AstroNex-Docking:自主交会对接数据集

AstroNex-Docking专注于航天器自主交会对接场景,提供8,500组完整的对接过程序列数据。每组数据包含从初始探测到最终对接的连续状态记录,是智能对接算法开发的理想训练资源。
数据特点:
-
多视角观测:包含主动方、被动方及外部视角的观测数据
-
完整物理参数:记录相对位置、速度、姿态等完整动力学参数
-
多传感器融合:集成视觉、激光测距、雷达等多种传感器数据
-
异常情况模拟:包含姿态偏差、接口不对准等异常情况处理
-
高时间分辨率:最高0.01秒采样率,确保捕捉快速动态变化
应用场景:
-
自主交会对接控制算法开发
-
相对导航与位姿估计
-
异常情况识别与处理
-
安全接近策略优化
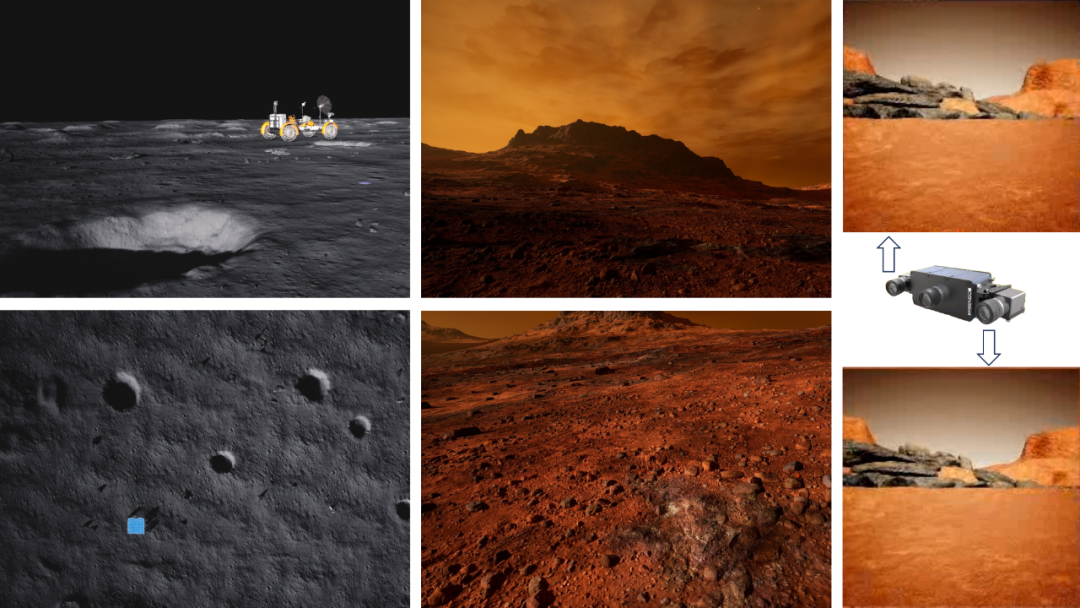
AstroNex-Landing:月球与小行星着陆数据集
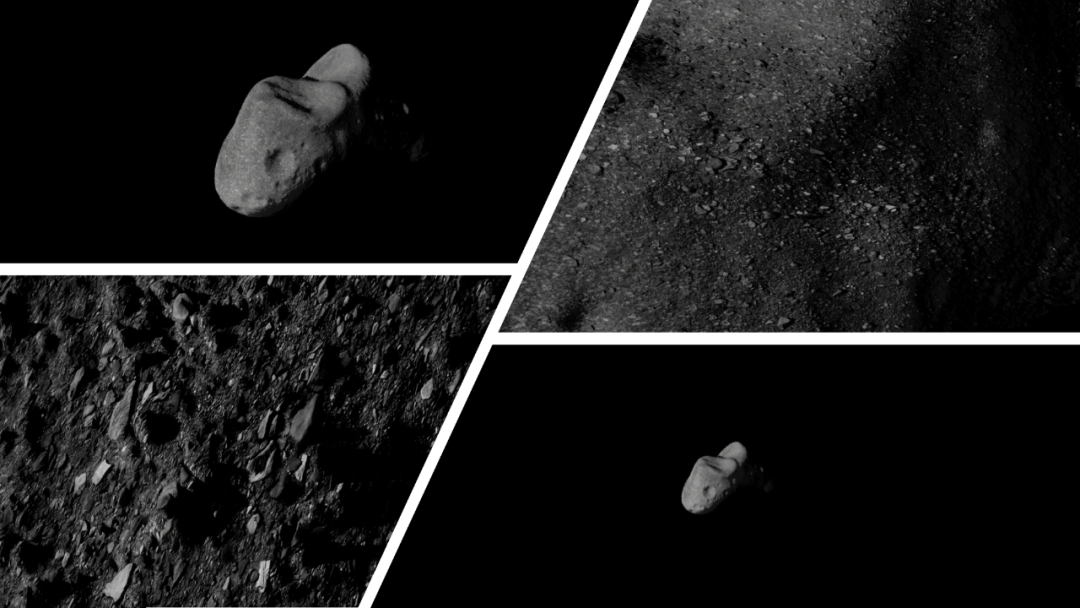
AstroNex-Landing聚焦深空探测器着陆导航与控制场景,包含7,500组月球与小行星表面的高精度着陆序列数据,为智能着陆算法提供全面训练素材。
数据特点:
-
高精度地形:基于实测数据构建的月球与小行星高分辨率地形模型
-
多传感器融合:包含光学、激光测距、雷达高度计等多源数据
-
动力学模拟:完整模拟着陆过程中的推力、姿态变化等参数
-
着陆区选择:提供多种地形条件下的最优着陆区参考
-
障碍物分布:包含岩石、陨石坑等障碍物的精确分布
应用场景:
-
智能着陆点选择
-
实时避障与轨迹规划
-
视觉导航与定位
-
推力最优控制
数据格式与组织
AstroNex采用标准化的数据格式与组织结构,确保用户可以高效地访问和处理数据:
-
统一元数据格式:每个子数据集均提供标准JSON格式的元数据描述
-
时间同步:所有子数据集的时间戳保持一致,支持多源数据融合
-
坐标系统标准化:统一采用J2000坐标系,并提供坐标转换工具
-
数据版本控制:完整的版本记录,支持增量更新
-
标注一致性:所有手工标注数据均经过专家多轮验证,确保准确性
基准测试与评估
-
AstroNex提供一系列标准化的基准测试与评估指标,方便用户对算法性能进行客观评估:
-
AstroNex-Benchmark-Vision:航天器视觉识别与姿态估计基准
-
AstroNex-Benchmark-Docking:自主交会对接控制精度与稳定性基准
-
AstroNex-Benchmark-Landing:着陆精度与燃料效率基准
-
AstroNex-Benchmark-Anomaly:异常检测与故障诊断基准
每项基准测试均提供标准化评估流程、参考实现与排行榜,支持客户对不同算法进行定量比较。
配套工具与支持
数据处理与可视化工具
-
AstroNex-Viewer:直观可视化各类数据,支持3D轨道与姿态动态展示
-
AstroNex-Preprocessor:标准化数据预处理工具,支持多格式转换
-
AstroNex-Simulator:基于数据集快速构建仿真环境,支持闭环测试
API与集成支持
-
提供Python、MATLAB、C++等主流语言的API接口
-
支持与TensorFlow、PyTorch、OpenCV等框架无缝集成
-
提供Docker容器化部署方案,确保环境一致性
专家支持与定制服务
-
技术文档与教程:详细的使用指南与最佳实践
-
专家咨询:专业团队提供算法开发与数据应用咨询
-
定制化服务:根据特定需求定制数据生成与算法优化方案
应用案例
AstroNex已在多个航天智能控制项目中成功应用,显著提升了算法开发效率与性能:
1. 某航天科研院所使用AstroNex-Vision开发的目标识别算法,在复杂光照条件下将识别准确率提升30%
2. 某空间技术公司利用AstroNex-Docking数据训练的自主导航控制系统,将控制精度提高25%,算法迭代时间降低60%
3. 某深空探测项目基于AstroNex-Landing开发的着陆点选择算法,在模拟测试中表现优于传统方法50%
产品规格与授权方式
基本版
-
包含全部9个子数据集
-
标准API与工具支持
-
年度更新服务
-
技术文档与使用指南
专业版
-
基本版全部内容
-
专家技术支持(40小时/年)
-
算法评估与优化建议
-
定制场景生成(5个/年)
-
优先获取数据更新
企业版
-
专业版全部内容
-
专属定制数据生成
-
现场技术支持与培训
-
算法联合开发支持
-
无限制的场景定制
总结
AstroNex是朗迪锋科技基于Multiverse平台推出的航天器智能控制算法研发专用数据集产品,为航天器自主控制、机器视觉、任务规划等领域的算法研发提供全面的数据支持。通过高质量的数据、标准化的格式与 完善的工具支持,AstroNex致力于加速智能航天技术的发展与应用,为中国航天事业的智能化转型提供有力支持。
简单介绍。)
![[7-1] ADC模数转换器 江协科技学习笔记(14个知识点)](http://pic.xiahunao.cn/[7-1] ADC模数转换器 江协科技学习笔记(14个知识点))





)
)
开机向导配置)

)


,自定义UI)



)
